Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
チャッドローン:LLMによる画像認識を用いた自律型ドローンシステムの開発と実験 / ec75-...
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
yumulab
March 18, 2025
Research
1.5k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
チャッドローン:LLMによる画像認識を用いた自律型ドローンシステムの開発と実験 / ec75-morisaki
2025年3月18日(火)の情報処理学会エンタテインメントコンピューティング(EC)研究発表会 発表スライド
yumulab
March 18, 2025
More Decks by yumulab
See All by yumulab
非試合日の野球場を楽しむためのARホームランボールキャッチ体験システムの開発 / EC79-miyazaki
yumulab
0
320
MR流体を用いたセルフセンシング可能な触覚デバイスの提案 / haptics36-kamimura
yumulab
0
81
Bluetooth Low Energyの海に潜る / Dive to Bluetooth Low Energy
yumulab
0
150
湯村研究室の紹介2025 / yumulab2025
yumulab
0
370
Proposal of an Information Delivery Method for Electronic Paper Signage Using Human Mobility as the Communication Medium / ICCE-Asia 2025
yumulab
0
360
研究室から社会へ 〜 情報科学でつなぐ科学技術コミュニケーション実践 / #CoSTEP20th
yumulab
0
200
A Proposal of an Information Delivery Method using Human Movement as a Communication Medium for Electronic Paper Signage / ICEC2025
yumulab
0
160
メタバース空間で対話相⼿に向かって⾃律移動するAIアバター『ノア』の開発 / EC2025-Oyamada
yumulab
0
380
足位置の視覚的提示による電子オルガンのペダル鍵盤演奏学習支援システムの提案 / EC2025-Hokin
yumulab
0
320
Other Decks in Research
See All in Research
NLP colloquium: AI Safety Survey
kanekomasahiro
0
880
AIで最適化を解けるか?
mickey_kubo
0
140
論文紹介 "ReSim: Reliable World Simulation for Autonomous Driving"
kogo
0
710
Scalable dynamic origin-destination demand estimation enhanced by high-resolution satellite imagery data
satai
3
370
RS-Agent: Automating Remote Sensing Tasks through Intelligent Agent
satai
3
420
Claude Code × autoresearch 実践
mathbullet
0
210
GLIM とMegaParticles:正規分布近似の限界とタイトカップリング&パーティクルフィルタの進展 / GLIM and MegaParticles : Progress of the distribution representation in SLAM
koide3
0
630
JICA QUEST 共創×革新プログラム Impact Report(海ノ向こうコーヒー)
ontheslope
0
250
東京大学工学部計数工学科、計数工学特別講義の説明資料
kikuzo
0
580
全国町字単位空き家率推定データver1.0データ仕様
microbaseinc
0
160
データセンター事業者を取り巻く近年の状況とその中での研究開発動向、テストベッドへの貢献の可能性
kikuzo
1
280
nlp2026 In-Context Learningに基づく経路案内のための地理的知識の活用方法に関する検討
takashiinui
0
110
Featured
See All Featured
Art, The Web, and Tiny UX
lynnandtonic
304
22k
The Language of Interfaces
destraynor
162
27k
Build The Right Thing And Hit Your Dates
maggiecrowley
39
3.4k
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
How to optimise 3,500 product descriptions for ecommerce in one day using ChatGPT
katarinadahlin
PRO
1
3.7k
Crafting Experiences
bethany
1
230
How to Think Like a Performance Engineer
csswizardry
28
2.7k
Technical Leadership for Architectural Decision Making
baasie
3
450
Side Projects
sachag
455
43k
Building an army of robots
kneath
306
46k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2.1k
Discover your Explorer Soul
emna__ayadi
2
1.2k
Transcript
チャッドローン LLMによる画像認識を用いた 自律型ドローンシステムの開発と実験 森崎 一歩,湯村 翼 北海道情報大学
研究背景 2 • 災害、物流、エンタテインメントなどの様々な 分野でドローンが活用 • ドローンの有効活用には熟練した操縦士が必要 • 自律飛行に注目
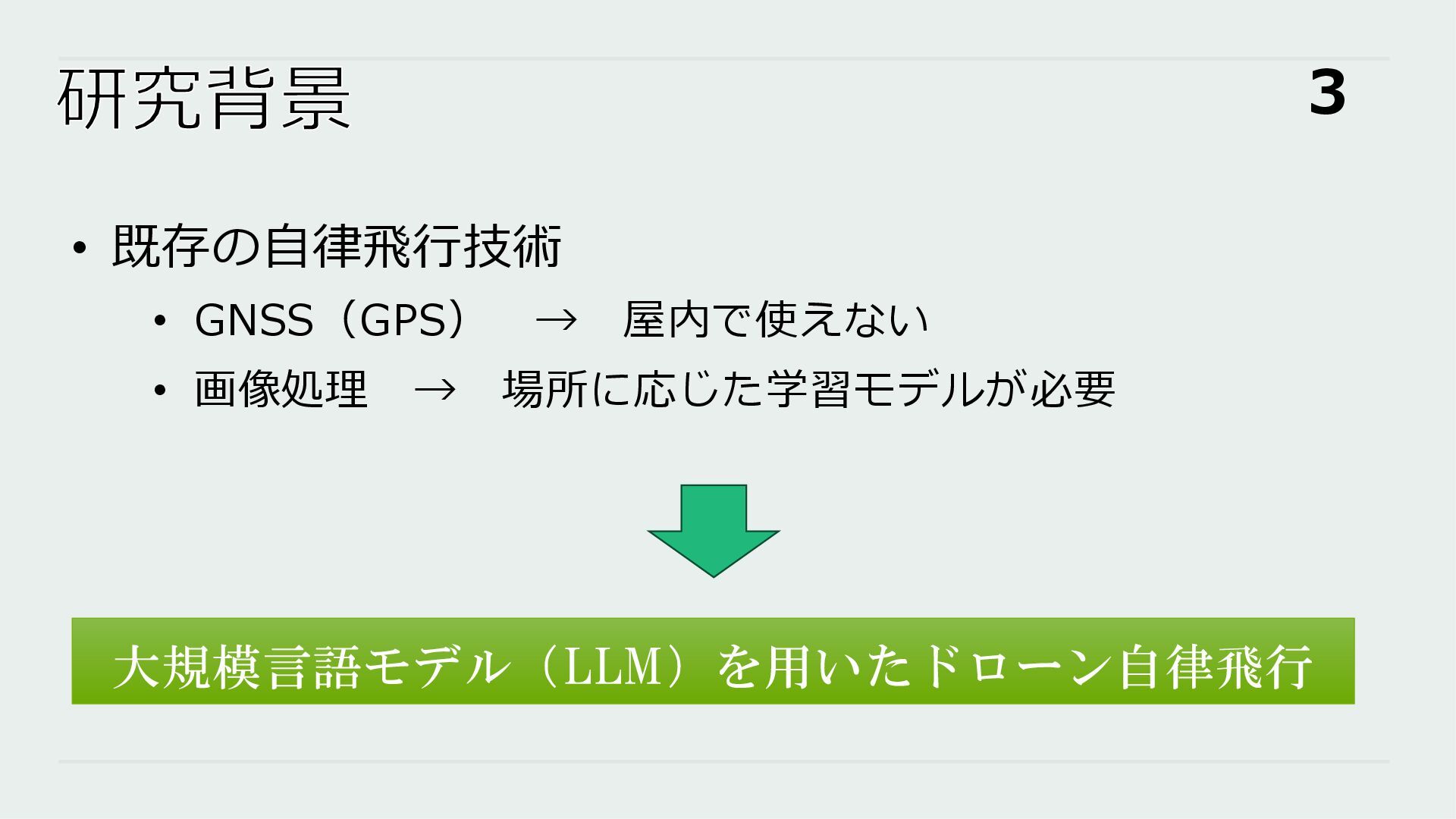
研究背景 3 • 既存の自律飛行技術 • GNSS(GPS) → 屋内で使えない • 画像処理
→ 場所に応じた学習モデルが必要 大規模言語モデル(LLM)を用いたドローン自律飛行
関連研究 4 • 池山安杜里, 山内翔,鈴木恵二: 大規模言語モデルによるドローンの 広域景観撮影システムの提案 (2023) [1] •
自律飛行のウェイポイント(通過点)の設定にLLMを活用 • 屋内を対象としていない • Vemprala, S. H., Bonatti, R., Bucker, A. and Kapoor, A.: Chatgpt for robotics: Design principles and model abilities (2024) [2] • ロボティクス制御へのLLM適用に関する設計原則を提示 • 対話的な制御を想定
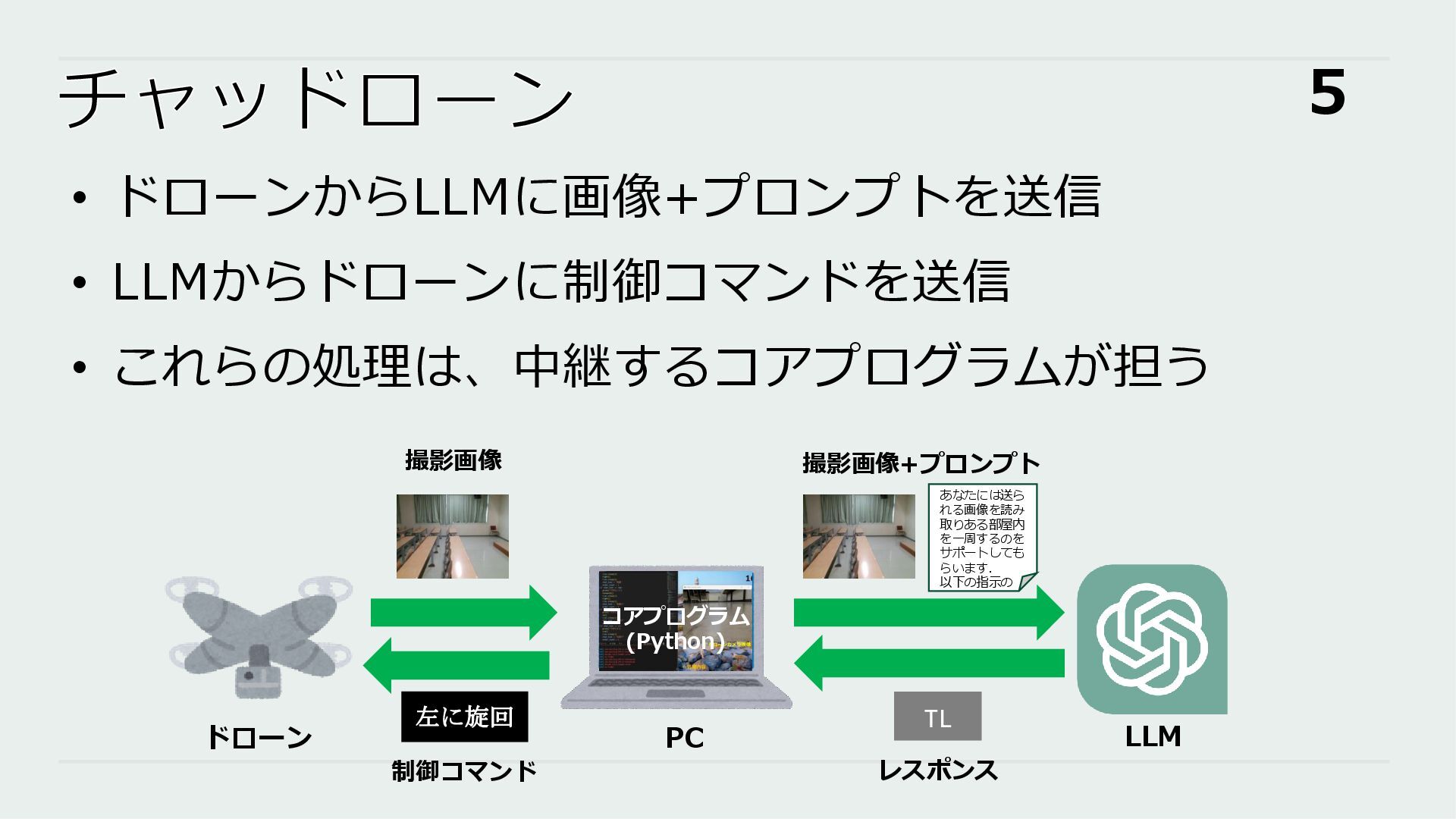
チャッドローン 5 • ドローンからLLMに画像+プロンプトを送信 • LLMからドローンに制御コマンドを送信 • これらの処理は、中継するコアプログラムが担う ドローン PC
LLM コアプログラム (Python) 撮影画像 撮影画像+プロンプト あなたには送ら れる画像を読み 取りある部屋内 を一周するのを サポートしても らいます. 以下の指示の TL 左に旋回 レスポンス 制御コマンド
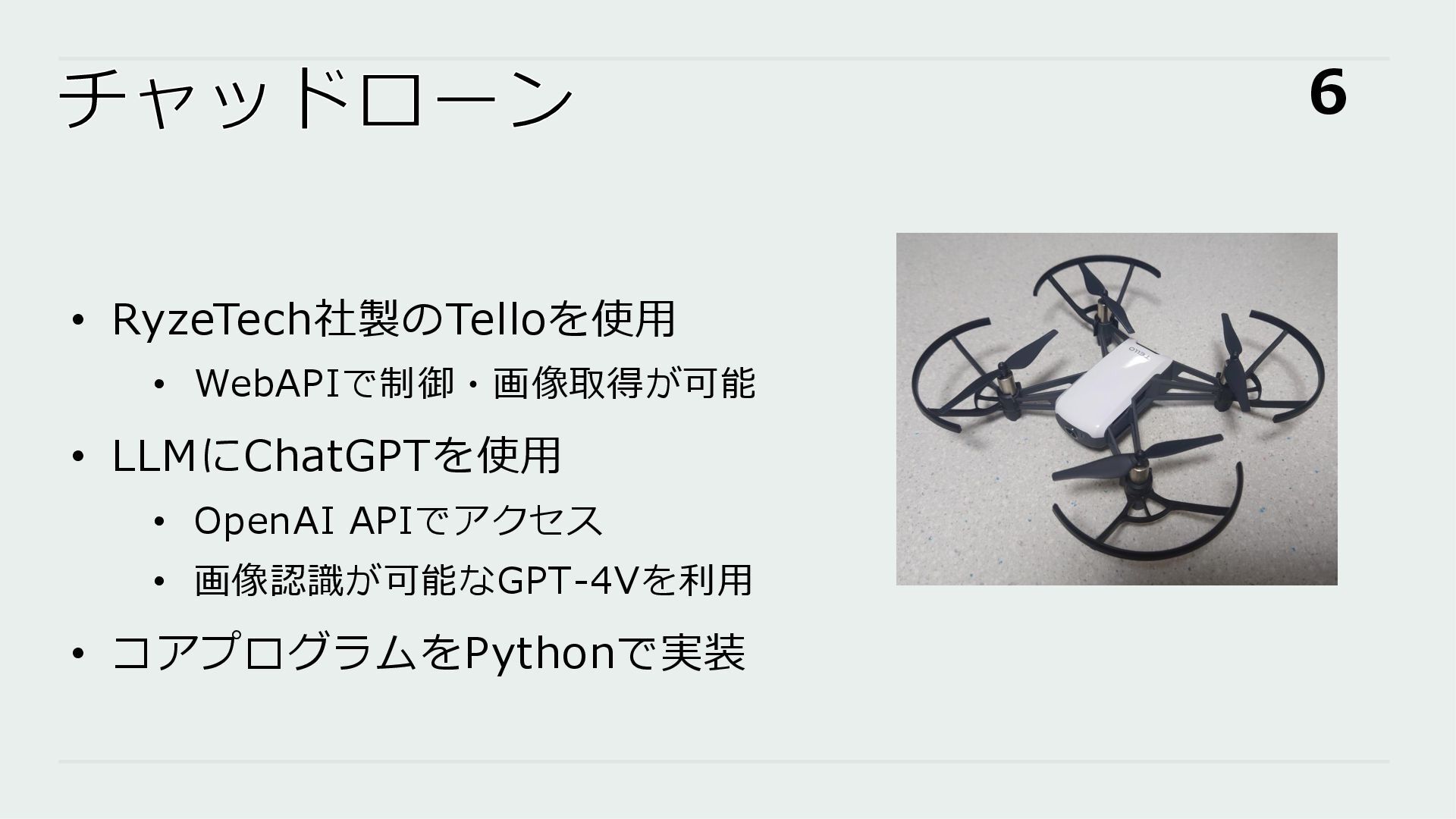
チャッドローン 6 • RyzeTech社製のTelloを使用 • WebAPIで制御・画像取得が可能 • LLMにChatGPTを使用 • OpenAI
APIでアクセス • 画像認識が可能なGPT-4Vを利用 • コアプログラムをPythonで実装
プロンプト 7 • 矩形の部屋内の壁沿いを巡回するプロンプトを作成 • 以下のルールのもとでプロンプトを作成 • 冒頭に概要を記述 • 画像を読み取り,当てはまる状況を選択肢から選択して
返答する旨を記述 • 状況の選択肢を記述 • どの選択肢も当てはまらない場合の指示を記述 (Ver.2 に追加)
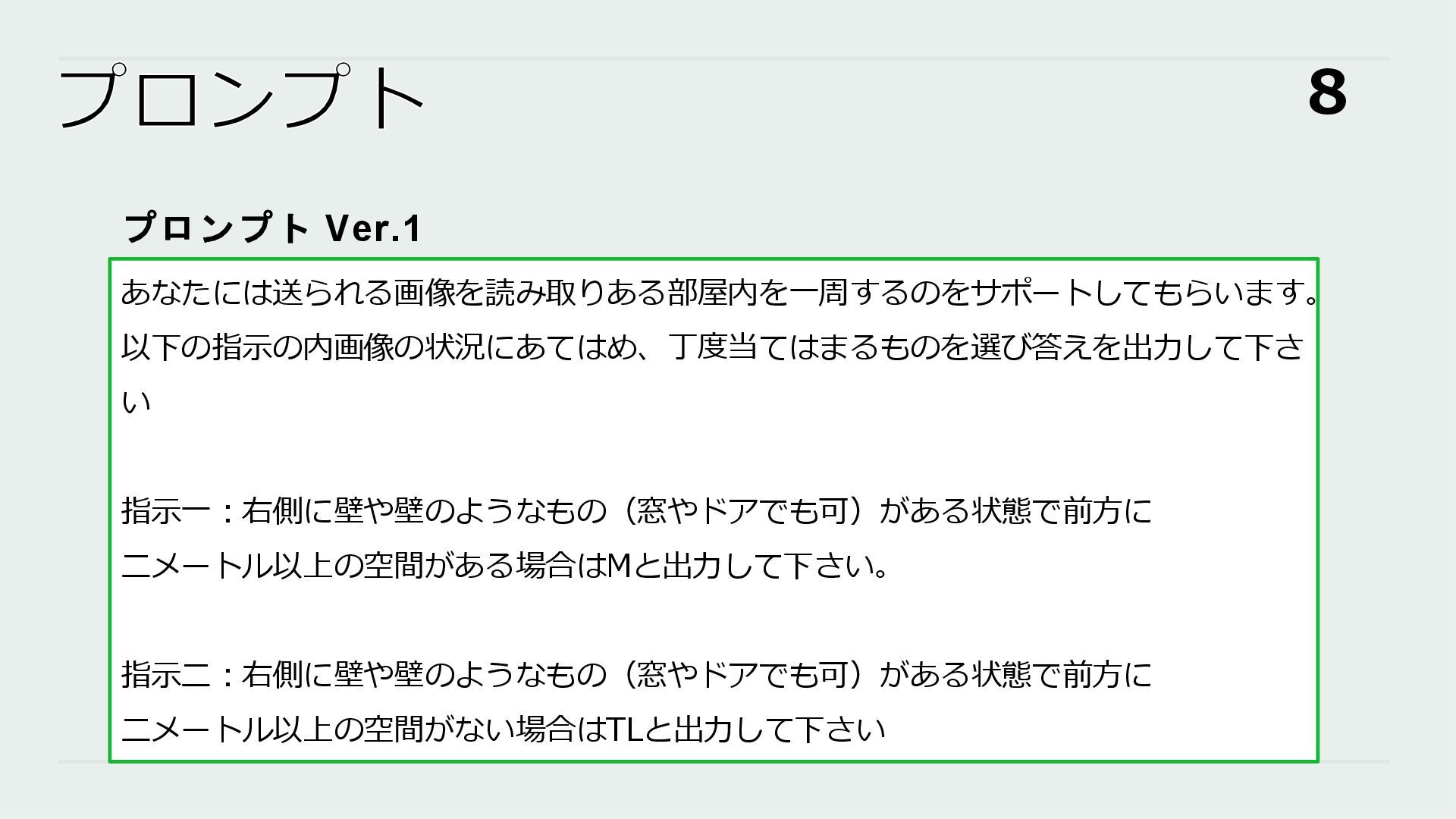
プロンプト 8 あなたには送られる画像を読み取りある部屋内を一周するのをサポートしてもらいます。 以下の指示の内画像の状況にあてはめ、丁度当てはまるものを選び答えを出力して下さ い 指示一:右側に壁や壁のようなもの(窓やドアでも可)がある状態で前方に 二メートル以上の空間がある場合はMと出力して下さい。 指示二:右側に壁や壁のようなもの(窓やドアでも可)がある状態で前方に 二メートル以上の空間がない場合はTLと出力して下さい プロンプト
Ver.1
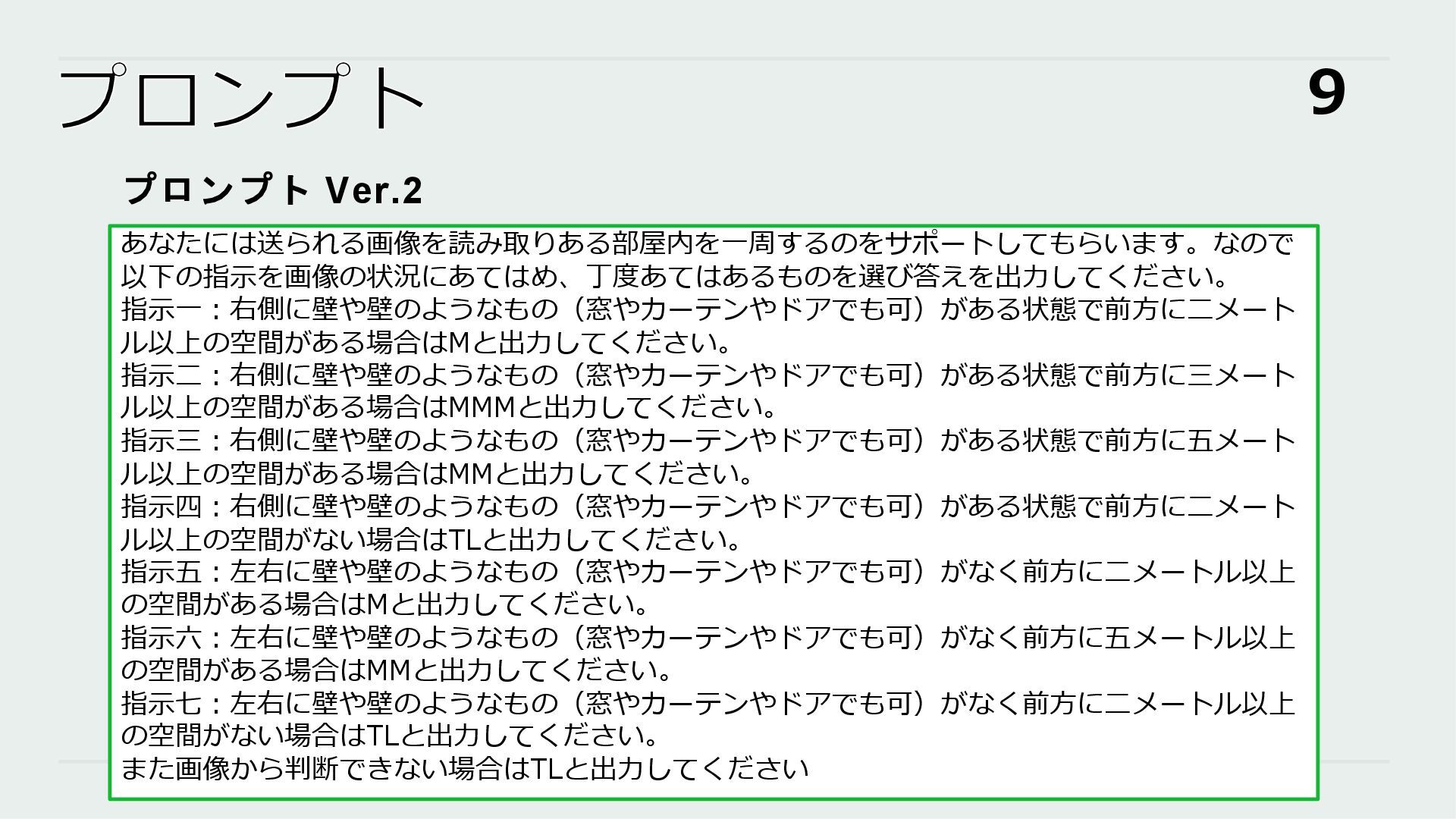
プロンプト 9 あなたには送られる画像を読み取りある部屋内を一周するのをサポートしてもらいます。なので 以下の指示を画像の状況にあてはめ、丁度あてはあるものを選び答えを出力してください。 指示一:右側に壁や壁のようなもの(窓やカーテンやドアでも可)がある状態で前方に二メート ル以上の空間がある場合はMと出力してください。 指示二:右側に壁や壁のようなもの(窓やカーテンやドアでも可)がある状態で前方に三メート ル以上の空間がある場合はMMMと出力してください。 指示三:右側に壁や壁のようなもの(窓やカーテンやドアでも可)がある状態で前方に五メート ル以上の空間がある場合はMMと出力してください。
指示四:右側に壁や壁のようなもの(窓やカーテンやドアでも可)がある状態で前方に二メート ル以上の空間がない場合はTLと出力してください。 指示五:左右に壁や壁のようなもの(窓やカーテンやドアでも可)がなく前方に二メートル以上 の空間がある場合はMと出力してください。 指示六:左右に壁や壁のようなもの(窓やカーテンやドアでも可)がなく前方に五メートル以上 の空間がある場合はMMと出力してください。 指示七:左右に壁や壁のようなもの(窓やカーテンやドアでも可)がなく前方に二メートル以上 の空間がない場合はTLと出力してください。 また画像から判断できない場合はTLと出力してください プロンプト Ver.2
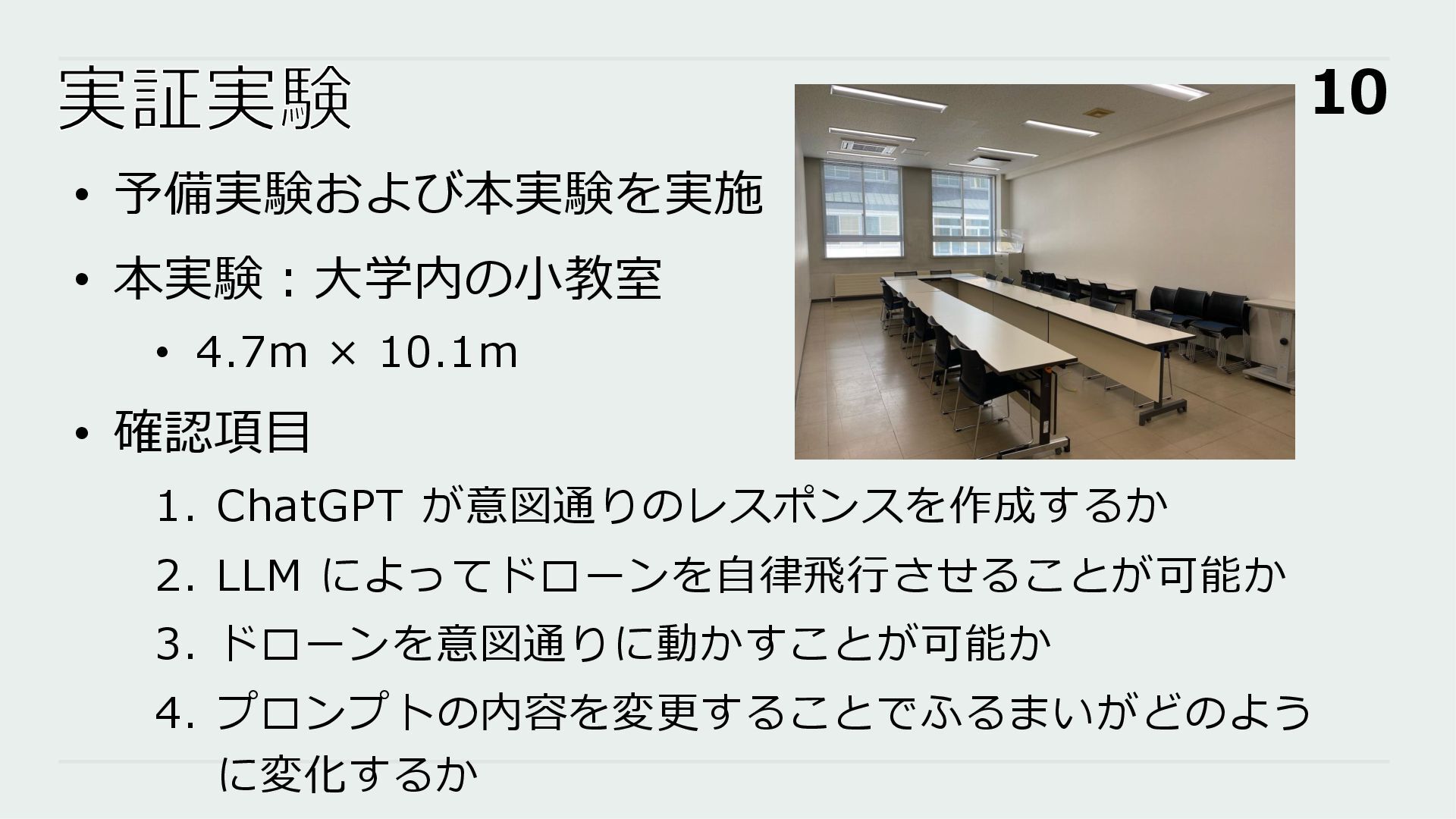
実証実験 10 • 予備実験および本実験を実施 • 本実験:大学内の小教室 • 4.7m × 10.1m
• 確認項目 1. ChatGPT が意図通りのレスポンスを作成するか 2. LLM によってドローンを自律飛行させることが可能か 3. ドローンを意図通りに動かすことが可能か 4. プロンプトの内容を変更することでふるまいがどのよう に変化するか
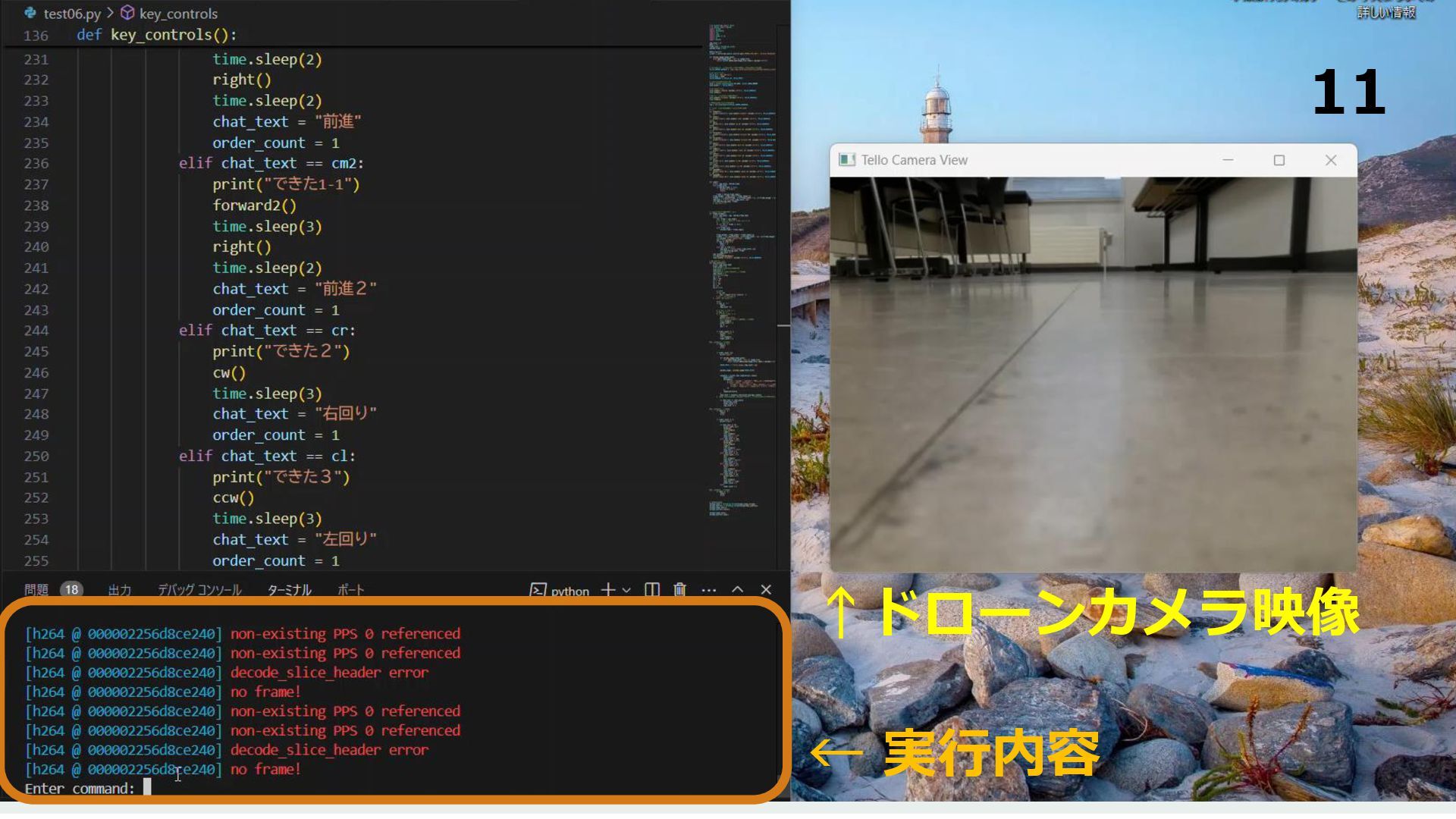
← 実行内容 ↑ドローンカメラ映像 11
実証実験 | 結果 12 1. ChatGPT が意図通りのレスポンスを作成するか → 2. LLM
によってドローンを自律飛行させることが可能か → 3. ドローンを意図通りに動かすことが可能か → 4. プロンプトの内容を変更することでふるまいがどのように変化 するか → 自律飛行にユーザの意図を反映
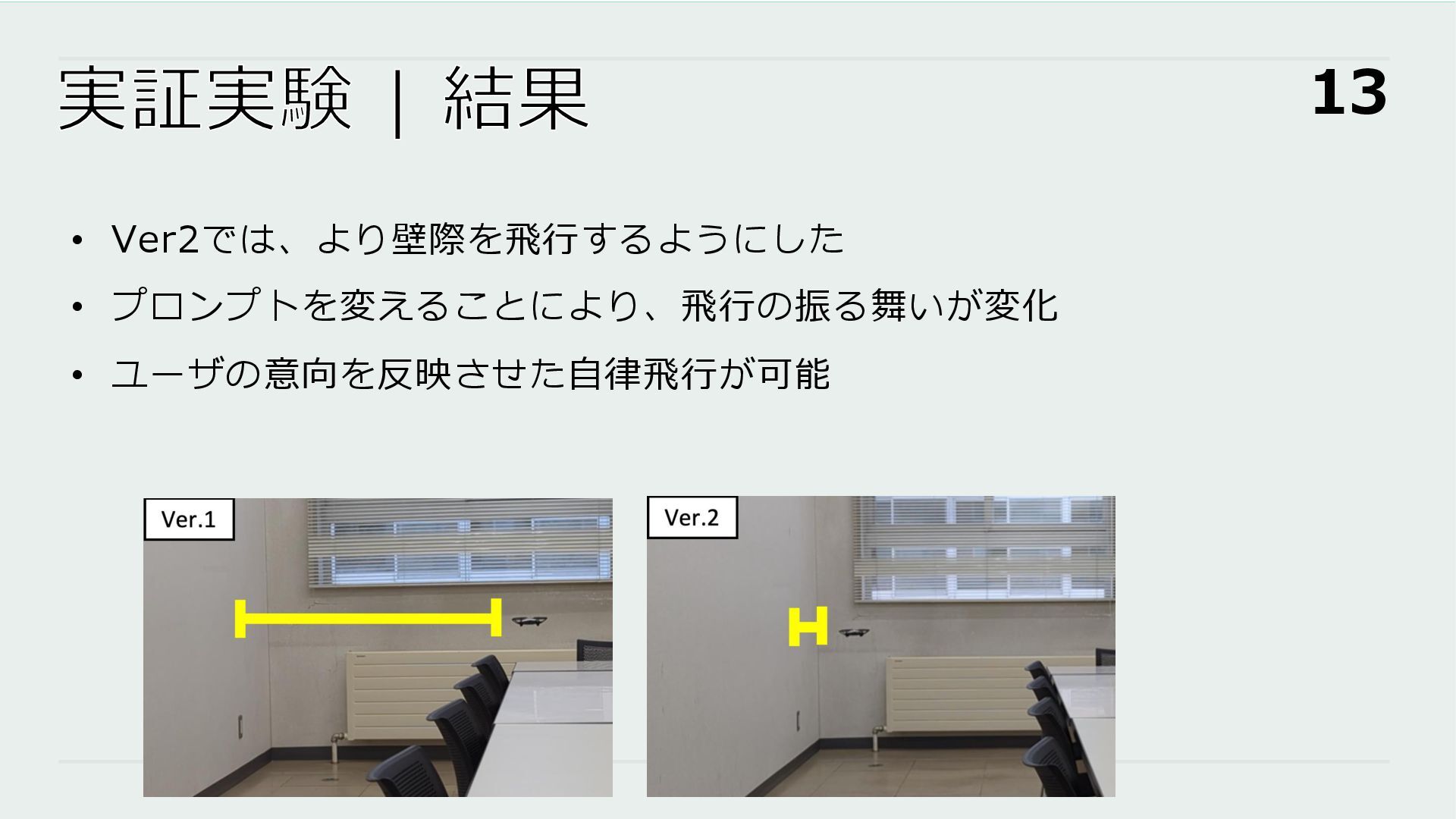
実証実験 | 結果 13 • Ver2では、より壁際を飛行するようにした • プロンプトを変えることにより、飛行の振る舞いが変化 • ユーザの意向を反映させた自律飛行が可能
課題 14 • 割り込み制御の仕組みの必要性 • 本研究では、撮影と制御コマンドを周期的に実行 • 急激な環境変化に対応できない • プロンプトの詳細化にともなう応答の遅延
• Ver.1と比べてVer.2のプロンプトでは応答時間が3倍以 上となる場合もあった • 飛行精度とのトレードオフ
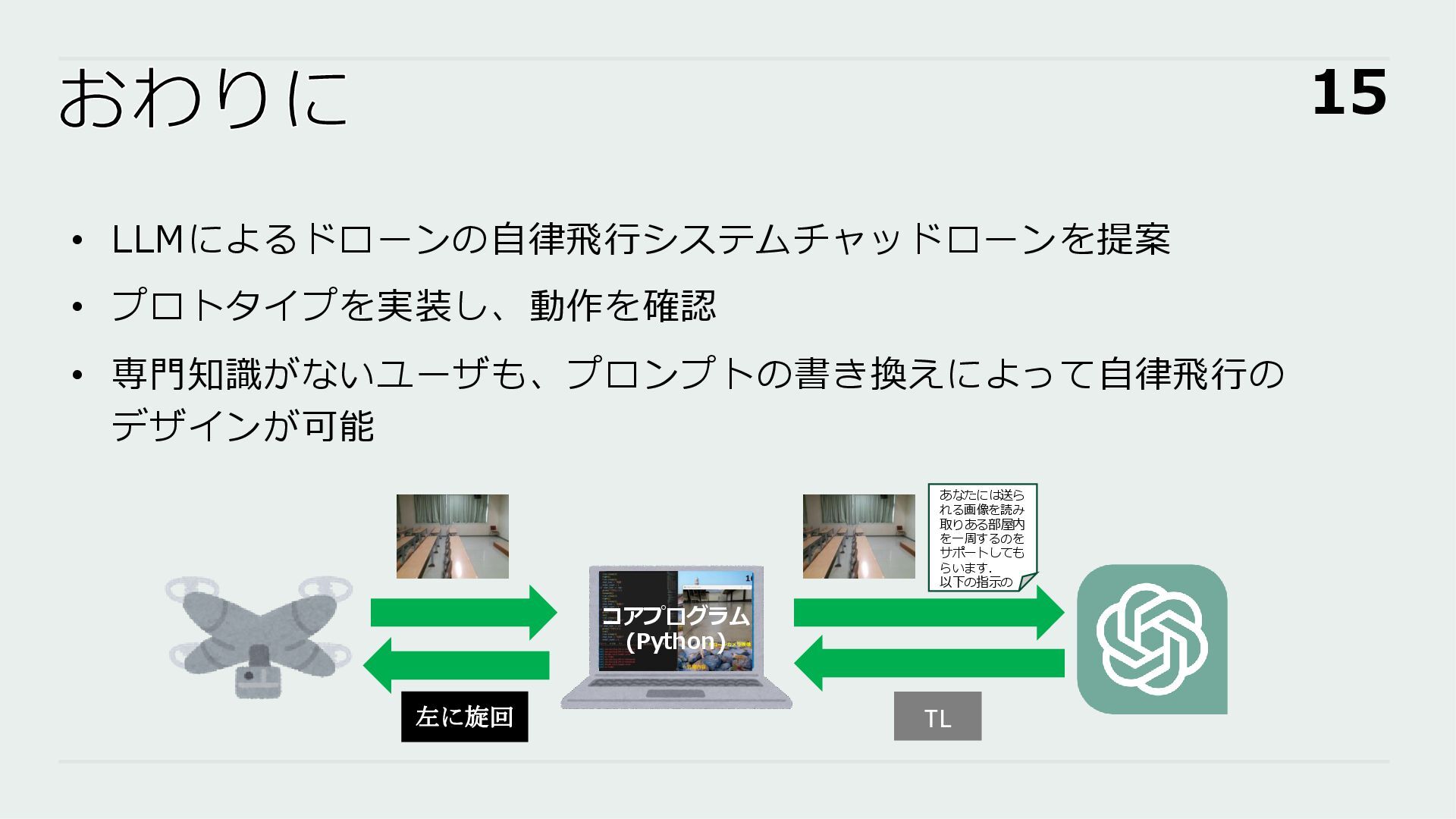
おわりに 15 • LLMによるドローンの自律飛行システムチャッドローンを提案 • プロトタイプを実装し、動作を確認 • 専門知識がないユーザも、プロンプトの書き換えによって自律飛行の デザインが可能 コアプログラム
(Python) あなたには送ら れる画像を読み 取りある部屋内 を一周するのを サポートしても らいます. 以下の指示の TL 左に旋回
{kind=link}
{kind=link}
{kind=link}
![関連研究 4 • 池山安杜里, 山内翔,鈴木恵二: 大規模言語モデルによるドローンの 広域景観撮影システムの提案 (2023) [1] •](https://files.speakerdeck.com/presentations/e6699af89d714e2eb08b7fa22d9d5e28/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}