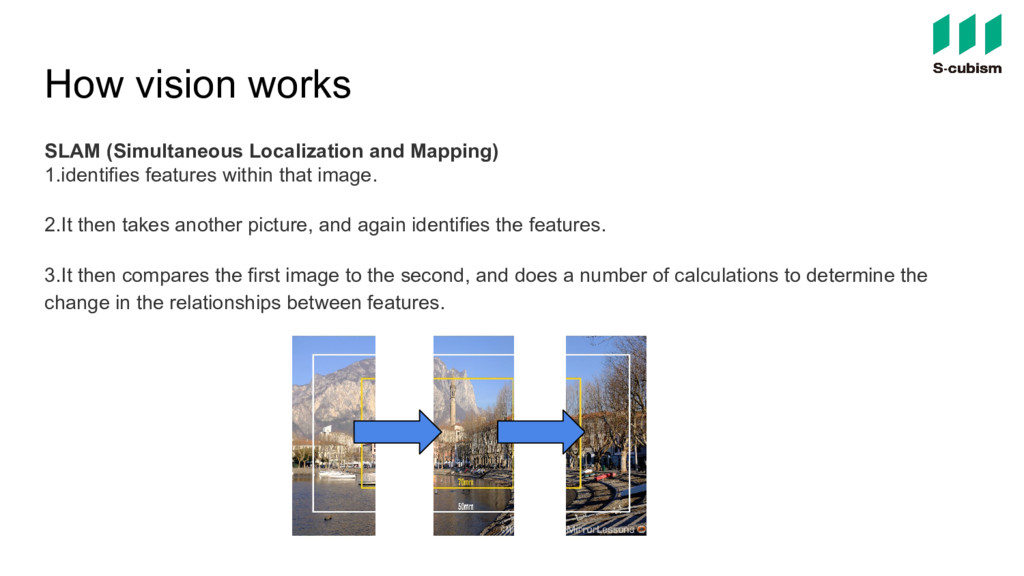
within that image. 2.It then takes another picture, and again identifies the features. 3.It then compares the first image to the second, and does a number of calculations to determine the change in the relationships between features.
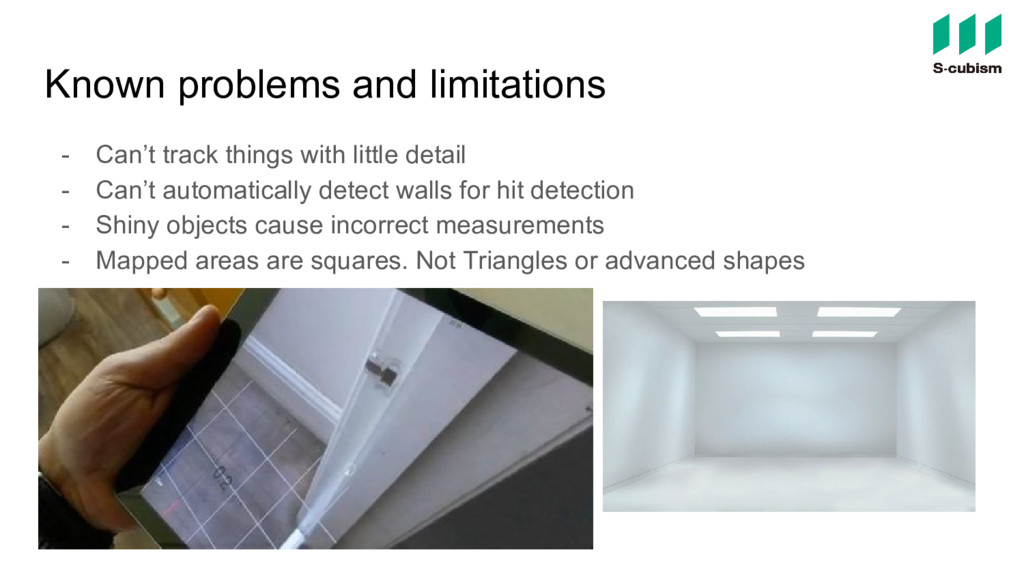
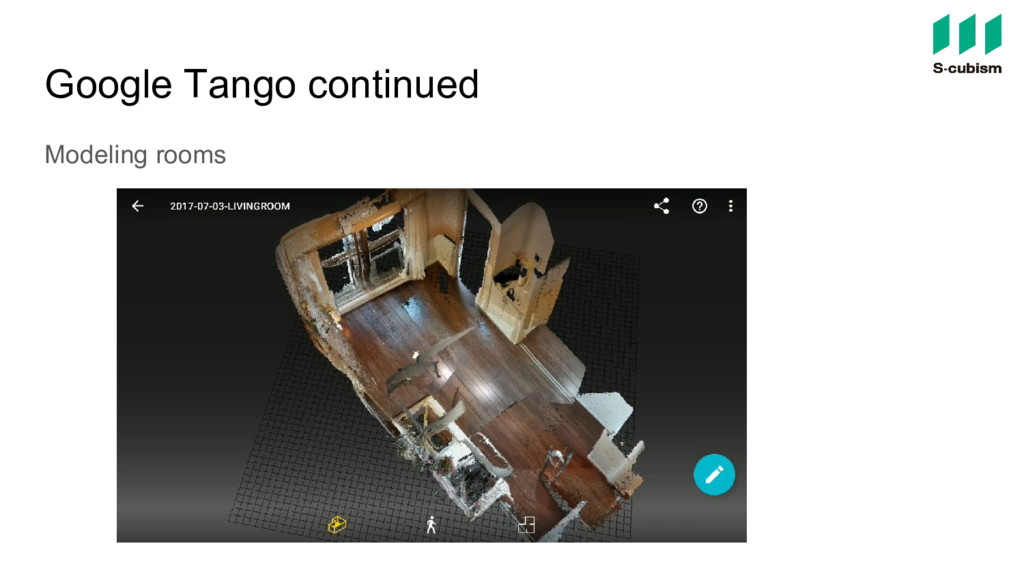
detail - Can’t automatically detect walls for hit detection - Shiny objects cause incorrect measurements - Mapped areas are squares. Not Triangles or advanced shapes
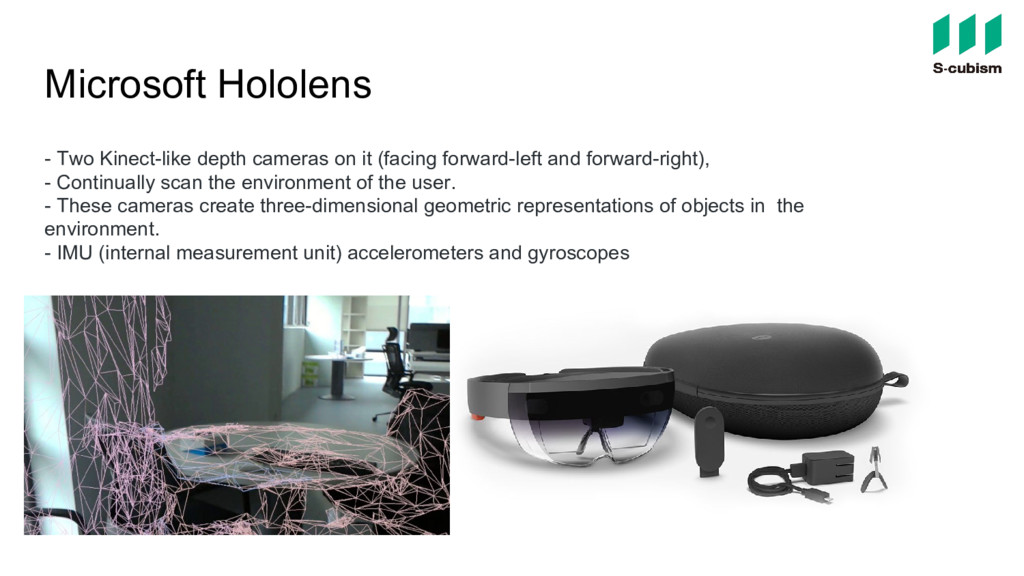
forward-left and forward-right), - Continually scan the environment of the user. - These cameras create three-dimensional geometric representations of objects in the environment. - IMU (internal measurement unit) accelerometers and gyroscopes
A11 chips running IOS11 • iPhone 6s and 6s Plus • iPhone 7 and 7 Plus • iPhone SE • iPad Pro (9.7, 10.5 or 12.9) – both first-gen and 2nd-gen • iPad (2017) • iPhone 8 and 8 Plus • iPhone X
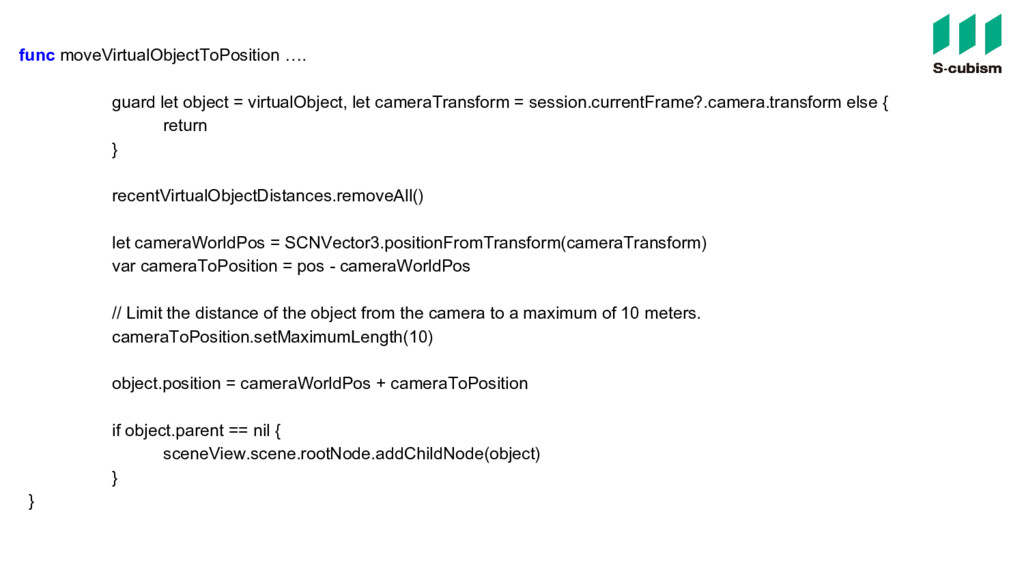
= session.currentFrame?.camera.transform else { return } recentVirtualObjectDistances.removeAll() let cameraWorldPos = SCNVector3.positionFromTransform(cameraTransform) var cameraToPosition = pos - cameraWorldPos // Limit the distance of the object from the camera to a maximum of 10 meters. cameraToPosition.setMaximumLength(10) object.position = cameraWorldPos + cameraToPosition if object.parent == nil { sceneView.scene.rootNode.addChildNode(object) } }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Items static let availableObjects: [VirtualObject] = [ Candle(), Cup(), Vase(),](https://files.speakerdeck.com/presentations/54147fe78cd644b4b0e9e3171eaad3b9/slide_15.jpg){kind=link}
{kind=link}
{kind=link}