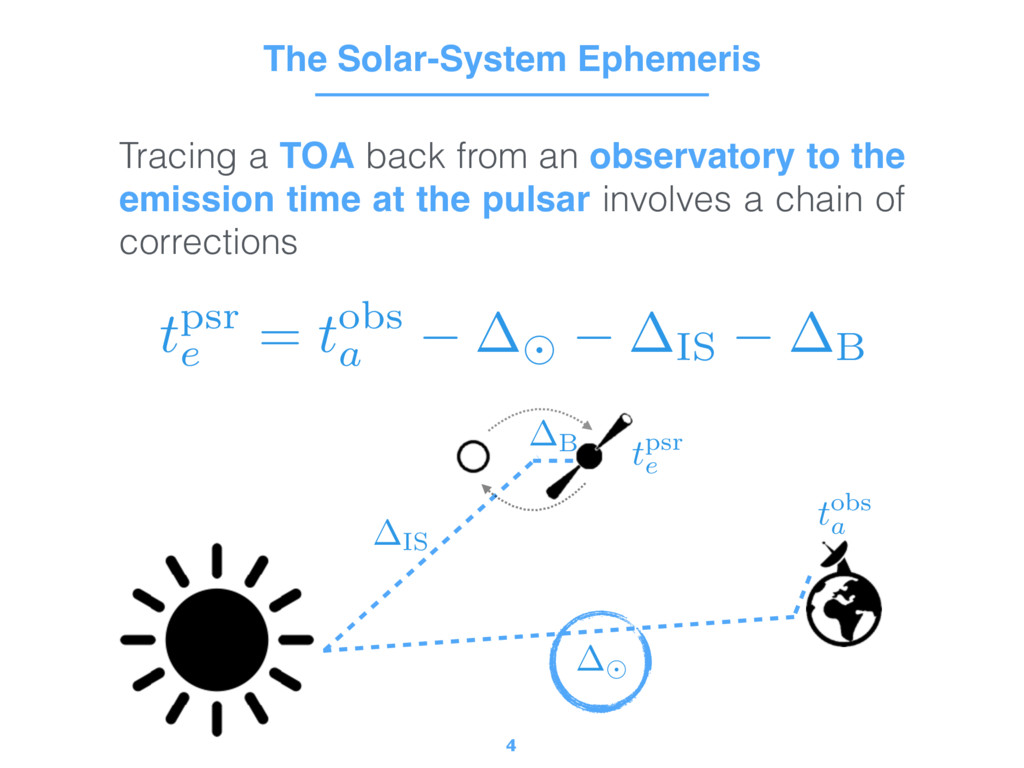
the quasi-inertial frame of the SSB (need Roemer delay) Roemer delay dependent on masses & orbits of all important dynamical objects don’t need SSB to navigate probes to planets (accurate SSB is not a big priority) the Roemer is not fit for in Tempo2, it is subtracted from pre-fit JPL solutions The Solar-System Ephemeris
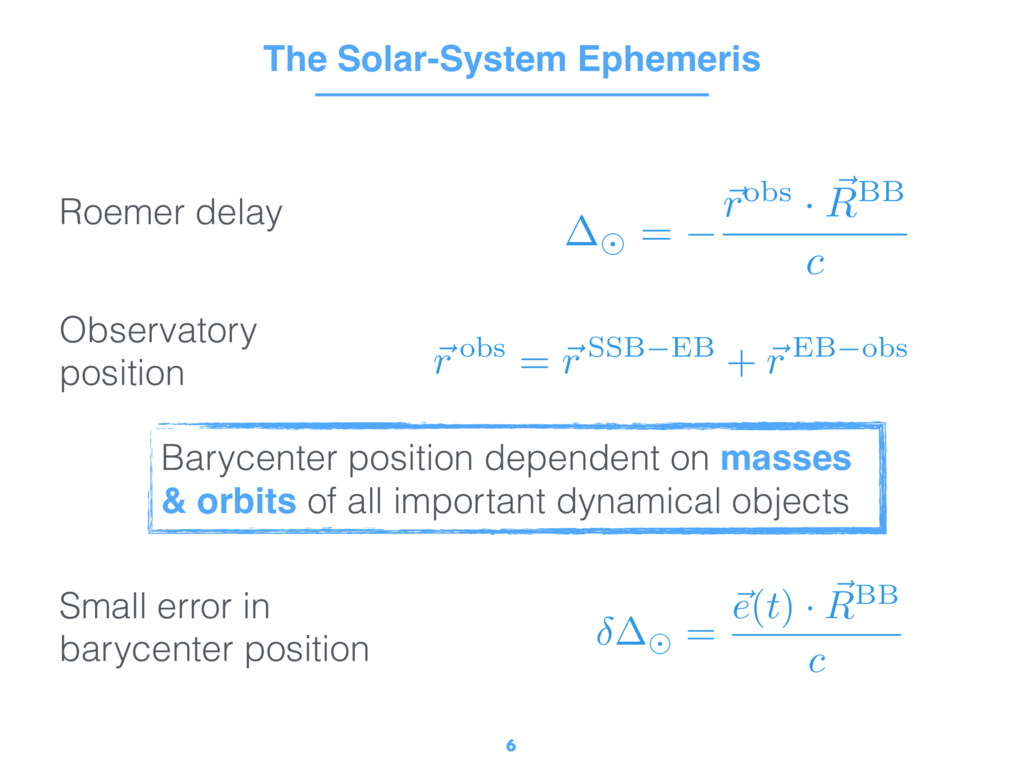
c Barycenter position dependent on masses & orbits of all important dynamical objects ~ r obs = ~ r SSB EB + ~ r EB obs = ~ e(t) · ~ RBB c Roemer delay Observatory position Small error in barycenter position
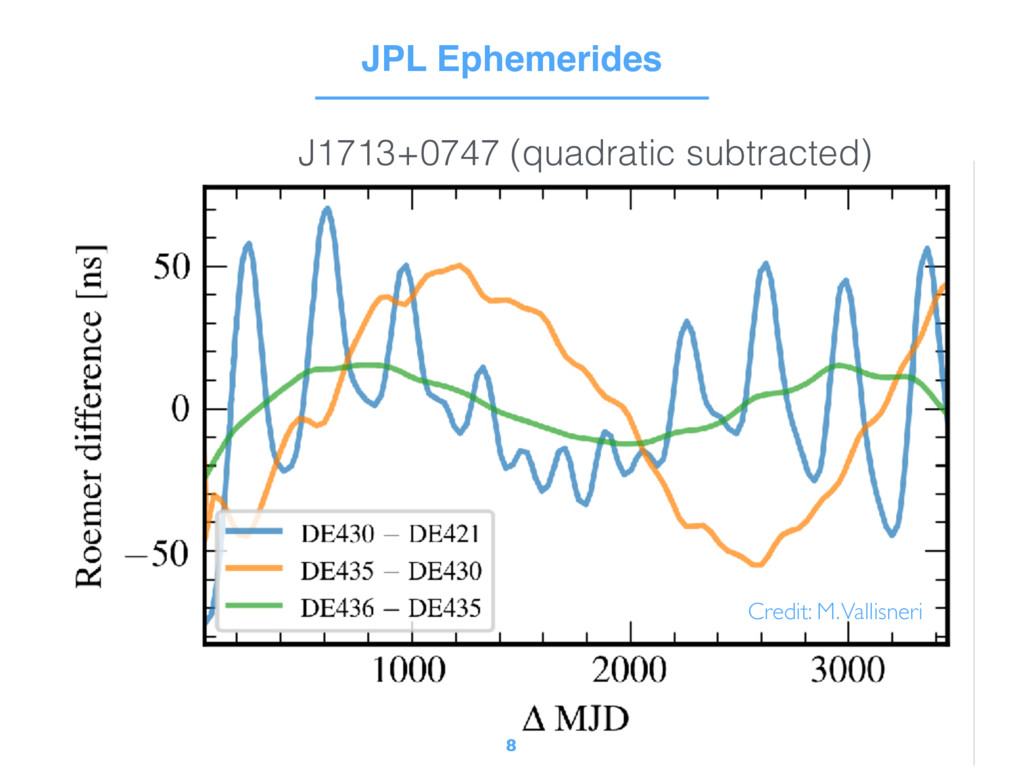
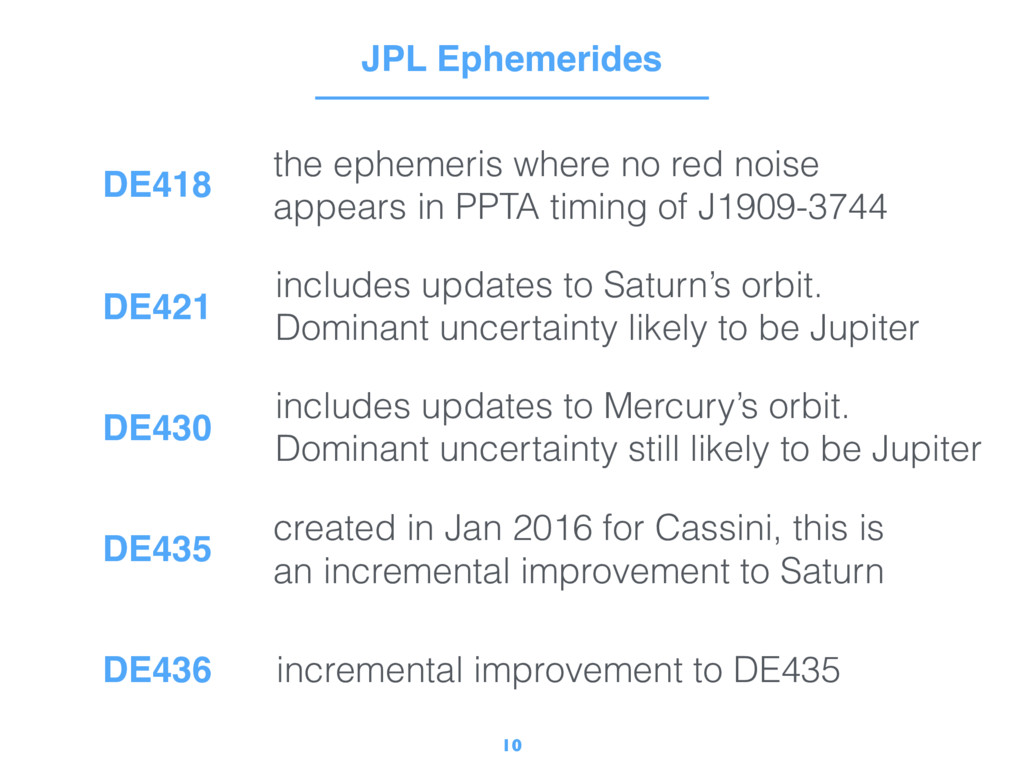
timing of J1909-3744 JPL Ephemerides DE418 DE421 DE430 DE435 DE436 includes updates to Saturn’s orbit. Dominant uncertainty likely to be Jupiter includes updates to Mercury’s orbit. Dominant uncertainty still likely to be Jupiter created in Jan 2016 for Cassini, this is an incremental improvement to Saturn incremental improvement to DE435
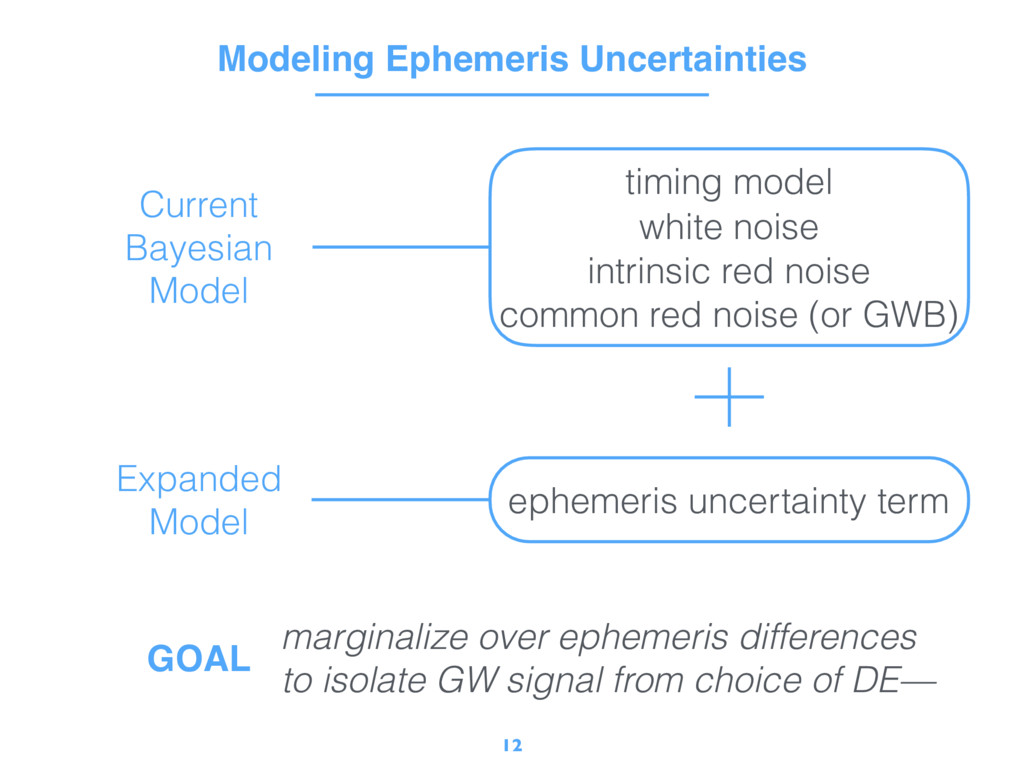
noise common red noise (or GWB) Current Bayesian Model ephemeris uncertainty term Expanded Model marginalize over ephemeris differences to isolate GW signal from choice of DE— GOAL
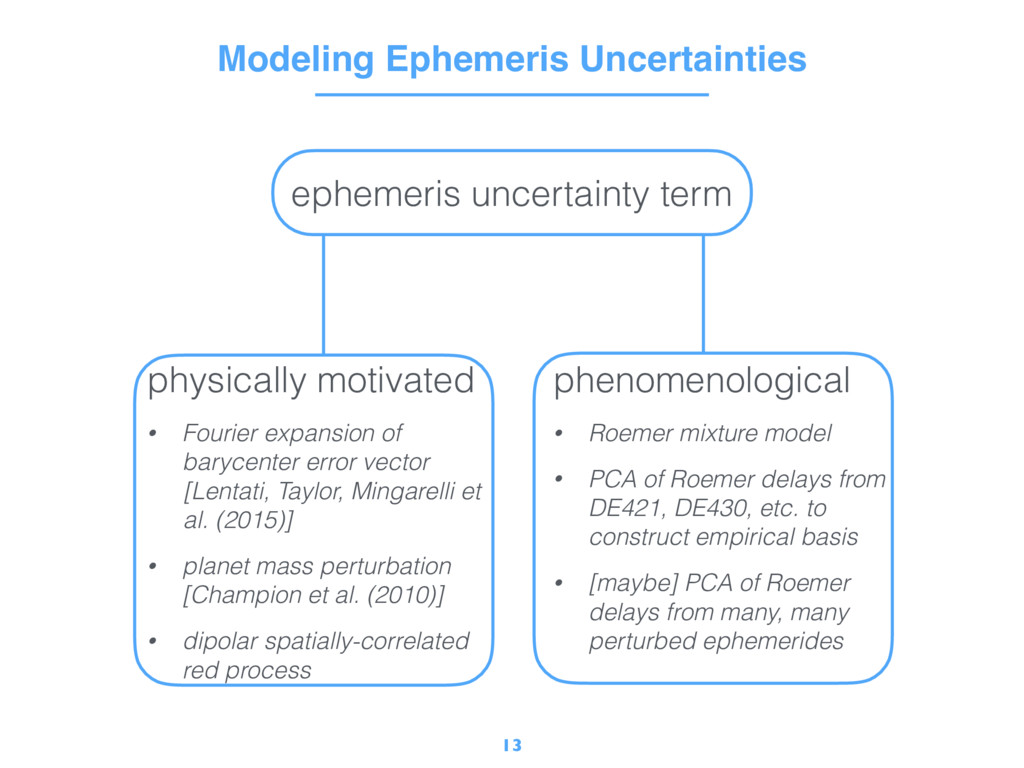
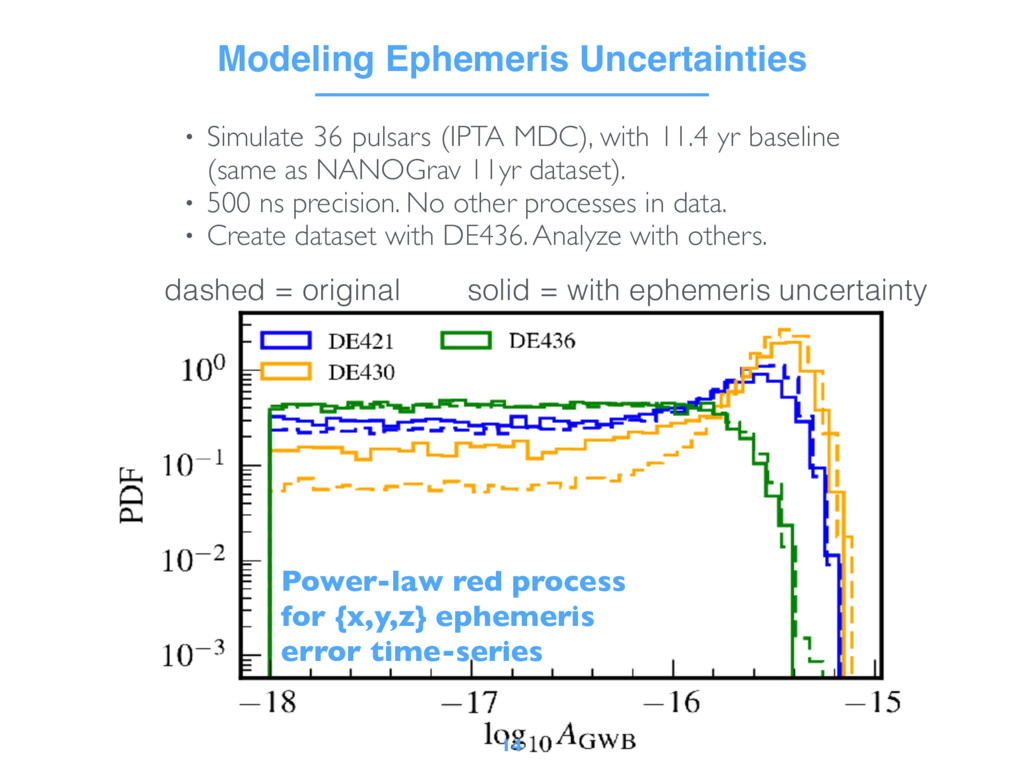
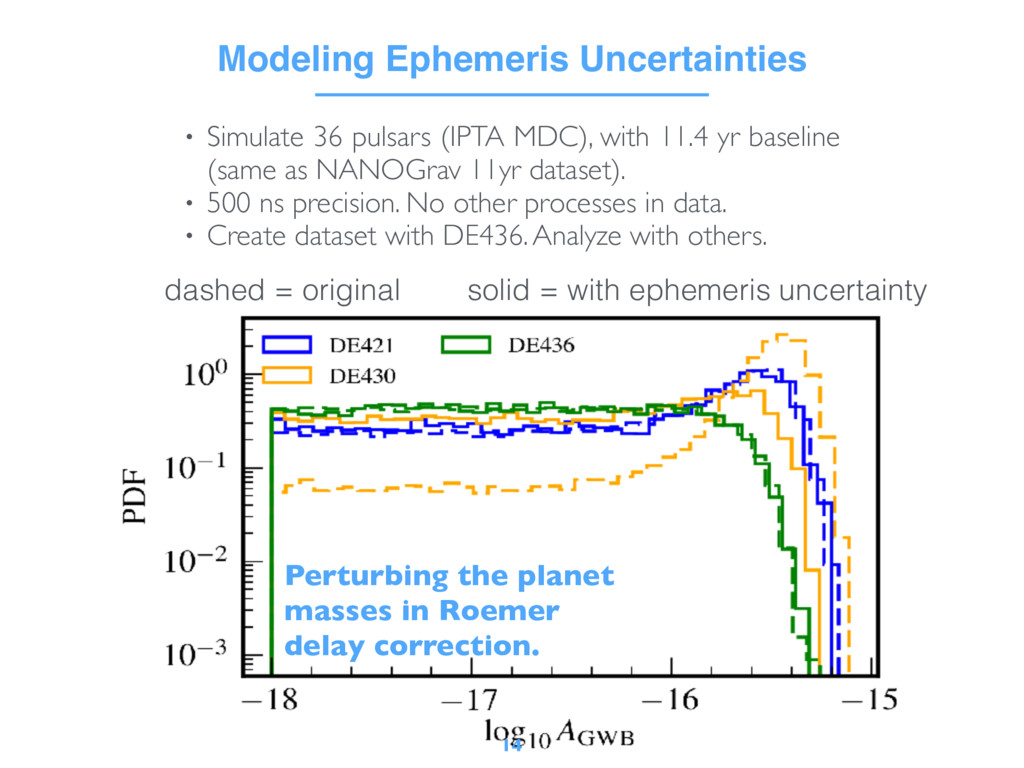
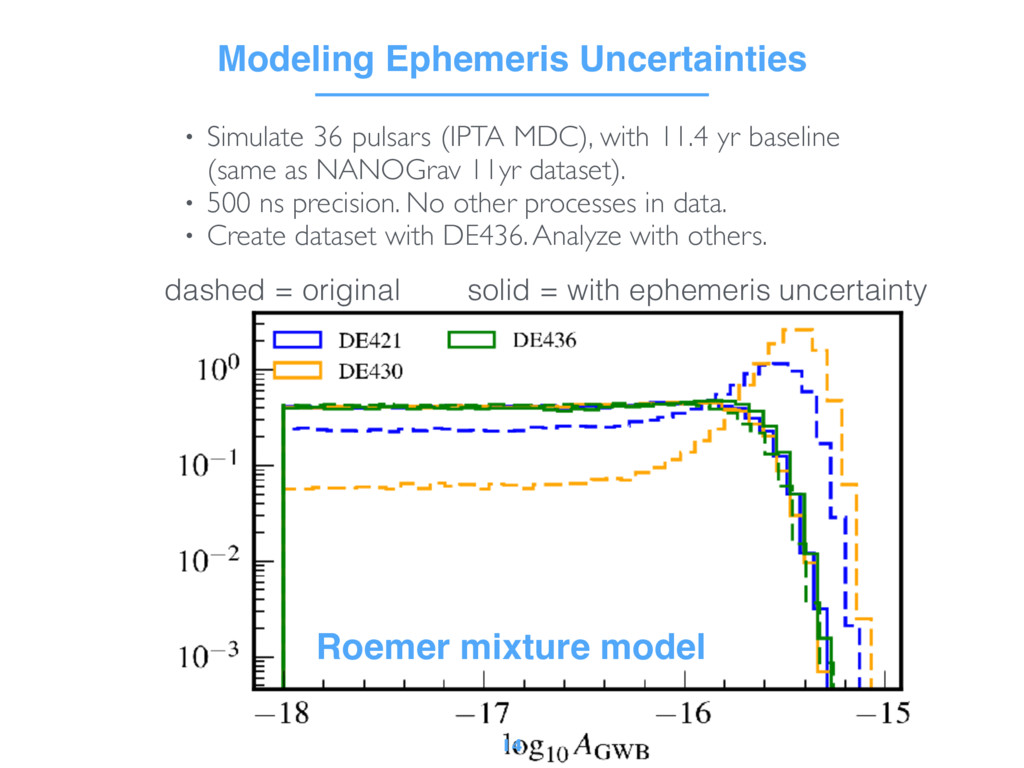
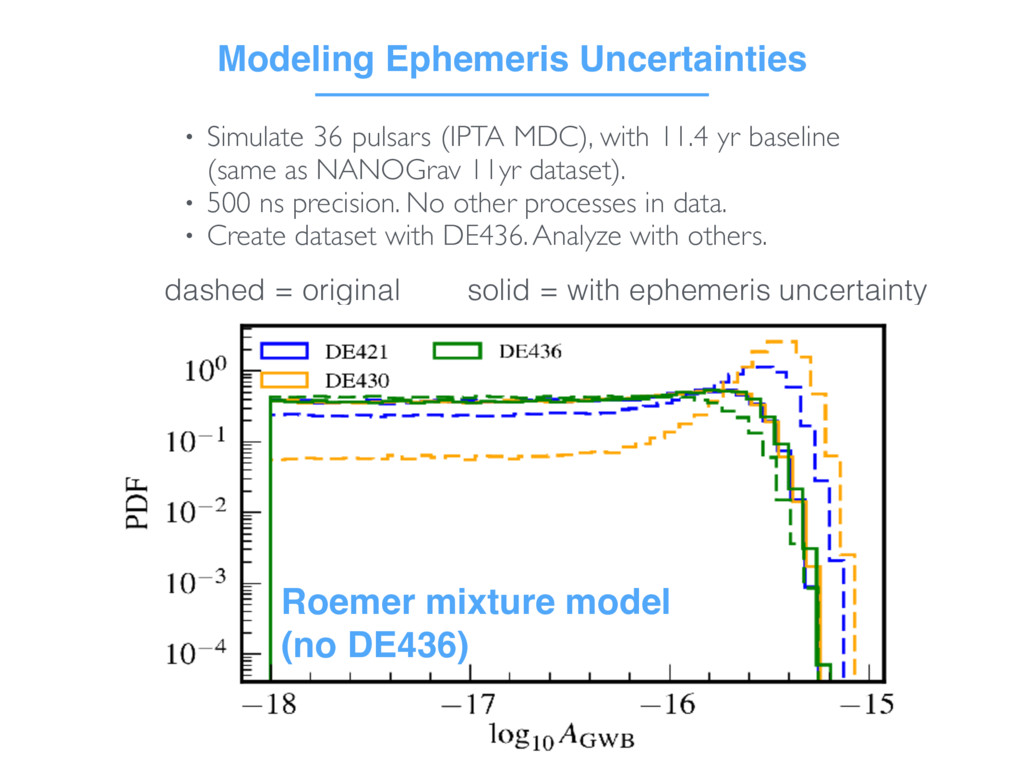
Fourier expansion of barycenter error vector [Lentati, Taylor, Mingarelli et al. (2015)] • planet mass perturbation [Champion et al. (2010)] • dipolar spatially-correlated red process phenomenological • Roemer mixture model • PCA of Roemer delays from DE421, DE430, etc. to construct empirical basis • [maybe] PCA of Roemer delays from many, many perturbed ephemerides
Ephemeris Uncertainties • Simulate 36 pulsars (IPTA MDC), with 11.4 yr baseline (same as NANOGrav 11yr dataset). • 500 ns precision. No other processes in data. • Create dataset with DE436. Analyze with others. dashed = original solid = with ephemeris uncertainty
Ephemeris Uncertainties • Simulate 36 pulsars (IPTA MDC), with 11.4 yr baseline (same as NANOGrav 11yr dataset). • 500 ns precision. No other processes in data. • Create dataset with DE436. Analyze with others. dashed = original solid = with ephemeris uncertainty
pulsars (IPTA MDC), with 11.4 yr baseline (same as NANOGrav 11yr dataset). • 500 ns precision. No other processes in data. • Create dataset with DE436. Analyze with others. dashed = original solid = with ephemeris uncertainty
pulsars (IPTA MDC), with 11.4 yr baseline (same as NANOGrav 11yr dataset). • 500 ns precision. No other processes in data. • Create dataset with DE436. Analyze with others. dashed = original solid = with ephemeris uncertainty Roemer mixture model (no DE436)
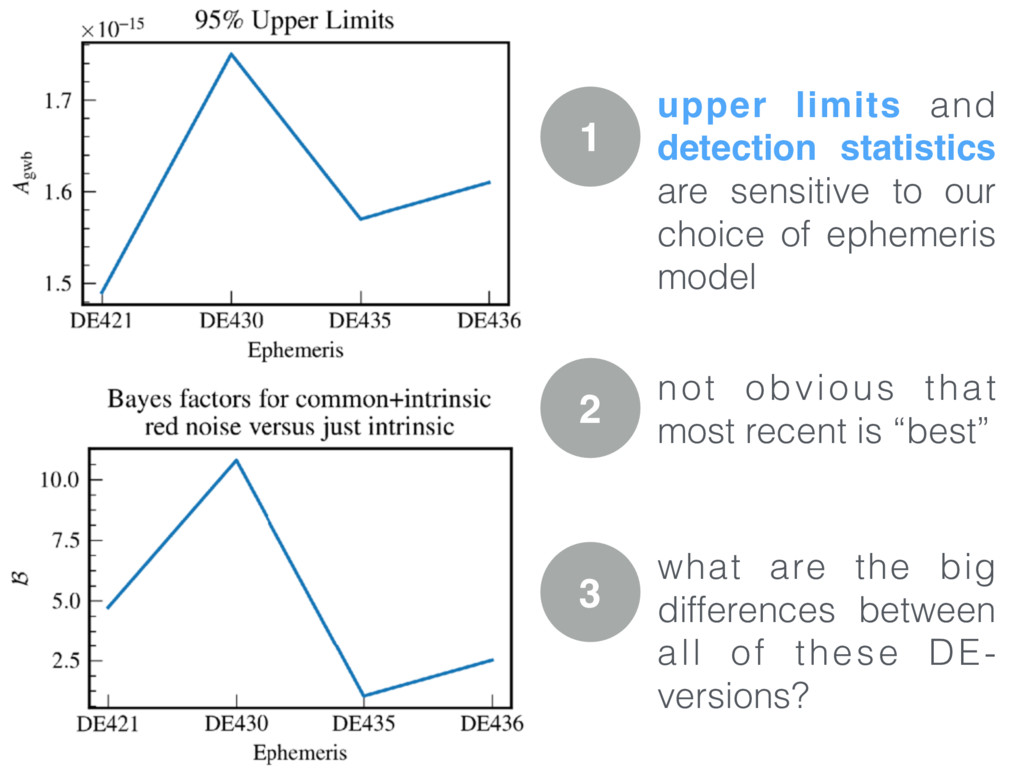
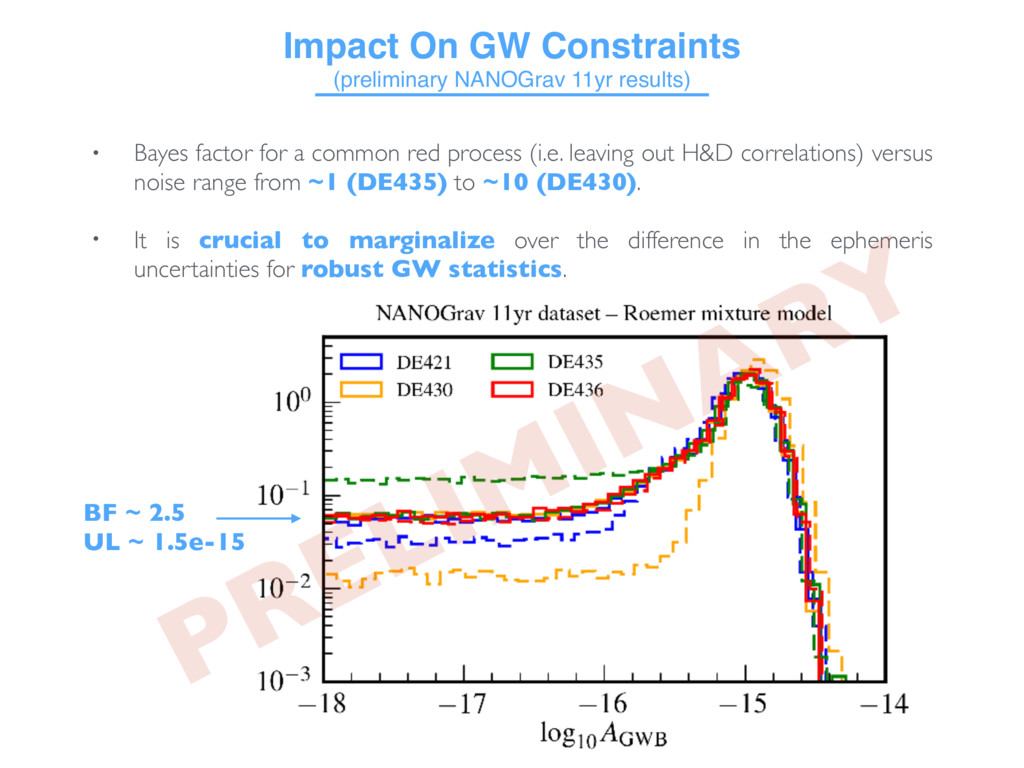
Bayes factor for a common red process (i.e. leaving out H&D correlations) versus noise range from ~1 (DE435) to ~10 (DE430). • It is crucial to marginalize over the difference in the ephemeris uncertainties for robust GW statistics. PRELIMINARY BF ~ 2.5 UL ~ 1.5e-15
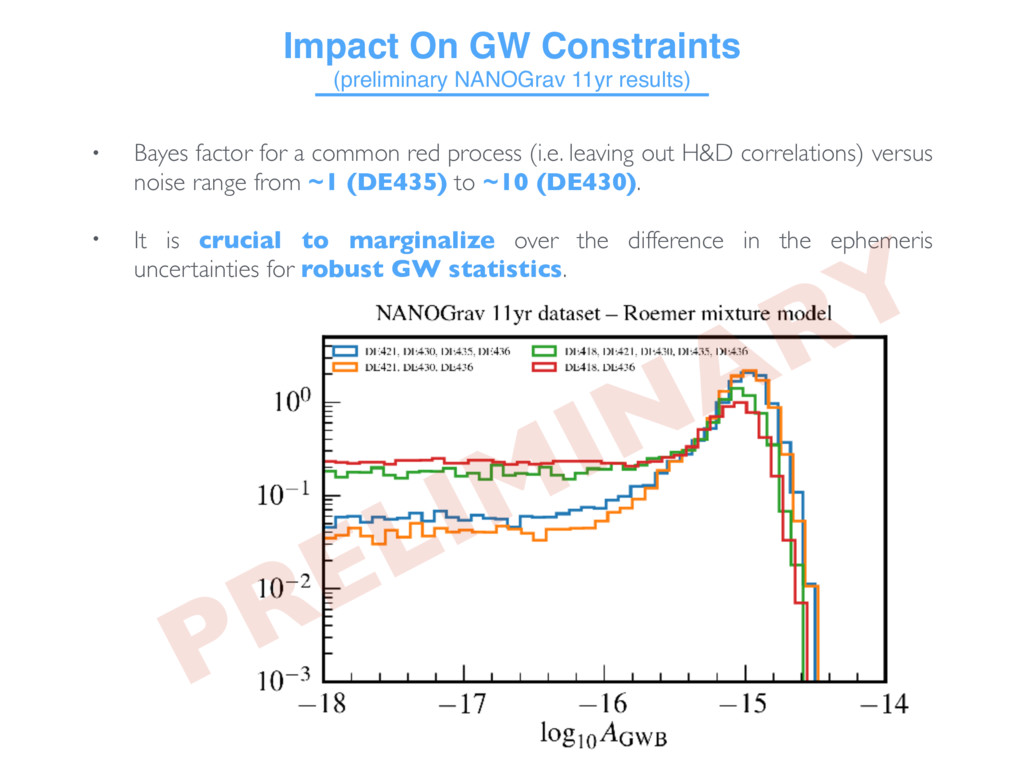
Bayes factor for a common red process (i.e. leaving out H&D correlations) versus noise range from ~1 (DE435) to ~10 (DE430). • It is crucial to marginalize over the difference in the ephemeris uncertainties for robust GW statistics. PRELIMINARY
GW upper limits and detection statistics our models attempt to perturb the Roemer delay and marginalize over differences our models (Roemer mixture, planet-mass perturbations, Roemer GP) can not yet “connect” all ephemerides JPL can provide partials to perturb away from DE436, or even provide many perturbed ephemerides to construct an empirical basis Summary & Outlook
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}