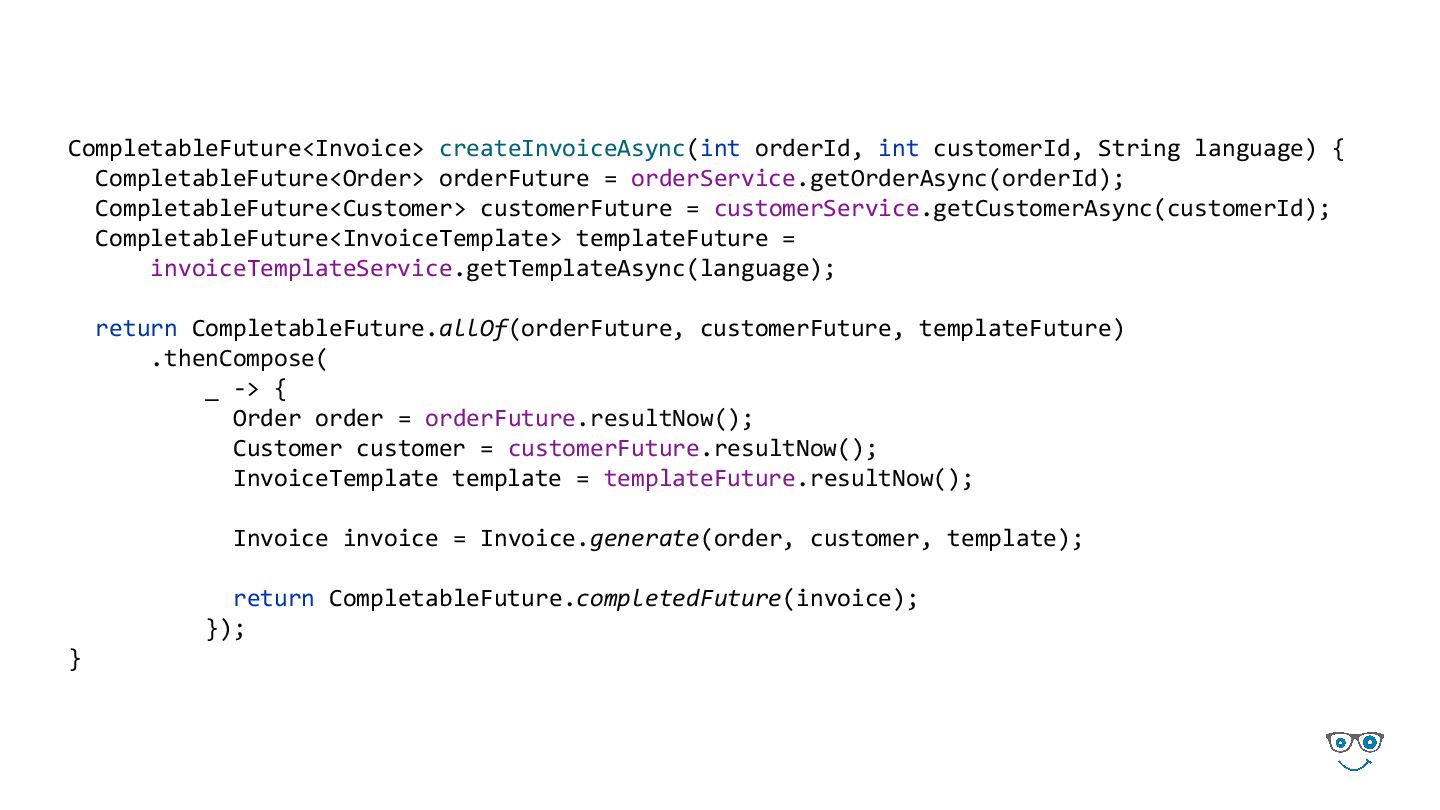
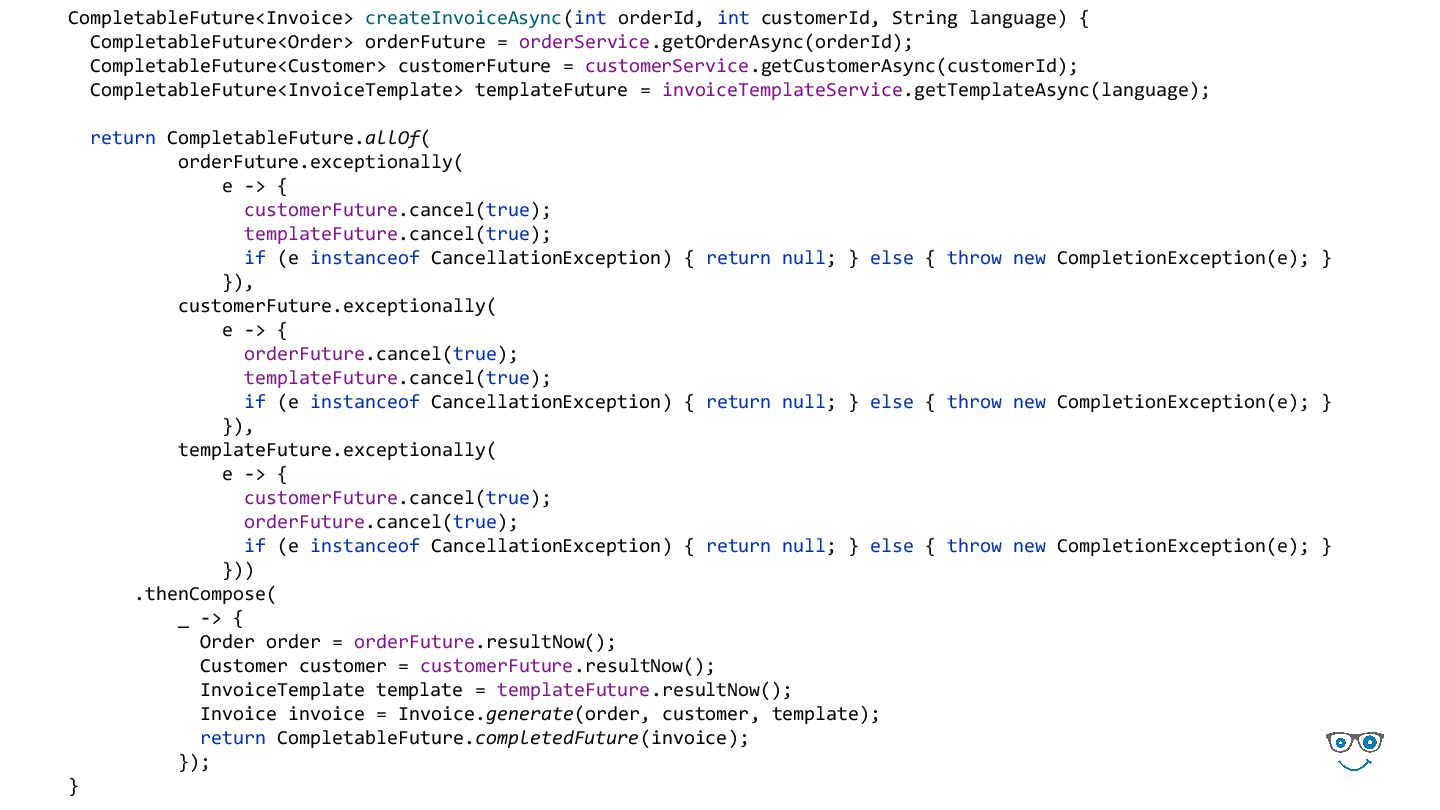
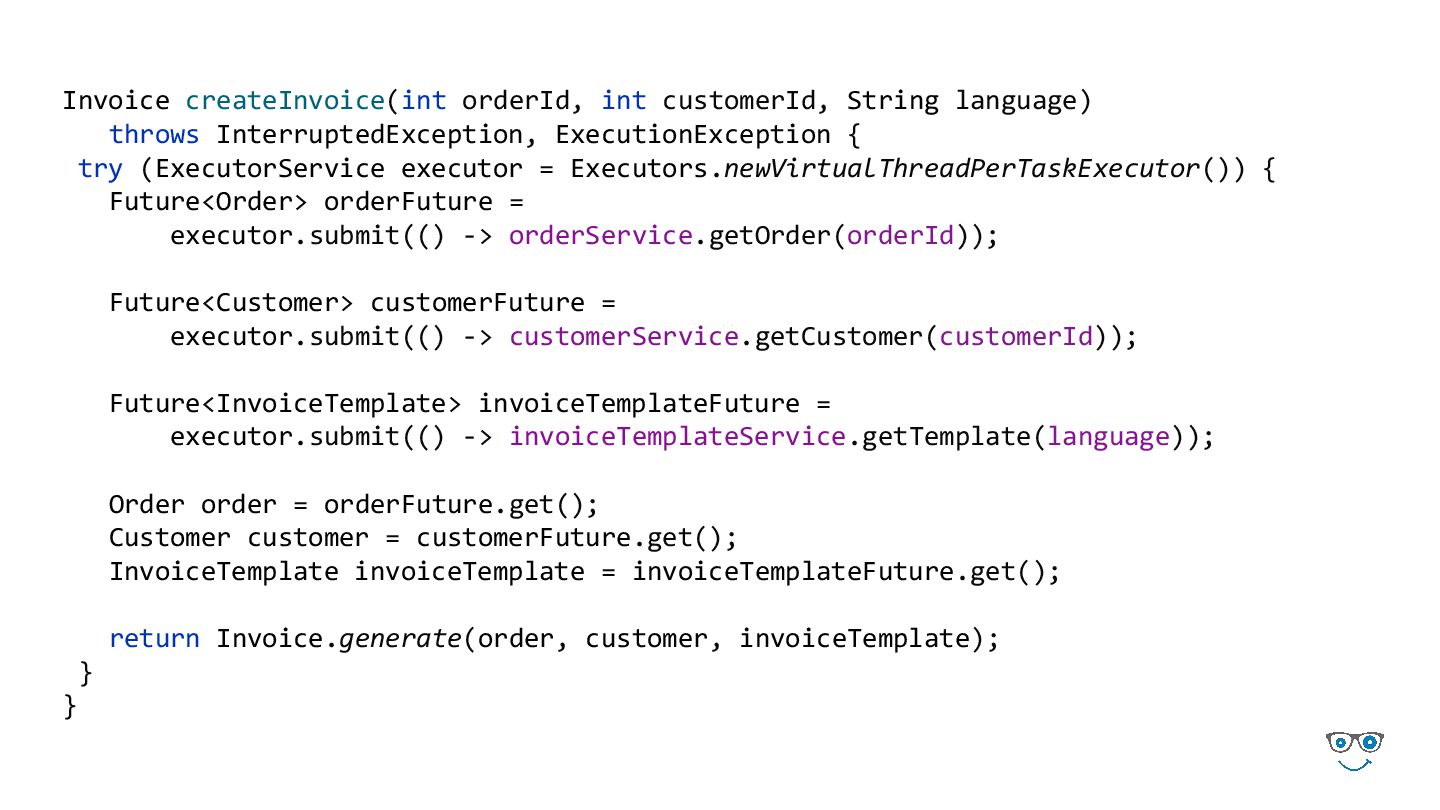
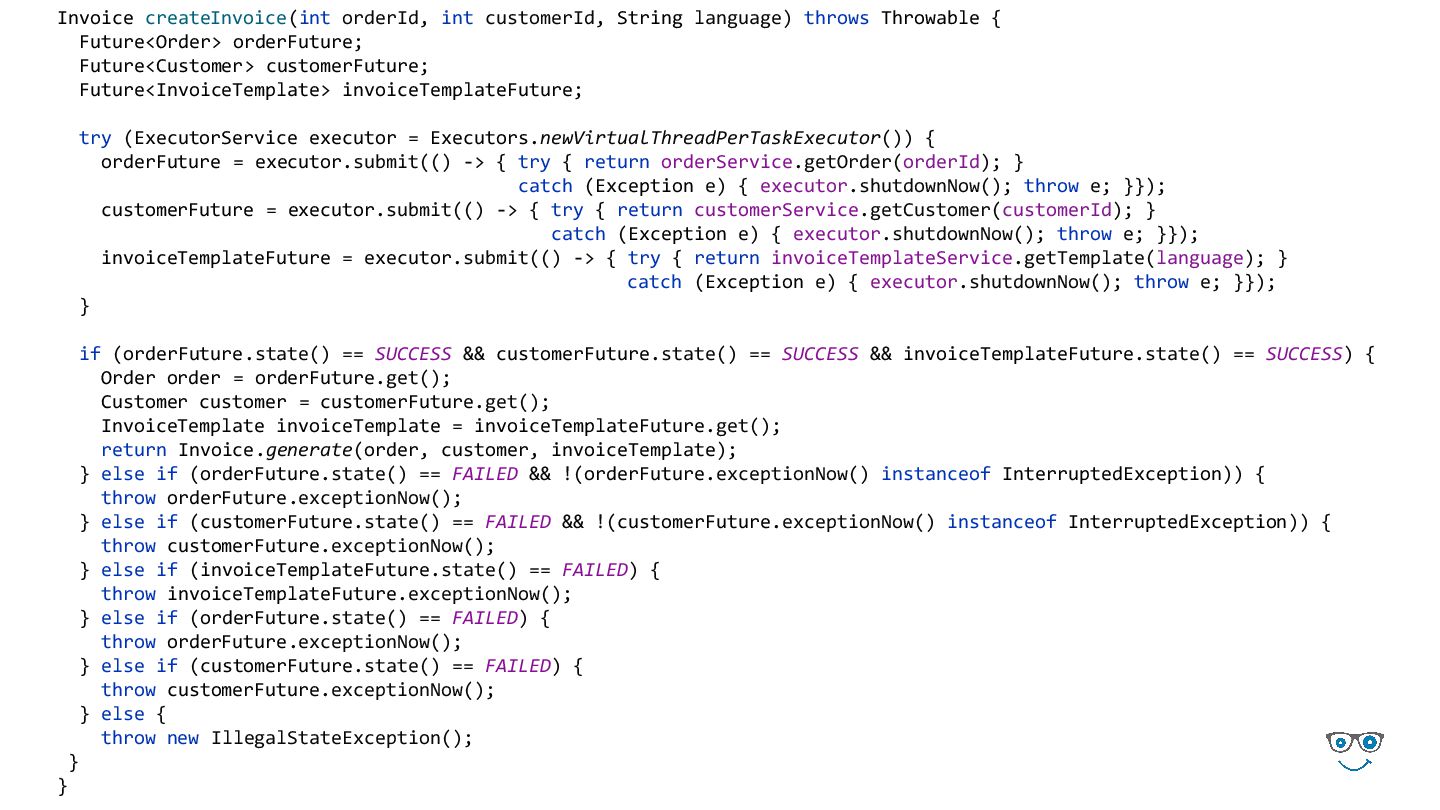
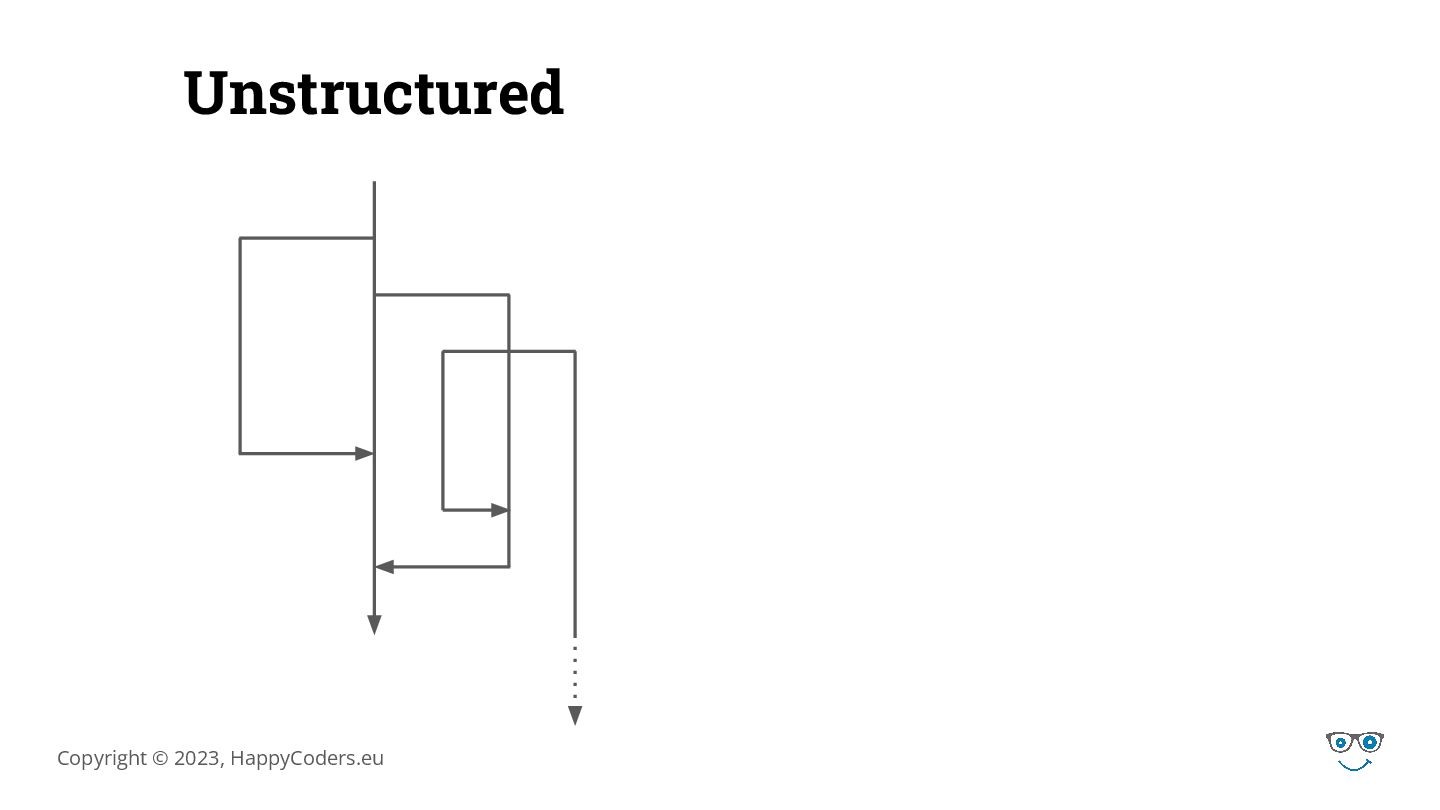
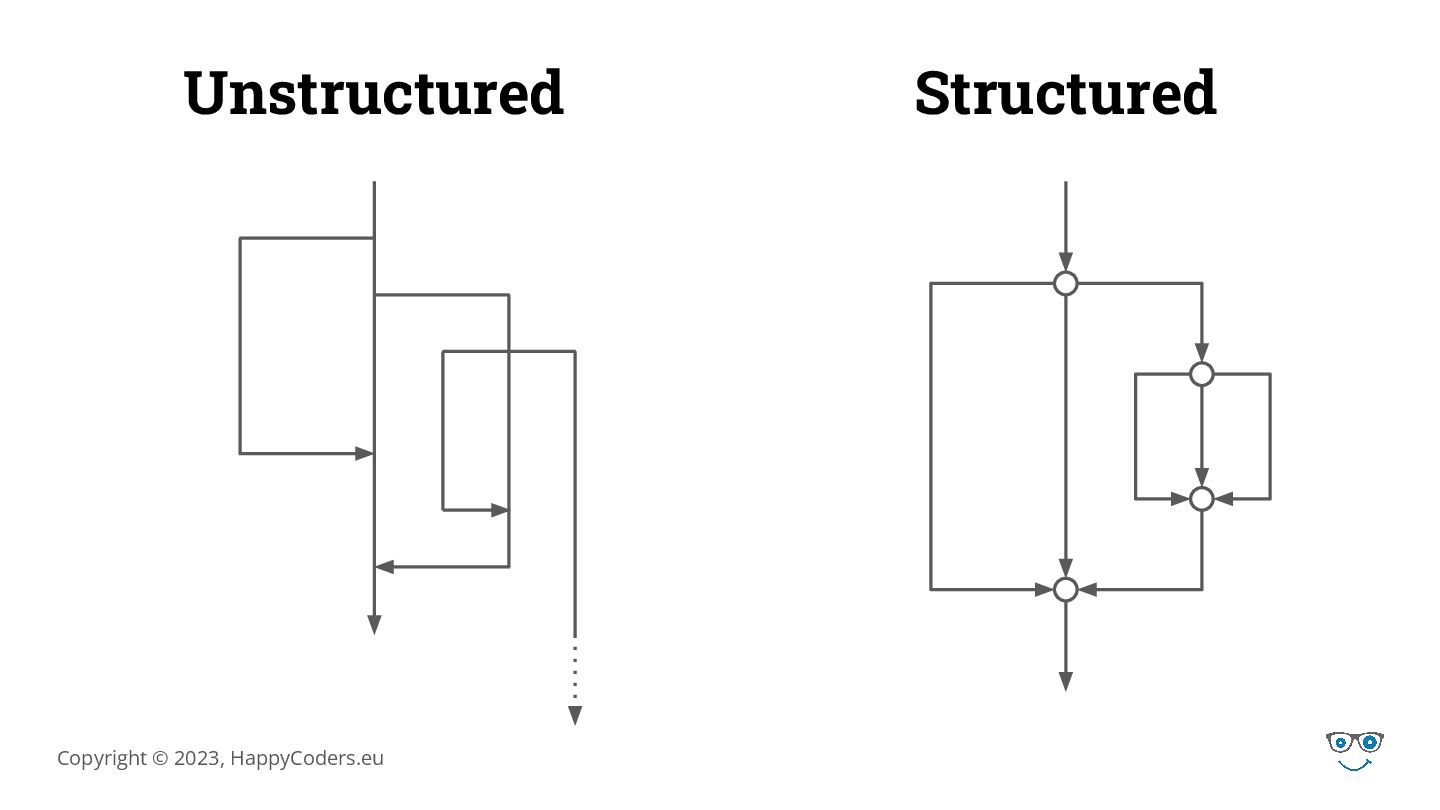
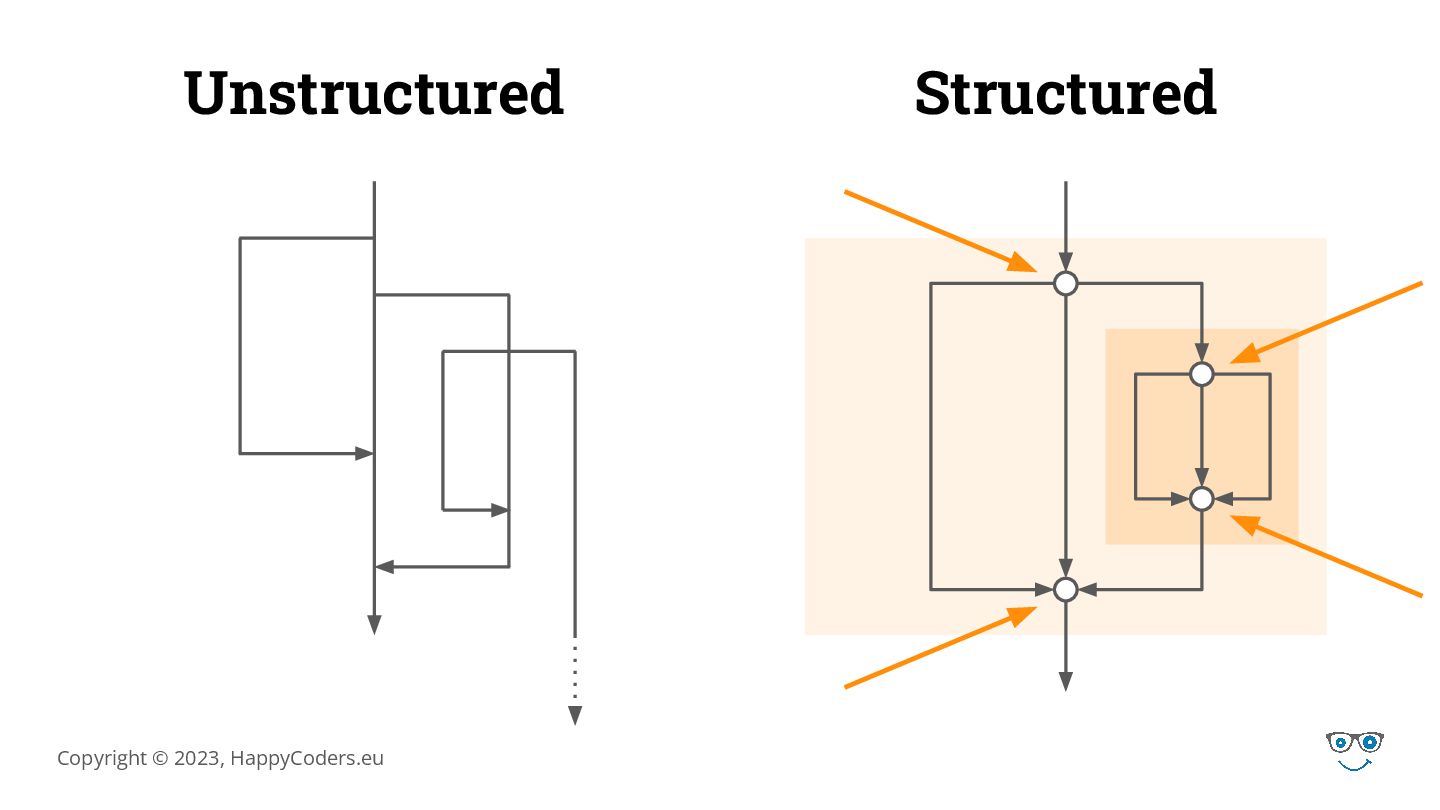
The coordination of concurrent, potentially blocking subtasks quickly reaches its limits with classic approaches such as CompletableFuture and ExecutorService. For example, canceling subtasks, whether after error situations or if we only need the result of a subtask, quickly leads to confusing interdependencies between business logic and state handling. We then speak of “unstructured concurrency”.
With StructuredTaskScope, we now have an API for “structured concurrency” that allows us to start and end subtasks together, merge the results, and, if necessary, cancel subtasks cleanly.
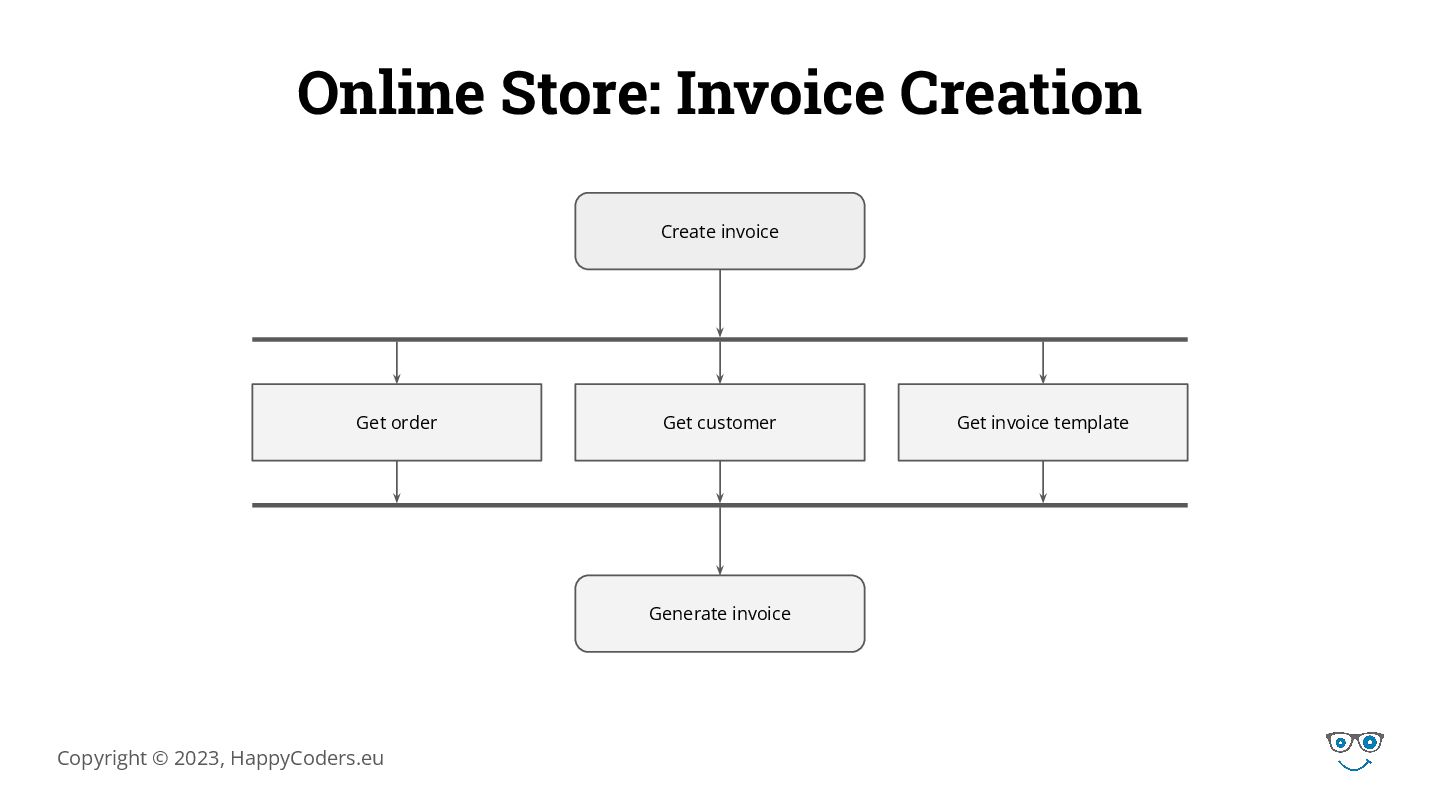
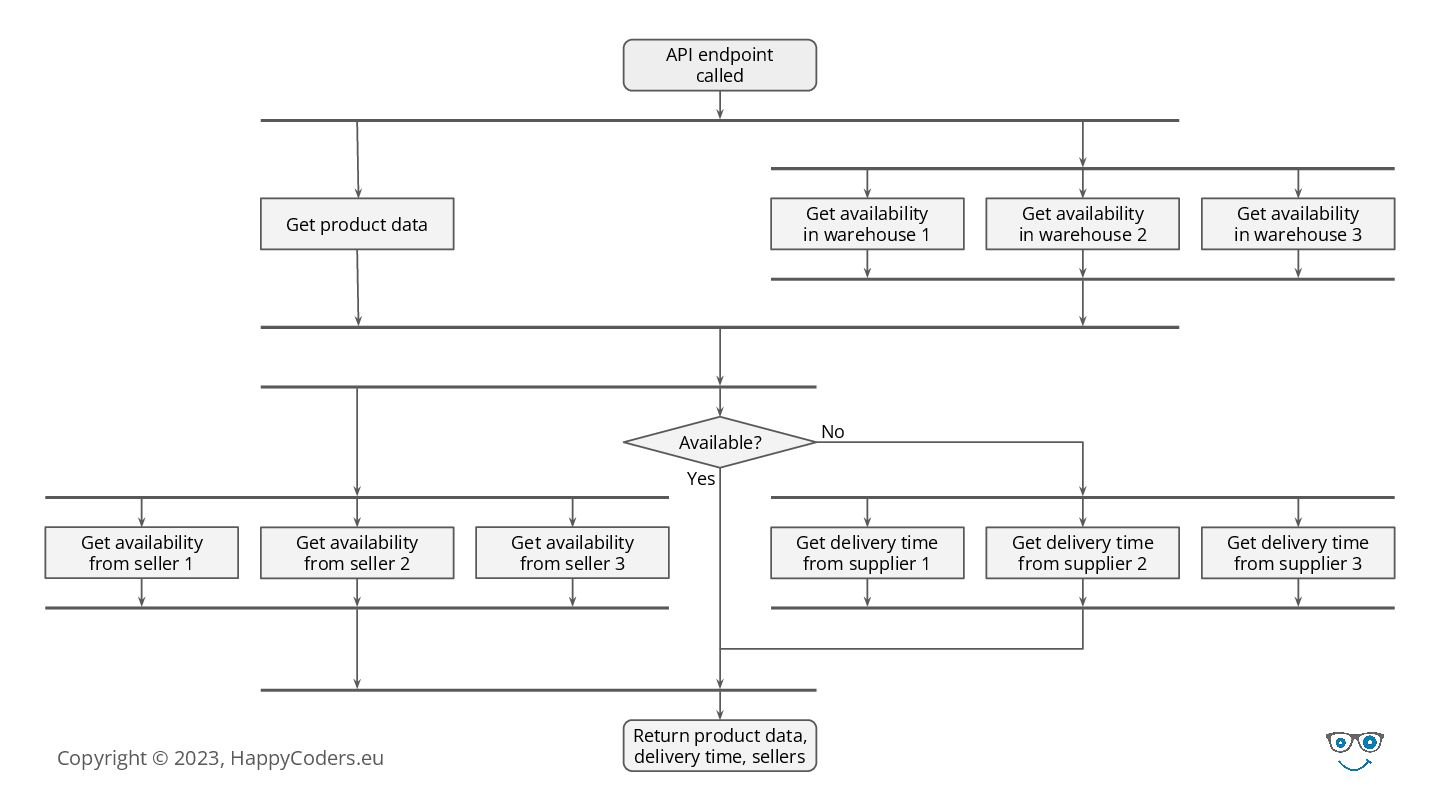
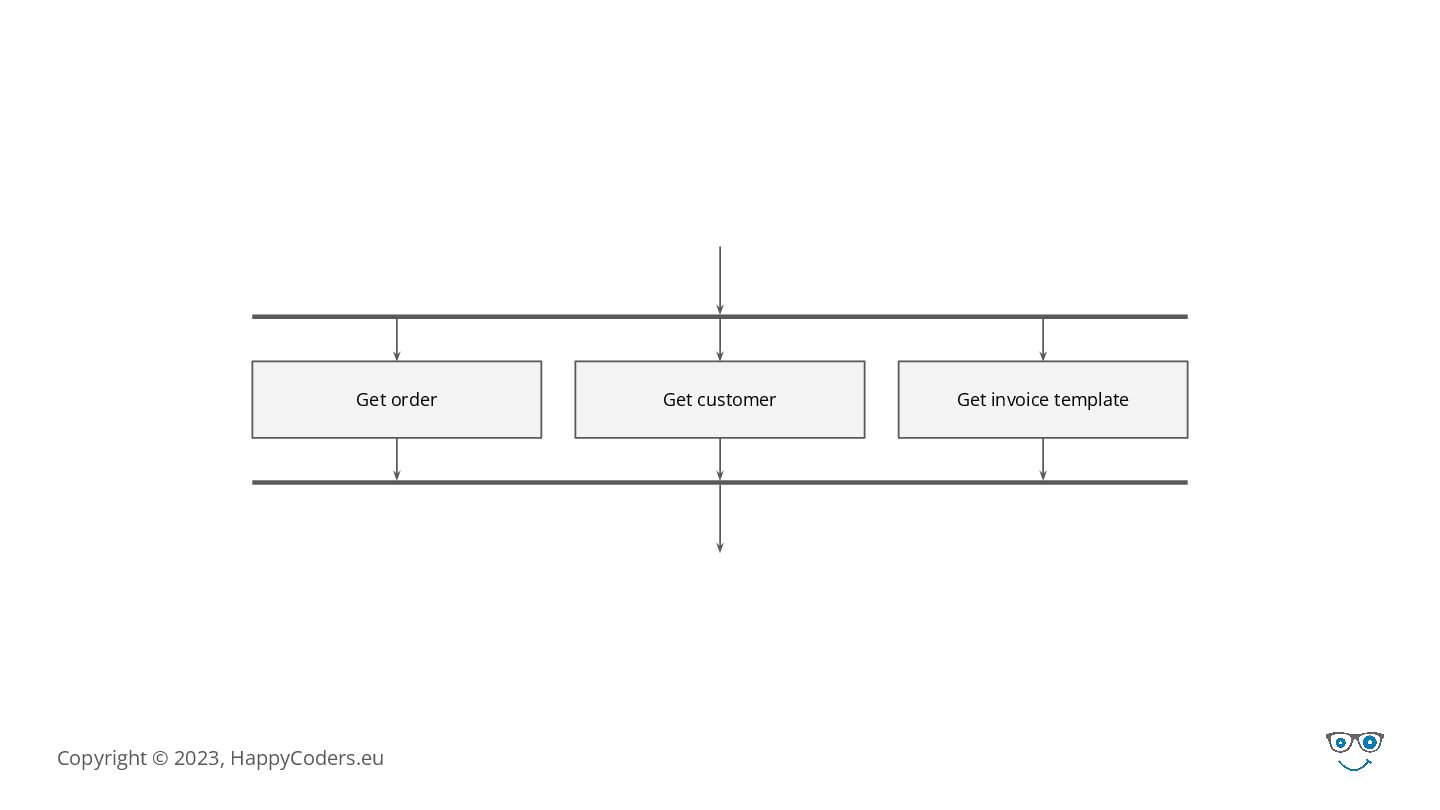
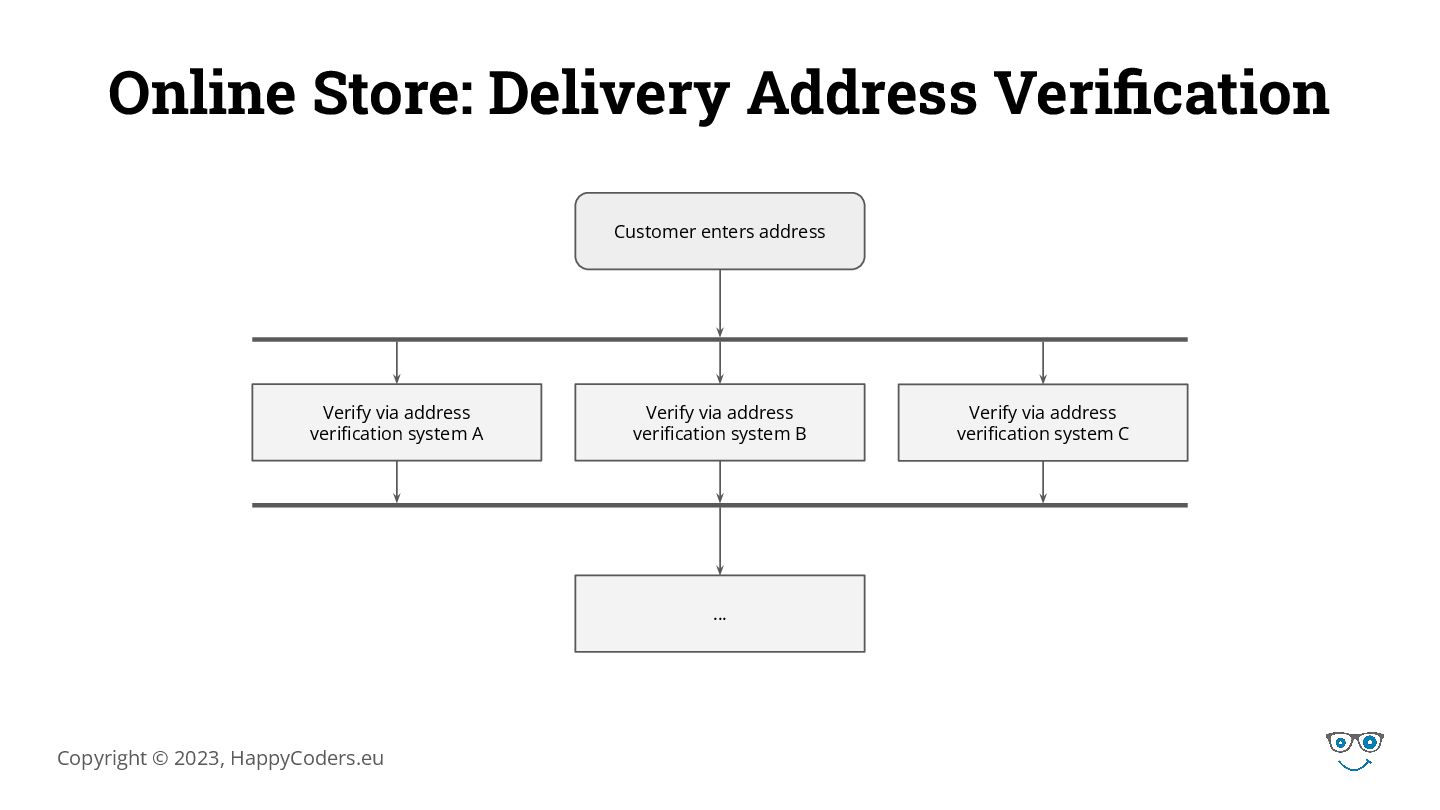
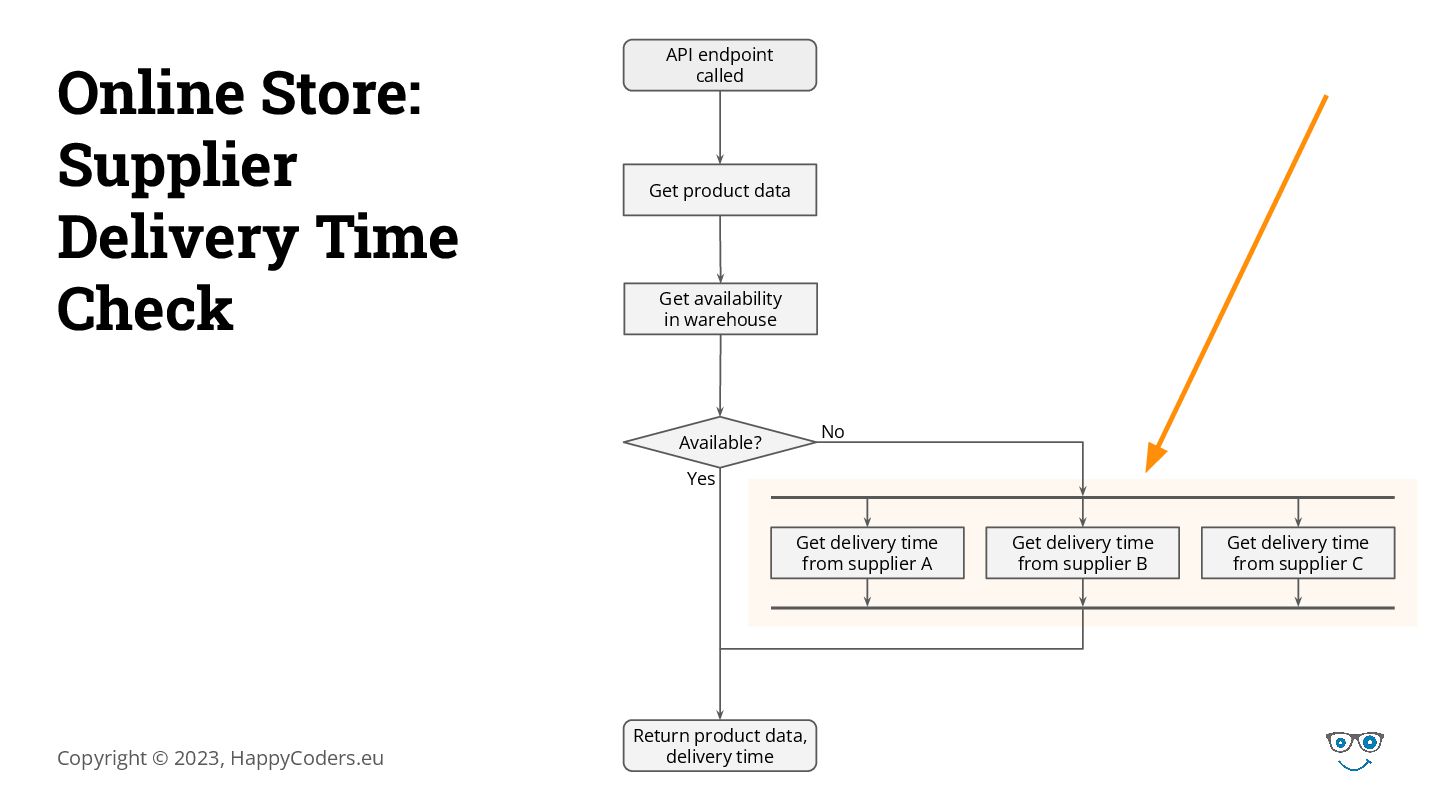
Using practical examples, I will show you that only a few easy-to-understand lines of code are needed for most use cases thanks to predefined strategies such as “all subtasks must be successful” and “abort if one subtask is successful.”
You can also handle individual requirements cleanly with StructuredTaskScope – I’ll show you an example of how to implement a strategy that waits for a certain number of partial results and then returns the best result.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}