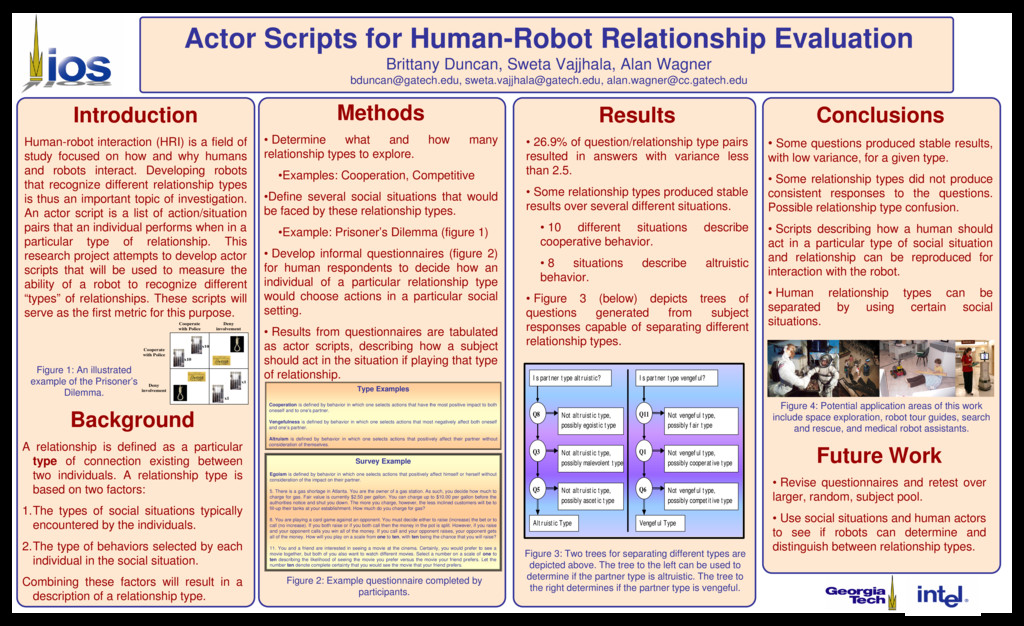
connection existing between two individuals. A relationship type is based on two factors: 1.The types of social situations typically encountered by the individuals. 2.The type of behaviors selected by each individual in the social situation. Combining these factors will result in a description of a relationship type. Methods • Determine what and how many relationship types to explore. •Examples: Cooperation, Competitive •Define several social situations that would be faced by these relationship types. •Example: Prisoner’s Dilemma (figure 1) • Develop informal questionnaires (figure 2) for human respondents to decide how an individual of a particular relationship type would choose actions in a particular social setting. • Results from questionnaires are tabulated as actor scripts, describing how a subject should act in the situation if playing that type of relationship. Results • 26.9% of question/relationship type pairs resulted in answers with variance less than 2.5. • Some relationship types produced stable results over several different situations. • 10 different situations describe cooperative behavior. • 8 situations describe altruistic behavior. • Figure 3 (below) depicts trees of questions generated from subject responses capable of separating different relationship types. Conclusions • Some questions produced stable results, with low variance, for a given type. • Some relationship types did not produce consistent responses to the questions. Possible relationship type confusion. • Scripts describing how a human should act in a particular type of social situation and relationship can be reproduced for interaction with the robot. • Human relationship types can be separated by using certain social situations. Future Work • Revise questionnaires and retest over larger, random, subject pool. • Use social situations and human actors to see if robots can determine and distinguish between relationship types. Actor Scripts for Human-Robot Relationship Evaluation Brittany Duncan, Sweta Vajjhala, Alan Wagner
[email protected],
[email protected],
[email protected] Figure 3: Two trees for separating different types are depicted above. The tree to the left can be used to determine if the partner type is altruistic. The tree to the right determines if the partner type is vengeful. Figure 1: An illustrated example of the Prisoner’s Dilemma. Cooperate with Police Cooperate with Police Deny involvement Deny involvement x1 x1 x10 x10 Survey Example Egoism is defined by behavior in which one selects actions that positively affect himself or herself without consideration of the impact on their partner. 5. There is a gas shortage in Atlanta. You are the owner of a gas station. As such, you decide how much to charge for gas. Fair value is currently $2.50 per gallon. You can charge up to $10.00 per gallon before the authorities notice and shut you down. The more you charge, however, the less inclined customers will be to fill-up their tanks at your establishment. How much do you charge for gas? 8. You are playing a card game against an opponent. You must decide either to raise (increase) the bet or to call (no increase). If you both raise or if you both call then the money in the pot is split. However, if you raise and your opponent calls you win all of the money. If you call and your opponent raises, your opponent gets all of the money. How will you play on a scale from one to ten, with ten being the chance that you will raise? 11. You and a friend are interested in seeing a movie at the cinema. Certainly, you would prefer to see a movie together, but both of you also want to watch different movies. Select a number on a scale of one to ten describing the likelihood of seeing the movie you prefer versus the movie your friend prefers. Let the number ten denote complete certainty that you would see the movie that your friend prefers. Type Examples Cooperation is defined by behavior in which one selects actions that have the most positive impact to both oneself and to one’s partner. Vengefulness is defined by behavior in which one selects actions that most negatively affect both oneself and one’s partner. Altruism is defined by behavior in which one selects actions that positively affect their partner without consideration of themselves. Q8 Q3 Q5 Not altruistic type, possibly egoistic type Altruistic Type Q11 Q1 Q6 Vengeful Type Is partner type altruistic? Is partner type vengeful? Not vengeful type, possibly fair type Not vengeful type, possibly cooperative type Not vengeful type, possibly competitive type Not altruistic type, possibly malevolent type Not altruistic type, possibly ascetic type Figure 2: Example questionnaire completed by participants. Figure 4: Potential application areas of this work include space exploration, robot tour guides, search and rescue, and medical robot assistants. Introduction Human-robot interaction (HRI) is a field of study focused on how and why humans and robots interact. Developing robots that recognize different relationship types is thus an important topic of investigation. An actor script is a list of action/situation pairs that an individual performs when in a particular type of relationship. This research project attempts to develop actor scripts that will be used to measure the ability of a robot to recognize different “types” of relationships. These scripts will serve as the first metric for this purpose.
{kind=link}