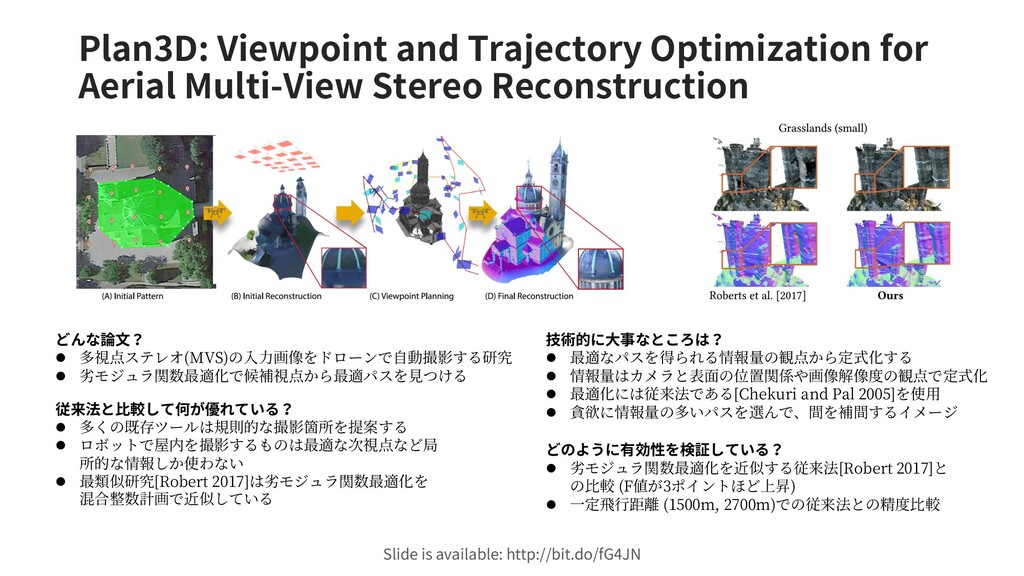
どんな論⽂? l 多視点ステレオ(MVS)の⼊⼒画像をドローンで⾃動撮影する研究 l 劣モジュラ関数最適化で候補視点から最適パスを⾒つける 従来法と⽐較して何が優れている? l 多くの既存ツールは規則的な撮影箇所を提案する l ロボットで屋内を撮影するものは最適な次視点など局 所的な情報しか使わない l 最類似研究[Robert 2017]は劣モジュラ関数最適化を 混合整数計画で近似している 技術的に⼤事なところは? l 最適なパスを得られる情報量の観点から定式化する l 情報量はカメラと表⾯の位置関係や画像解像度の観点で定式化 l 最適化には従来法である[Chekuri and Pal 2005]を使⽤ l 貪欲に情報量の多いパスを選んで、間を補間するイメージ どのように有効性を検証している? l 劣モジュラ関数最適化を近似する従来法[Robert 2017]と の⽐較 (F値が3ポイントほど上昇) l ⼀定⾶⾏距離 (1500m, 2700m)での従来法との精度⽐較 Slide is available: http://bit.do/fG4JN
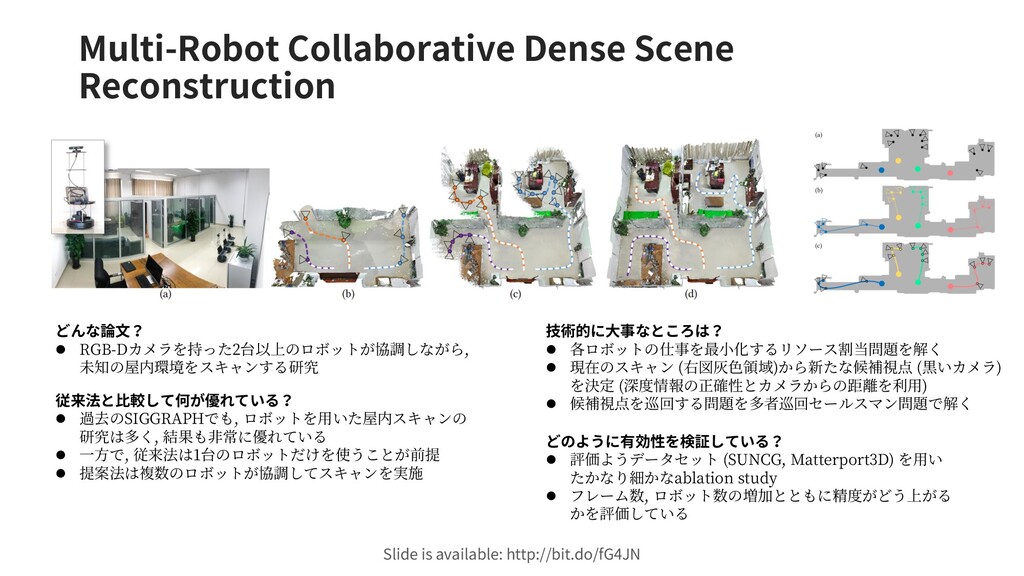
l 過去のSIGGRAPHでも, ロボットを⽤いた屋内スキャンの 研究は多く, 結果も⾮常に優れている l ⼀⽅で, 従来法は1台のロボットだけを使うことが前提 l 提案法は複数のロボットが協調してスキャンを実施 技術的に⼤事なところは? l 各ロボットの仕事を最⼩化するリソース割当問題を解く l 現在のスキャン (右図灰⾊領域)から新たな候補視点 (黒いカメラ) を決定 (深度情報の正確性とカメラからの距離を利⽤) l 候補視点を巡回する問題を多者巡回セールスマン問題で解く どのように有効性を検証している? l 評価ようデータセット (SUNCG, Matterport3D) を⽤い たかなり細かなablation study l フレーム数, ロボット数の増加とともに精度がどう上がる かを評価している Slide is available: http://bit.do/fG4JN
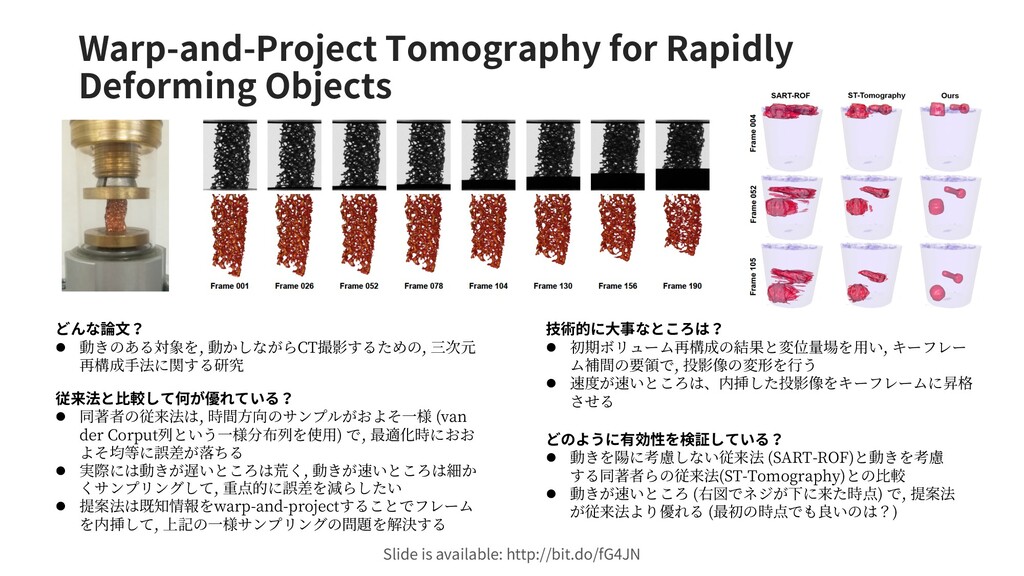
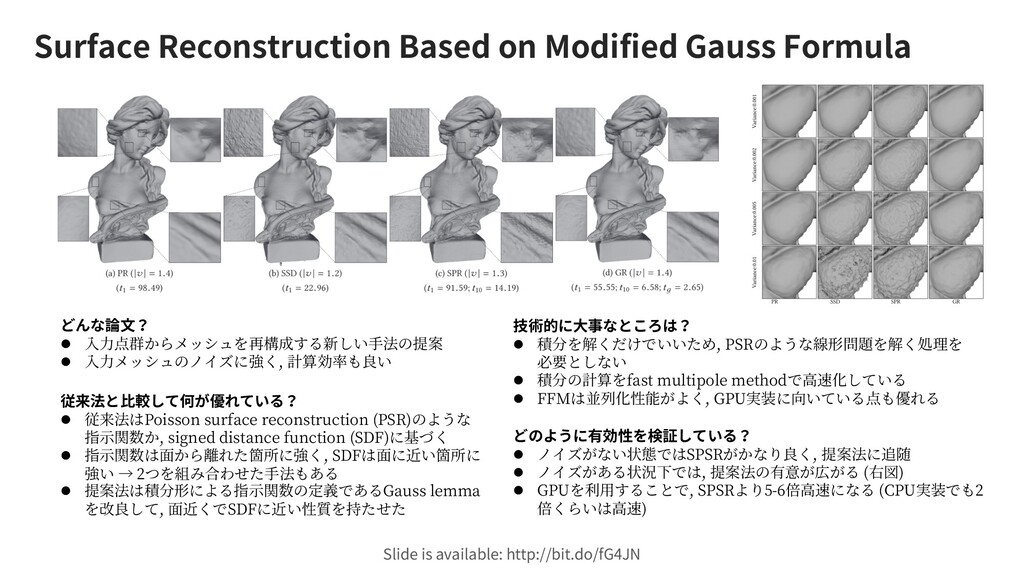
l ⼊⼒メッシュのノイズに強く, 計算効率も良い 従来法と⽐較して何が優れている? l 従来法はPoisson surface reconstruction (PSR)のような 指⽰関数か, signed distance function (SDF)に基づく l 指⽰関数は⾯から離れた箇所に強く, SDFは⾯に近い箇所に 強い → 2つを組み合わせた⼿法もある l 提案法は積分形による指⽰関数の定義であるGauss lemma を改良して, ⾯近くでSDFに近い性質を持たせた 技術的に⼤事なところは? l 積分を解くだけでいいため, PSRのような線形問題を解く処理を 必要としない l 積分の計算をfast multipole methodで⾼速化している l FFMは並列化性能がよく, GPU実装に向いている点も優れる どのように有効性を検証している? l ノイズがない状態ではSPSRがかなり良く, 提案法に追随 l ノイズがある状況下では, 提案法の有意が広がる (右図) l GPUを利⽤することで, SPSRより5-6倍⾼速になる (CPU実装でも2 倍くらいは⾼速) Slide is available: http://bit.do/fG4JN
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}