Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
第64回コンピュータビジョン勉強会@関東(後編)
Search
TSUKAMOTO Kenji
August 20, 2025
Technology
340
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
第64回コンピュータビジョン勉強会@関東(後編)
TSUKAMOTO Kenji
August 20, 2025
More Decks by TSUKAMOTO Kenji
See All by TSUKAMOTO Kenji
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
130
第65回コンピュータビジョン勉強会
tsukamotokenji
0
250
DynIBaR (第60回CV勉強会@関東)
tsukamotokenji
0
270
DeepSFM: Structure from Motion Via Deep Bundle Adjustment
tsukamotokenji
2
650
第三回 全日本コンピュータビジョン勉強会(後編)
tsukamotokenji
1
1k
Other Decks in Technology
See All in Technology
AIと共生する開発者プラットフォーム:バクラクのモノレポ×マイクロサービス基盤
sakajunquality
2
3.6k
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
360
しくみを学んで使いこなそう GitHub Copilot app
torumakabe
2
250
オブザーバビリティ、本当に活用できてる? 〜API連携×生成AIで成熟度を自動評価〜
dmmsre
1
3.2k
LLM/Agent評価:トップ営業の発言を「正解」にする 〜暗黙的正解による評価を営業資産に変える〜
takkuhiro
1
220
CIで使うClaude
iwatatomoya
0
270
「最後に責任を取るのはチーム」— 人間のPRレビューを最小化してアップデートしたメンタルモデル
jnishime_dresscode
0
710
Alphaモジュール使っていいのかい!?いけないのかい!?どっちなんだいっ!?
watany
1
190
公式ドキュメントの歩き方etc
coco_se
0
110
実装だけじゃない! CCA-F取得エンジニアが教えるClaude Code開発プロセス活用術
diggymo
2
740
[2026-07-15] AI Ready なはずだったアーキテクチャと、見えてきた課題・次に目指す状態
wxyzzz
8
3.7k
インフラ寄りSREでも 開発に踏み出せる〜境界を越えてユーザー体験に向き合いたい〜
sansantech
PRO
2
3.9k
Featured
See All Featured
Unsuck your backbone
ammeep
672
58k
Joys of Absence: A Defence of Solitary Play
codingconduct
1
410
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.9k
The Director’s Chair: Orchestrating AI for Truly Effective Learning
tmiket
1
210
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
Unlocking the hidden potential of vector embeddings in international SEO
frankvandijk
0
870
How to Ace a Technical Interview
jacobian
281
24k
Skip the Path - Find Your Career Trail
mkilby
1
170
Code Review Best Practice
trishagee
74
20k
Claude Code のすすめ
schroneko
67
230k
A Modern Web Designer's Workflow
chriscoyier
698
190k
JAMstack: Web Apps at Ludicrous Speed - All Things Open 2022
reverentgeek
1
490
Transcript
第64回コンピュータビジョン勉強会@関東(後編) 2025/08/24
発表論文 ロボットが空間理解するためのタスクに対するデータセットの提案 • Github
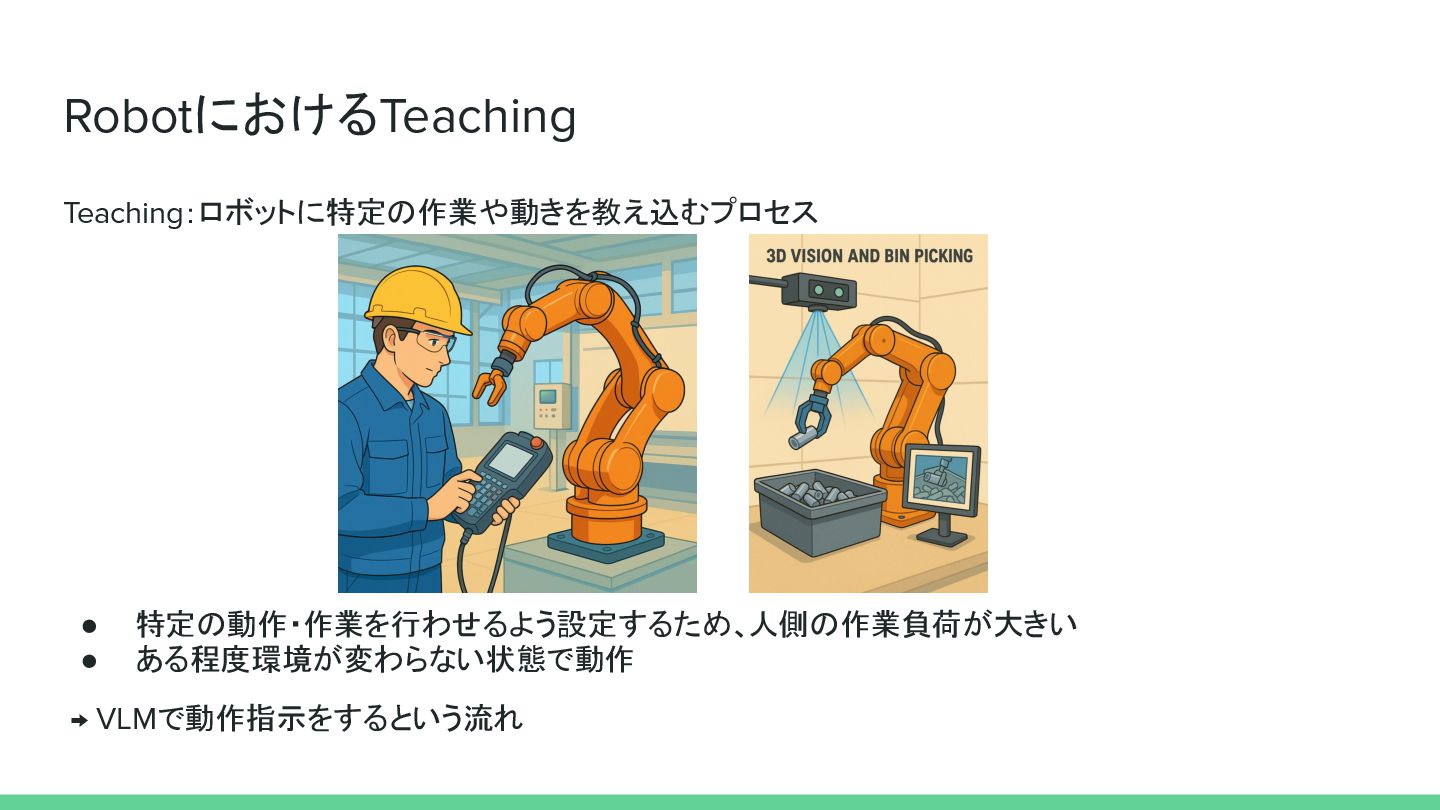
RobotにおけるTeaching Teaching:ロボットに特定の作業や動きを教え込むプロセス • 特定の動作・作業を行わせるよう設定するため、 人側の作業負荷が大きい • ある程度環境が変わらない状態で動作 → VLMで動作指示をするという流れ
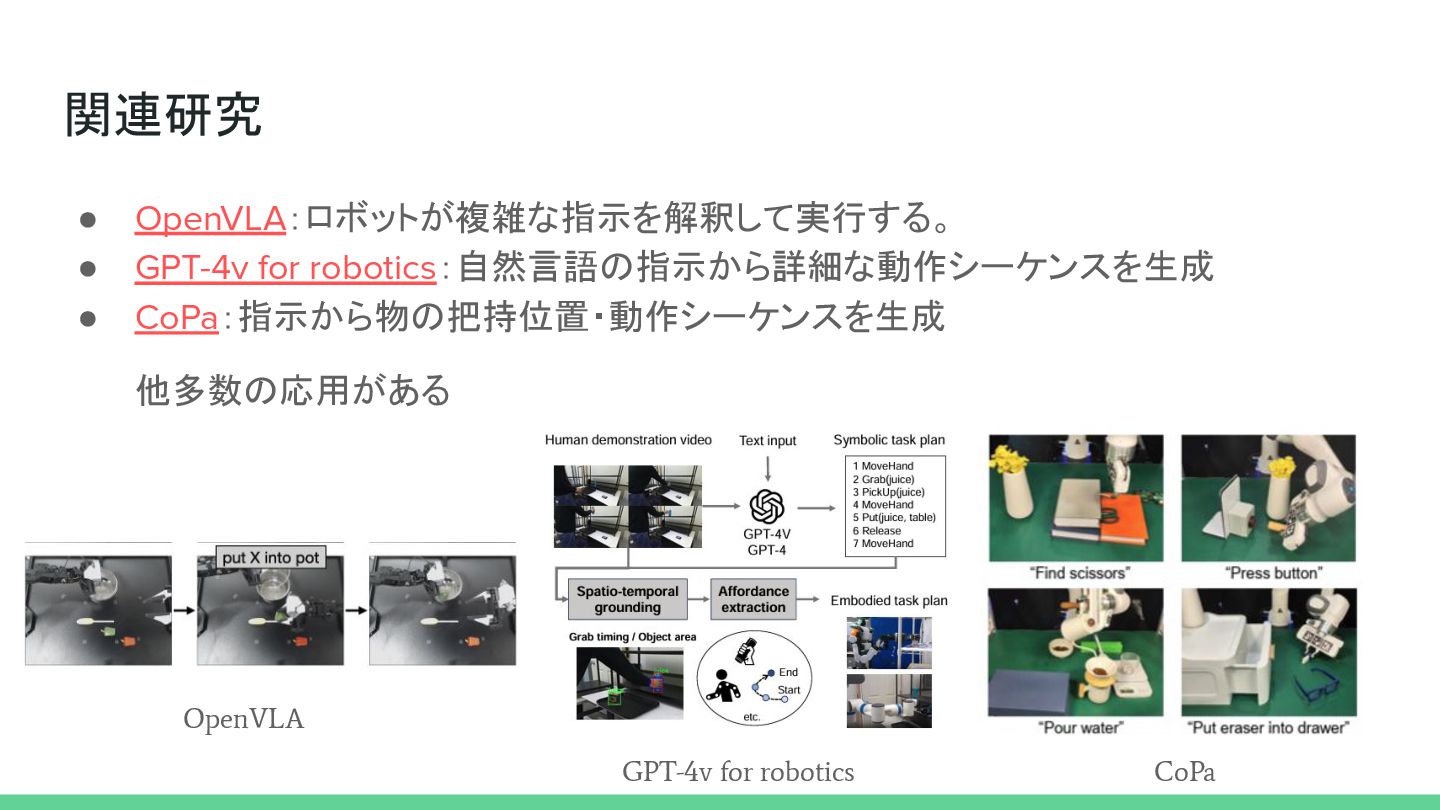
関連研究 • OpenVLA:ロボットが複雑な指示を解釈して実行する。 • GPT-4v for robotics:自然言語の指示から詳細な動作シーケンスを生成 • CoPa:指示から物の把持位置・動作シーケンスを生成 他多数の応用がある
OpenVLA GPT-4v for robotics CoPa
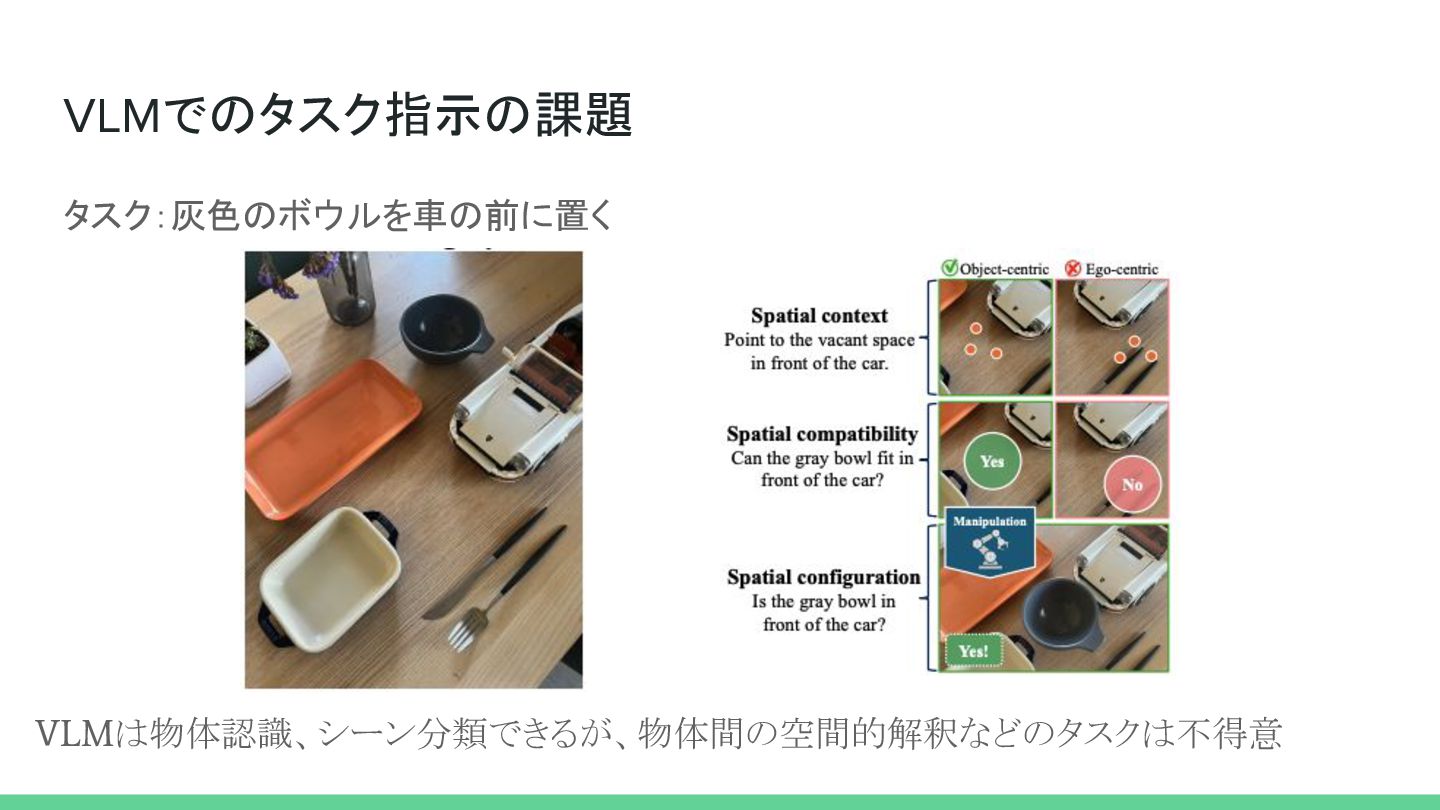
VLMでのタスク指示の課題 タスク:灰色のボウルを車の前に置く VLMは物体認識、シーン分類できるが、物体間の空間的解釈などのタスクは不得意
位置関係の解釈に関する取り組み • SpatialVLMやSpatialRGPT ◦ 物体間の距離や空間関係に関する質問に答えられよう VLMを学習して空間理解の向上 ▪ ネット上の画像・データセットで学習、実空間での利用に差異がある • RoboPointやMolmoなどのPointing
Model ◦ VLMsをシーン内の物体の位置や空きスペースを特定する接地された 2次元座標を生成するように 訓練 ▪ 現実世界の制約の理解に課題:ボウルは車の前におけるサイズなのか? • 位置関係を課題にしたデータセットは現状ない ◦ 汎用的な画像、少ない 3Dスキャンデータ ◦ アノテーション(Question・Answer)が自由形式 ▪ 空間関係は言及されていない
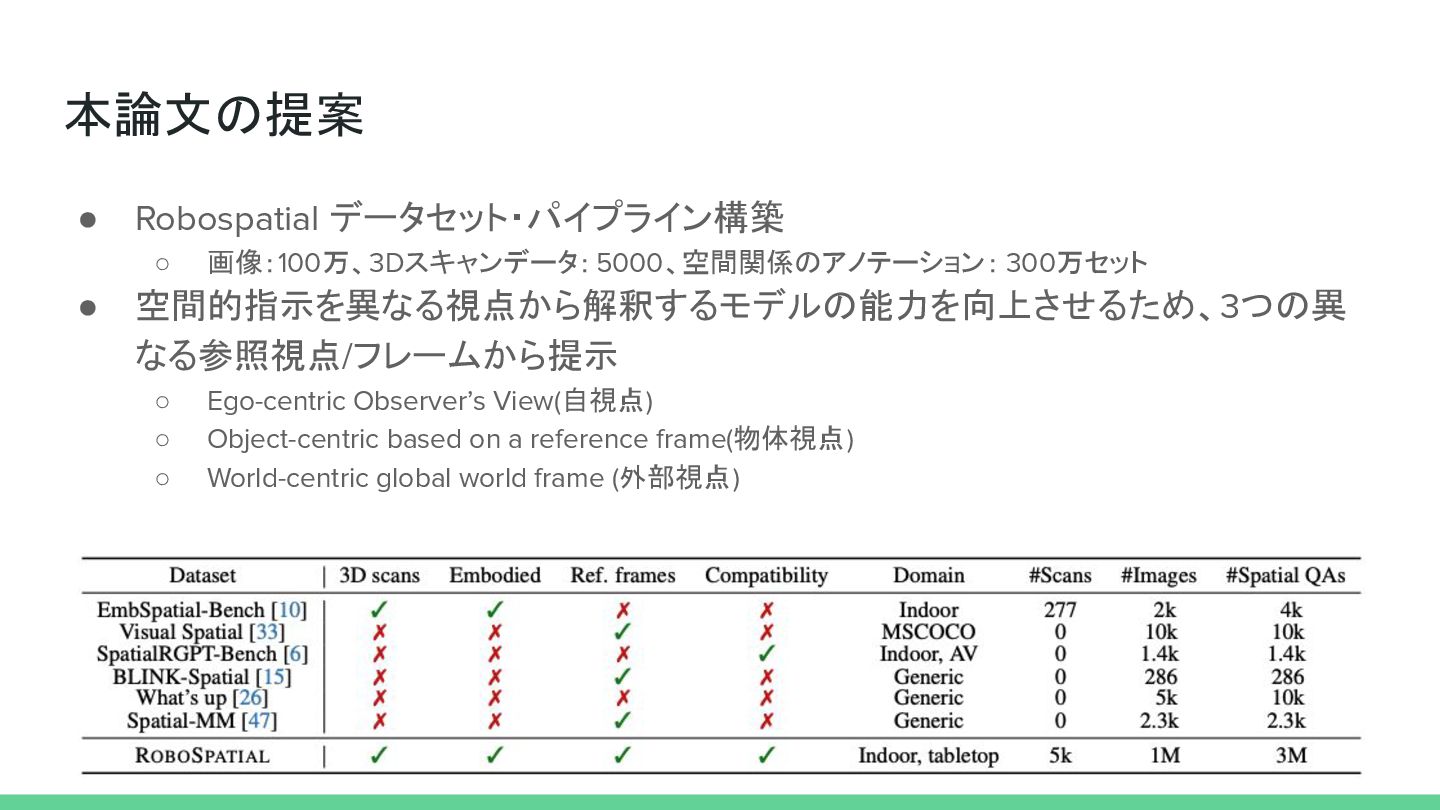
本論文の提案 • Robospatial データセット・パイプライン構築 ◦ 画像:100万、3Dスキャンデータ:5000、空間関係のアノテーション: 300万セット • 空間的指示を異なる視点から解釈するモデルの能力を向上させるため、3つの異 なる参照視点/フレームから提示
◦ Ego-centric Observer’s View(自視点) ◦ Object-centric based on a reference frame(物体視点) ◦ World-centric global world frame (外部視点)
Robospatial Dataset • Context:物体とその周囲の空間との関係を評価 (経路計画や障害物回避 ) • Compatibility:空間内で物体が衝突せずに共存・相互作用できるか(組み立て、操作安全性) • Configuration:ロボットが物体の相対的な位置関係を理解・解釈、
◦ 複雑な環境におけるナビゲーション、操作、相互作用の制御
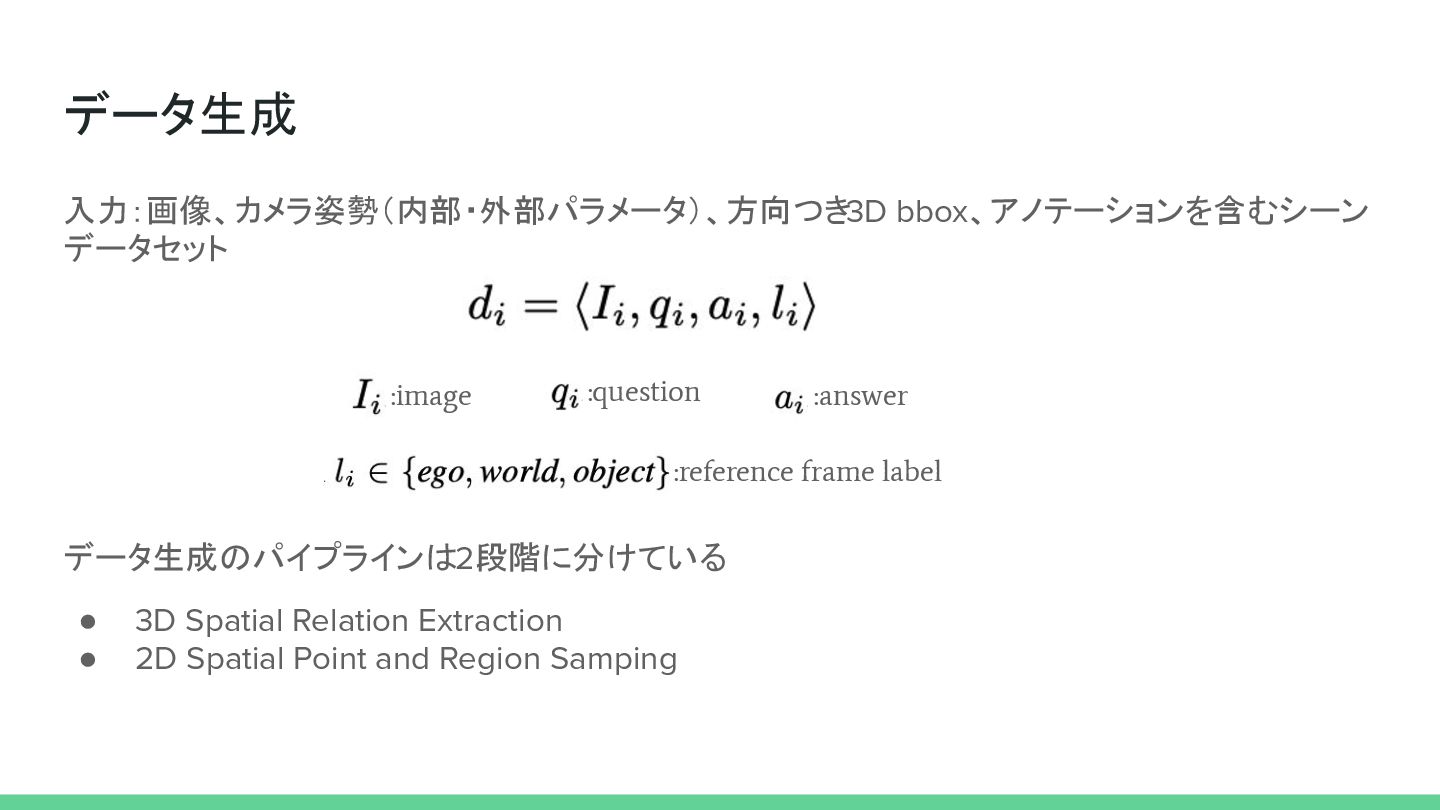
データ生成 入力:画像、カメラ姿勢(内部・外部パラメータ)、方向つき 3D bbox、アノテーションを含むシーン データセット データ生成のパイプラインは2段階に分けている • 3D Spatial Relation
Extraction • 2D Spatial Point and Region Samping :reference frame label :answer :question :image
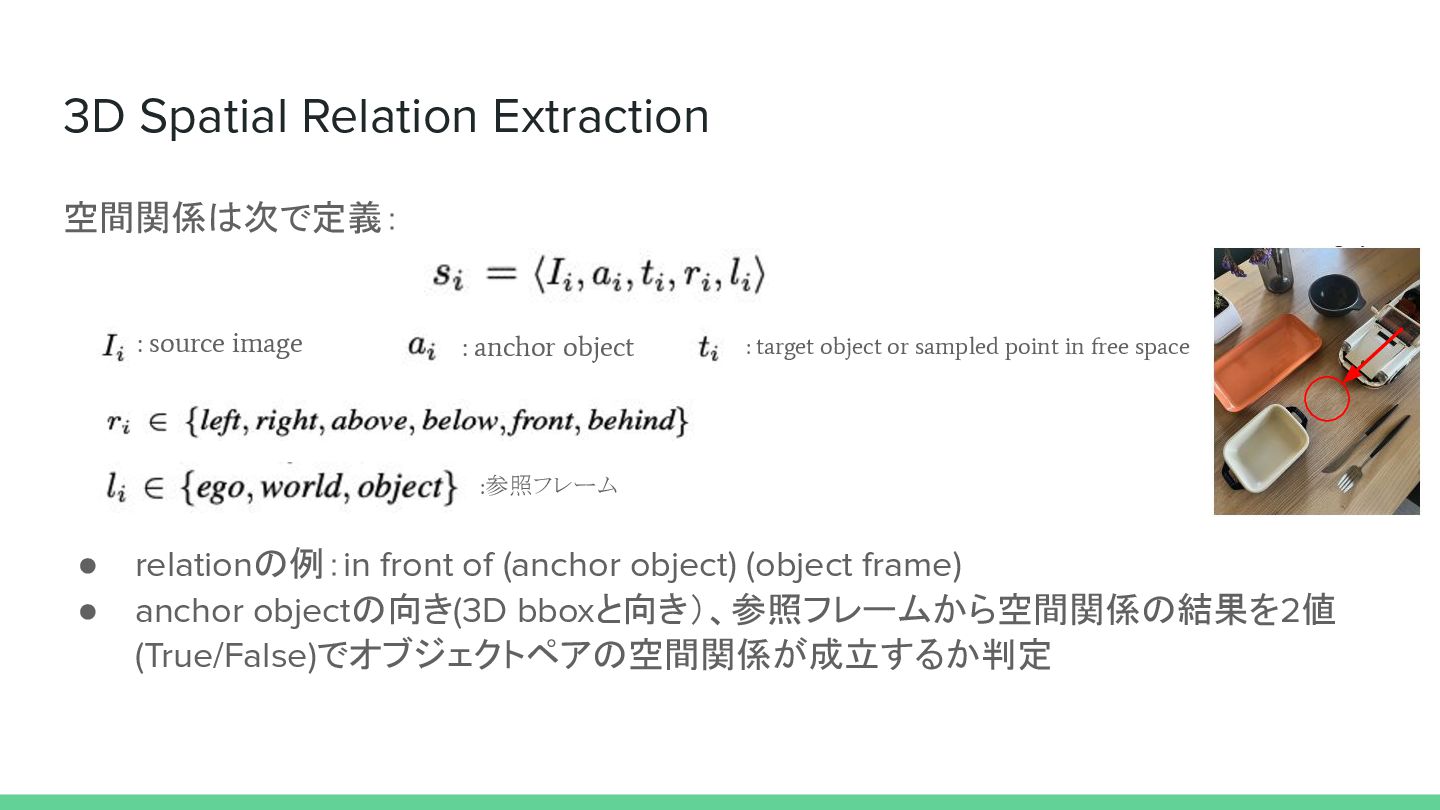
3D Spatial Relation Extraction 空間関係は次で定義: • relationの例:in front of (anchor
object) (object frame) • anchor objectの向き(3D bboxと向き)、参照フレームから空間関係の結果を2値 (True/False)でオブジェクトペアの空間関係が成立するか判定 : source image : anchor object : target object or sampled point in free space :参照フレーム
2D Spatial Point and Region Sampling ContextとCompatibilityタスクのための2次元画像空間でのアノテーションを生成 • 3D bboxとカメラパラメーターを利用して、occupancy
mapを作成 • スペースにあるサンプリングした点をレイキャスティングで選択 • サンプリングした点の領域に対象物体が収まるか判定
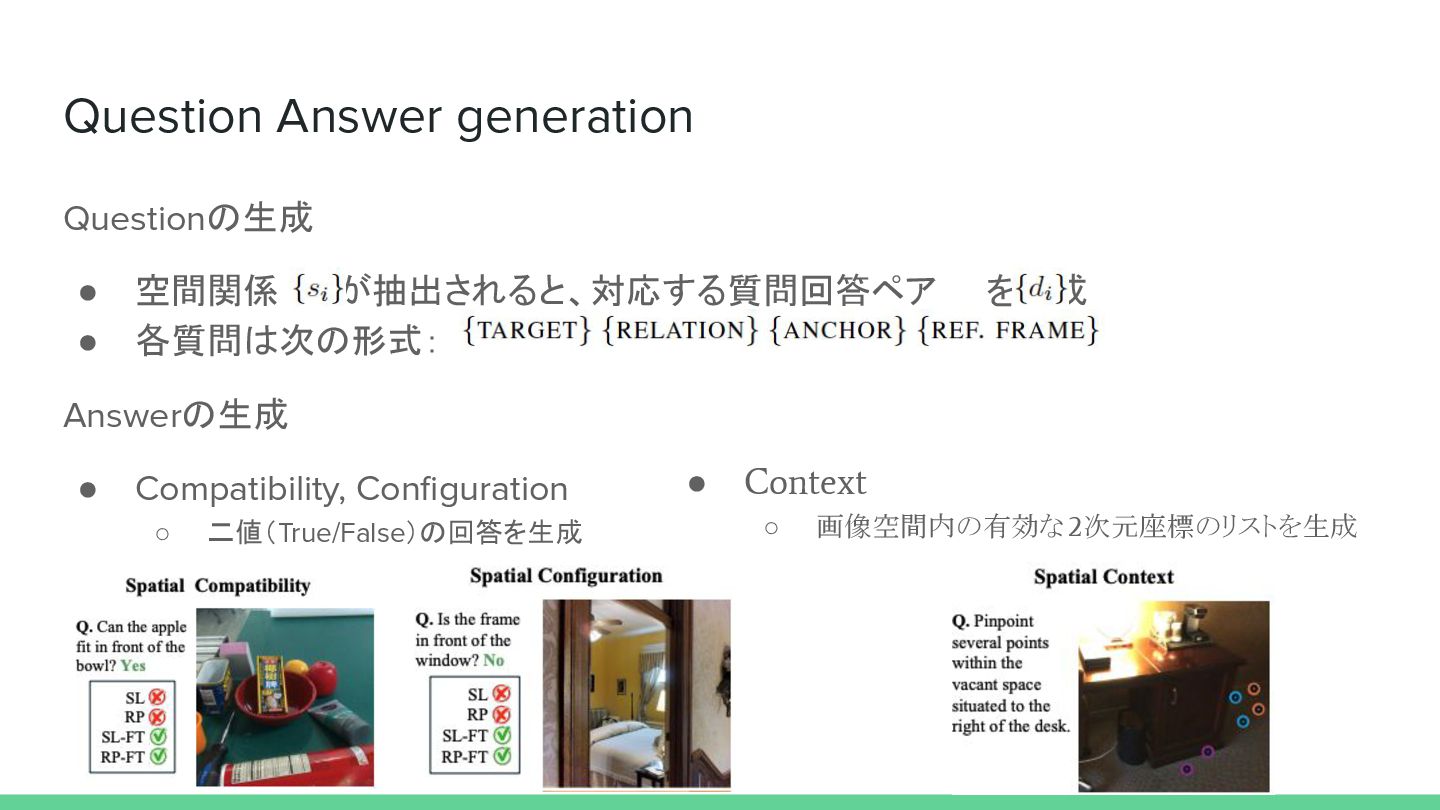
Question Answer generation Questionの生成 • 空間関係 が抽出されると、対応する質問回答ペア を生成 • 各質問は次の形式: Answerの生成
• Compatibility, Configuration ◦ 二値(True/False)の回答を生成 • Context ◦ 画像空間内の有効な 2次元座標のリストを生成
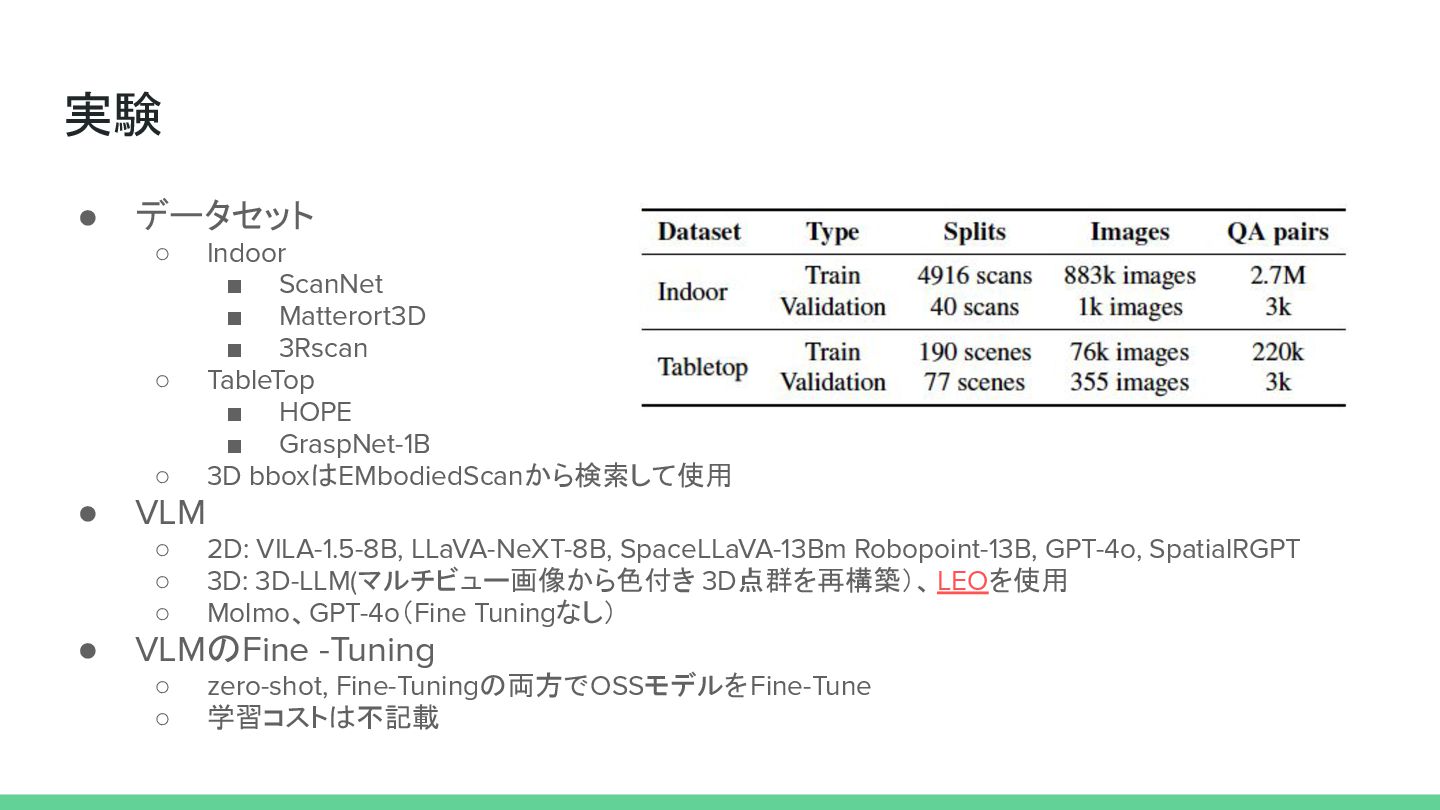
実験 • データセット ◦ Indoor ▪ ScanNet ▪ Matterort3D ▪
3Rscan ◦ TableTop ▪ HOPE ▪ GraspNet-1B ◦ 3D bboxはEMbodiedScanから検索して使用 • VLM ◦ 2D: VILA-1.5-8B, LLaVA-NeXT-8B, SpaceLLaVA-13Bm Robopoint-13B, GPT-4o, SpatialRGPT ◦ 3D: 3D-LLM(マルチビュー画像から色付き 3D点群を再構築)、LEOを使用 ◦ Molmo、GPT-4o(Fine Tuningなし) • VLMのFine -Tuning ◦ zero-shot, Fine-Tuningの両方でOSSモデルをFine-Tune ◦ 学習コストは不記載
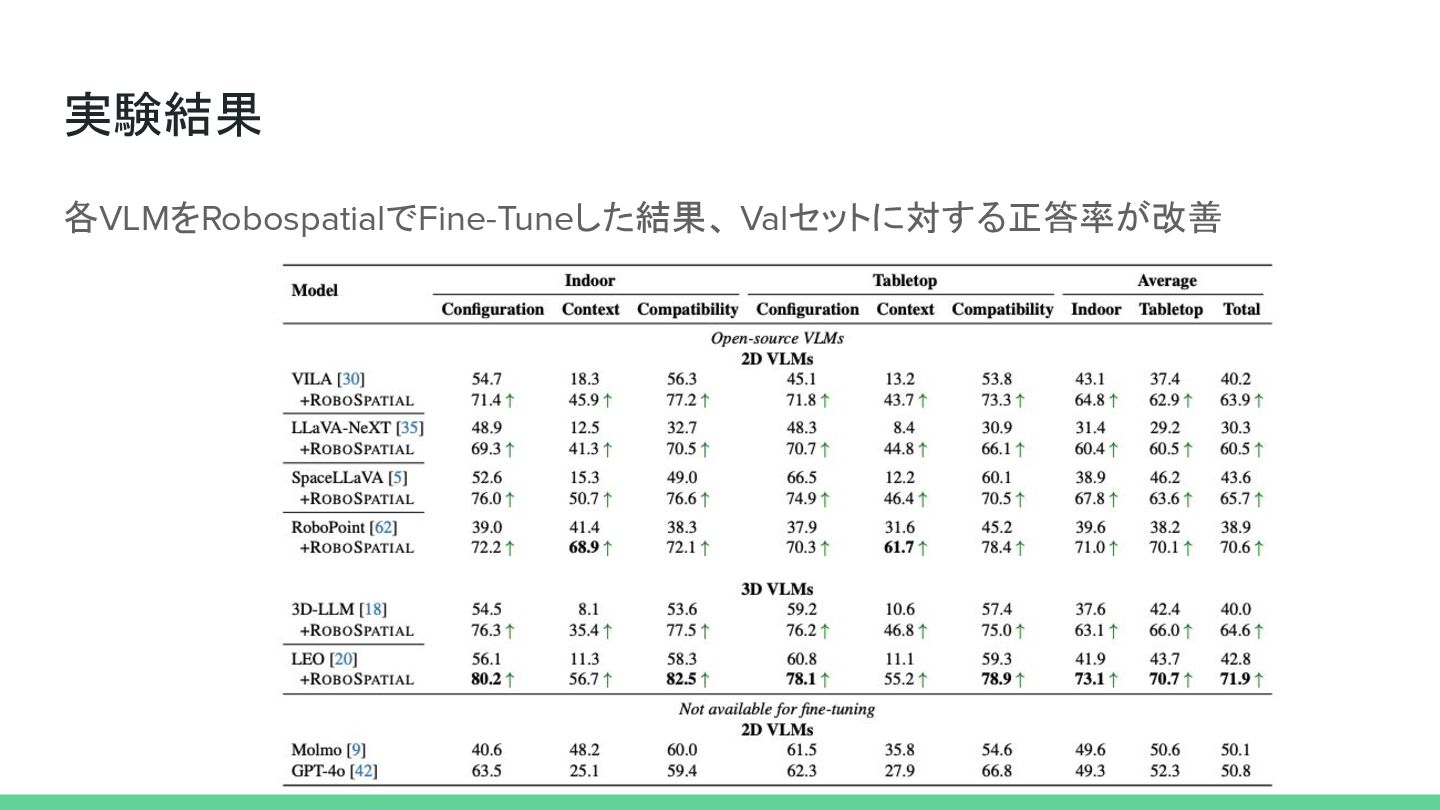
実験結果 各VLMをRobospatialでFine-Tuneした結果、 Valセットに対する正答率が改善
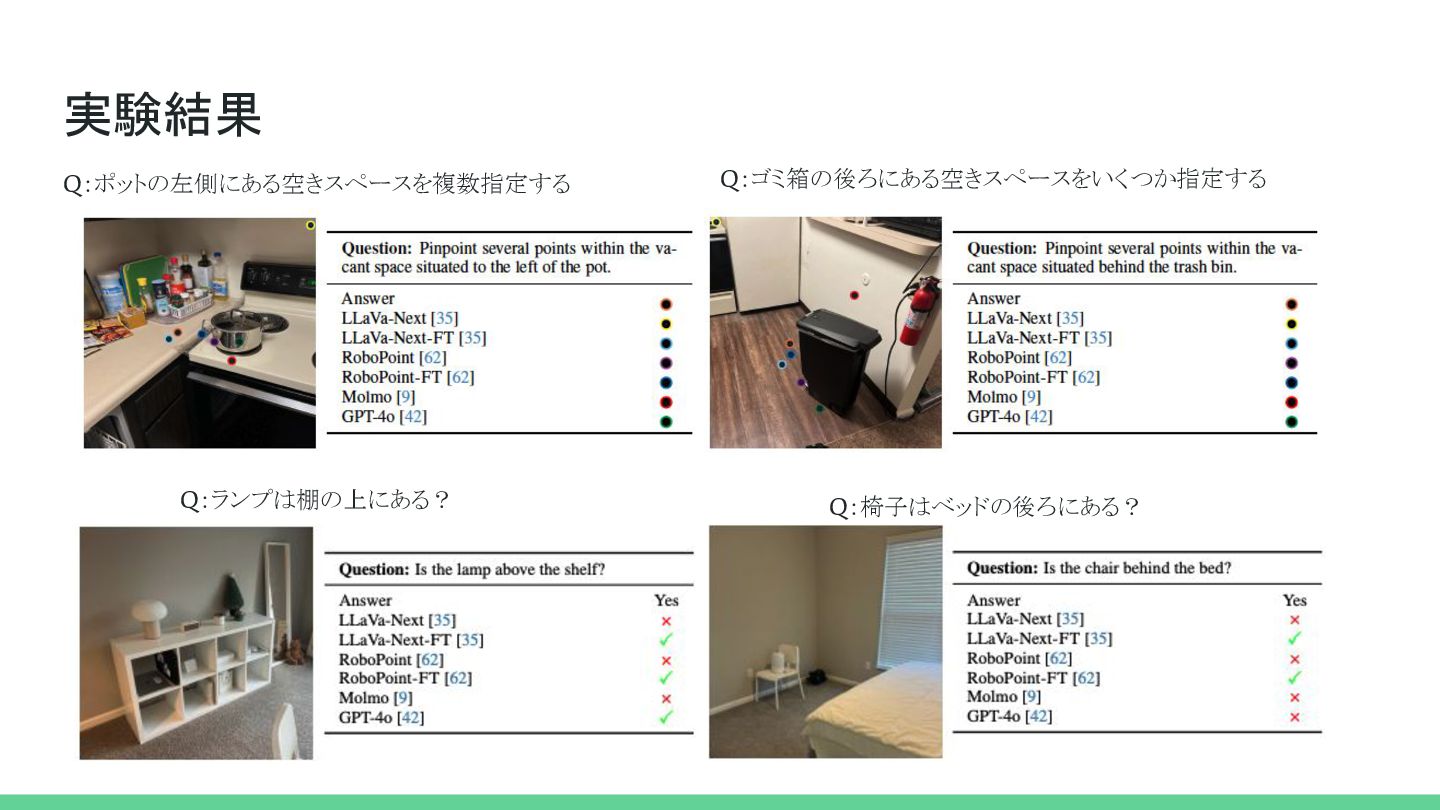
実験結果 各VLMをRobospatialでFine-Tuneした結果、 Valセットに対する正答率・座標指定の精 度が改善
実験結果 Q:ゴミ箱の後ろにある空きスペースをいくつか指定する Q:ポットの左側にある空きスペースを複数指定する Q:椅子はベッドの後ろにある? Q:ランプは棚の上にある?
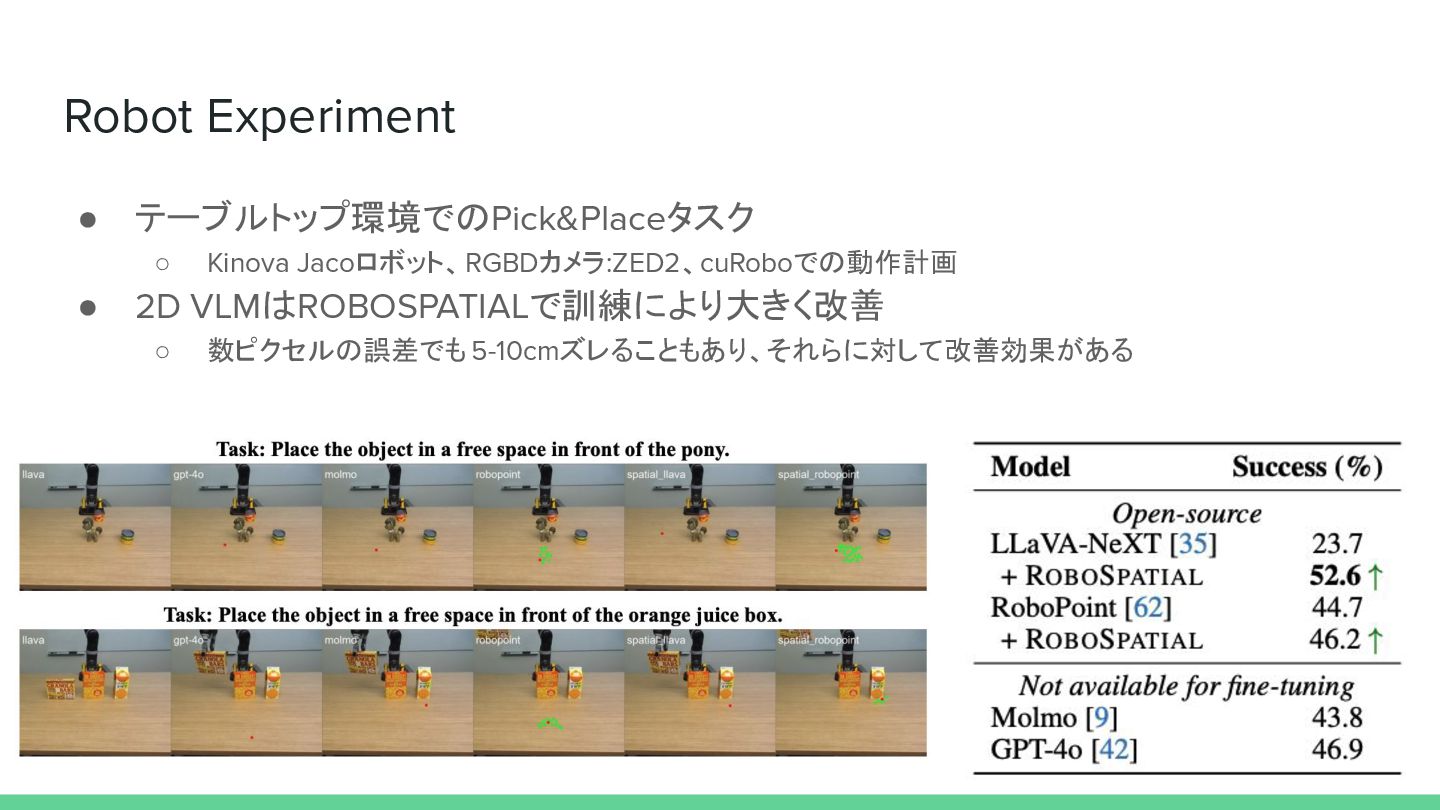
Robot Experiment • テーブルトップ環境でのPick&Placeタスク ◦ Kinova Jacoロボット、RGBDカメラ:ZED2、cuRoboでの動作計画 • 2D VLMはROBOSPATIALで訓練により大きく改善
◦ 数ピクセルの誤差でも 5-10cmズレることもあり、それらに対して改善効果がある
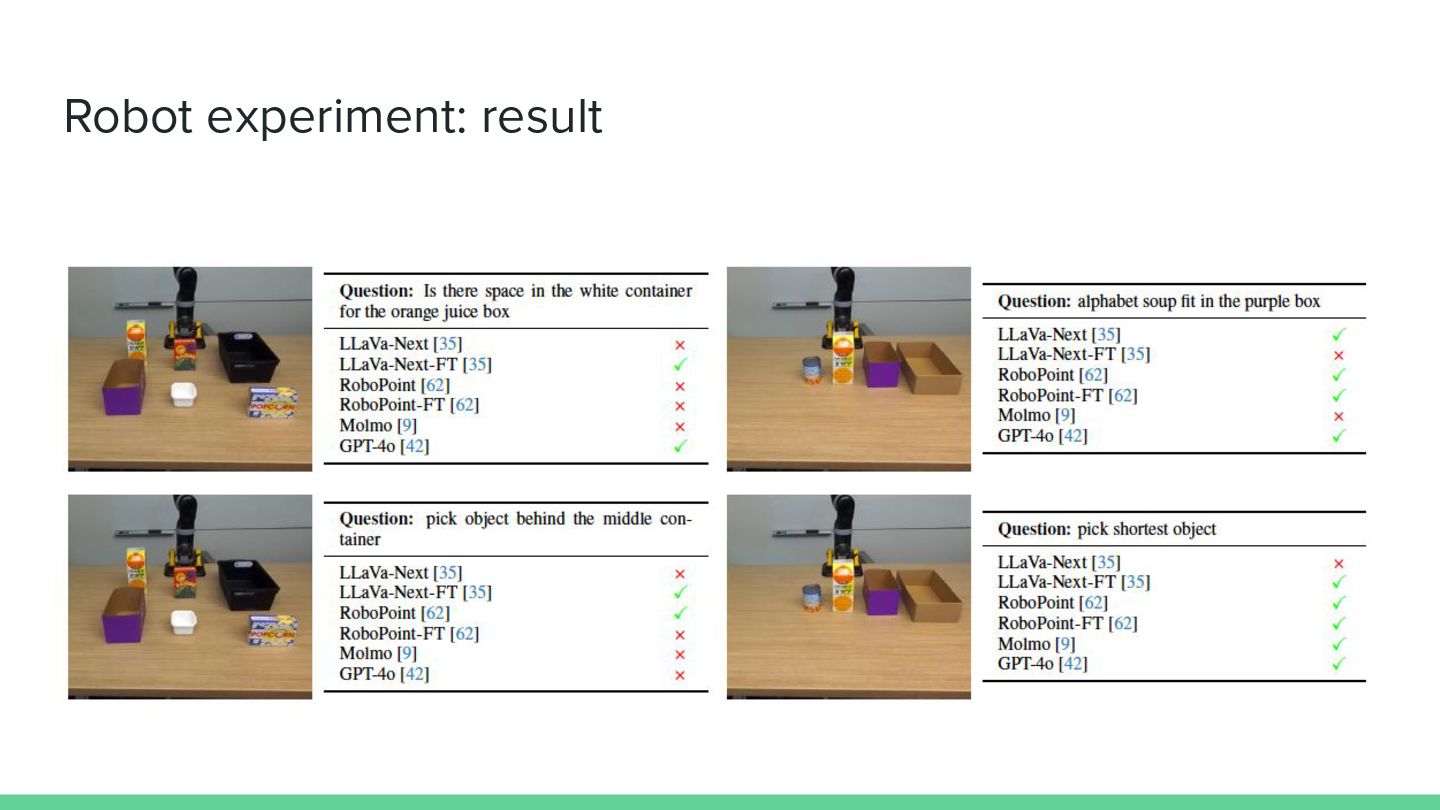
Robot experiment: result
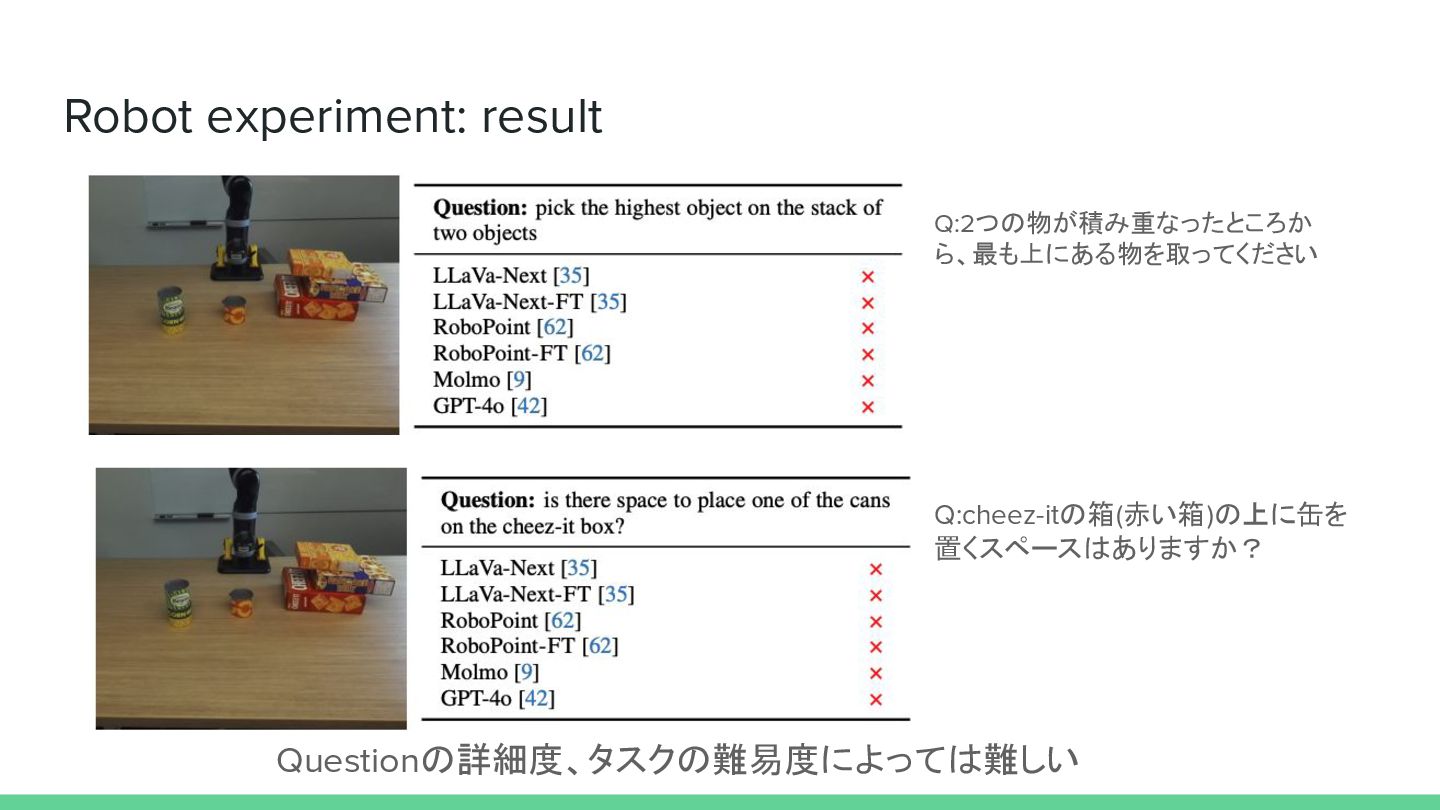
Robot experiment: result Q:2つの物が積み重なったところか ら、最も上にある物を取ってください Q:cheez-itの箱(赤い箱)の上に缶を 置くスペースはありますか? Questionの詳細度、タスクの難易度によっては難しい
考察・まとめ • 考察:データセットによる空間推論が出来るのか? ◦ 「上に、下に」など空間マッピング、「隣に、そばに」など物体間の近接性の理解が向上 ◦ 視点の理解:参照フレームの導入により推論が向上し、物体の幾何・方向と空間言語の関連付け を学習できている ◦ 3D
VLMでは自己座標系、物体座標系で効果がある • まとめ:Robospatialデータセットの提案 ◦ 空間位置関係の理解が必要なタスクへの応用が可能 ▪ 物体の位置関係、参照フレームの違いに対応した推論が可能 ◦ 新たなデータセットに対しても拡張可能
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}