Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
非常停止スイッチによるモーターの停止方法 / TC2021 Symposium Orienta...
Search
つくばチャレンジ実行委員会
January 10, 2022
Technology
3.9k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
非常停止スイッチによるモーターの停止方法 / TC2021 Symposium Oriental Motor
つくばチャレンジ2021シンポジウム - connpass
https://tsukubachallenge.connpass.com/event/234618/
つくばチャレンジ実行委員会
January 10, 2022
More Decks by つくばチャレンジ実行委員会
See All by つくばチャレンジ実行委員会
つくばチャレンジ2024EX@イーアスつくば課題コース
tsukubachallenge
0
2k
つくばチャレンジ2024全体概要
tsukubachallenge
0
810
つくばチャレンジ2024EX@イーアスつくば概要
tsukubachallenge
0
730
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場課題コース
tsukubachallenge
0
1.9k
つくばチャレンジ2023第2回LT大会オープニング
tsukubachallenge
0
500
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場概要
tsukubachallenge
0
1.7k
つくばチャレンジ2023EX with PLATEAU チュートリアル
tsukubachallenge
0
3.5k
つくばチャレンジ2023第1回LT大会オープニング
tsukubachallenge
0
570
つくばチャレンジ2023EX@イーアスつくば課題コース
tsukubachallenge
0
3.6k
Other Decks in Technology
See All in Technology
実装だけじゃない! CCA-F取得エンジニアが教えるClaude Code開発プロセス活用術
diggymo
2
660
オブザーバビリティ、本当に活用できてる? 〜API連携×生成AIで成熟度を自動評価〜
dmmsre
1
3.1k
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
2
200
なぜ私たちのSREプラクティスはなかなか機能しないのか 〜システムより先に組織を見る〜 / Why our SRE practices aren't really working
vtryo
3
3.6k
「最後に責任を取るのはチーム」— 人間のPRレビューを最小化してアップデートしたメンタルモデル
jnishime_dresscode
0
580
事業価値を⽣み出すSREへ SREが担うべき意思決定の5層
kenta_hi
2
3.5k
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
Genie Ontologyは銀の弾丸かを考える / Is Genie Ontology a Silver Bullet?
nttcom
0
250
Gen3R: 3D Scene Generation Meets Feed-Forward Reconstruction
spatial_ai_network
0
120
タスクの複雑さでモデルを選ぶ ── Thompson Samplingで動かす“トークン/コスト最適化
satohy0323
0
310
Devsumi 2026 Summer 人もAIも使える共通基盤を事業の加速装置にする~デザインシステム運用に学ぶ組織レバレッジ~ 渡辺 凌央
legalontechnologies
PRO
0
100
ruby.wasmとPicoRuby.wasmに対応した仮想DOMライブラリを作ってる話 #kaigieffect_kaigi
sue445
PRO
0
140
Featured
See All Featured
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
220
Embracing the Ebb and Flow
colly
88
5.1k
Git: the NoSQL Database
bkeepers
PRO
432
67k
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
220
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
Unsuck your backbone
ammeep
672
58k
The Straight Up "How To Draw Better" Workshop
denniskardys
239
140k
技術選定の審美眼(2025年版) / Understanding the Spiral of Technologies 2025 edition
twada
PRO
118
120k
Evolution of real-time – Irina Nazarova, EuRuKo, 2024
irinanazarova
9
1.4k
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
420
SEO for Brand Visibility & Recognition
aleyda
0
4.6k
JavaScript: Past, Present, and Future - NDC Porto 2020
reverentgeek
52
6k
Transcript
1 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 つくばチャレンジ2021シンポジウム ブラシレスモーターの停止方法 ~移動ロボットを止めるには~ 2022年1月8日
オリエンタルモーター株式会社 制御開発部 引頭 一樹
2 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 発表の流れ・概要 [第一部:理論編] ブラシレスモーターを用いた移動ロボットにおける,停止時の動作について •
急停止させたら,ドライバが破損した,理由は? • 具体的な停止方法・破損対策の紹介 [第二部:アプリケーション編] 最新のブラシレスモータードライバを用いた際の,停止の実現方法 • 制御による減速,停止方法 • 坂道での停止→手押しによる移動→自律運転復帰 の事例紹介 ブラシレスモーターついて情報提供することで, つくばチャレンジに貢献する ※本資料では,つくばチャレンジにおける停止について扱う
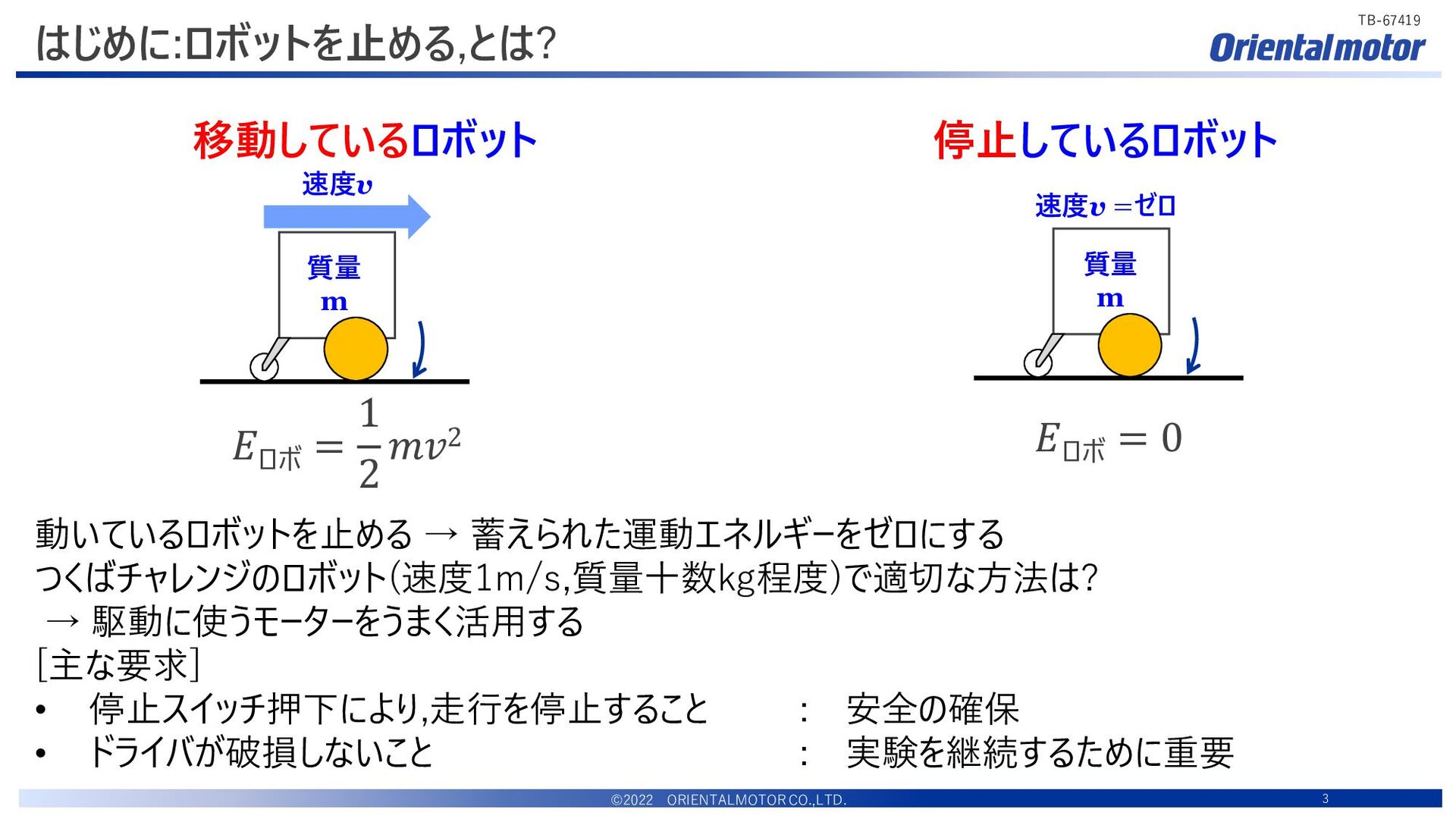
3 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 はじめに:ロボットを止める,とは? 移動しているロボット 停止しているロボット 速度v
質量 m 速度v =ゼロ 𝐸 ロボ = 1 2 𝑚𝑣2 𝐸 ロボ = 0 質量 m 動いているロボットを止める → 蓄えられた運動エネルギーをゼロにする つくばチャレンジのロボット(速度1m/s,質量十数kg程度)で適切な方法は? → 駆動に使うモーターをうまく活用する [主な要求] • 停止スイッチ押下により,走行を停止すること : 安全の確保 • ドライバが破損しないこと : 実験を継続するために重要
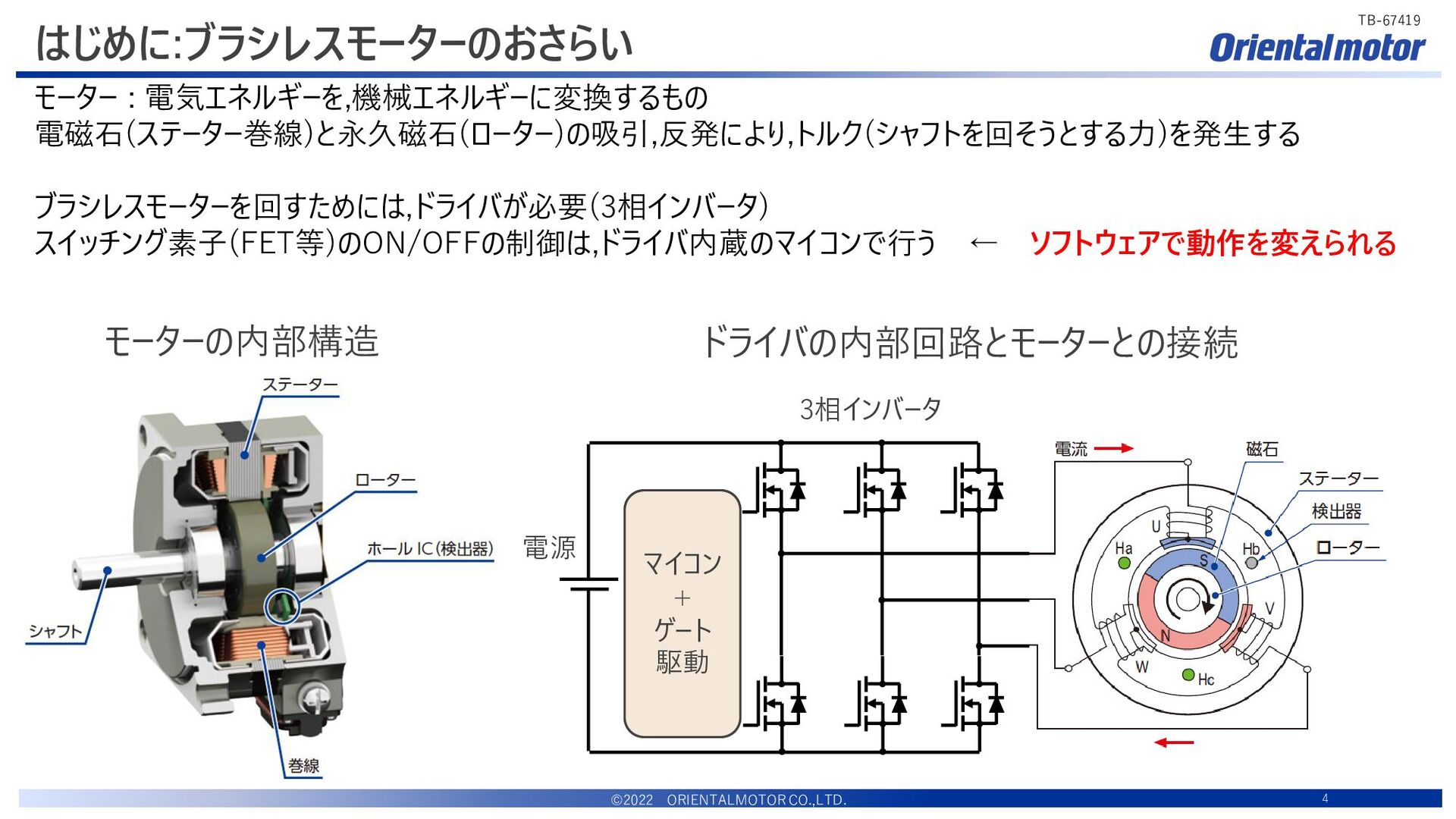
4 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 はじめに:ブラシレスモーターのおさらい モーター : 電気エネルギーを,機械エネルギーに変換するもの
電磁石(ステーター巻線)と永久磁石(ローター)の吸引,反発により,トルク(シャフトを回そうとする力)を発生する ブラシレスモーターを回すためには,ドライバが必要(3相インバータ) スイッチング素子(FET等)のON/OFFの制御は,ドライバ内蔵のマイコンで行う ← ソフトウェアで動作を変えられる モーターの内部構造 電源 3相インバータ ドライバの内部回路とモーターとの接続 マイコン + ゲート 駆動
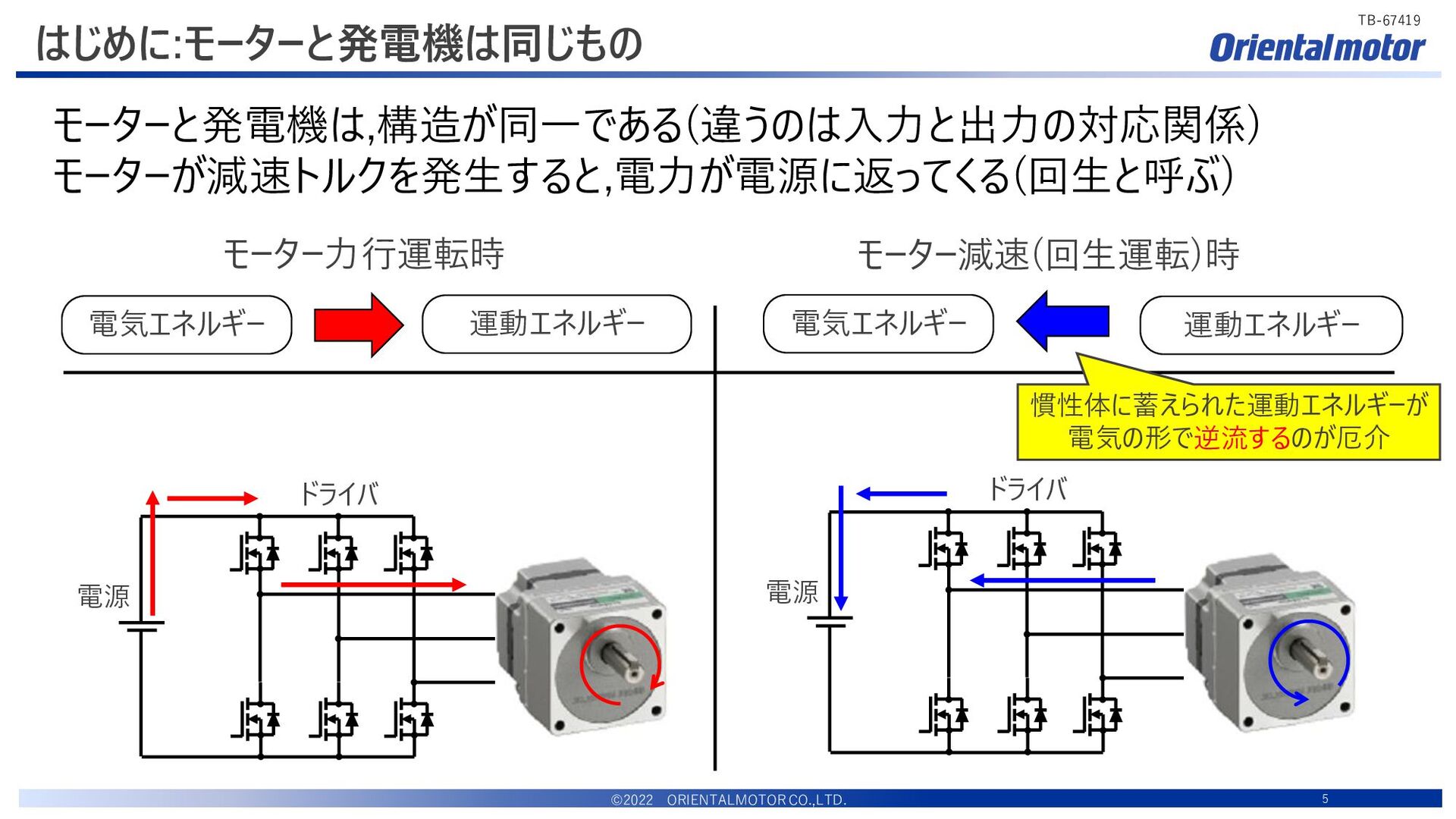
5 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 はじめに:モーターと発電機は同じもの モーターと発電機は,構造が同一である(違うのは入力と出力の対応関係) モーターが減速トルクを発生すると,電力が電源に返ってくる(回生と呼ぶ) 電源
ドライバ 電源 ドライバ モーター力行運転時 モーター減速(回生運転)時 慣性体に蓄えられた運動エネルギーが 電気の形で逆流するのが厄介 電気エネルギー 運動エネルギー 運動エネルギー 電気エネルギー
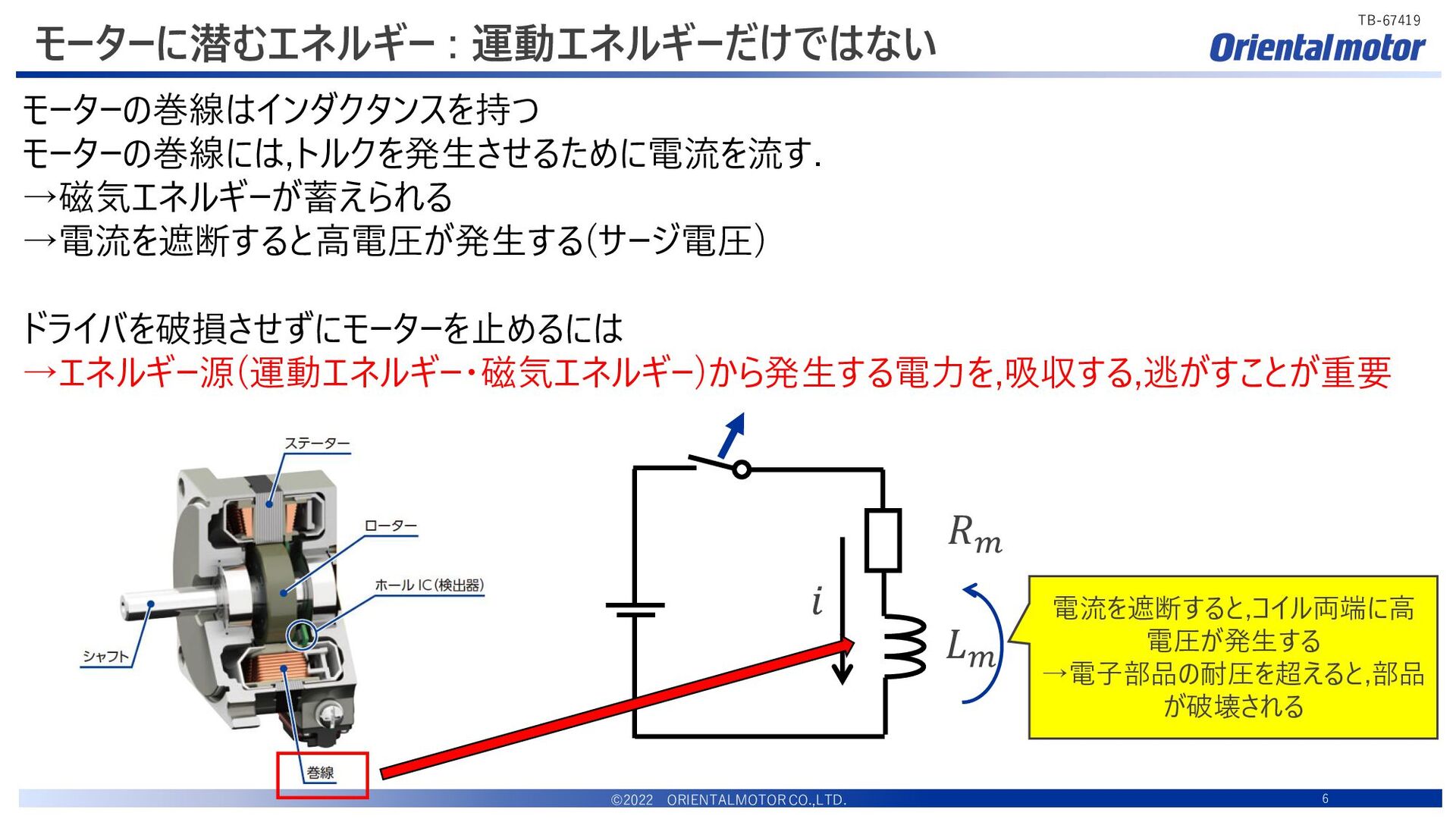
6 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 モーターに潜むエネルギー : 運動エネルギーだけではない モーターの巻線はインダクタンスを持つ
モーターの巻線には,トルクを発生させるために電流を流す. →磁気エネルギーが蓄えられる →電流を遮断すると高電圧が発生する(サージ電圧) ドライバを破損させずにモーターを止めるには →エネルギー源(運動エネルギー・磁気エネルギー)から発生する電力を,吸収する,逃がすことが重要 𝑅𝑚 𝐿𝑚 𝑖 電流を遮断すると,コイル両端に高 電圧が発生する →電子部品の耐圧を超えると,部品 が破壊される
7 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 なぜドライバが壊れることがあるのか? ドライバは電子部品で構成される 電子部品は,耐えられる電流,電圧,温度が決まっている (絶対最大定格という)
→絶対最大定格を超えると,部品が壊れる 急停止や電源遮断を行うと, 絶対最大定格を超えるような 電圧,電流が発生する場合がある. なぜ発生するのか? 発生源はどこか? 引用元:東芝デバイス&ストレージ社webサイト https://toshiba.semicon-storage.com/jp/semiconductor/product/mosfets/12v-300v- mosfets/detail.2SK2232.html このFETの場合 ドレインソース間に60Vを超える 電圧を加えると, 破損する可能性あり
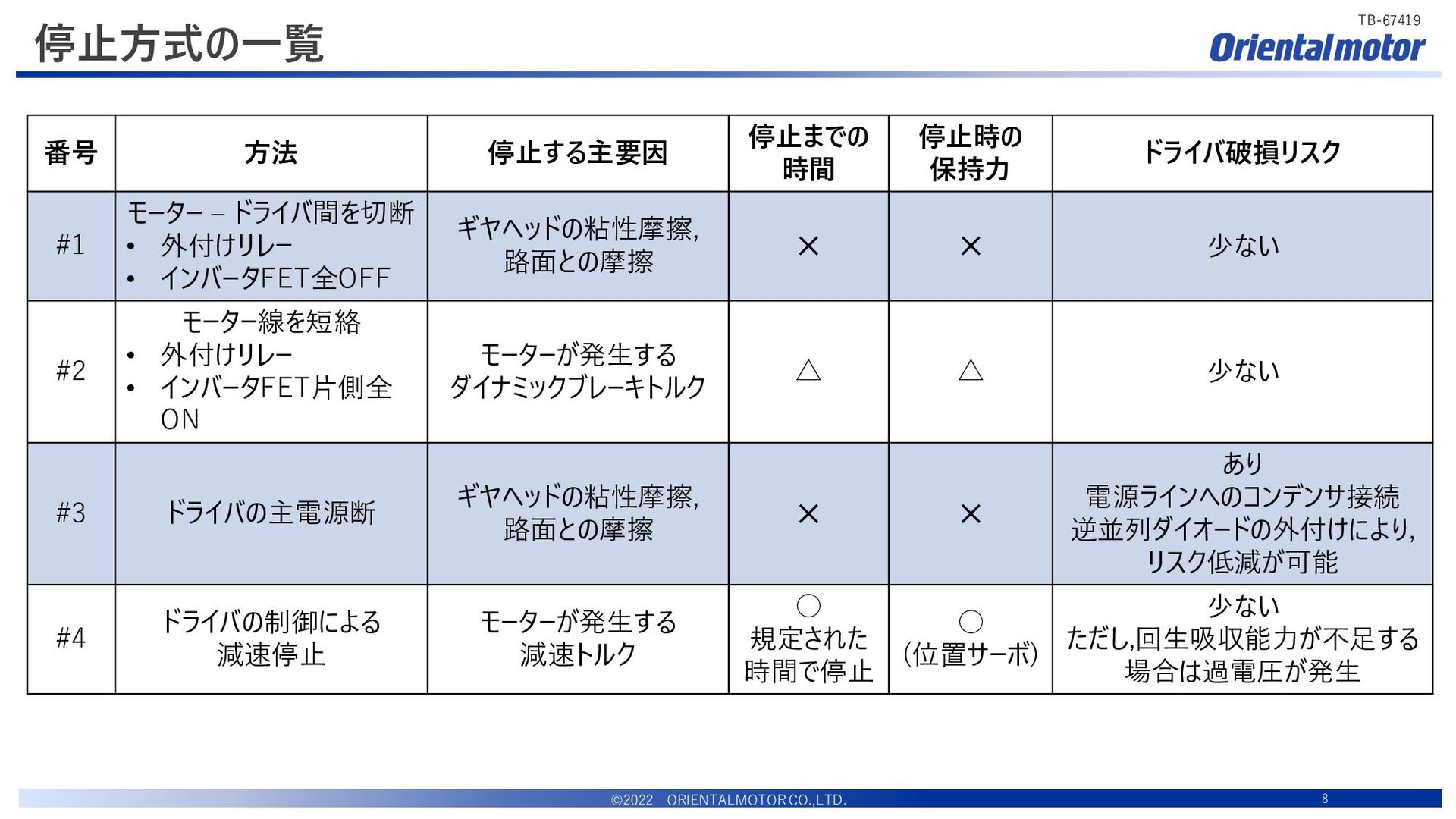
8 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 停止方式の一覧 番号 方法 停止する主要因
停止までの 時間 停止時の 保持力 ドライバ破損リスク #1 モーター – ドライバ間を切断 • 外付けリレー • インバータFET全OFF ギヤヘッドの粘性摩擦, 路面との摩擦 ✕ ✕ 少ない #2 モーター線を短絡 • 外付けリレー • インバータFET片側全 ON モーターが発生する ダイナミックブレーキトルク △ △ 少ない #3 ドライバの主電源断 ギヤヘッドの粘性摩擦, 路面との摩擦 ✕ ✕ あり 電源ラインへのコンデンサ接続 逆並列ダイオードの外付けにより, リスク低減が可能 #4 ドライバの制御による 減速停止 モーターが発生する 減速トルク ◦ 規定された 時間で停止 ◦ (位置サーボ) 少ない ただし,回生吸収能力が不足する 場合は過電圧が発生
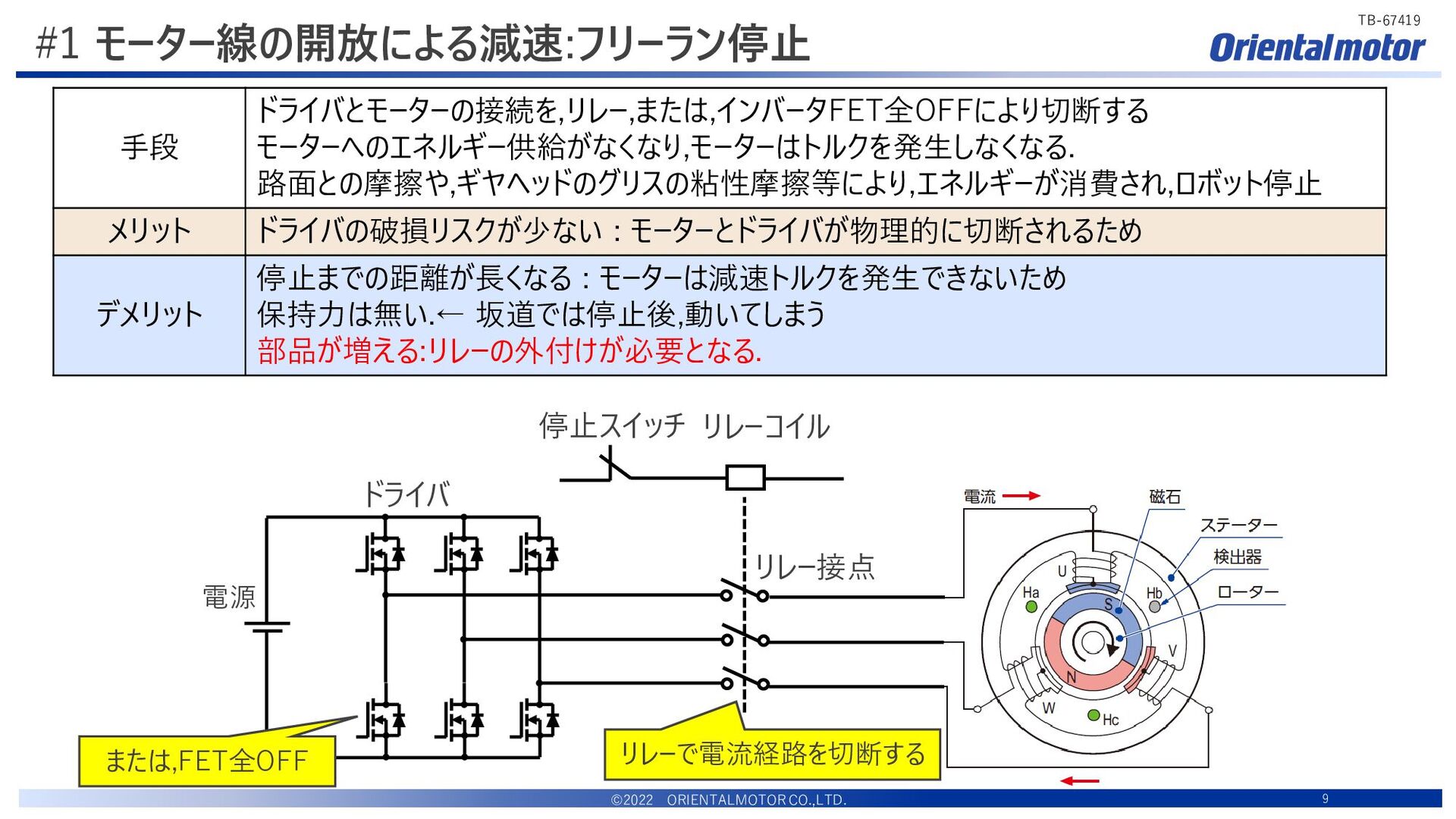
9 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #1 モーター線の開放による減速:フリーラン停止 電源 ドライバ
リレーコイル 停止スイッチ 手段 ドライバとモーターの接続を,リレー,または,インバータFET全OFFにより切断する モーターへのエネルギー供給がなくなり,モーターはトルクを発生しなくなる. 路面との摩擦や,ギヤヘッドのグリスの粘性摩擦等により,エネルギーが消費され,ロボット停止 メリット ドライバの破損リスクが少ない : モーターとドライバが物理的に切断されるため デメリット 停止までの距離が長くなる : モーターは減速トルクを発生できないため 保持力は無い.← 坂道では停止後,動いてしまう 部品が増える:リレーの外付けが必要となる. リレー接点 リレーで電流経路を切断する または,FET全OFF
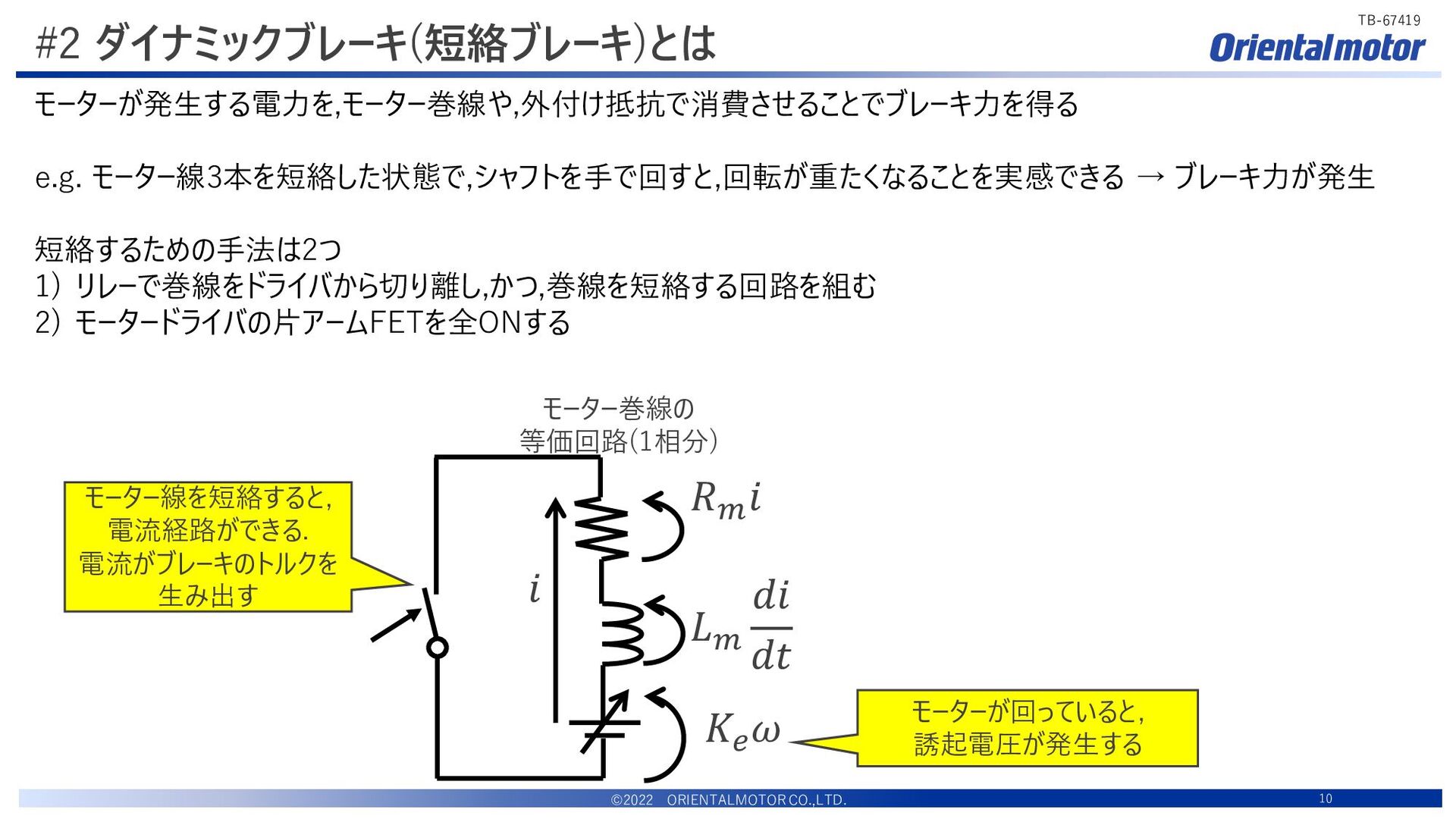
10 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #2 ダイナミックブレーキ(短絡ブレーキ)とは モーターが発生する電力を,モーター巻線や,外付け抵抗で消費させることでブレーキ力を得る e.g.
モーター線3本を短絡した状態で,シャフトを手で回すと,回転が重たくなることを実感できる → ブレーキ力が発生 短絡するための手法は2つ 1) リレーで巻線をドライバから切り離し,かつ,巻線を短絡する回路を組む 2) モータードライバの片アームFETを全ONする モーター巻線の 等価回路(1相分) 𝑅𝑚 𝑖 𝐿𝑚 𝑑𝑖 𝑑𝑡 𝐾𝑒 𝜔 𝑖 モーターが回っていると, 誘起電圧が発生する モーター線を短絡すると, 電流経路ができる. 電流がブレーキのトルクを 生み出す
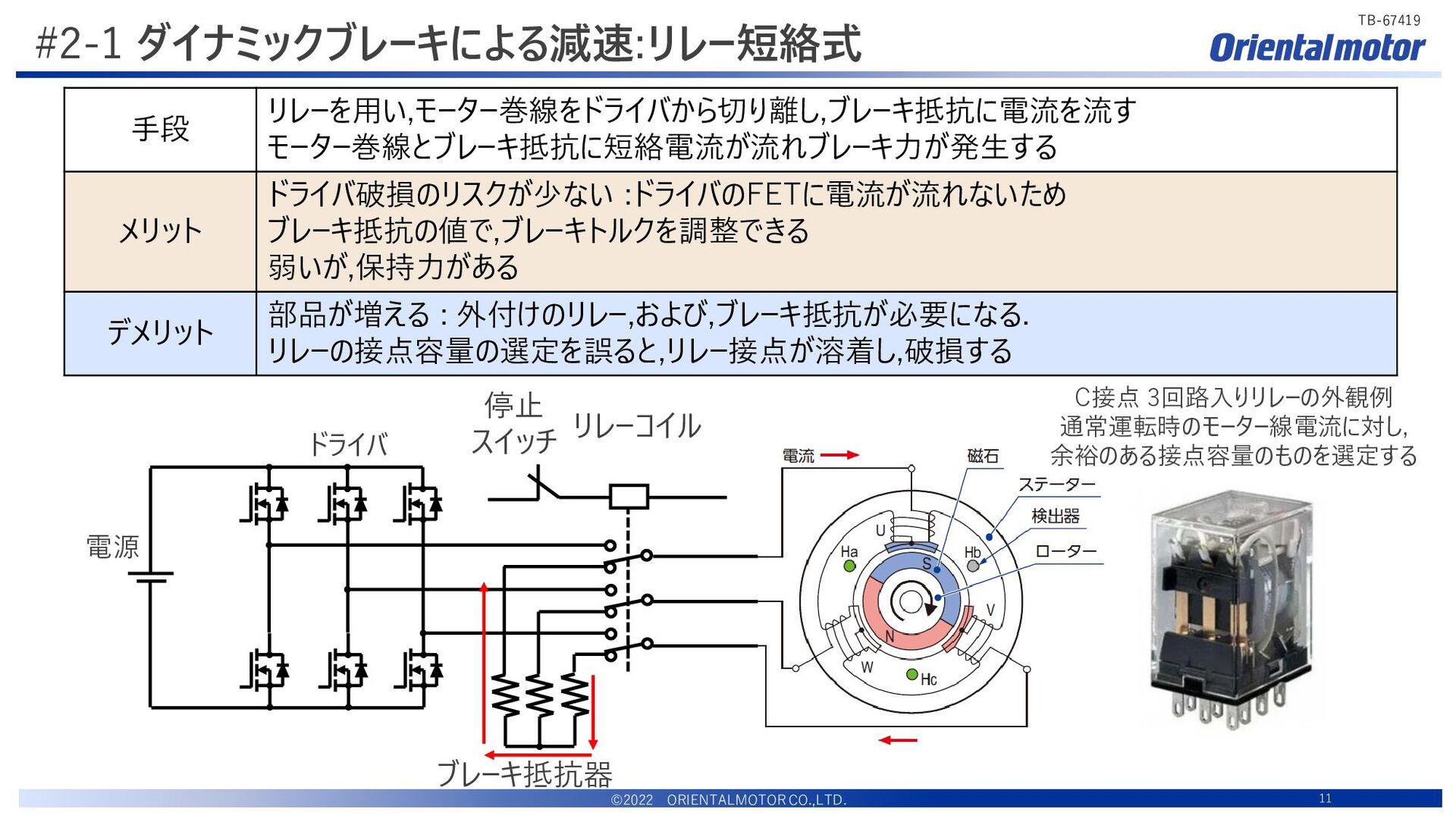
11 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #2-1 ダイナミックブレーキによる減速:リレー短絡式 電源 ドライバ
リレーコイル 停止 スイッチ ブレーキ抵抗器 手段 リレーを用い,モーター巻線をドライバから切り離し,ブレーキ抵抗に電流を流す モーター巻線とブレーキ抵抗に短絡電流が流れブレーキ力が発生する メリット ドライバ破損のリスクが少ない :ドライバのFETに電流が流れないため ブレーキ抵抗の値で,ブレーキトルクを調整できる 弱いが,保持力がある デメリット 部品が増える : 外付けのリレー,および,ブレーキ抵抗が必要になる. リレーの接点容量の選定を誤ると,リレー接点が溶着し,破損する C接点 3回路入りリレーの外観例 通常運転時のモーター線電流に対し, 余裕のある接点容量のものを選定する
12 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #2-2 ダイナミックブレーキによる減速:下アームFET全ON 電源 ドライバ
手段 ドライバの下アームFETをすべてONにする モーター巻線が,FET経由で短絡され,ブレーキ力が発生する メリット 外付け部品が無いため,コンパクトである 弱いが,保持力がある デメリット 短絡時に流れる電流が非常に大きくなる(巻線抵抗値が小さい,かつ,制限抵抗が無いため) →ドライバのFETに大電流のストレスが加わる → 定格を超えるとFETが破損 →電流定格が大きいFETに変更することで対策は可能(ただし,FETの値段が上がる) ブレーキトルクの調整は困難 出力が大きいモーターほど,短絡電流 は大きくなる. この方法で止められるのは数十W程 度の小型モーターが限界である 下アームのFETを全ON
13 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #3 停止方法 : ドライバ駆動電源を遮断する
逆並列ダイオードを挿入し, 電源に返す手段もあり 電源 ドライバ 𝑈𝐿 = 1 2 𝐿𝐼2 コンデンサ 両端電圧 V+⊿V 1 2 𝐶𝑉2 + 𝑈L = 1 2 𝐶(𝑉 + ∆𝑉)2 初期状態 の静電E 巻線から のエネルギ ⊿Vの増加で エネルギを受け止める 手段 電源スイッチをOFFすることで,ドライバへの電力供給を止める メリット 外付け部品が無いため,コンパクトである デメリット ドライバの状態が不定のため,停止までの時間を規定できない モーター巻線の電流がゼロになり,巻線に蓄えられた磁気エネルギ起因の高電圧が発生する → 外付けの電解コンデンサ(目安1000μF,50V),逆並列ダイオードにより対策が可能 保持力はない 電源SW このコンデンサが重要 開放された磁気エネルギを 静電エネルギで吸収
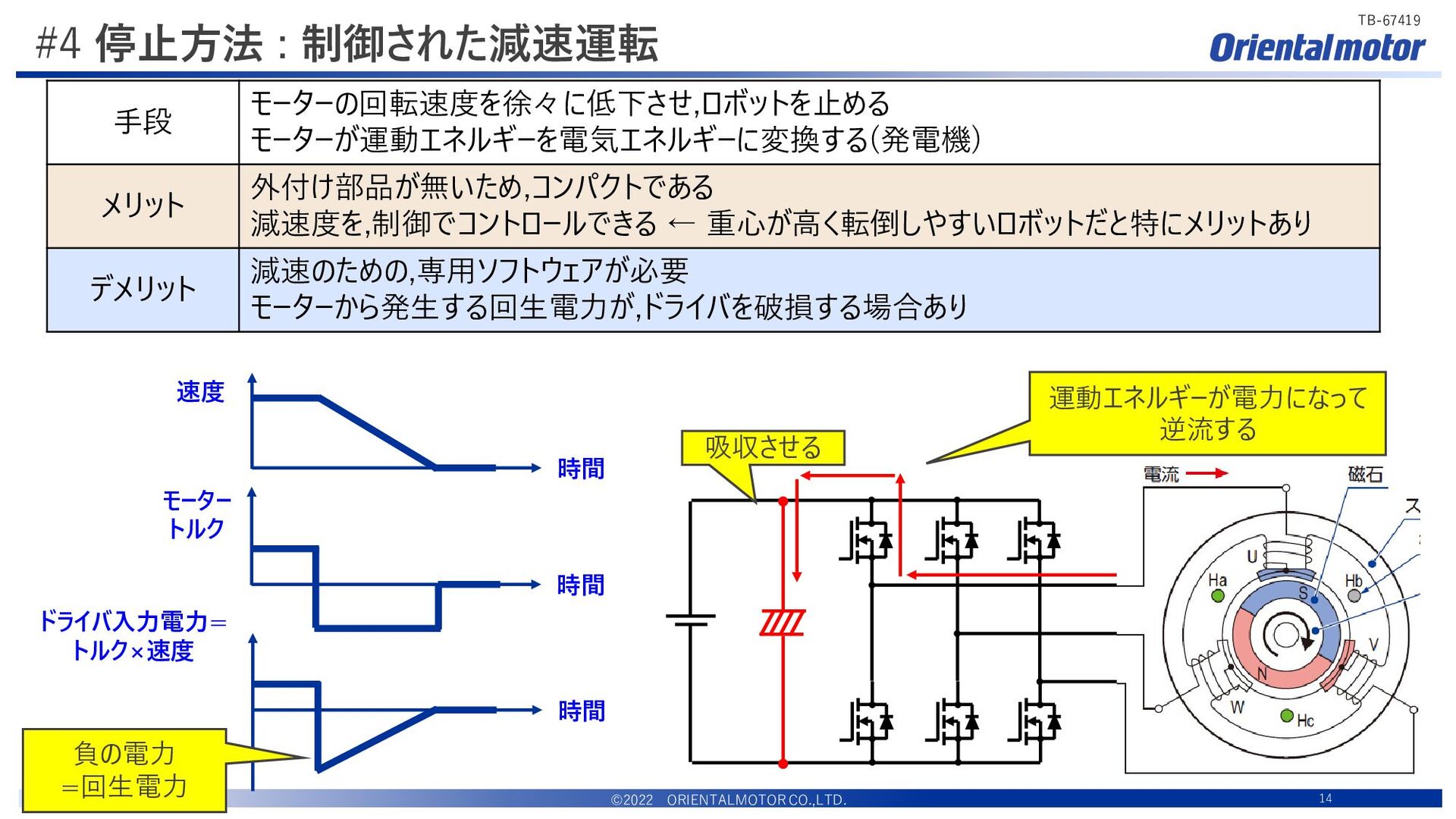
14 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #4 停止方法 : 制御された減速運転
時間 速度 時間 モーター トルク 時間 ドライバ入力電力= トルク×速度 負の電力 =回生電力 運動エネルギーが電力になって 逆流する 吸収させる 手段 モーターの回転速度を徐々に低下させ,ロボットを止める モーターが運動エネルギーを電気エネルギーに変換する(発電機) メリット 外付け部品が無いため,コンパクトである 減速度を,制御でコントロールできる ← 重心が高く転倒しやすいロボットだと特にメリットあり デメリット 減速のための,専用ソフトウェアが必要 モーターから発生する回生電力が,ドライバを破損する場合あり
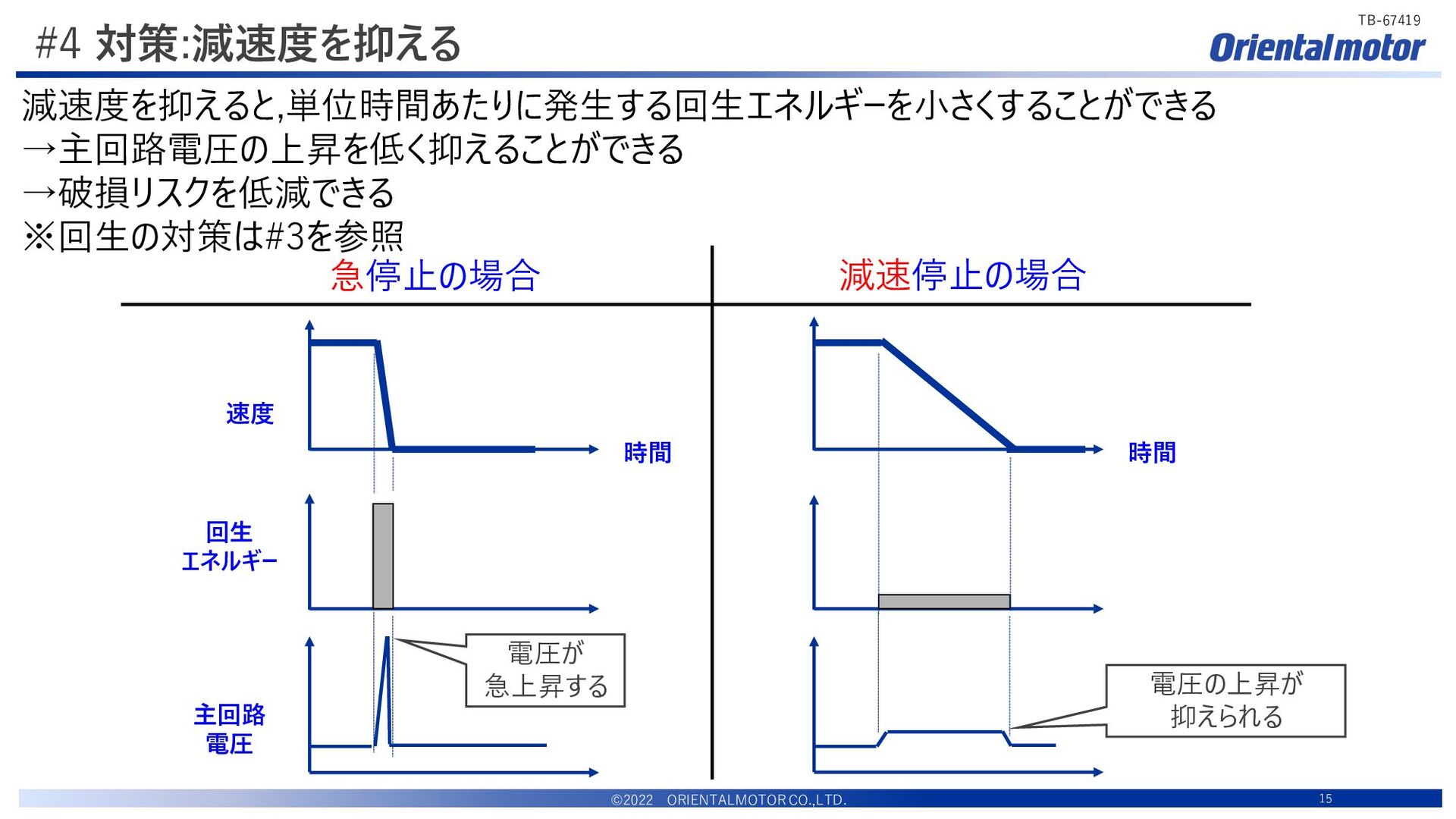
15 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 #4 対策:減速度を抑える 急停止の場合 回生
エネルギー 主回路 電圧 電圧が 急上昇する 時間 速度 電圧の上昇が 抑えられる 時間 減速停止の場合 減速度を抑えると,単位時間あたりに発生する回生エネルギーを小さくすることができる →主回路電圧の上昇を低く抑えることができる →破損リスクを低減できる ※回生の対策は#3を参照
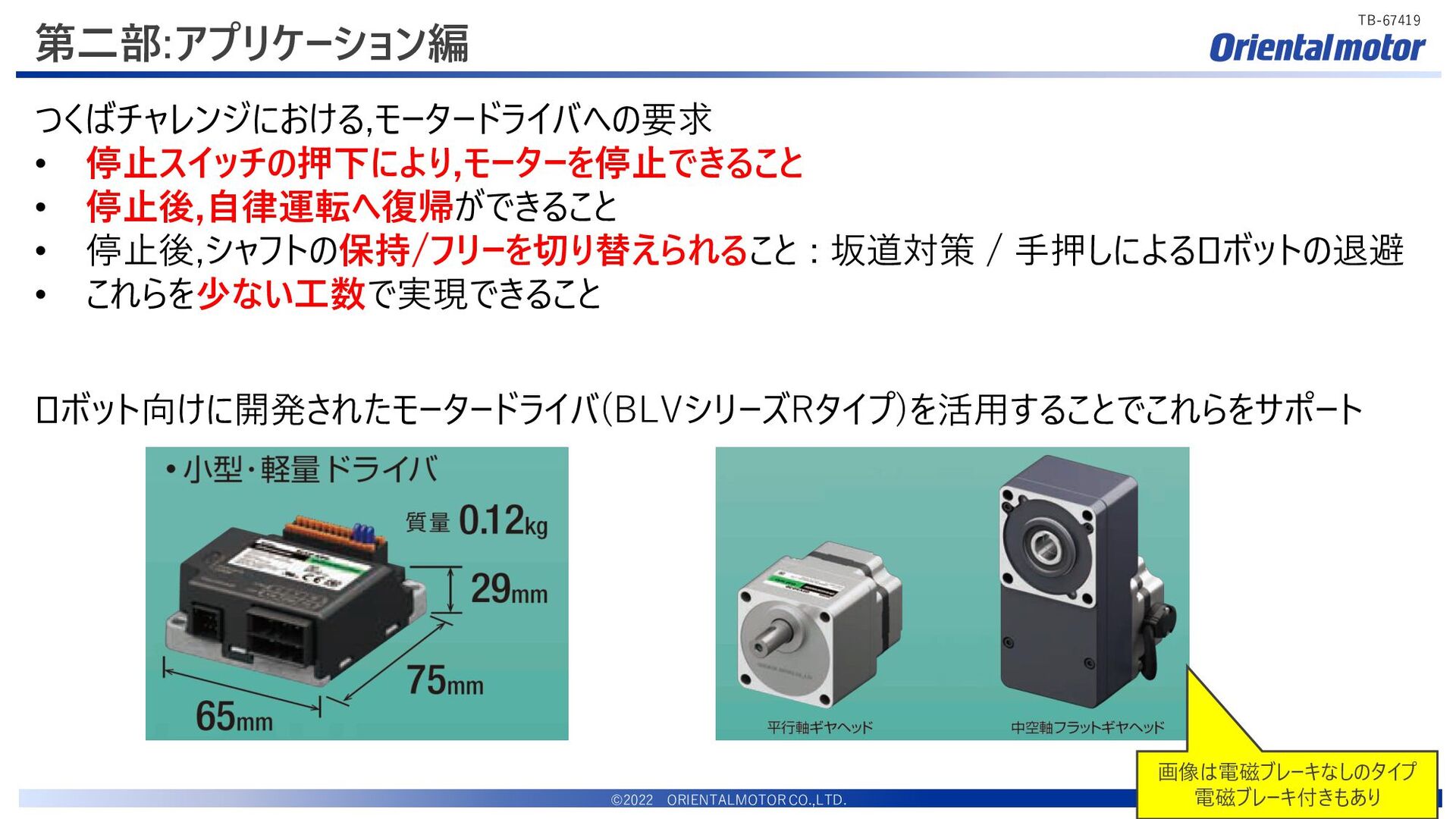
16 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 第二部:アプリケーション編 ロボット向けに開発されたモータードライバ(BLVシリーズRタイプ)を活用することでこれらをサポート つくばチャレンジにおける,モータードライバへの要求 •
停止スイッチの押下により,モーターを停止できること • 停止後,自律運転へ復帰ができること • 停止後,シャフトの保持/フリーを切り替えられること : 坂道対策 / 手押しによるロボットの退避 • これらを少ない工数で実現できること 画像は電磁ブレーキなしのタイプ 電磁ブレーキ付きもあり
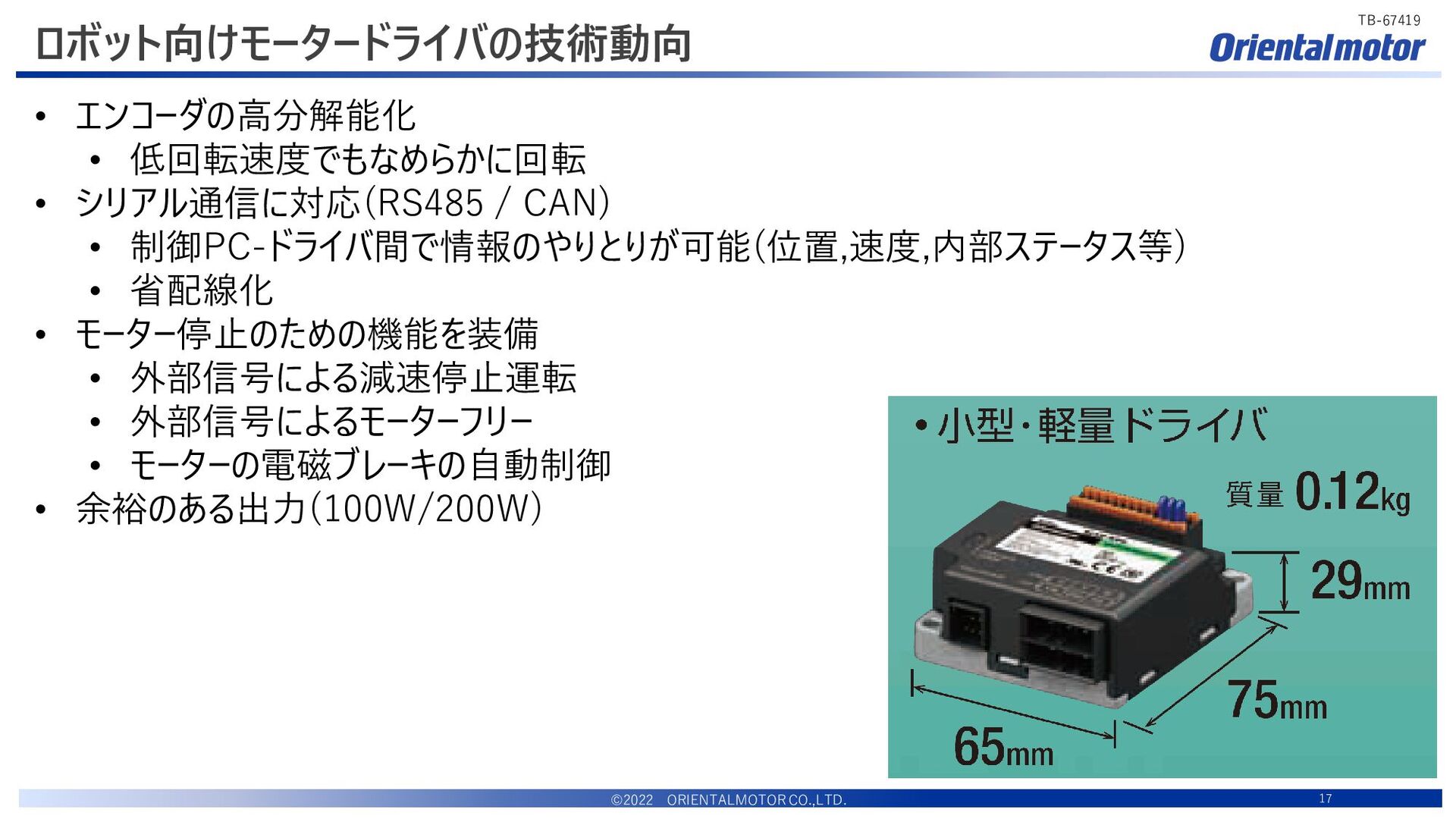
17 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 ロボット向けモータードライバの技術動向 • エンコーダの高分解能化 •
低回転速度でもなめらかに回転 • シリアル通信に対応(RS485 / CAN) • 制御PC-ドライバ間で情報のやりとりが可能(位置,速度,内部ステータス等) • 省配線化 • モーター停止のための機能を装備 • 外部信号による減速停止運転 • 外部信号によるモーターフリー • モーターの電磁ブレーキの自動制御 • 余裕のある出力(100W/200W)
18 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 アクティブ モーター停止のためのドライバ機能 : 減速停止/シャフトフリー
ドライバはロジック入力を4点備える ロジック入力に停止機能を割り当て,停止スイッチを接続する 停止スイッチがアクティブになると,ドライバはモーターを減速させる フリー機能を割り当て,フリースイッチを接続することで, 任意のタイミングでモーターをフリーにできる [ポイント] • 減速停止の動作は,ドライバで完結する. →もし,制御PCがハングアップしても停止可能 • 制御優先度 : 停止入力 > 制御PCからの速度指令 →停止スイッチONにより,確実に,停止動作に移行 • ロボットに応じた減速レートを,事前に設定可能 e.g. 重心が高いロボットは,減速が急すぎると 転倒してしまい,逆に危険 モーター 速度 減速レートは 事前に設定 制御PCからの 速度指令値に追従 制御の 主導権 自律運転中 制御PC ドライバの停止機能 停止 スイッチ 時間 OFF IOコネクタ 停止スイッチ フリースイッチ
19 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 アプリケーション例 : 坂道上での停止 →
手押し移動 → 運転復帰 手押しで移動 =モーターフリー 自律運転再開 ぶつかりそう! 停止スイッチ押下 自律運転中 停止後,位置を保持 =電磁ブレーキをロック 想定するケース: 1)坂道上で停止 → 停止後に保持力が必要 2)オペレータが手押しでロボットを移動 → モーターフリーが必要 3)自律運転を再開 → ドライバの動作ステータス取得が必要
20 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 制御PC モーター ドライバ アプリケーション例:
ブロック図 電磁ブレーキ付き モーター 電源 指令(位置,速度,加減速レートetc…) 状態取得(動作ステータス,位置,速度etc…) 停止入力(B接点) (QSTOP) フリー入力(A接点) (FREE) 停止スイッチ フリースイッチ RS485 or CAN通信
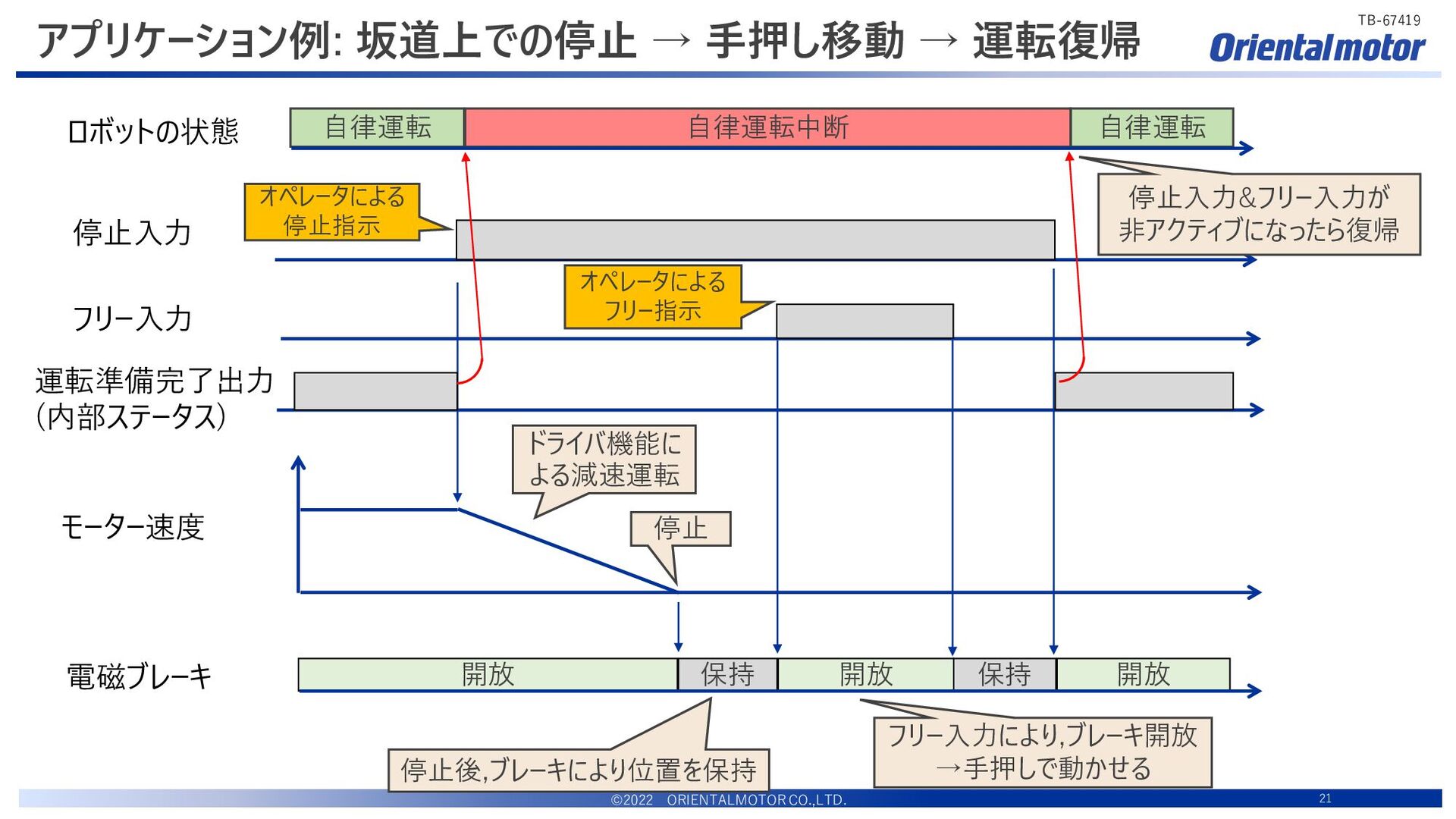
21 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 ロボットの状態 モーター速度 停止入力 電磁ブレーキ
フリー入力 自律運転 自律運転中断 自律運転 運転準備完了出力 (内部ステータス) 停止 ドライバ機能に よる減速運転 停止後,ブレーキにより位置を保持 保持 保持 開放 開放 開放 フリー入力により,ブレーキ開放 →手押しで動かせる オペレータによる 停止指示 停止入力&フリー入力が 非アクティブになったら復帰 アプリケーション例: 坂道上での停止 → 手押し移動 → 運転復帰 オペレータによる フリー指示
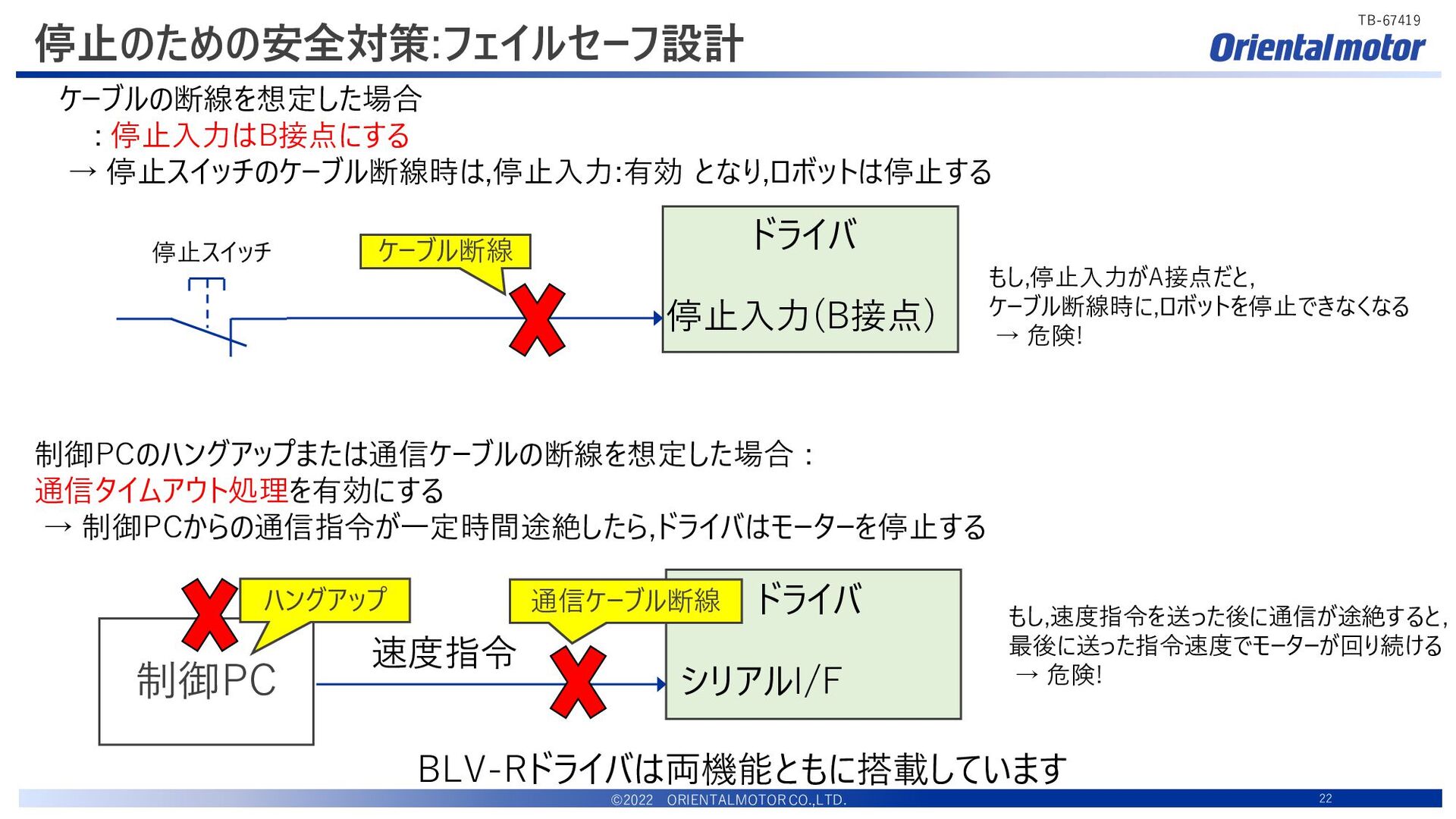
22 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 停止のための安全対策:フェイルセーフ設計 ケーブルの断線を想定した場合 : 停止入力はB接点にする
→ 停止スイッチのケーブル断線時は,停止入力:有効 となり,ロボットは停止する 停止入力(B接点) 停止スイッチ ケーブル断線 ドライバ 制御PCのハングアップまたは通信ケーブルの断線を想定した場合 : 通信タイムアウト処理を有効にする → 制御PCからの通信指令が一定時間途絶したら,ドライバはモーターを停止する もし,停止入力がA接点だと, ケーブル断線時に,ロボットを停止できなくなる → 危険! BLV-Rドライバは両機能ともに搭載しています 制御PC 速度指令 シリアルI/F ドライバ ハングアップ 通信ケーブル断線 もし,速度指令を送った後に通信が途絶すると, 最後に送った指令速度でモーターが回り続ける → 危険!
23 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 まとめ [第一部:理論編] ブラシレスモーターを用いたロボットの停止方法について紹介した. 停止時に発生する回生・インダクタンス起因のエネルギーの処理方法が重要
[第二部:アプリケーション編] 最新のブラシレスモータードライバを用いた,停止の実現方法の紹介を行った • 制御による減速,停止方法 • 坂道での停止→手押しによる移動→自律運転復帰
24 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD.
{kind=link}
![2 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 発表の流れ・概要 [第一部:理論編] ブラシレスモーターを用いた移動ロボットにおける,停止時の動作について •](https://files.speakerdeck.com/presentations/ca85ccc0036644de8b392852e40b332b/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![23 Ver.01.02 ©2022 ORIENTALMOTOR CO.,LTD. TB-67419 まとめ [第一部:理論編] ブラシレスモーターを用いたロボットの停止方法について紹介した. 停止時に発生する回生・インダクタンス起因のエネルギーの処理方法が重要](https://files.speakerdeck.com/presentations/ca85ccc0036644de8b392852e40b332b/slide_22.jpg){kind=link}
{kind=link}