Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ベイズ推論による機械学習入門 4章前半
Search
Takahiro Kawashima
October 01, 2018
Science
670
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ベイズ推論による機械学習入門 4章前半
某所での輪読用資料
須山敦志『ベイズ推論による機械学習入門』4.1節〜4.3節
Takahiro Kawashima
October 01, 2018
More Decks by Takahiro Kawashima
See All by Takahiro Kawashima
論文紹介:HalluCitation Matters
wasyro
0
120
引力・斥力を制御可能なランダム部分集合の確率分布
wasyro
0
420
集合間Bregmanダイバージェンスと置換不変NNによるその学習
wasyro
0
360
論文紹介:Precise Expressions for Random Projections
wasyro
1
640
ガウス過程入門
wasyro
0
1.1k
論文紹介:Inter-domain Gaussian Processes
wasyro
0
210
論文紹介:Proximity Variational Inference (近接性変分推論)
wasyro
0
410
機械学習のための行列式点過程:概説
wasyro
0
2.2k
SOLVE-GP: ガウス過程の新しいスパース変分推論法
wasyro
1
1.6k
Other Decks in Science
See All in Science
フィードフォワードニューラルネットワークを用いた記号入出力制御系に対する制御器設計 / Controller Design for Augmented Systems with Symbolic Inputs and Outputs Using Feedforward Neural Network
konakalab
0
160
俺たちは本当に分かり合えるのか? ~ PdMとスクラムチームの “ずれ” を科学する
bonotake
2
2.5k
(2025) Balade en cyclotomie
mansuy
0
640
Conwayの法則を"ちゃんと"使うために — 原典でConwayは何を言っていたのか
bonotake
9
5.2k
AkarengaLT vol.40
hashimoto_kei
0
110
Distributional Regression
tackyas
0
550
医療 LLM ベンチマークの現在地:多面的評価 と日本ローカライズ
analokmaus
1
580
サンプル対応のない複数遺伝子発現プロファイルに対するテンソル分解型統合解析の要約
tagtag
PRO
0
210
データベース04: SQL (1/3) 単純質問 & 集約演算
trycycle
PRO
0
1.5k
データベース03: 関係データモデル
trycycle
PRO
1
590
Tensor Factorization Meets Deformed Information Geometry: Convex Relaxation under Deformed Algebra
gkazunii
0
110
イロレーティングを活用した関東大学サッカーの定量的実力評価 / A quantitative performance evaluation of Kanto University Football Association using Elo rating
konakalab
0
300
Featured
See All Featured
Un-Boring Meetings
codingconduct
0
340
Building Applications with DynamoDB
mza
96
7.1k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.6k
The Cost Of JavaScript in 2023
addyosmani
55
10k
Believing is Seeing
oripsolob
1
170
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
600
How to train your dragon (web standard)
notwaldorf
97
6.7k
Building the Perfect Custom Keyboard
takai
2
810
Optimizing for Happiness
mojombo
378
71k
Building Adaptive Systems
keathley
44
3.1k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
3.7k
A Tale of Four Properties
chriscoyier
163
24k
Transcript
ਢࢁຊ 4 ষલ ౡوେ October 1, 2018 ిؾ௨৴େֶ 4
࣍ 1. ࠞ߹Ϟσϧͱࣄޙͷਪ 2. ֬ͷۙࣅख๏ 3. ϙΞιϯࠞ߹Ϟσϧʹ͓͚Δਪ 2
ࠞ߹Ϟσϧͱࣄޙͷਪ
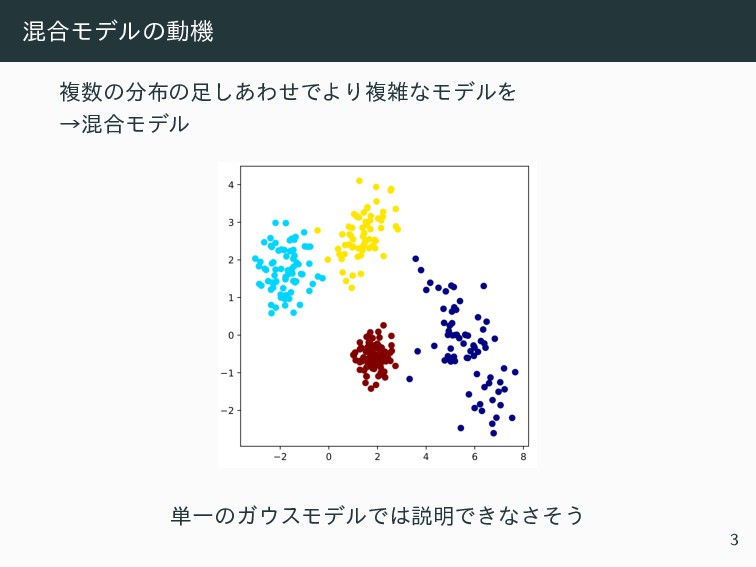
ࠞ߹Ϟσϧͷಈػ ෳͷͷ͋͠ΘͤͰΑΓෳࡶͳϞσϧΛ ˠࠞ߹Ϟσϧ ୯ҰͷΨεϞσϧͰઆ໌Ͱ͖ͳͦ͞͏ 3
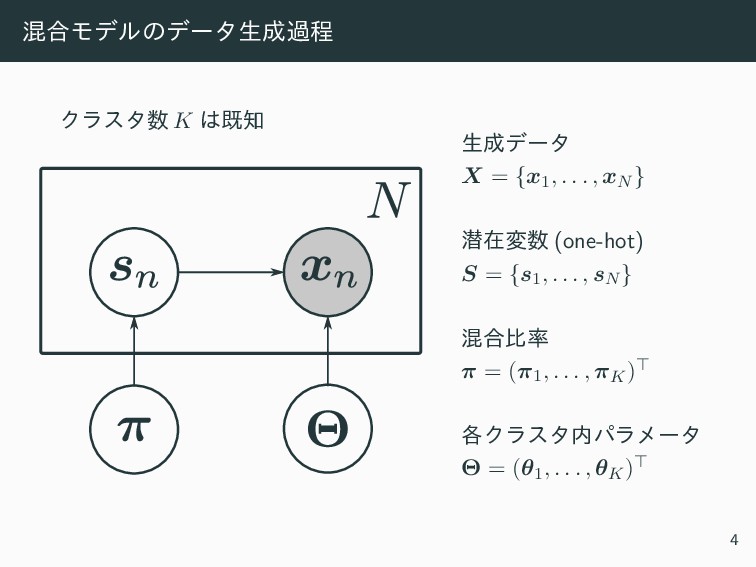
ࠞ߹Ϟσϧͷσʔλੜաఔ Ϋϥελ K ط ੜσʔλ X = {x1, . .
. , xN } જࡏม (one-hot) S = {s1, . . . , sN } ࠞ߹ൺ π = (π1, . . . , πK)⊤ ֤Ϋϥελύϥϝʔλ Θ = (θ1, . . . , θK)⊤ 4
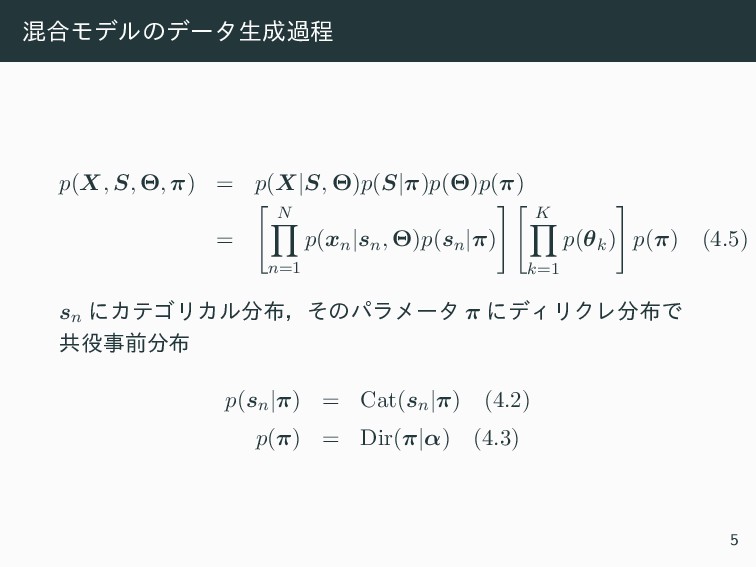
ࠞ߹Ϟσϧͷσʔλੜաఔ p(X, S, Θ, π) = p(X|S, Θ)p(S|π)p(Θ)p(π) = [
N ∏ n=1 p(xn|sn, Θ)p(sn|π) ] [ K ∏ k=1 p(θk) ] p(π) (4.5) sn ʹΧςΰϦΧϧɼͦͷύϥϝʔλ π ʹσΟϦΫϨͰ ڞࣄલ p(sn|π) = Cat(sn|π) (4.2) p(π) = Dir(π|α) (4.3) 5
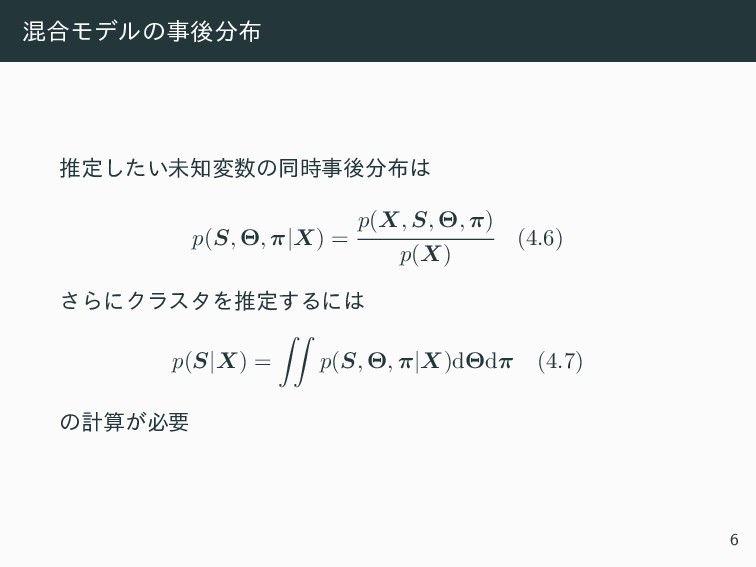
ࠞ߹Ϟσϧͷࣄޙ ਪఆ͍ͨ͠ະมͷಉ࣌ࣄޙ p(S, Θ, π|X) = p(X, S, Θ, π)
p(X) (4.6) ͞ΒʹΫϥελΛਪఆ͢Δʹ p(S|X) = ∫∫ p(S, Θ, π|X)dΘdπ (4.7) ͷܭࢉ͕ඞཁ 6
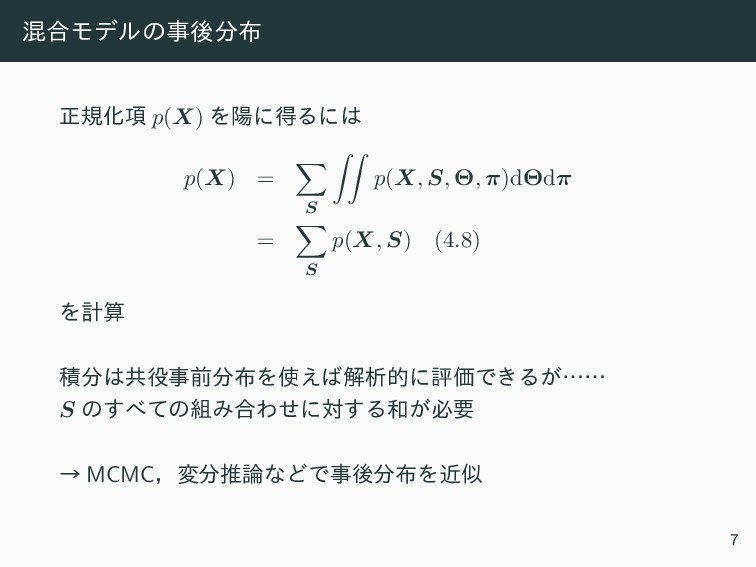
ࠞ߹Ϟσϧͷࣄޙ ਖ਼نԽ߲ p(X) ΛཅʹಘΔʹ p(X) = ∑ S ∫∫ p(X,
S, Θ, π)dΘdπ = ∑ S p(X, S) (4.8) Λܭࢉ ੵڞࣄલΛ͑ղੳతʹධՁͰ͖Δ͕ʜʜ S ͷͯ͢ͷΈ߹Θͤʹର͢Δ͕ඞཁ ˠ MCMCɼมਪͳͲͰࣄޙΛۙࣅ 7
֬ͷۙࣅख๏
ΪϒεαϯϓϦϯά ѻ͍ͮΒ͍֬ p(z1, z2, z3) ͷ౷ܭྔΛಘ͍ͨ ˠ MCMC(Markov chain Monte
Carlo) Ͱ p(z1, z2, z3) ͔Βαϯϓ Ϧϯά ΪϒεαϯϓϦϯά ҎԼͷ full conditional ͔Β܁Γฦ͠αϯϓϦϯάͯ͠ p(z1, z2, z3) ͔ΒͷαϯϓϦϯάܥྻΛಘΔ z(i) 1 ∼ p(z1|z(i−1) 2 , z(i−1) 3 ) z(i) 2 ∼ p(z2|z(i) 1 , z(i−1) 3 ) (4.10) z(i) 3 ∼ p(z3|z(i) 1 , z(i) 2 ) 8
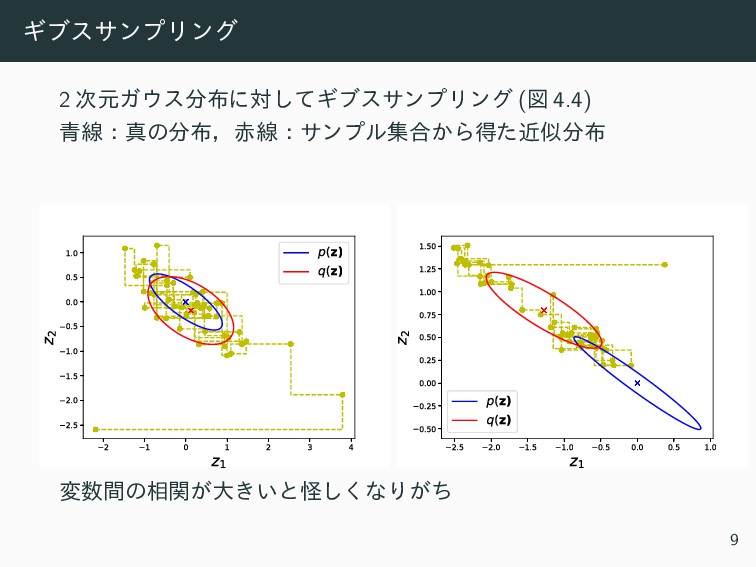
ΪϒεαϯϓϦϯά 2 ࣍ݩΨεʹରͯ͠ΪϒεαϯϓϦϯά (ਤ 4.4) ੨ઢɿਅͷɼઢɿαϯϓϧू߹͔Βಘͨۙࣅ 2 1 0 1
2 3 4 z1 2.5 2.0 1.5 1.0 0.5 0.0 0.5 1.0 z2 p(z) q(z) 2.5 2.0 1.5 1.0 0.5 0.0 0.5 1.0 z1 0.50 0.25 0.00 0.25 0.50 0.75 1.00 1.25 1.50 z2 p(z) q(z) มؒͷ૬͕ؔେ͖͍ͱո͘͠ͳΓ͕ͪ 9
ൃలख๏ 1ɿϒϩοΩϯάΪϒεαϯϓϦϯά ϒϩοΩϯάΪϒεαϯϓϦϯά z2, z3 ͷಉ࣌Λ༻͍ͯΪϒεαϯϓϦϯά z(i) 1 ∼ p(z1|z(i−1)
2 , z(i−1) 3 ) z(i) 2 , z(i) 3 ∼ p(z2, z3|z(i) 1 ) (4.11) • z2 ͱ z3 ͷ૬͕ؔڧͯ͘͏·͍͖͍͘͢ • p(z2, z3|z(i)) ͔ΒαϯϓϦϯά͍͢͠ඞཁ 10
ൃలख๏ 2ɿ่յܕΪϒεαϯϓϦϯά ่յܕΪϒεαϯϓϦϯά z3 ΛपลԽআڈޙɼp(z1, z2) ͔ΒΪϒεαϯϓϦϯά p(z1, z2) =
∫ p(z1, z2, z3)dz3 (4.12) z(i) 1 ∼ p(z1|z(i−1) 2 ) z(i) 2 ∼ p(z2|z(i) 1 ) (4.13) • ߴԽ͕ݟࠐΊΔ • पล͕ղੳతʹٻ·Δඞཁ • Γͷม͕αϯϓϦϯά͍͢͠ܗࣜͰ͋Δඞཁ 11
มਪ ֬ p(z1, z2, z3) Λѻ͍͍ۙ͢ࣅ q(z1, z2, z3) Ͱදݱ
ˠ KL ڑ࠷খԽ qopt.(z1, z2, z3) = arg min q KL[q(z1, z2, z3)∥p(z1, z2, z3)] (4.14) มਪ q ͷදݱೳྗΛݶఆͯ͠ KL ڑΛ࠷খԽ 12
มਪ ฏۉۙࣅ ֤֬มʹಠཱੑΛԾఆ p(z1, z2, z3) ≈ q(z1)q(z2)q(z3) (4.15) q(z1),
q(z2), q(z3) Λ KL ڑ͕খ͘͞ͳΔΑ͏ஞ࣍తʹमਖ਼ Notation ⟨·⟩q(z1)q(z2)q(z3) = ⟨·⟩1,2,3 13
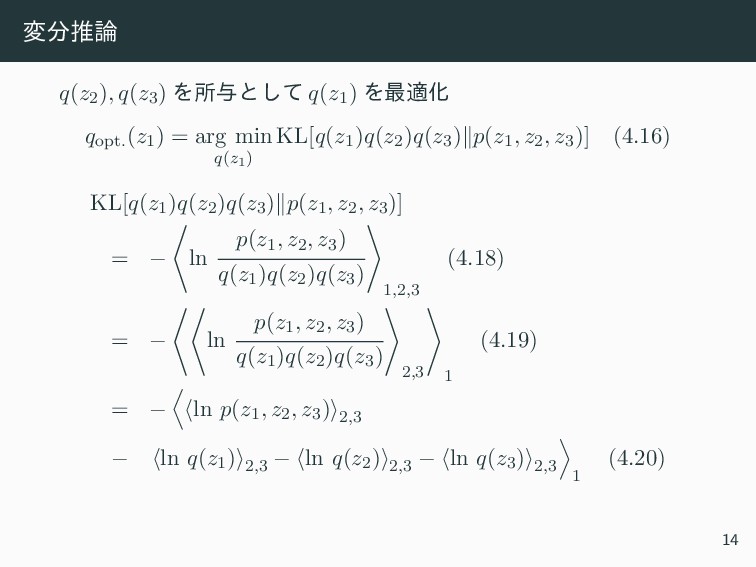
มਪ q(z2), q(z3) Λॴ༩ͱͯ͠ q(z1) Λ࠷దԽ qopt.(z1) = arg min
q(z1) KL[q(z1)q(z2)q(z3)∥p(z1, z2, z3)] (4.16) KL[q(z1)q(z2)q(z3)∥p(z1, z2, z3)] = − ⟨ ln p(z1, z2, z3) q(z1)q(z2)q(z3) ⟩ 1,2,3 (4.18) = − ⟨⟨ ln p(z1, z2, z3) q(z1)q(z2)q(z3) ⟩ 2,3 ⟩ 1 (4.19) = − ⟨ ⟨ln p(z1, z2, z3)⟩2,3 − ⟨ln q(z1)⟩2,3 − ⟨ln q(z2)⟩2,3 − ⟨ln q(z3)⟩2,3 ⟩ 1 (4.20) 14
มਪ ⟨ln q(z1)⟩2,3 = ln q(z1)ɼq(z1) ͱແؔͳ෦Λఆʹཧ = − ⟨⟨ln
p(z1, z2, z3)⟩2,3 − ln q(z1)⟩ 1 + const. (4.21) = − ⟨ln [exp(⟨ln p(z1, z2, z3)⟩2,3)] − ln q(z1)⟩ 1 + const. = − ⟨ ln exp(⟨ln p(z1, z2, z3)⟩2,3) ln q(z1) ⟩ 1 + const. (4.22) = KL[q(z1)∥exp{⟨ln p(z1, z2, z3)⟩2,3}] + const. (4.23) ࠷ऴతʹࣜ (4.23) ͷ࠷খ ln q(z1) = ⟨ln p(z1, z2, z3)⟩q(z2)q(z3) + const. (4.24) ͰಘΒΕΔ (q(z2), q(z3) ʹ͍ͭͯಉ༷) 15
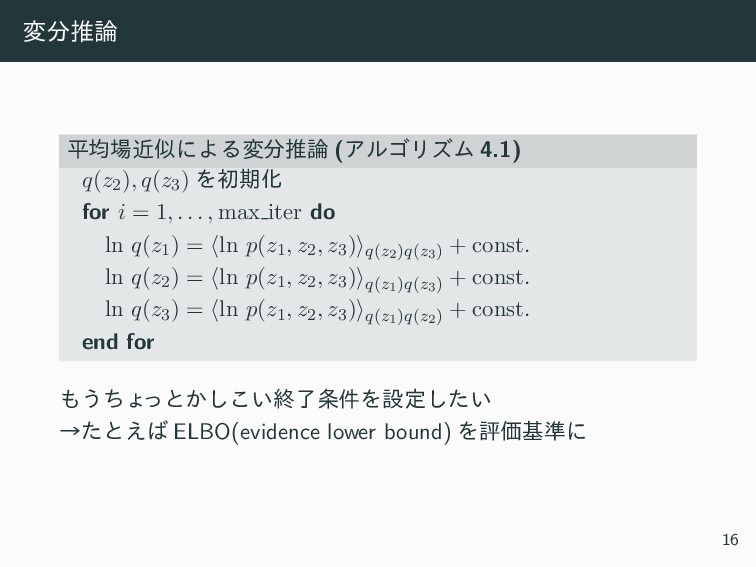
มਪ ฏۉۙࣅʹΑΔมਪ (ΞϧΰϦζϜ 4.1) q(z2), q(z3) ΛॳظԽ for i =
1, . . . , max iter do ln q(z1) = ⟨ln p(z1, z2, z3)⟩q(z2)q(z3) + const. ln q(z2) = ⟨ln p(z1, z2, z3)⟩q(z1)q(z3) + const. ln q(z3) = ⟨ln p(z1, z2, z3)⟩q(z1)q(z2) + const. end for ͏ͪΐ ͬͱ͔͍͜͠ऴྃ݅Λઃఆ͍ͨ͠ ˠͨͱ͑ ELBO(evidence lower bound) ΛධՁج४ʹ 16
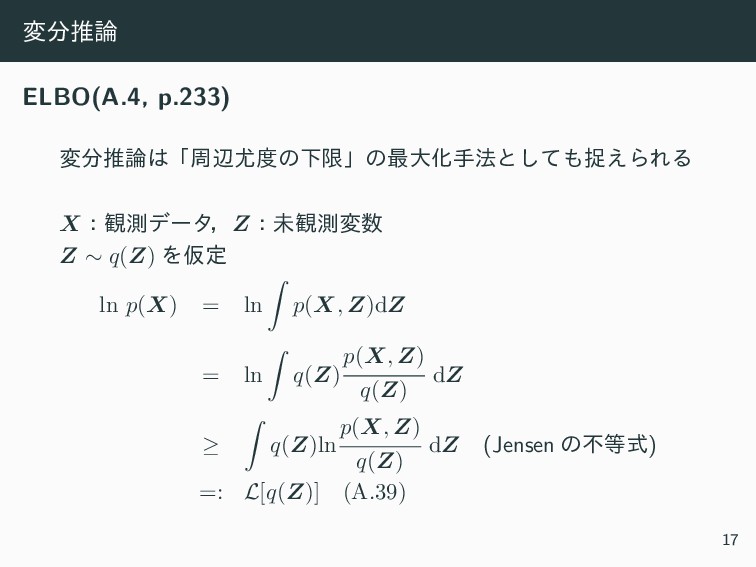
มਪ ELBO(A.4, p.233) มਪʮपลͷԼݶʯͷ࠷େԽख๏ͱͯ͠ଊ͑ΒΕΔ Xɿ؍ଌσʔλɼZɿະ؍ଌม Z ∼ q(Z) ΛԾఆ ln
p(X) = ln ∫ p(X, Z)dZ = ln ∫ q(Z) p(X, Z) q(Z) dZ ≥ ∫ q(Z)ln p(X, Z) q(Z) dZ (Jensen ͷෆࣜ) =: L[q(Z)] (A.39) 17
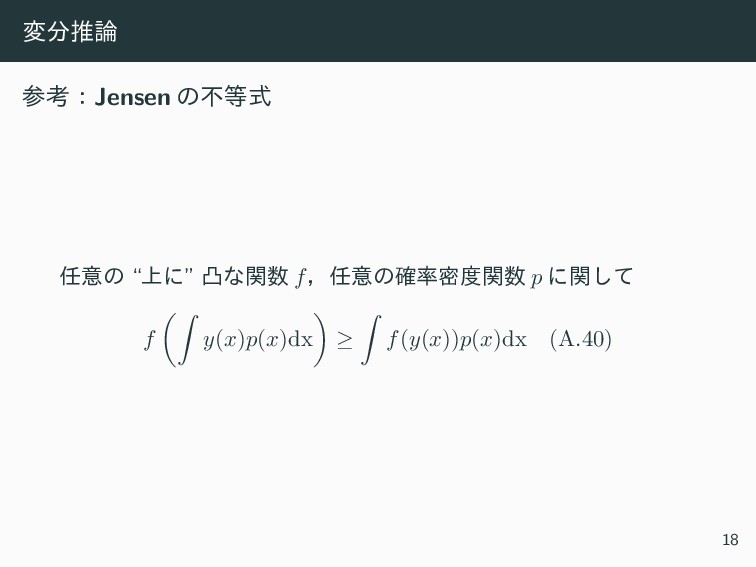
มਪ ࢀߟɿJensen ͷෆࣜ ҙͷ “্ʹ” ತͳؔ fɼҙͷ֬ີؔ p ʹؔͯ͠ f
(∫ y(x)p(x)dx ) ≥ ∫ f(y(x))p(x)dx (A.40) 18
มਪ ELBO(A.4, p.233) पลͷԼݶ L[q(Z)] Λ q(Z) ͷ ELBO ͱΑͿ
ରपลͱ ELBO ͱͷࠩ q(Z) ͱ p(Z|X) ͱͷ KL ڑʹ ͍͠ KL[q(Z)∥p(Z|X)] = ∫ q(Z)ln q(Z) p(Z|X) dZ = ∫ q(Z)ln q(Z)p(X) p(X, Z) dZ = p(X) − ∫ q(Z)ln p(X, Z) q(Z) dZ = p(X) − L[q(Z)] (A.41) 19
มਪ ELBO(A.4, p.233) KL[q(Z)∥p(Z|X)] = p(X) − L[q(Z)] (A.41) ln
p(X) σʔλͱϞσϧॴ༩ͷͱఆ ˠ q(Z) ʹؔ͢Δ KL ڑ࠷খԽͱରपลͷԼݶ L[q(Z)] ͷ ࠷େԽՁ ELBO ͷมԽ͕ఆ ϵ ΑΓখ͘͞ͳͬͨͱ͖ʹมਪΞϧΰ ϦζϜΛࢭΊΔ 20
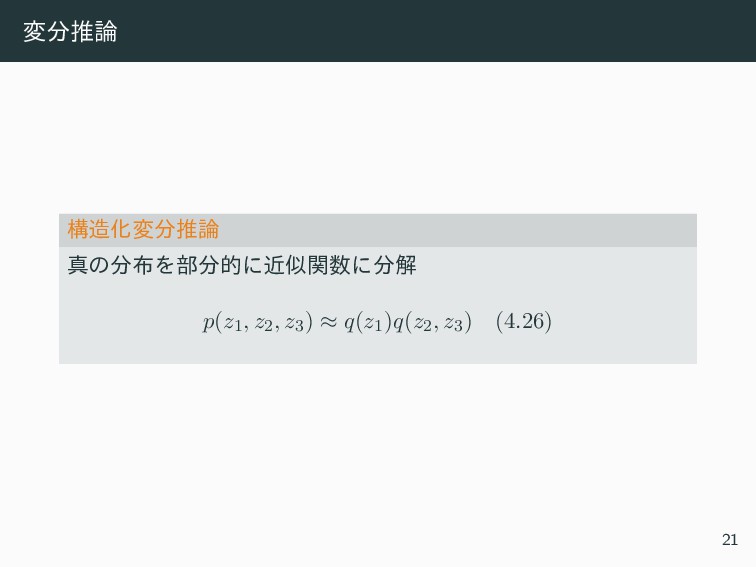
มਪ ߏԽมਪ ਅͷΛ෦తʹۙࣅؔʹղ p(z1, z2, z3) ≈ q(z1)q(z2, z3) (4.26)
21
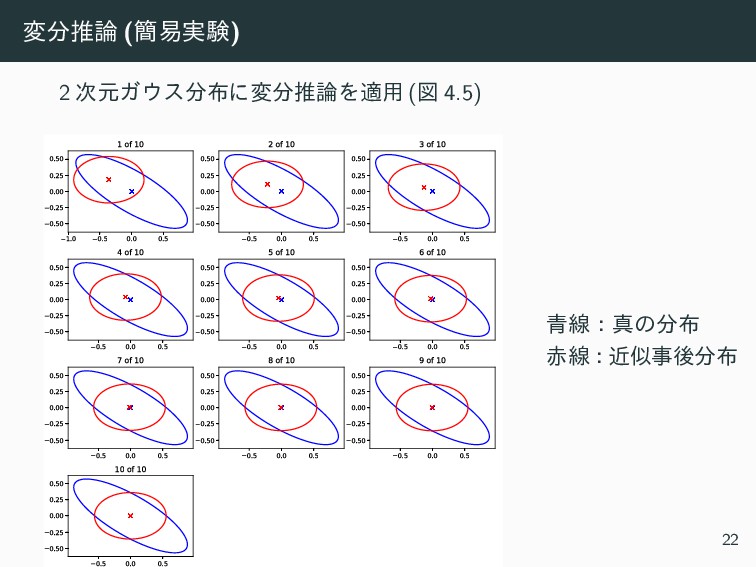
มਪ (؆қ࣮ݧ) 2 ࣍ݩΨεʹมਪΛద༻ (ਤ 4.5) 1.0 0.5 0.0 0.5
0.50 0.25 0.00 0.25 0.50 1 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 2 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 3 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 4 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 5 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 6 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 7 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 8 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 9 of 10 0.5 0.0 0.5 0.50 0.25 0.00 0.25 0.50 10 of 10 ੨ઢɿਅͷ ઢɿۙࣅࣄޙ 22
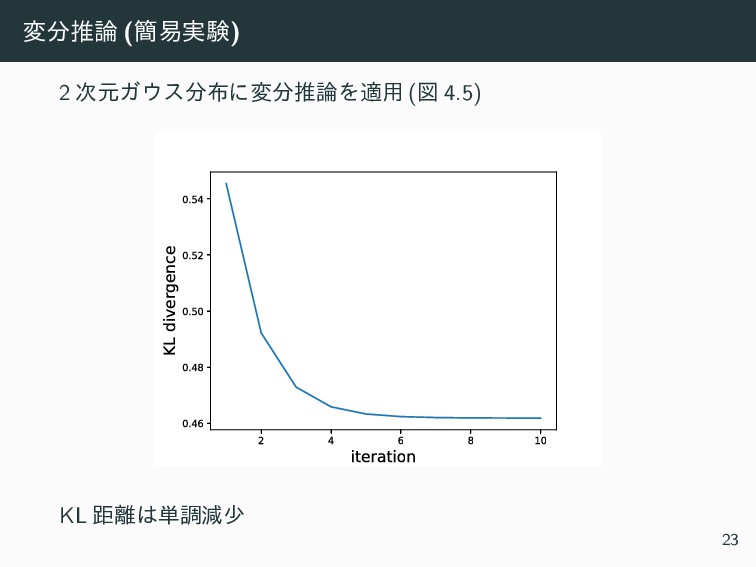
มਪ (؆қ࣮ݧ) 2 ࣍ݩΨεʹมਪΛద༻ (ਤ 4.5) 2 4 6 8
10 iteration 0.46 0.48 0.50 0.52 0.54 KL divergence KL ڑ୯ௐݮগ 23
มਪ (؆қ࣮ݧ) 2 ࣍ݩΨεʹมਪΛద༻ (ਤ 4.5) • ͍ • ΠςϨʔγϣϯ͝ͱʹ
KL ڑ͕୯ௐݮগ • ڧ͍૬ؔΛଊ͑ΒΕͳ͍ 24
ϙΞιϯࠞ߹Ϟσϧʹ͓͚Δਪ
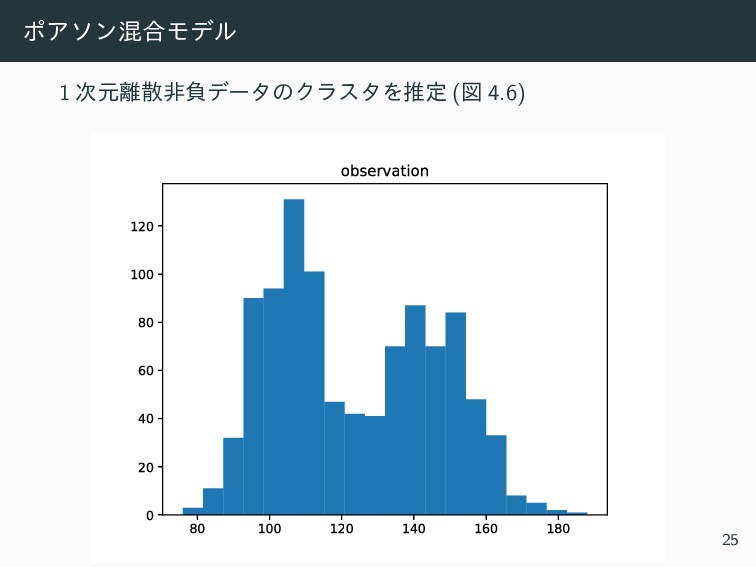
ϙΞιϯࠞ߹Ϟσϧ 1 ࣍ݩࢄඇෛσʔλͷΫϥελΛਪఆ (ਤ 4.6) 80 100 120 140 160
180 0 20 40 60 80 100 120 observation 25
ϙΞιϯࠞ߹Ϟσϧ p(xn|λk) = Poi(xn|λk) (4.27) ΑΓ p(xn|sn, λ) = K
∏ k=1 Poi(xn|λk)sn,k (4.28) λk ͷڞࣄલ p(λk) = Gamma(λk|a, b) (4.29) 26
ΪϒεαϯϓϦϯά ࠞ߹ͰજࡏมͱύϥϝʔλΛ͚ͯαϯϓϧ͢ΔͱΑ͍ S ∼ p(S|X, λ, π) (4.31) λ, π
∼ p(λ, π|X, S) (4.32) ม S ͷΈʹண p(S|X, λ, π) ∝ p(X|S, λ)p(S|π) = N ∏ n=1 p(xn|sn, λ)p(sn|π) (4.33) 27
ΪϒεαϯϓϦϯά p(xn|sn, λ), p(sn|π) ΛͦΕͧΕܭࢉ͢Δͱɼ࠷ऴతʹ sn ∼ Cat(sn|ηn ) (4.37)
ͨͩ͠ ηn,k ∼ exp{xnln λk − λk + ln πk} ( s.t. K ∑ k=1 ηn,k = 1 ) (4.38) ͕ಘΒΕΔ 28
ΪϒεαϯϓϦϯά p(λ, π|X, S) ∝ p(X, S, λ, π) =
p(X|S, λ)p(S|π)p(λ)p(π) (4.39) ˠ λ ͱ π ͷࣄޙಠཱ λ ʹؔͷ͋Δͱ͜Ζʹ͚ͩ p(λ|X, S) ∝ p(X|S, λ)p(λ) 29
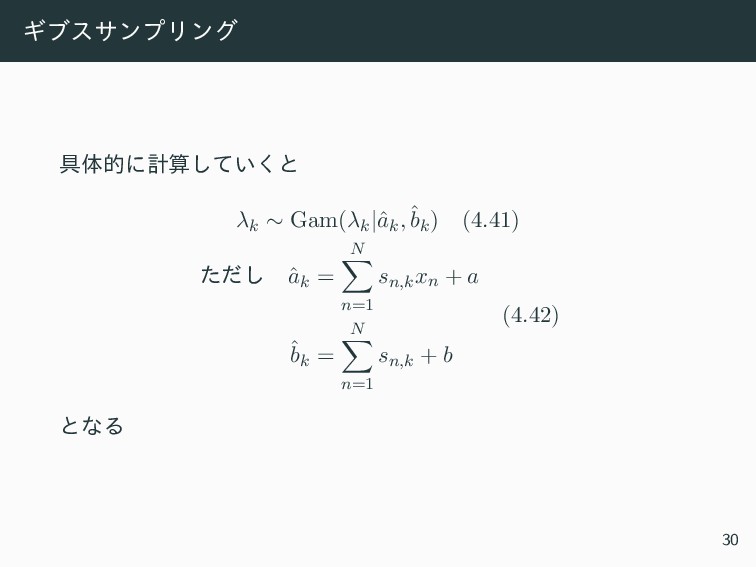
ΪϒεαϯϓϦϯά ۩ମతʹܭࢉ͍ͯ͘͠ͱ λk ∼ Gam(λk|ˆ ak,ˆ bk) (4.41) ͨͩ͠ ˆ
ak = N ∑ n=1 sn,kxn + a ˆ bk = N ∑ n=1 sn,k + b (4.42) ͱͳΔ 30
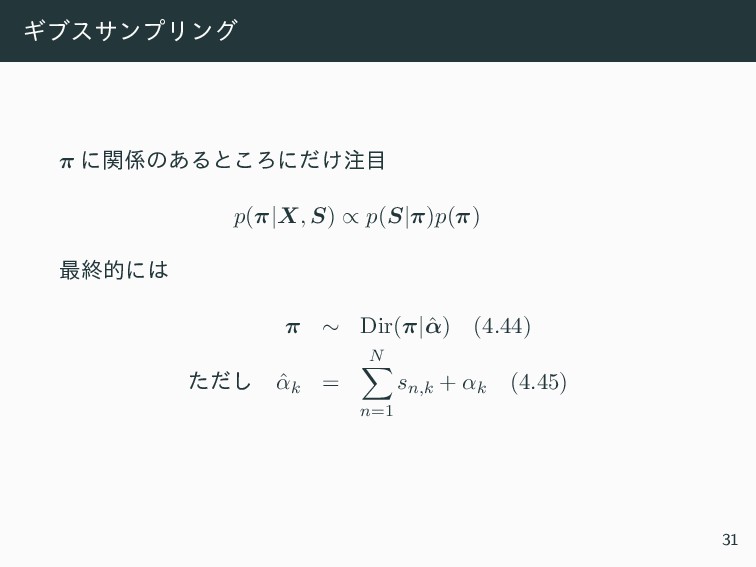
ΪϒεαϯϓϦϯά π ʹؔͷ͋Δͱ͜Ζʹ͚ͩ p(π|X, S) ∝ p(S|π)p(π) ࠷ऴతʹ π ∼
Dir(π|ˆ α) (4.44) ͨͩ͠ ˆ αk = N ∑ n=1 sn,k + αk (4.45) 31
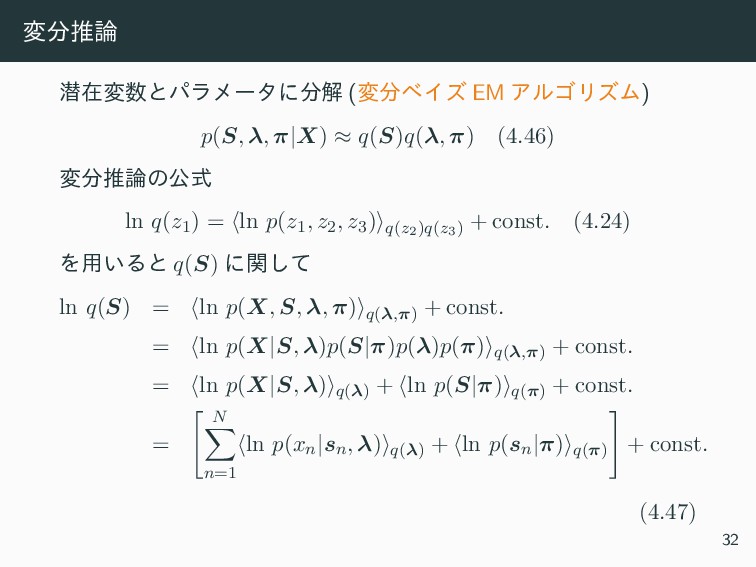
มਪ જࡏมͱύϥϝʔλʹղ (มϕΠζ EM ΞϧΰϦζϜ) p(S, λ, π|X) ≈ q(S)q(λ,
π) (4.46) มਪͷެࣜ ln q(z1) = ⟨ln p(z1, z2, z3)⟩q(z2)q(z3) + const. (4.24) Λ༻͍Δͱ q(S) ʹؔͯ͠ ln q(S) = ⟨ln p(X, S, λ, π)⟩q(λ,π) + const. = ⟨ln p(X|S, λ)p(S|π)p(λ)p(π)⟩q(λ,π) + const. = ⟨ln p(X|S, λ)⟩q(λ) + ⟨ln p(S|π)⟩q(π) + const. = [ N ∑ n=1 ⟨ln p(xn|sn, λ)⟩q(λ) + ⟨ln p(sn|π)⟩q(π) ] + const. (4.47) 32
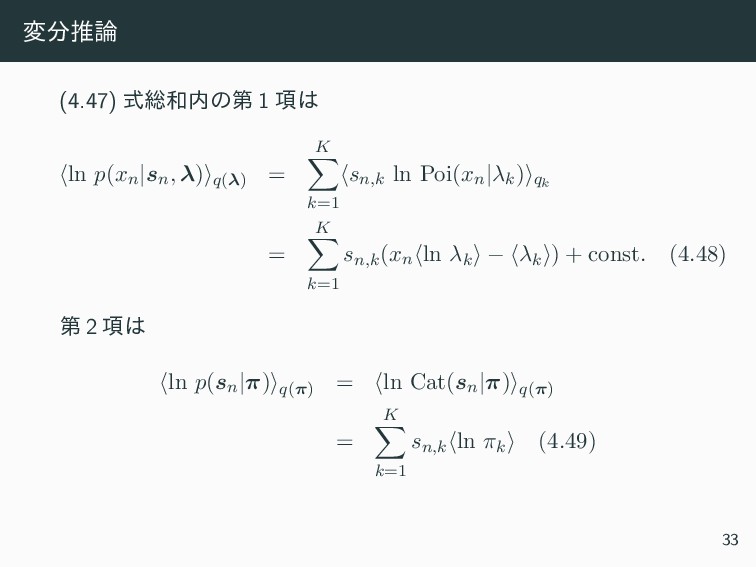
มਪ (4.47) ࣜ૯ͷୈ 1 ߲ ⟨ln p(xn|sn, λ)⟩q(λ) = K
∑ k=1 ⟨sn,k ln Poi(xn|λk)⟩qk = K ∑ k=1 sn,k(xn⟨ln λk⟩ − ⟨λk⟩) + const. (4.48) ୈ 2 ߲ ⟨ln p(sn|π)⟩q(π) = ⟨ln Cat(sn|π)⟩q(π) = K ∑ k=1 sn,k⟨ln πk⟩ (4.49) 33
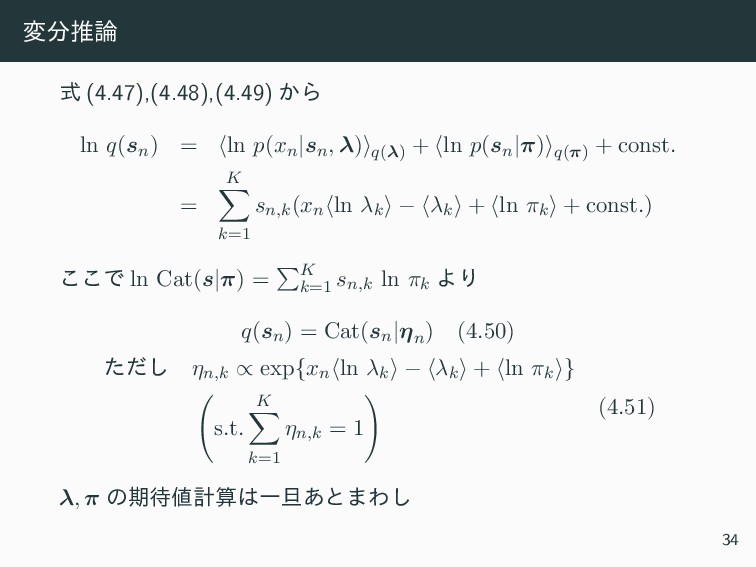
มਪ ࣜ (4.47),(4.48),(4.49) ͔Β ln q(sn) = ⟨ln p(xn|sn, λ)⟩q(λ)
+ ⟨ln p(sn|π)⟩q(π) + const. = K ∑ k=1 sn,k(xn⟨ln λk⟩ − ⟨λk⟩ + ⟨ln πk⟩ + const.) ͜͜Ͱ ln Cat(s|π) = ∑ K k=1 sn,k ln πk ΑΓ q(sn) = Cat(sn|ηn ) (4.50) ͨͩ͠ ηn,k ∝ exp{xn⟨ln λk⟩ − ⟨λk⟩ + ⟨ln πk⟩} ( s.t. K ∑ k=1 ηn,k = 1 ) (4.51) λ, π ͷظܭࢉҰ୴͋ͱ·Θ͠ 34
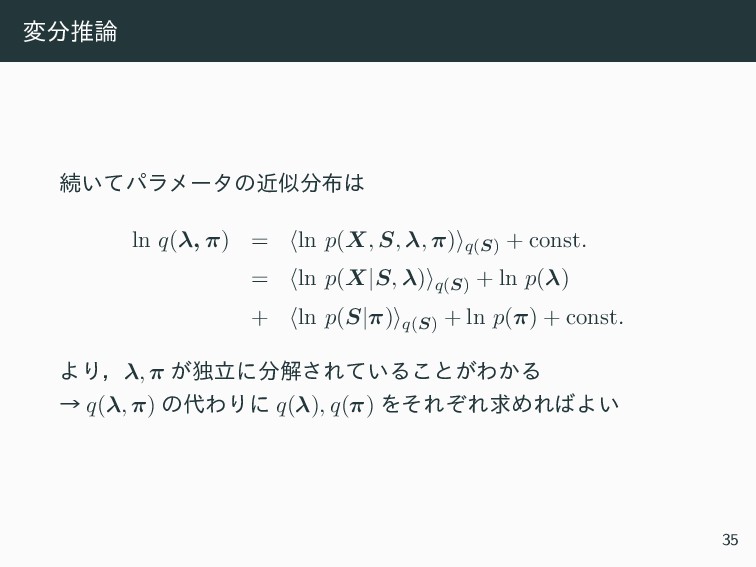
มਪ ଓ͍ͯύϥϝʔλͷۙࣅ ln q(λ, π) = ⟨ln p(X, S, λ,
π)⟩q(S) + const. = ⟨ln p(X|S, λ)⟩q(S) + ln p(λ) + ⟨ln p(S|π)⟩q(S) + ln p(π) + const. ΑΓɼλ, π ͕ಠཱʹղ͞Ε͍ͯΔ͜ͱ͕Θ͔Δ ˠ q(λ, π) ͷΘΓʹ q(λ), q(π) ΛͦΕͧΕٻΊΕΑ͍ 35
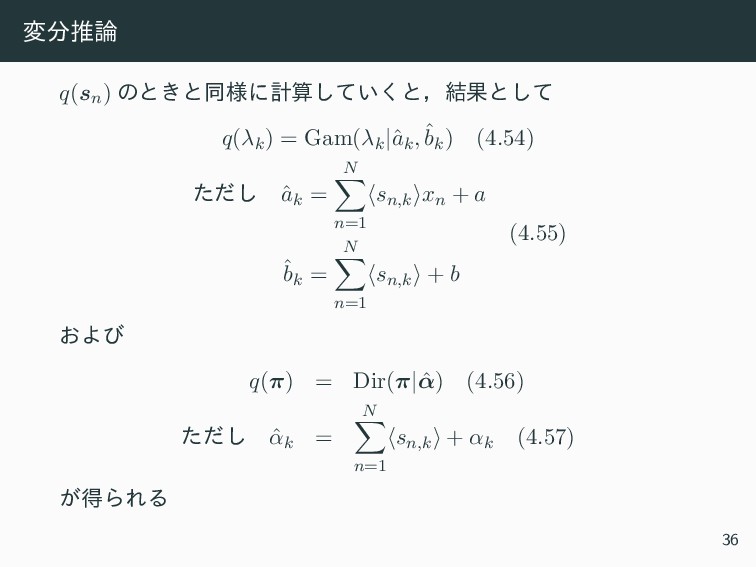
มਪ q(sn) ͷͱ͖ͱಉ༷ʹܭࢉ͍ͯ͘͠ͱɼ݁Ռͱͯ͠ q(λk) = Gam(λk|ˆ ak,ˆ bk) (4.54) ͨͩ͠
ˆ ak = N ∑ n=1 ⟨sn,k⟩xn + a ˆ bk = N ∑ n=1 ⟨sn,k⟩ + b (4.55) ͓Αͼ q(π) = Dir(π|ˆ α) (4.56) ͨͩ͠ ˆ αk = N ∑ n=1 ⟨sn,k⟩ + αk (4.57) ͕ಘΒΕΔ 36
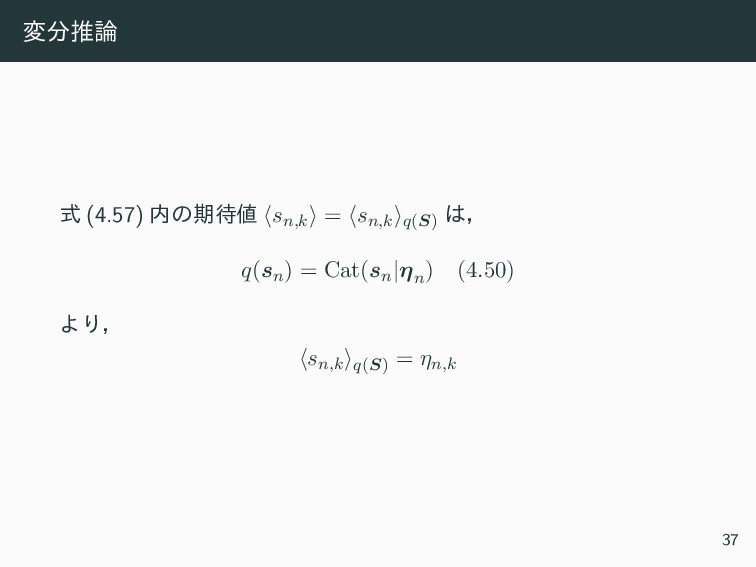
มਪ ࣜ (4.57) ͷظ ⟨sn,k⟩ = ⟨sn,k⟩q(S) ɼ q(sn) =
Cat(sn|ηn ) (4.50) ΑΓɼ ⟨sn,k⟩q(S) = ηn,k 37
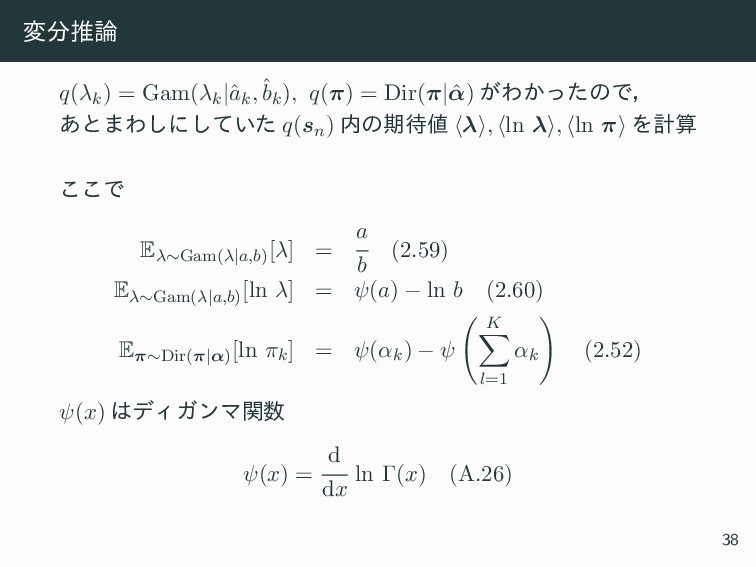
มਪ q(λk) = Gam(λk|ˆ ak,ˆ bk), q(π) = Dir(π|ˆ α)
͕Θ͔ͬͨͷͰɼ ͋ͱ·Θ͠ʹ͍ͯͨ͠ q(sn) ͷظ ⟨λ⟩, ⟨ln λ⟩, ⟨ln π⟩ Λܭࢉ ͜͜Ͱ Eλ∼Gam(λ|a,b) [λ] = a b (2.59) Eλ∼Gam(λ|a,b) [ln λ] = ψ(a) − ln b (2.60) Eπ∼Dir(π|α) [ln πk] = ψ(αk) − ψ ( K ∑ l=1 αk ) (2.52) ψ(x) σΟΨϯϚؔ ψ(x) = d dx ln Γ(x) (A.26) 38
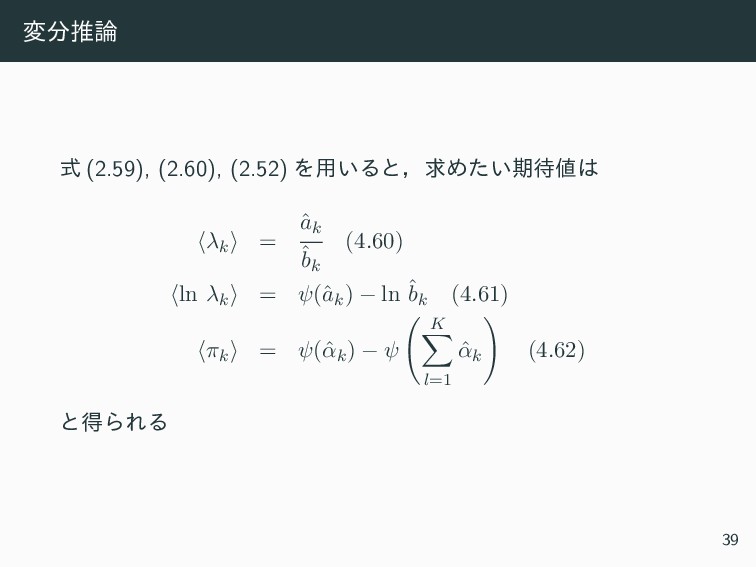
มਪ ࣜ (2.59), (2.60), (2.52) Λ༻͍ΔͱɼٻΊ͍ͨظ ⟨λk⟩ = ˆ ak
ˆ bk (4.60) ⟨ln λk⟩ = ψ(ˆ ak) − ln ˆ bk (4.61) ⟨πk⟩ = ψ(ˆ αk) − ψ ( K ∑ l=1 ˆ αk ) (4.62) ͱಘΒΕΔ 39
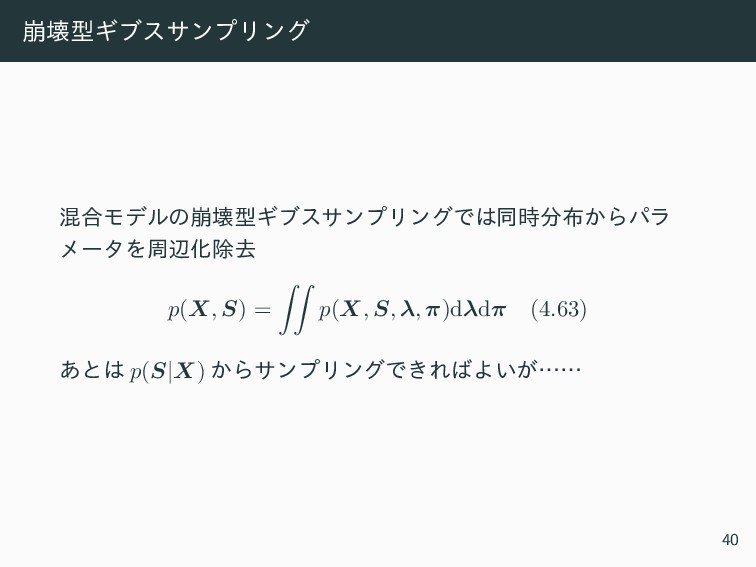
่յܕΪϒεαϯϓϦϯά ࠞ߹Ϟσϧͷ่յܕΪϒεαϯϓϦϯάͰಉ͔࣌Βύϥ ϝʔλΛपลԽআڈ p(X, S) = ∫∫ p(X, S, λ,
π)dλdπ (4.63) ͋ͱ p(S|X) ͔ΒαϯϓϦϯάͰ͖ΕΑ͍͕ʜʜ 40
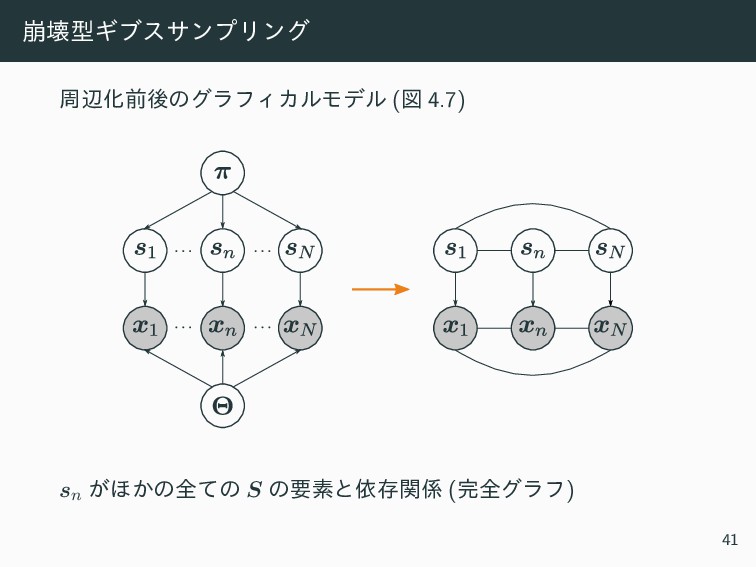
่յܕΪϒεαϯϓϦϯά पลԽલޙͷάϥϑΟΧϧϞσϧ (ਤ 4.7) sn ͕΄͔ͷશͯͷ S ͷཁૉͱґଘؔ (શάϥϑ) 41
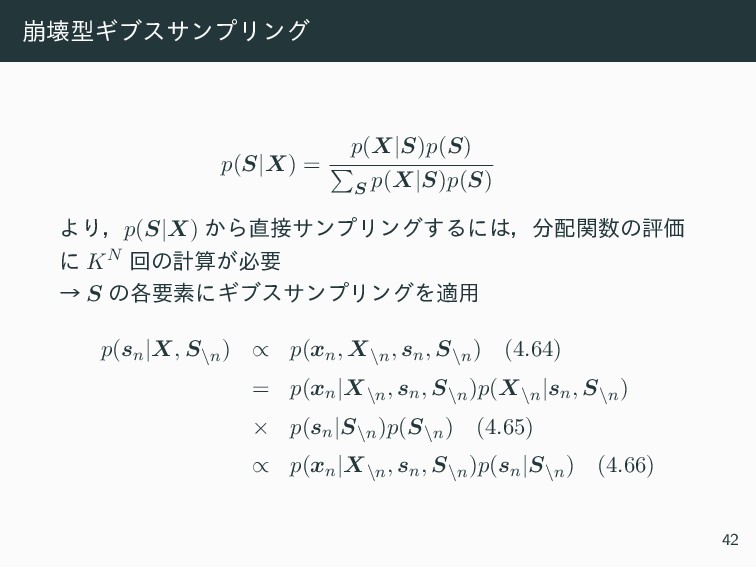
่յܕΪϒεαϯϓϦϯά p(S|X) = p(X|S)p(S) ∑ S p(X|S)p(S) ΑΓɼp(S|X) ͔ΒαϯϓϦϯά͢ΔʹɼؔͷධՁ ʹ
KN ճͷܭࢉ͕ඞཁ ˠ S ͷ֤ཁૉʹΪϒεαϯϓϦϯάΛద༻ p(sn|X, S\n ) ∝ p(xn, X\n , sn, S\n ) (4.64) = p(xn|X\n , sn, S\n )p(X\n |sn, S\n ) × p(sn|S\n )p(S\n ) (4.65) ∝ p(xn|X\n , sn, S\n )p(sn|S\n ) (4.66) 42
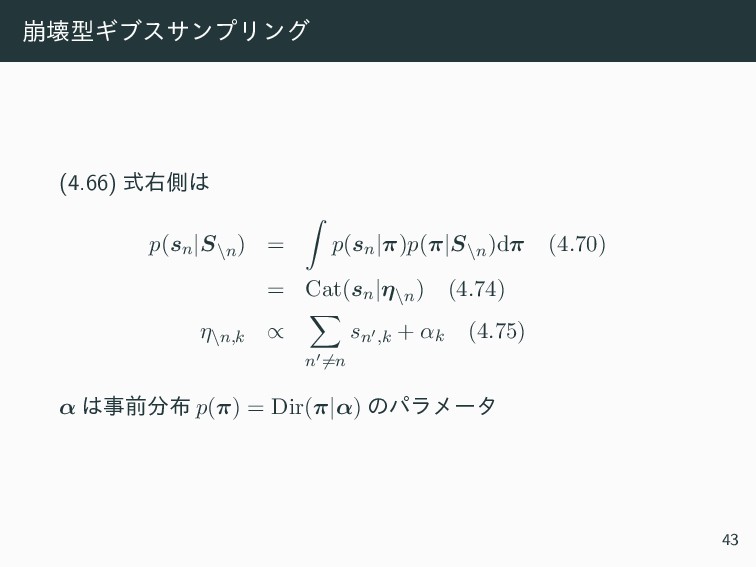
่յܕΪϒεαϯϓϦϯά (4.66) ࣜӈଆ p(sn|S\n ) = ∫ p(sn|π)p(π|S\n )dπ (4.70)
= Cat(sn|η\n ) (4.74) η\n,k ∝ ∑ n′̸=n sn′,k + αk (4.75) α ࣄલ p(π) = Dir(π|α) ͷύϥϝʔλ 43
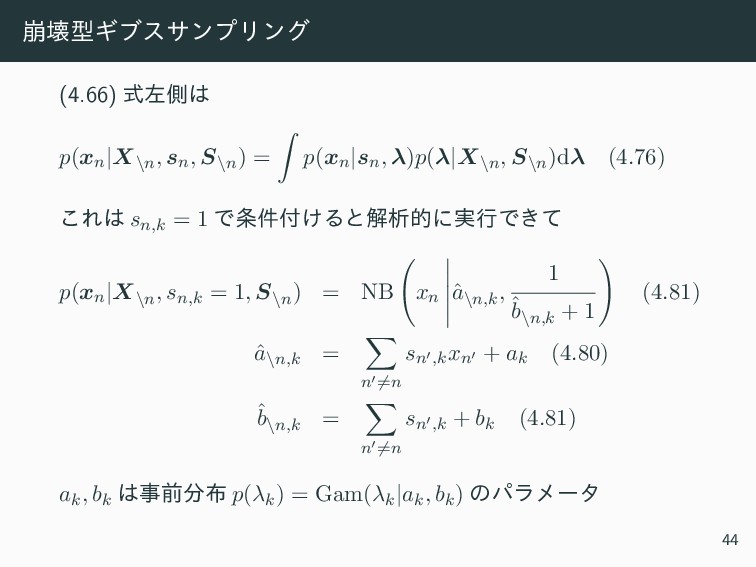
่յܕΪϒεαϯϓϦϯά (4.66) ࣜࠨଆ p(xn|X\n , sn, S\n ) = ∫
p(xn|sn, λ)p(λ|X\n , S\n )dλ (4.76) ͜Ε sn,k = 1 Ͱ͚݅Δͱղੳతʹ࣮ߦͰ͖ͯ p(xn|X\n , sn,k = 1, S\n ) = NB ( xn ˆ a\n,k , 1 ˆ b\n,k + 1 ) (4.81) ˆ a\n,k = ∑ n′̸=n sn′,kxn′ + ak (4.80) ˆ b\n,k = ∑ n′̸=n sn′,k + bk (4.81) ak, bk ࣄલ p(λk) = Gam(λk|ak, bk) ͷύϥϝʔλ 44
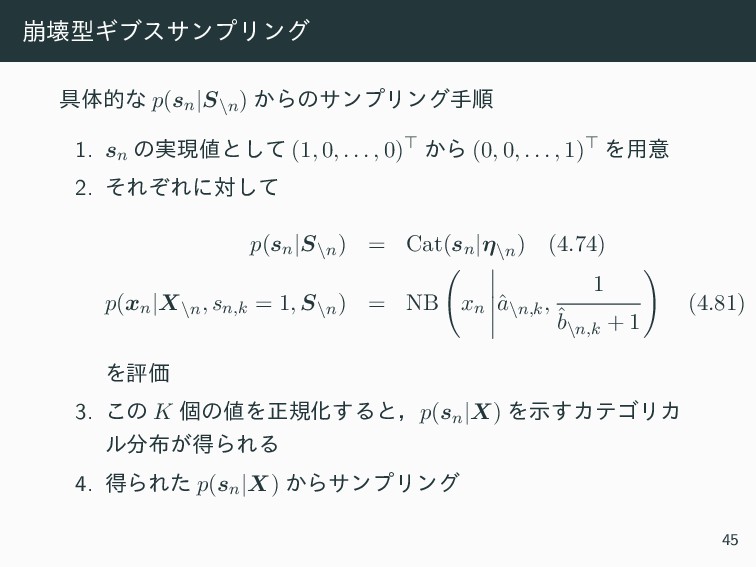
่յܕΪϒεαϯϓϦϯά ۩ମతͳ p(sn|S\n ) ͔ΒͷαϯϓϦϯάखॱ 1. sn ͷ࣮ݱͱͯ͠ (1, 0,
. . . , 0)⊤ ͔Β (0, 0, . . . , 1)⊤ Λ༻ҙ 2. ͦΕͧΕʹରͯ͠ p(sn|S\n ) = Cat(sn|η\n ) (4.74) p(xn|X\n , sn,k = 1, S\n ) = NB ( xn ˆ a\n,k , 1 ˆ b\n,k + 1 ) (4.81) ΛධՁ 3. ͜ͷ K ݸͷΛਖ਼نԽ͢Δͱɼp(sn|X) Λࣔ͢ΧςΰϦΧ ϧ͕ಘΒΕΔ 4. ಘΒΕͨ p(sn|X) ͔ΒαϯϓϦϯά 45
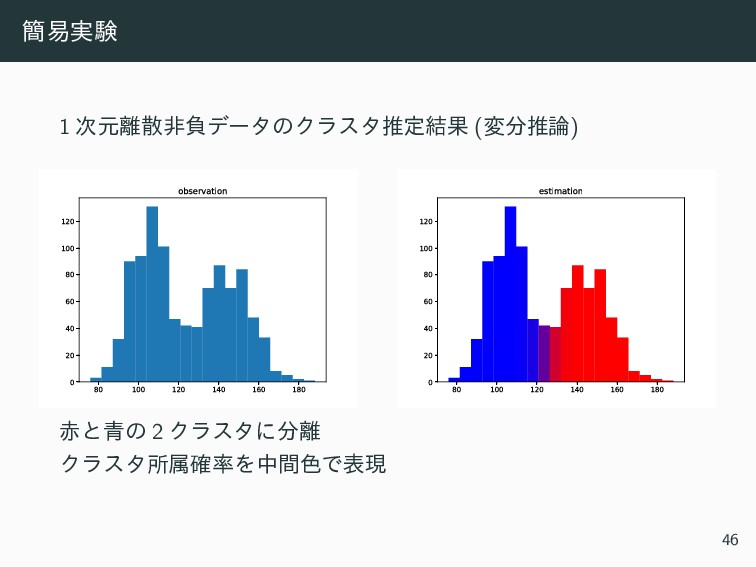
؆қ࣮ݧ 1 ࣍ݩࢄඇෛσʔλͷΫϥελਪఆ݁Ռ (มਪ) 80 100 120 140 160 180
0 20 40 60 80 100 120 observation 80 100 120 140 160 180 0 20 40 60 80 100 120 estimation ͱ੨ͷ 2 Ϋϥελʹ Ϋϥελॴଐ֬Λதؒ৭Ͱදݱ 46
؆қ࣮ݧ ELBO ͷऩଋ࣌ؒ (ਤ 4.10) ॎ࣠ɿELBOɼԣ࣠ (ର)ɿܭࢉ࣌ؒ [µs] 10 5
10 4 10 3 computation time( s) 5400 5200 5000 4800 4600 4400 ELBO VI GS CGS ؆୯ͳͳͷͰ࠷ऴతͳਫ਼ʹ͕ࠩͳ͍ 47
؆қ࣮ݧ େ·͔ͳͱͯ͠ • ͍ͷมਪ • ࠷ऴతʹਫ਼͕ྑ͍ͷ่յܕ GS • ่յܕ GS
ΠςϨʔγϣϯॳظ͔Βߴਫ਼ ΦεεϝɿͱΓ͋͑ͣ GS Λࢼ͠ɼਫ਼ʹೲಘ͕͍͔ͳ͚ Εมਪɾ่յܕ GS ಋग़ͯ͠ΈΔ 48
·ͱΊ • ࣄޙͷۙࣅख๏ͱͯ͠ΪϒεαϯϓϦϯάɾϒϩοΩϯ άΪϒεαϯϓϦϯάɾ่յܕΪϒεαϯϓϦϯάɾมਪ Λհ • ϙΞιϯࠞ߹Ϟσϧʹରͯ͠ΪϒεαϯϓϦϯάɾ่յܕΪ ϒεαϯϓϦϯάɾมਪΛ۩ମతʹಋग़ • ܭࢉ͕͍࣌ؒͷมਪɼਫ਼͕ྑ͍ͷ่յܕΪϒε
αϯϓϦϯάɼಋग़ָ͕ͳͷΪϒεαϯϓϦϯά 49
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![มਪ ELBO(A.4, p.233) पลͷԼݶ L[q(Z)] Λ q(Z) ͷ ELBO ͱΑͿ](https://files.speakerdeck.com/presentations/2e7eda7d49ee4f2f89c9fb90dd44c65c/slide_20.jpg){kind=link}
![มਪ ELBO(A.4, p.233) KL[q(Z)∥p(Z|X)] = p(X) − L[q(Z)] (A.41) ln](https://files.speakerdeck.com/presentations/2e7eda7d49ee4f2f89c9fb90dd44c65c/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![؆қ࣮ݧ ELBO ͷऩଋ࣌ؒ (ਤ 4.10) ॎ࣠ɿELBOɼԣ࣠ (ର)ɿܭࢉ࣌ؒ [µs] 10 5](https://files.speakerdeck.com/presentations/2e7eda7d49ee4f2f89c9fb90dd44c65c/slide_49.jpg){kind=link}
{kind=link}
{kind=link}