Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
つくばチャレンジ2018技術調査報告 / Tsukuba Challenge 2018 Survey
Search
Yoshitaka HARA
January 14, 2019
Technology
210
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
つくばチャレンジ2018技術調査報告 / Tsukuba Challenge 2018 Survey
第12回つくばチャレンジシンポジウム | つくばチャレンジ2018
https://tsukubachallenge.jp/2018/about/symposium
Yoshitaka HARA
January 14, 2019
More Decks by Yoshitaka HARA
See All by Yoshitaka HARA
配送ロボットの経産省官民協議会の公開資料を調べてみた
ystk_hara
0
760
自律移動ロボットの法的な区分について調べてみた / Legal Classification of Autonomous Mobile Robots
ystk_hara
0
1.3k
つくばチャレンジ2020運営の活動報告 / Tsukuba Challenge 2020 Survey
ystk_hara
0
310
つくばチャレンジ2019技術調査報告 / Tsukuba Challenge 2019 Survey
ystk_hara
0
230
Cartographer を用いた 3D SLAM / 3D SLAM using Cartographer
ystk_hara
0
1.2k
ロボティクスにおける SLAM 手法と実用化例 / SLAM Technology and Application Examples
ystk_hara
0
580
Cartographer と Autoware を用いた自律走行 / Autonomous Navigation using Cartographer and Autoware
ystk_hara
0
620
Other Decks in Technology
See All in Technology
AIがコードを書く時代、人間は何を保証するのか———馬場さんと考える、開発者に求められる新しい責任と価値 - TECH PLAY
netmarkjp
0
330
人手不足への挑戦:車両保全を支えるIoTとクラウド内製化の道【SORACOM Discovery 2026】
soracom
PRO
0
160
検索技術知識0のエンジニアが広告検索システムを内製化して運用するまで
lycorptech_jp
PRO
0
170
AIツールを導入しても生産性はあがらない? カオナビが直面した 3つの壁と乗り越え方。/ Overcoming 3 Barriers to AI-Driven Productivity at kaonavi
kaonavi
0
460
DevOps Agentで運用判断をチーム資産にする ~Agent InstructionsとAgent Skillを継続的に育てる~
fujioka6789
0
170
ソフトウェアアーキテクチャ研修【MIXI 26新卒技術研修】
mixi_engineers
PRO
2
1k
最新IoT事例11選に学ぶ!現場の成功パターンと実践のコツ【SORACOM Discovery 2026】
soracom
PRO
0
120
データと地図で読む 大井町の「かわるもの、かわらないもの」
yoshiyama_hana
0
750
13年運用タイトルのサーバーサイドが辿り着いた現在地 ― モンスターストライクにおける技術・組織・AI活用から得た知見
mixi_engineers
PRO
1
330
歴史から理解するクラウドインフラのしくみ
kizawa2020
0
190
AIエージェントの知識表現と推論に なぜグラフが使われるのか - 記号的AIの復権とニューラルAIとの統合
yohei1126
1
220
BigQuery を検索ソースとした AI Agent の作り方って 〇〇 通りあんねん
satohjohn
0
140
Featured
See All Featured
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.8k
[SF Ruby Conf 2025] Rails X
palkan
2
1.2k
What does AI have to do with Human Rights?
axbom
PRO
1
2.3k
Conquering PDFs: document understanding beyond plain text
inesmontani
PRO
4
2.9k
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
280
How to optimise 3,500 product descriptions for ecommerce in one day using ChatGPT
katarinadahlin
PRO
1
3.7k
Leading Effective Engineering Teams in the AI Era
addyosmani
9
2.2k
RailsConf 2023
tenderlove
30
1.5k
Leveraging LLMs for student feedback in introductory data science courses - posit::conf(2025)
minecr
1
330
Refactoring Trust on Your Teams (GOTO; Chicago 2020)
rmw
35
3.7k
Tell your own story through comics
letsgokoyo
1
1k
Writing Fast Ruby
sferik
630
63k
Transcript
つくばチャレンジ2018 技術調査アンケートの報告 原 祥尭(千葉工大 fuRo),冨沢 哲雄(防衛大),伊達 央 (筑波大),黒田 洋司(明治大),坪内 孝司(筑波大)
つくばチャレンジ2018シンポジウム 2019-01-14
本走行の記録 参加チーム数:63チーム、ロボット数:75台 本走行出走ロボット数:62台 課題達成:2台(内1台が完全課題達成)←完走+選択課題2つ以上 走行距離のマイルストーン 1/3 確認走行区間:27台、2/3 折り返し点:9台、3/3 完走(ゴール):6台 選択課題のマイルストーン
A 信号認識横断:7台、B チェックポイント通過:4台、C 探索対象発見:1台 アンケートへのご協力、誠にありがとうございました(67台分の回答) つくばチャレンジ2018シンポジウム 2019-01-14 1 達成度・課題 ハードウェア ソフトウェア
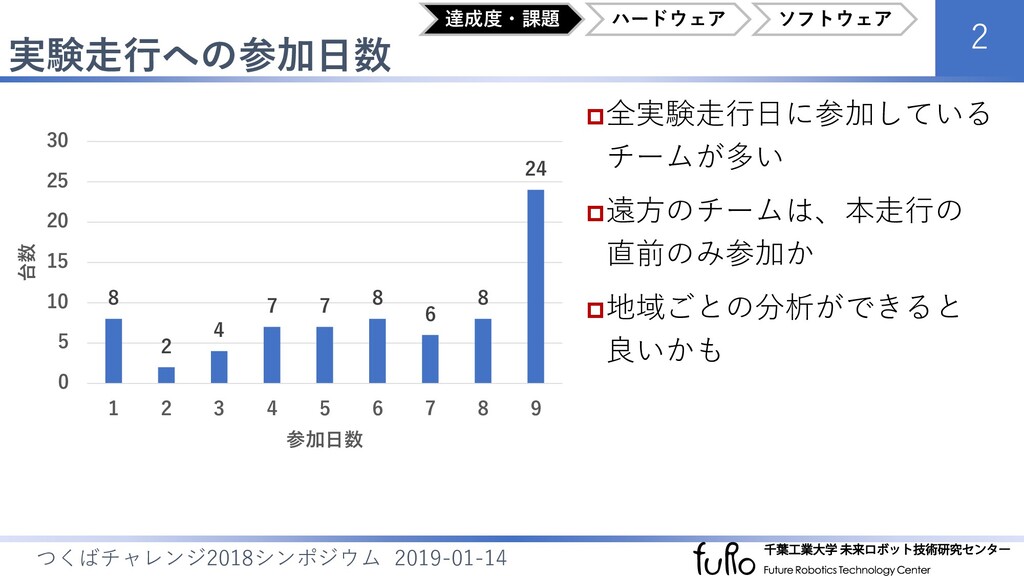
実験走行への参加日数 全実験走行日に参加している チームが多い 遠方のチームは、本走行の 直前のみ参加か 地域ごとの分析ができると 良いかも つくばチャレンジ2018シンポジウム 2019-01-14 2
8 2 4 7 7 8 6 8 24 0 5 10 15 20 25 30 1 2 3 4 5 6 7 8 9 台数 参加日数 達成度・課題 ハードウェア ソフトウェア
本走行/記録走行での走行距離 [m] チームによって経路が違う ため、完走でも距離は異なる 約 600 m を超えられれば、 完走が近い? 本走行で約
200 m 走行できた ロボットは、記録走行では 400 m 以上走行できていた? つくばチャレンジ2018シンポジウム 2019-01-14 3 18 29 9 6 1 2 0 1 1 2 4 1 15 19 18 5 0 2 0 1 1 4 6 3 0 5 10 15 20 25 30 35 台数 走行距離 [m] 本走行 本走行/記録走行 達成度・課題 ハードウェア ソフトウェア
本走行/記録走行での走行距離 [%] コースの 30 % を超えると、 完走が見えてくる? 完走していないが 100 %
との 回答もあり、自分たちの目的 は達成したということか つくばチャレンジ2018シンポジウム 2019-01-14 4 19 26 8 6 2 2 0 0 2 0 9 16 18 15 5 1 4 0 1 2 1 11 0 5 10 15 20 25 30 0 10 20 30 40 50 60 70 80 90 100 台数 走行距離 [%] 本走行 本走行/記録走行 達成度・課題 ハードウェア ソフトウェア
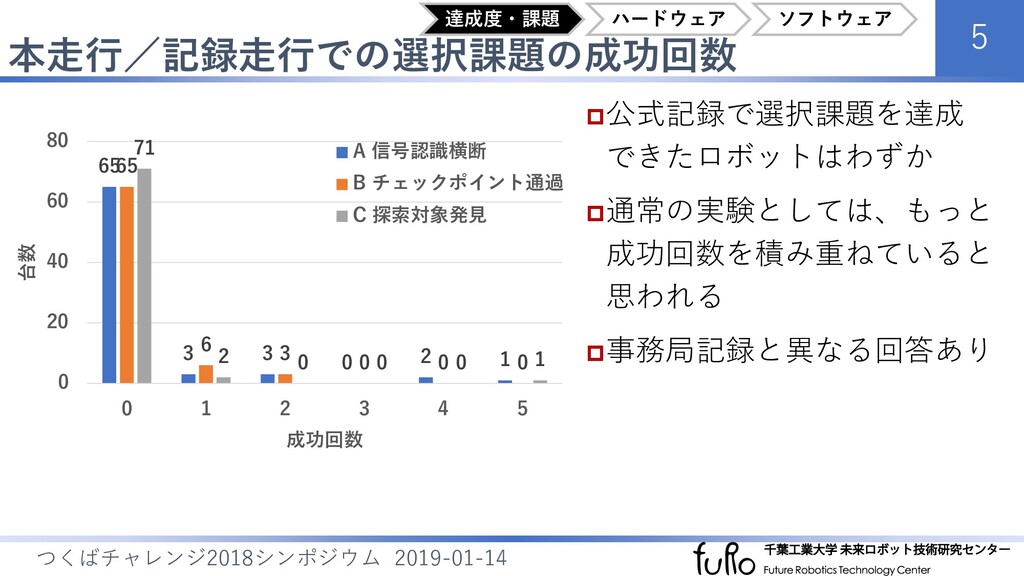
本走行/記録走行での選択課題の成功回数 公式記録で選択課題を達成 できたロボットはわずか 通常の実験としては、もっと 成功回数を積み重ねていると 思われる 事務局記録と異なる回答あり つくばチャレンジ2018シンポジウム 2019-01-14 5
65 3 3 0 2 1 65 6 3 0 0 0 71 2 0 0 0 1 0 20 40 60 80 0 1 2 3 4 5 台数 成功回数 A 信号認識横断 B チェックポイント通過 C 探索対象発見 達成度・課題 ハードウェア ソフトウェア
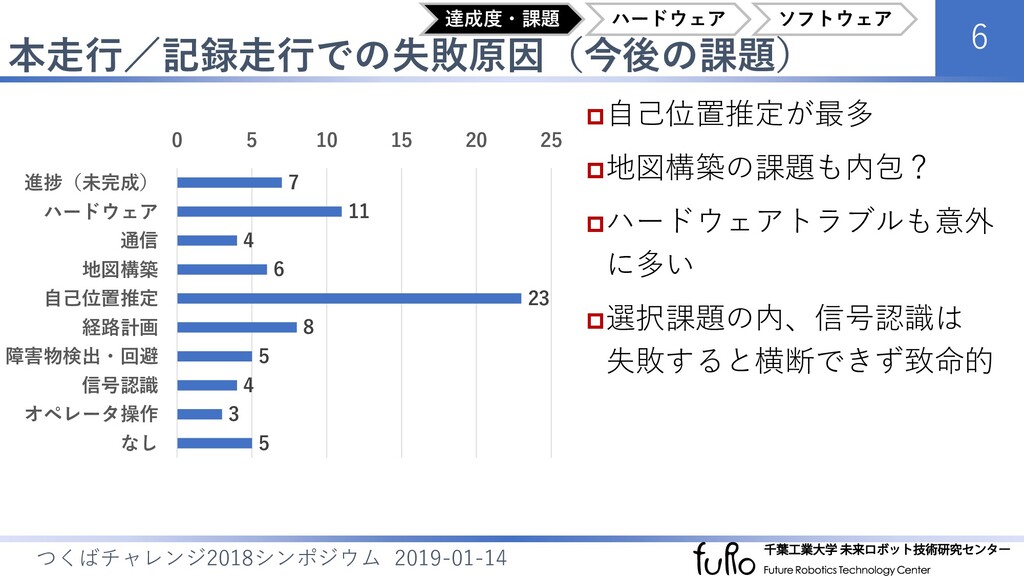
本走行/記録走行での失敗原因(今後の課題) 自己位置推定が最多 地図構築の課題も内包? ハードウェアトラブルも意外 に多い 選択課題の内、信号認識は 失敗すると横断できず致命的 つくばチャレンジ2018シンポジウム 2019-01-14 6
7 11 4 6 23 8 5 4 3 5 0 5 10 15 20 25 進捗(未完成) ハードウェア 通信 地図構築 自己位置推定 経路計画 障害物検出・回避 信号認識 オペレータ操作 なし 達成度・課題 ハードウェア ソフトウェア
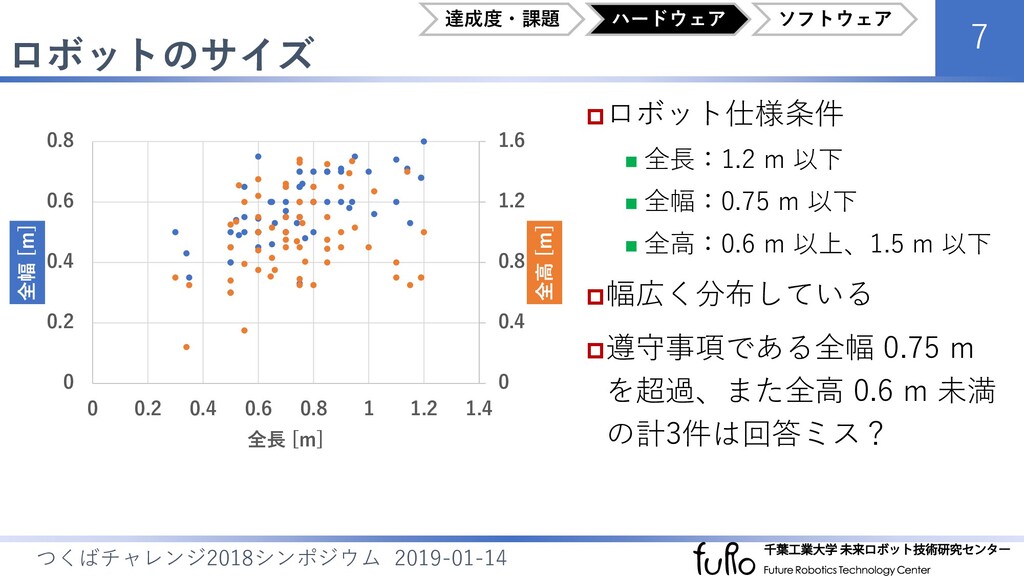
ロボットのサイズ ロボット仕様条件 ◼ 全長:1.2 m 以下 ◼ 全幅:0.75 m 以下
◼ 全高:0.6 m 以上、1.5 m 以下 幅広く分布している 遵守事項である全幅 0.75 m を超過、また全高 0.6 m 未満 の計3件は回答ミス? つくばチャレンジ2018シンポジウム 2019-01-14 7 0 0.4 0.8 1.2 1.6 0 0.2 0.4 0.6 0.8 0 0.2 0.4 0.6 0.8 1 1.2 1.4 全高 [m] 全幅 [m] 全長 [m] 達成度・課題 ハードウェア ソフトウェア
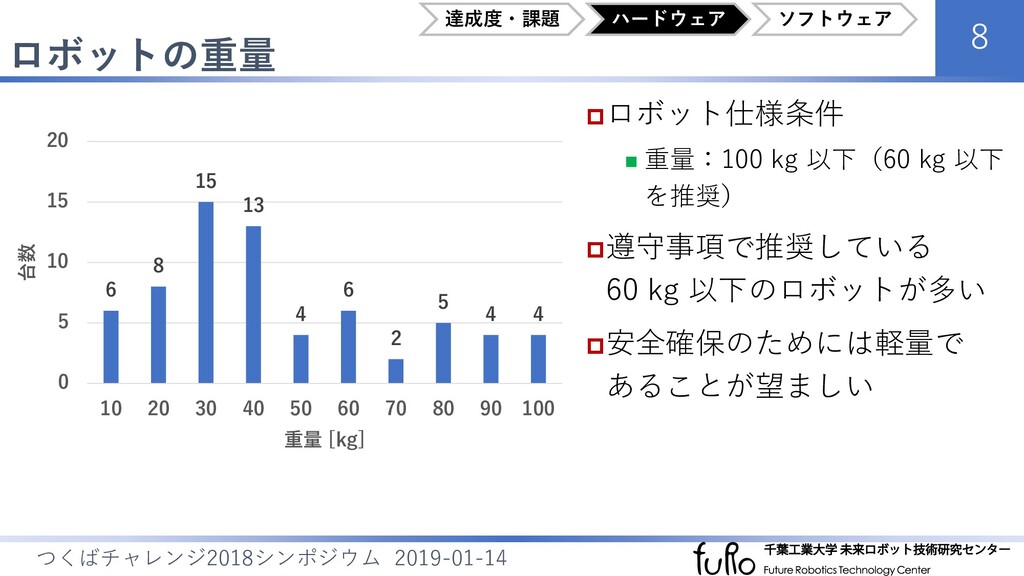
ロボットの重量 ロボット仕様条件 ◼ 重量:100 kg 以下(60 kg 以下 を推奨) 遵守事項で推奨している
60 kg 以下のロボットが多い 安全確保のためには軽量で あることが望ましい つくばチャレンジ2018シンポジウム 2019-01-14 8 6 8 15 13 4 6 2 5 4 4 0 5 10 15 20 10 20 30 40 50 60 70 80 90 100 台数 重量 [kg] 達成度・課題 ハードウェア ソフトウェア
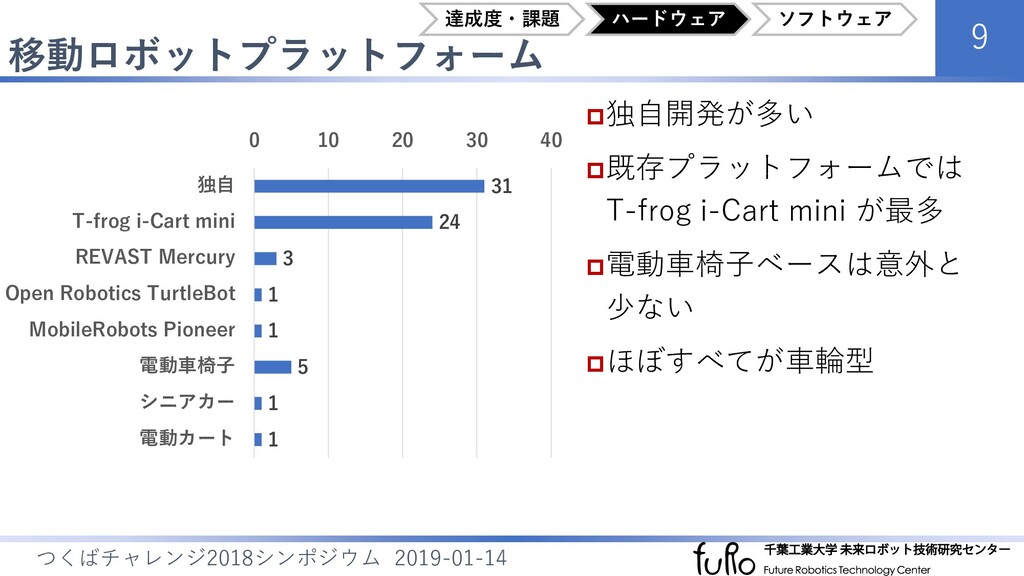
移動ロボットプラットフォーム 独自開発が多い 既存プラットフォームでは T-frog i-Cart mini が最多 電動車椅子ベースは意外と 少ない ほぼすべてが車輪型
つくばチャレンジ2018シンポジウム 2019-01-14 9 31 24 3 1 1 5 1 1 0 10 20 30 40 独自 T-frog i-Cart mini REVAST Mercury Open Robotics TurtleBot MobileRobots Pioneer 電動車椅子 シニアカー 電動カート 達成度・課題 ハードウェア ソフトウェア
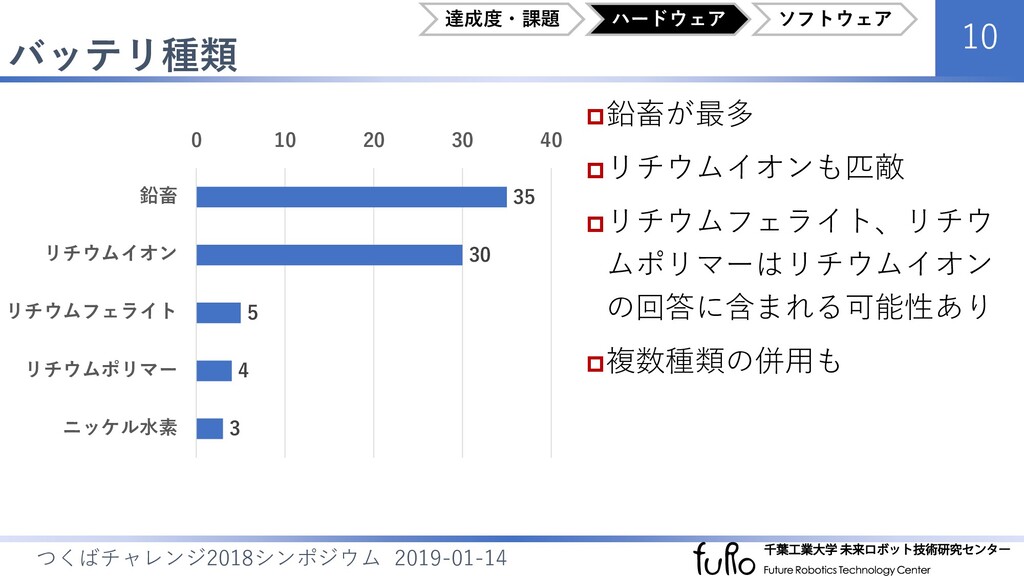
バッテリ種類 鉛畜が最多 リチウムイオンも匹敵 リチウムフェライト、リチウ ムポリマーはリチウムイオン の回答に含まれる可能性あり 複数種類の併用も つくばチャレンジ2018シンポジウム 2019-01-14 10
35 30 5 4 3 0 10 20 30 40 鉛畜 リチウムイオン リチウムフェライト リチウムポリマー ニッケル水素 達成度・課題 ハードウェア ソフトウェア
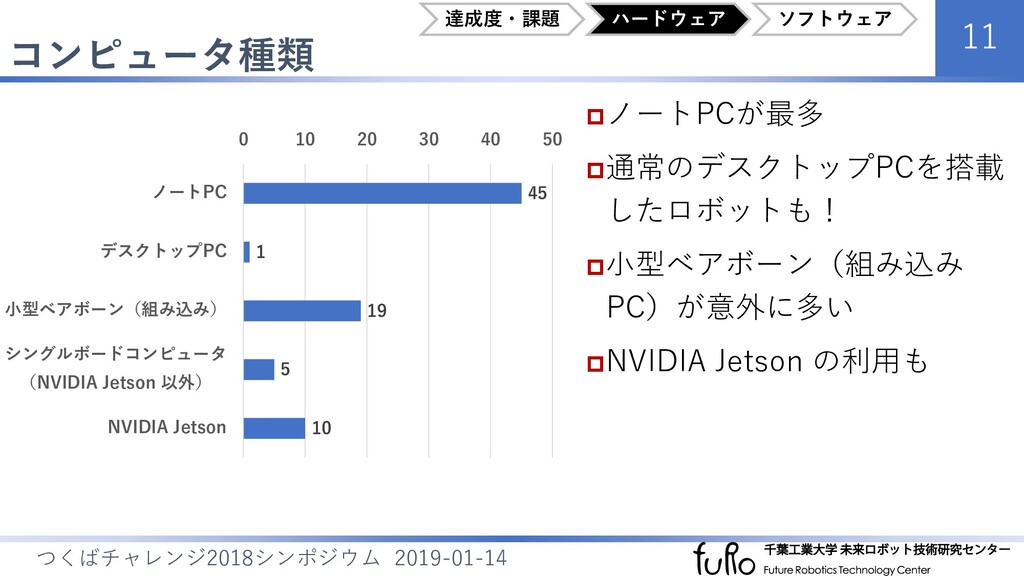
コンピュータ種類 ノートPCが最多 通常のデスクトップPCを搭載 したロボットも! 小型ベアボーン(組み込み PC)が意外に多い NVIDIA Jetson の利用も つくばチャレンジ2018シンポジウム
2019-01-14 11 45 1 19 5 10 0 10 20 30 40 50 ノートPC デスクトップPC 小型ベアボーン(組み込み) シングルボードコンピュータ (NVIDIA Jetson 以外) NVIDIA Jetson 達成度・課題 ハードウェア ソフトウェア
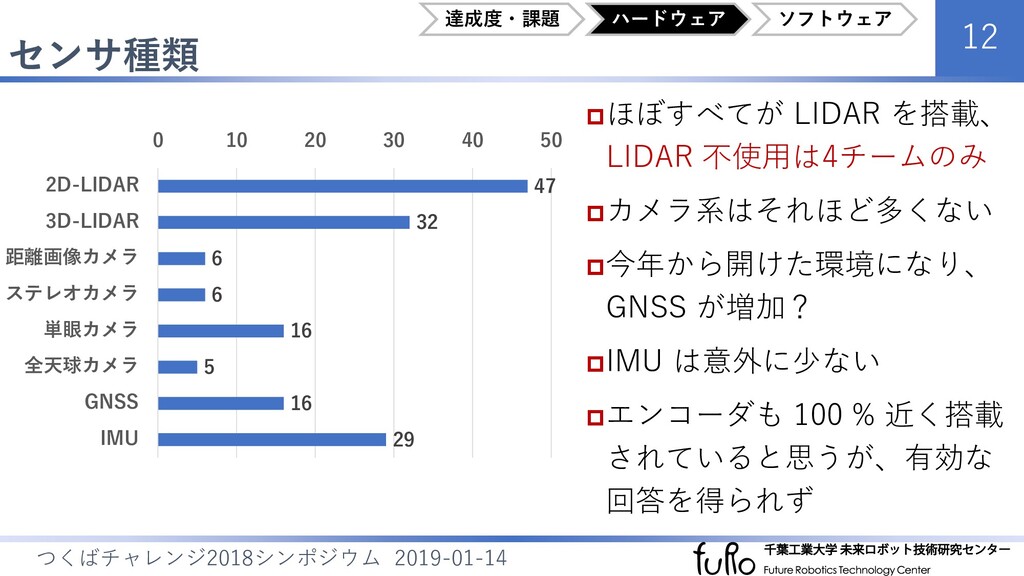
センサ種類 ほぼすべてが LIDAR を搭載、 LIDAR 不使用は4チームのみ カメラ系はそれほど多くない 今年から開けた環境になり、 GNSS が増加?
IMU は意外に少ない エンコーダも 100 % 近く搭載 されていると思うが、有効な 回答を得られず つくばチャレンジ2018シンポジウム 2019-01-14 12 47 32 6 6 16 5 16 29 0 10 20 30 40 50 2D-LIDAR 3D-LIDAR 距離画像カメラ ステレオカメラ 単眼カメラ 全天球カメラ GNSS IMU 達成度・課題 ハードウェア ソフトウェア
様々な 3D-LIDAR が登場 Velodyne LIDAR https://velodynelidar.com/ 北陽電機株式会社 https://www.hokuyo-aut.co.jp/
Ouster https://www.ouster.io/ HESAI http://www.hesaitech.com/ RoboSense LiDAR https://www.robosense.ai/ LeiShen LiDAR http://en.leishen-lidar.com/ つくばチャレンジ2018シンポジウム 2019-01-14 13 達成度・課題 ハードウェア ソフトウェア
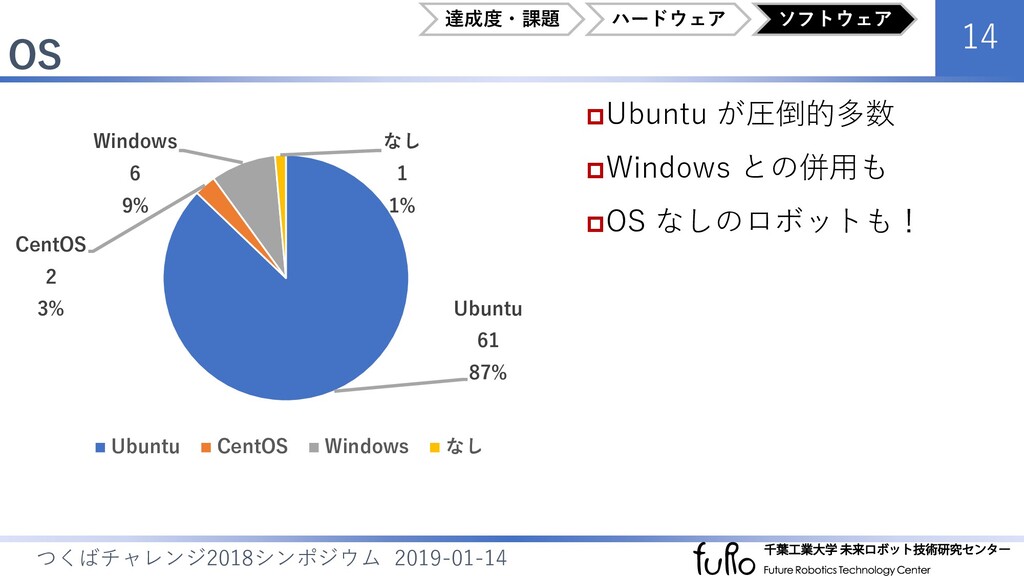
OS Ubuntu が圧倒的多数 Windows との併用も OS なしのロボットも! つくばチャレンジ2018シンポジウム 2019-01-14 14
Ubuntu 61 87% CentOS 2 3% Windows 6 9% なし 1 1% Ubuntu CentOS Windows なし 達成度・課題 ハードウェア ソフトウェア
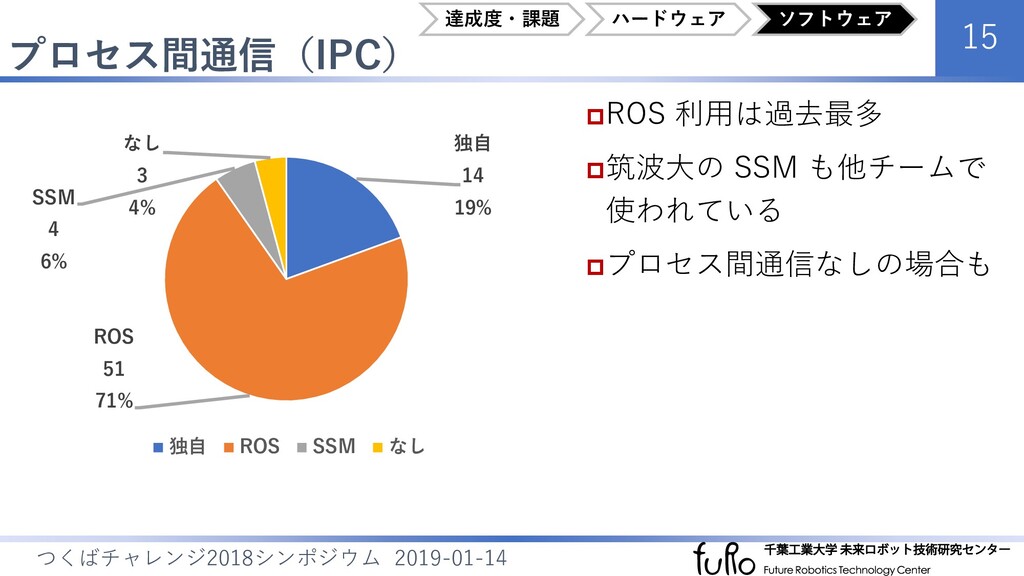
プロセス間通信(IPC) ROS 利用は過去最多 筑波大の SSM も他チームで 使われている プロセス間通信なしの場合も つくばチャレンジ2018シンポジウム 2019-01-14
15 独自 14 19% ROS 51 71% SSM 4 6% なし 3 4% 独自 ROS SSM なし 達成度・課題 ハードウェア ソフトウェア
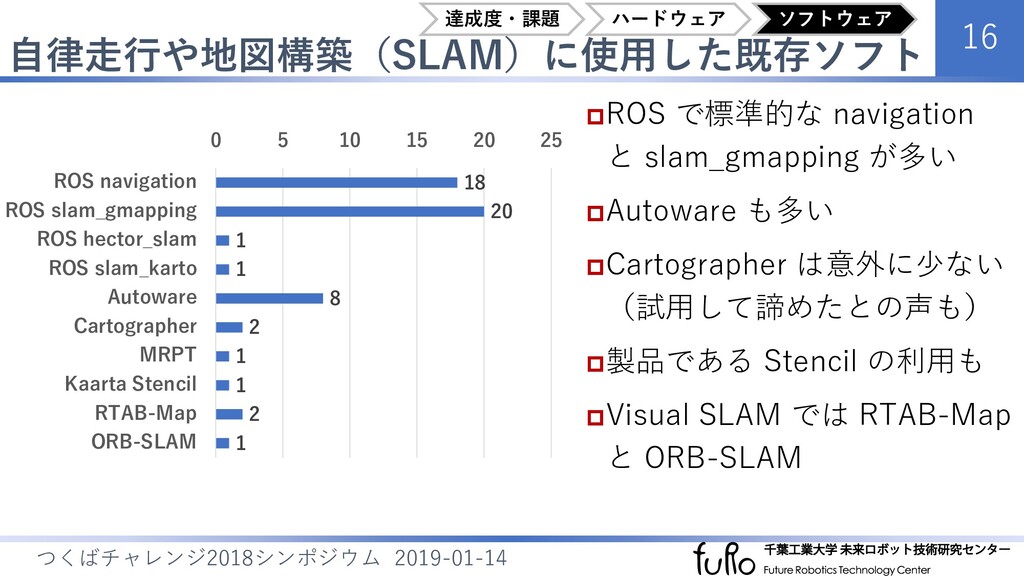
自律走行や地図構築(SLAM)に使用した既存ソフト ROS で標準的な navigation と slam_gmapping が多い Autoware も多い Cartographer
は意外に少ない (試用して諦めたとの声も) 製品である Stencil の利用も Visual SLAM では RTAB-Map と ORB-SLAM つくばチャレンジ2018シンポジウム 2019-01-14 16 18 20 1 1 8 2 1 1 2 1 0 5 10 15 20 25 ROS navigation ROS slam_gmapping ROS hector_slam ROS slam_karto Autoware Cartographer MRPT Kaarta Stencil RTAB-Map ORB-SLAM 達成度・課題 ハードウェア ソフトウェア
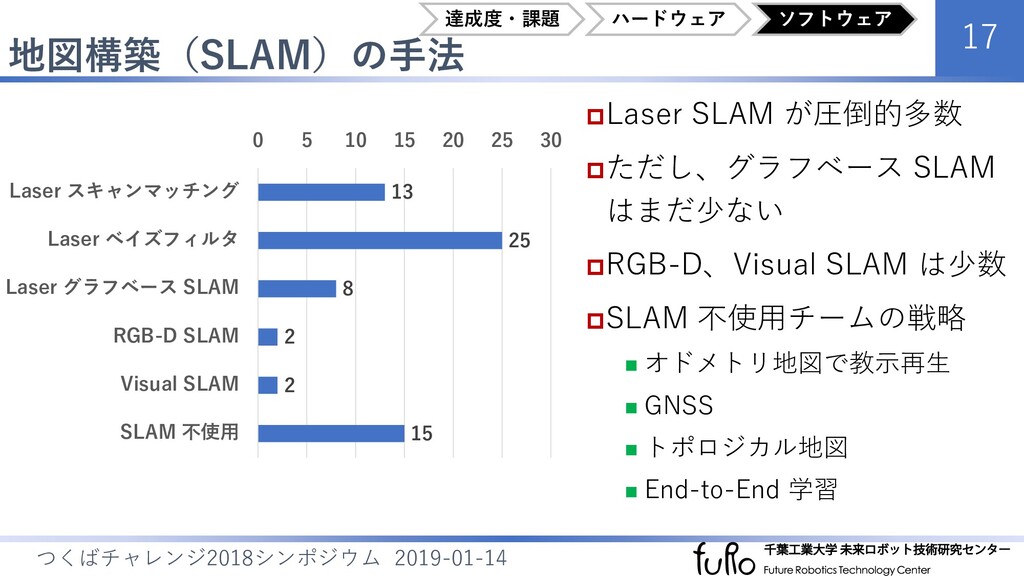
地図構築(SLAM)の手法 Laser SLAM が圧倒的多数 ただし、グラフベース SLAM はまだ少ない RGB-D、Visual SLAM は少数
SLAM 不使用チームの戦略 ◼ オドメトリ地図で教示再生 ◼ GNSS ◼ トポロジカル地図 ◼ End-to-End 学習 つくばチャレンジ2018シンポジウム 2019-01-14 17 13 25 8 2 2 15 0 5 10 15 20 25 30 Laser スキャンマッチング Laser ベイズフィルタ Laser グラフベース SLAM RGB-D SLAM Visual SLAM SLAM 不使用 達成度・課題 ハードウェア ソフトウェア
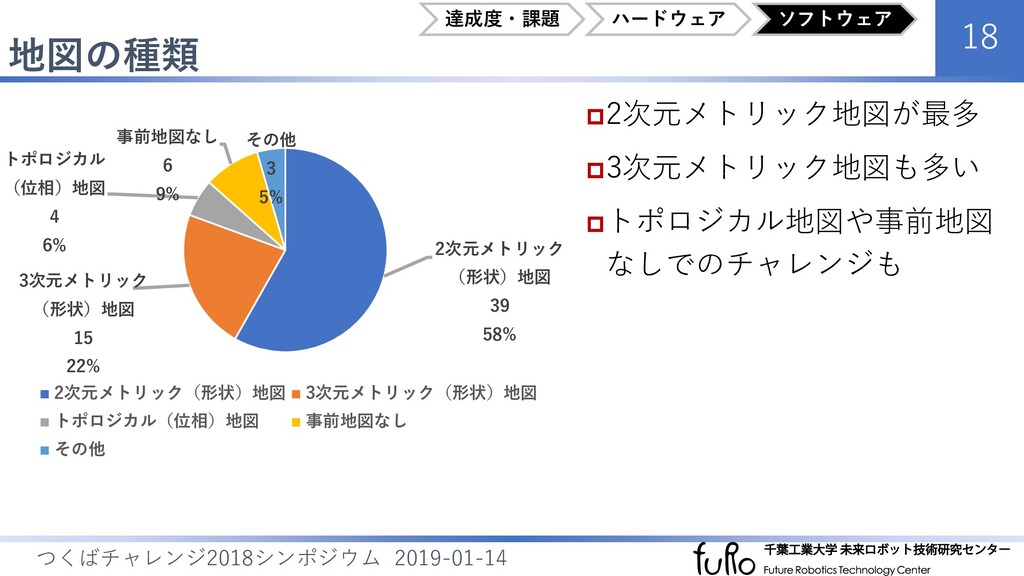
地図の種類 2次元メトリック地図が最多 3次元メトリック地図も多い トポロジカル地図や事前地図 なしでのチャレンジも つくばチャレンジ2018シンポジウム 2019-01-14 18 2次元メトリック (形状)地図
39 58% 3次元メトリック (形状)地図 15 22% トポロジカル (位相)地図 4 6% 事前地図なし 6 9% その他 3 5% 2次元メトリック(形状)地図 3次元メトリック(形状)地図 トポロジカル(位相)地図 事前地図なし その他 達成度・課題 ハードウェア ソフトウェア
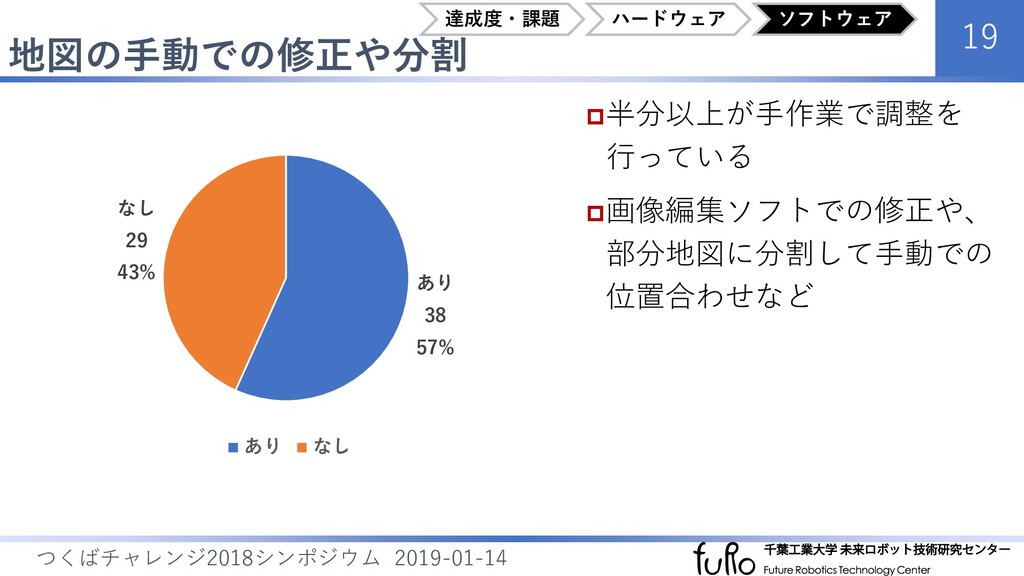
地図の手動での修正や分割 半分以上が手作業で調整を 行っている 画像編集ソフトでの修正や、 部分地図に分割して手動での 位置合わせなど つくばチャレンジ2018シンポジウム 2019-01-14 19 あり
38 57% なし 29 43% あり なし 達成度・課題 ハードウェア ソフトウェア
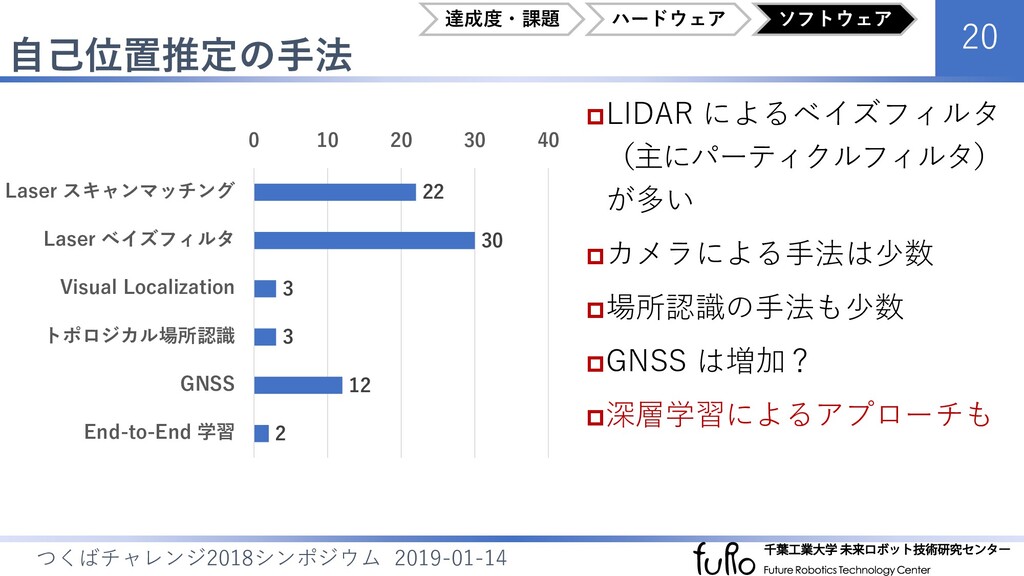
自己位置推定の手法 LIDAR によるベイズフィルタ (主にパーティクルフィルタ) が多い カメラによる手法は少数 場所認識の手法も少数 GNSS は増加? 深層学習によるアプローチも
つくばチャレンジ2018シンポジウム 2019-01-14 20 22 30 3 3 12 2 0 10 20 30 40 Laser スキャンマッチング Laser ベイズフィルタ Visual Localization トポロジカル場所認識 GNSS End-to-End 学習 達成度・課題 ハードウェア ソフトウェア
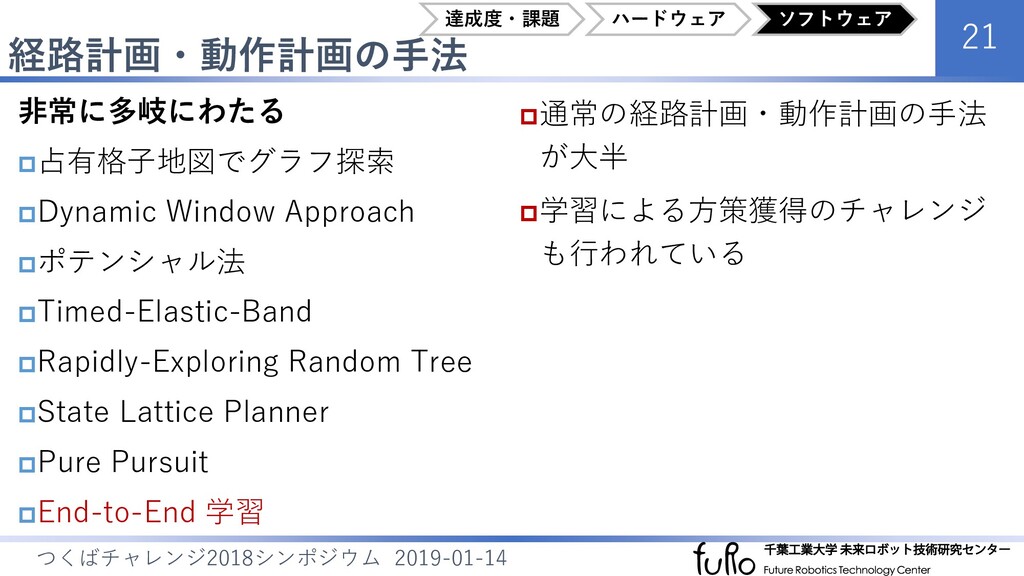
経路計画・動作計画の手法 非常に多岐にわたる 占有格子地図でグラフ探索 Dynamic Window Approach ポテンシャル法 Timed-Elastic-Band Rapidly-Exploring Random
Tree State Lattice Planner Pure Pursuit End-to-End 学習 つくばチャレンジ2018シンポジウム 2019-01-14 21 通常の経路計画・動作計画の手法 が大半 学習による方策獲得のチャレンジ も行われている 達成度・課題 ハードウェア ソフトウェア
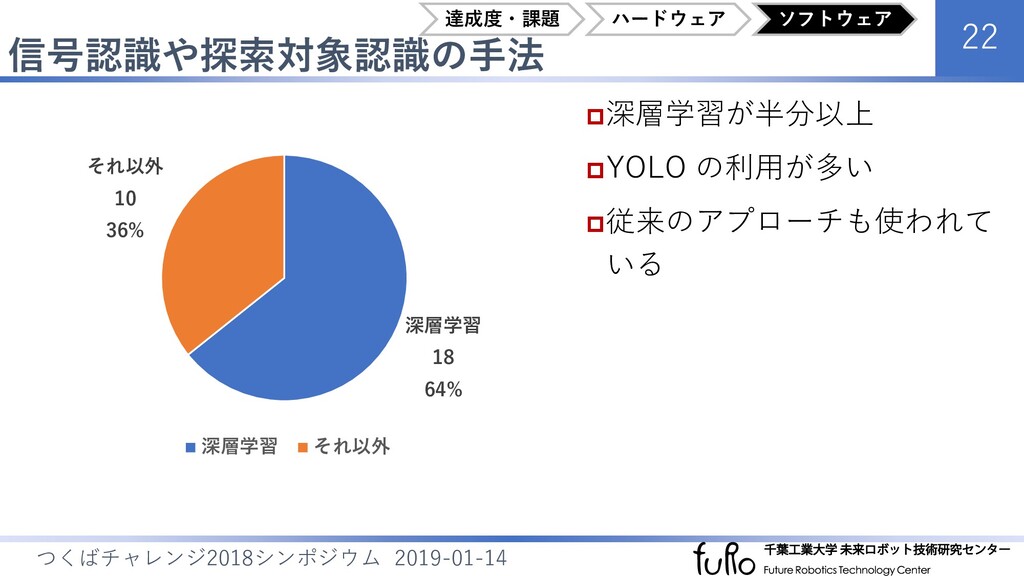
信号認識や探索対象認識の手法 深層学習が半分以上 YOLO の利用が多い 従来のアプローチも使われて いる つくばチャレンジ2018シンポジウム 2019-01-14 22 深層学習
18 64% それ以外 10 36% 深層学習 それ以外 達成度・課題 ハードウェア ソフトウェア
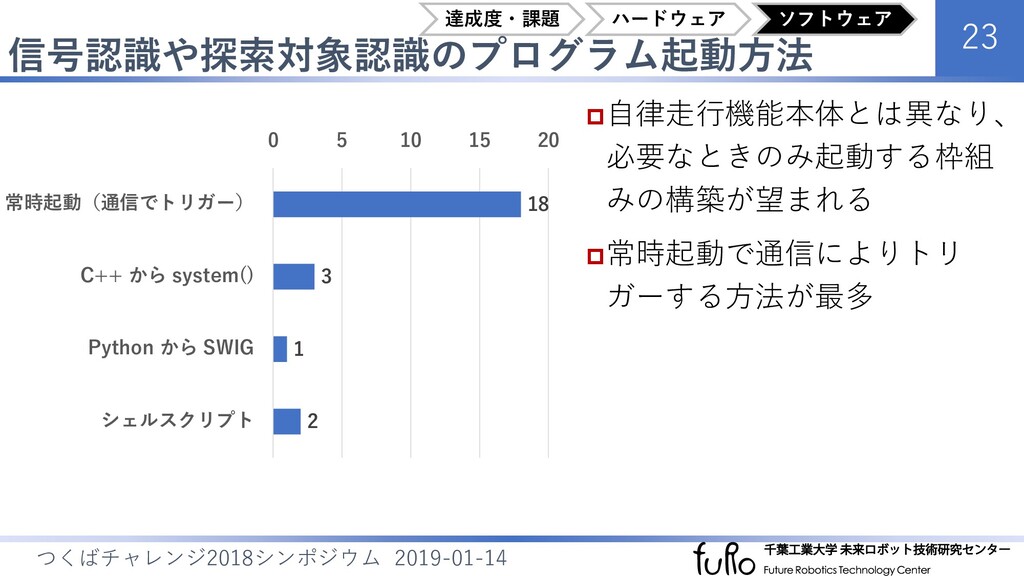
信号認識や探索対象認識のプログラム起動方法 自律走行機能本体とは異なり、 必要なときのみ起動する枠組 みの構築が望まれる 常時起動で通信によりトリ ガーする方法が最多 つくばチャレンジ2018シンポジウム 2019-01-14 23 18
3 1 2 0 5 10 15 20 常時起動(通信でトリガー) C++ から system() Python から SWIG シェルスクリプト 達成度・課題 ハードウェア ソフトウェア
まとめ 技術調査アンケートに基づき、以下についてまとめた ◼ 本走行/記録走行での走行距離、選択課題の成功回数 ◼ 失敗原因、今後の課題 ◼ ハードウェア(プラットフォーム、コンピュータ、センサの分類など) ◼ ソフトウェア(OS、利用ソフト、手法の概要など)
挑戦的なアプローチとして、3次元地図、トポロジカル地図、カメラや GNSS の活用、深層学習による行動計画などが挙げられる つくばチャレンジ2018シンポジウム 2019-01-14 24 達成度・課題 ハードウェア ソフトウェア
{kind=link}
{kind=link}
{kind=link}
![本走行/記録走行での走行距離 [m] チームによって経路が違う ため、完走でも距離は異なる 約 600 m を超えられれば、 完走が近い? 本走行で約](https://files.speakerdeck.com/presentations/e44b71a316504bbd83646e6f6809db7c/slide_3.jpg){kind=link}
![本走行/記録走行での走行距離 [%] コースの 30 % を超えると、 完走が見えてくる? 完走していないが 100 %](https://files.speakerdeck.com/presentations/e44b71a316504bbd83646e6f6809db7c/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}