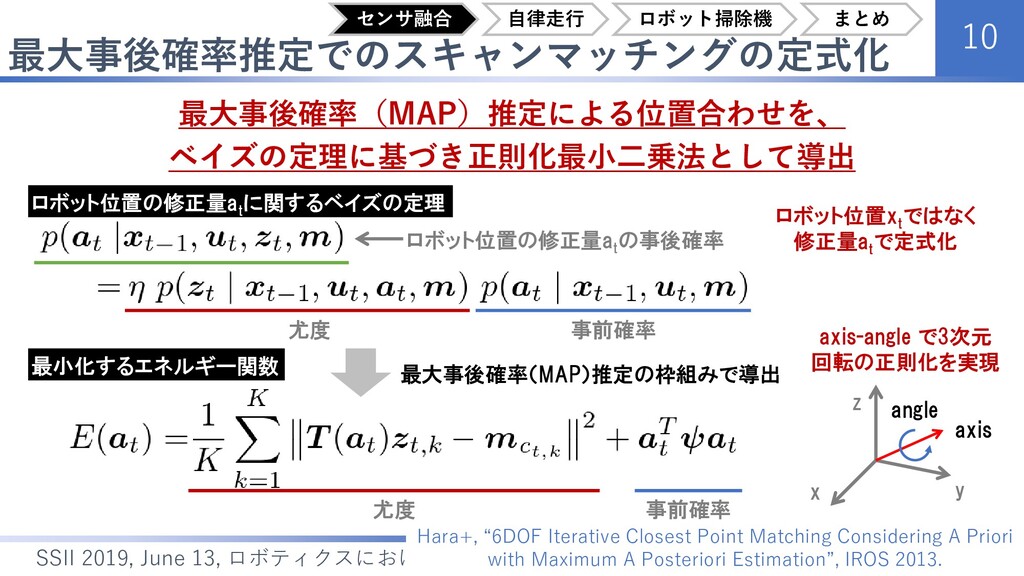
最大事後確率(MAP)推定による位置合わせを、 ベイズの定理に基づき正則化最小二乗法として導出 ロボット位置の修正量a t に関するベイズの定理 尤度 事前確率 ロボット位置の修正量a t の事後確率 尤度 事前確率 最大事後確率(MAP)推定の枠組みで導出 ロボット位置x t ではなく 修正量a t で定式化 axis-angle で3次元 回転の正則化を実現 axis angle x y z Hara+, “6DOF Iterative Closest Point Matching Considering A Priori with Maximum A Posteriori Estimation”, IROS 2013. センサ融合 自律走行 ロボット掃除機 まとめ
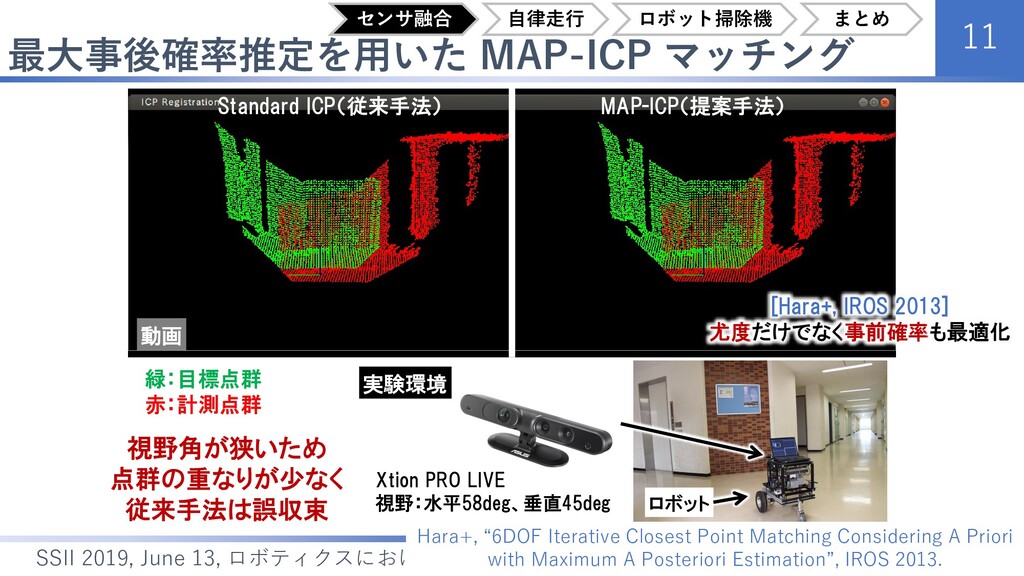
手法と実用化例 Standard ICP(従来手法) MAP-ICP(提案手法) Xtion PRO LIVE 視野:水平58deg、垂直45deg 実験環境 緑:目標点群 赤:計測点群 視野角が狭いため 点群の重なりが少なく 従来手法は誤収束 ロボット [Hara+, IROS 2013] 尤度だけでなく事前確率も最適化 Hara+, “6DOF Iterative Closest Point Matching Considering A Priori with Maximum A Posteriori Estimation”, IROS 2013. センサ融合 自律走行 ロボット掃除機 まとめ 動画
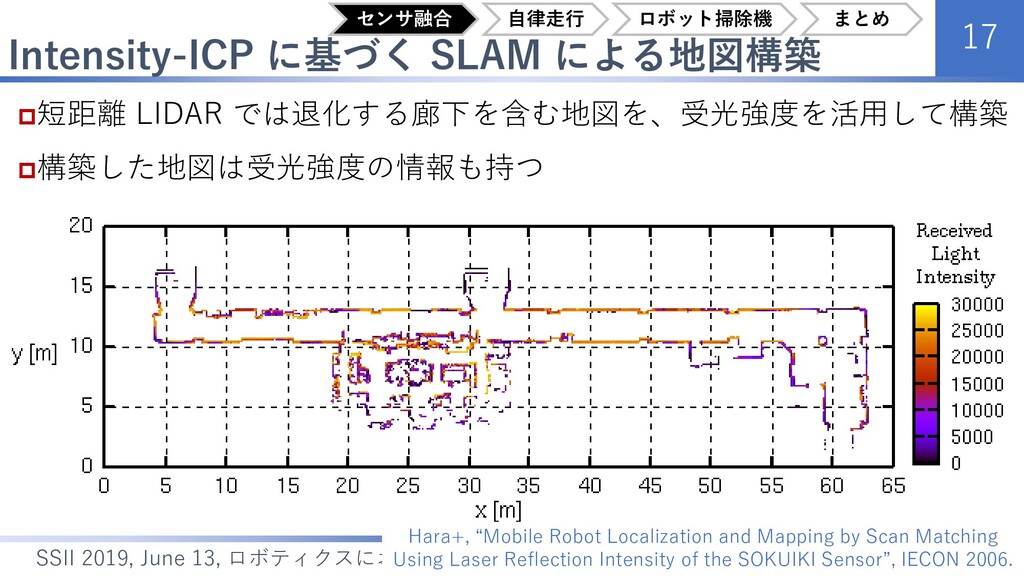
SLAM 手法と実用化例 短距離 LIDAR では退化する廊下を含む地図を、受光強度を活用して構築 構築した地図は受光強度の情報も持つ Hara+, “Mobile Robot Localization and Mapping by Scan Matching Using Laser Reflection Intensity of the SOKUIKI Sensor”, IECON 2006. センサ融合 自律走行 ロボット掃除機 まとめ
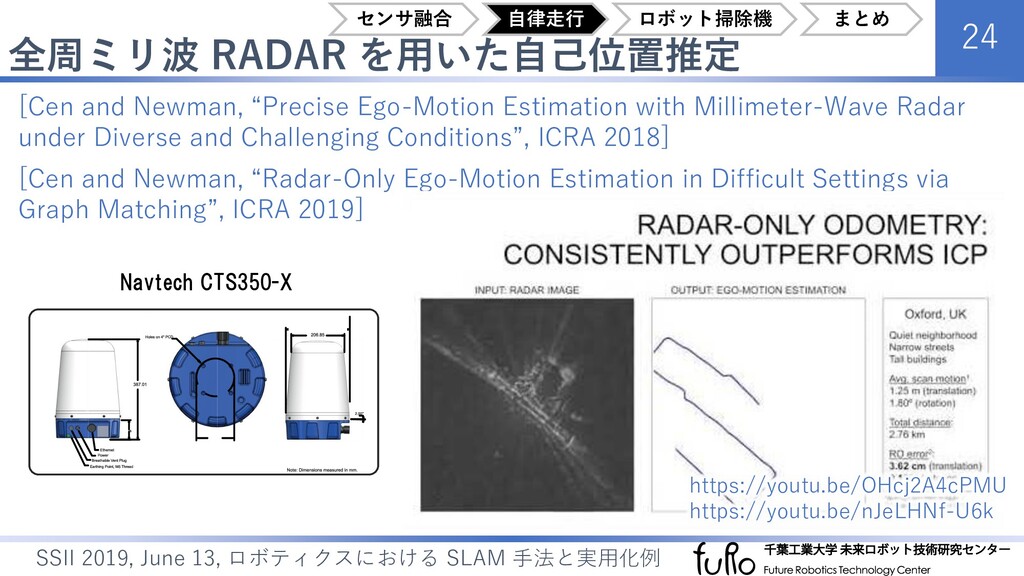
手法と実用化例 [Cen and Newman, “Precise Ego-Motion Estimation with Millimeter-Wave Radar under Diverse and Challenging Conditions”, ICRA 2018] [Cen and Newman, “Radar-Only Ego-Motion Estimation in Difficult Settings via Graph Matching”, ICRA 2019] Navtech CTS350-X https://youtu.be/OHcj2A4cPMU https://youtu.be/nJeLHNf-U6k センサ融合 自律走行 ロボット掃除機 まとめ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}