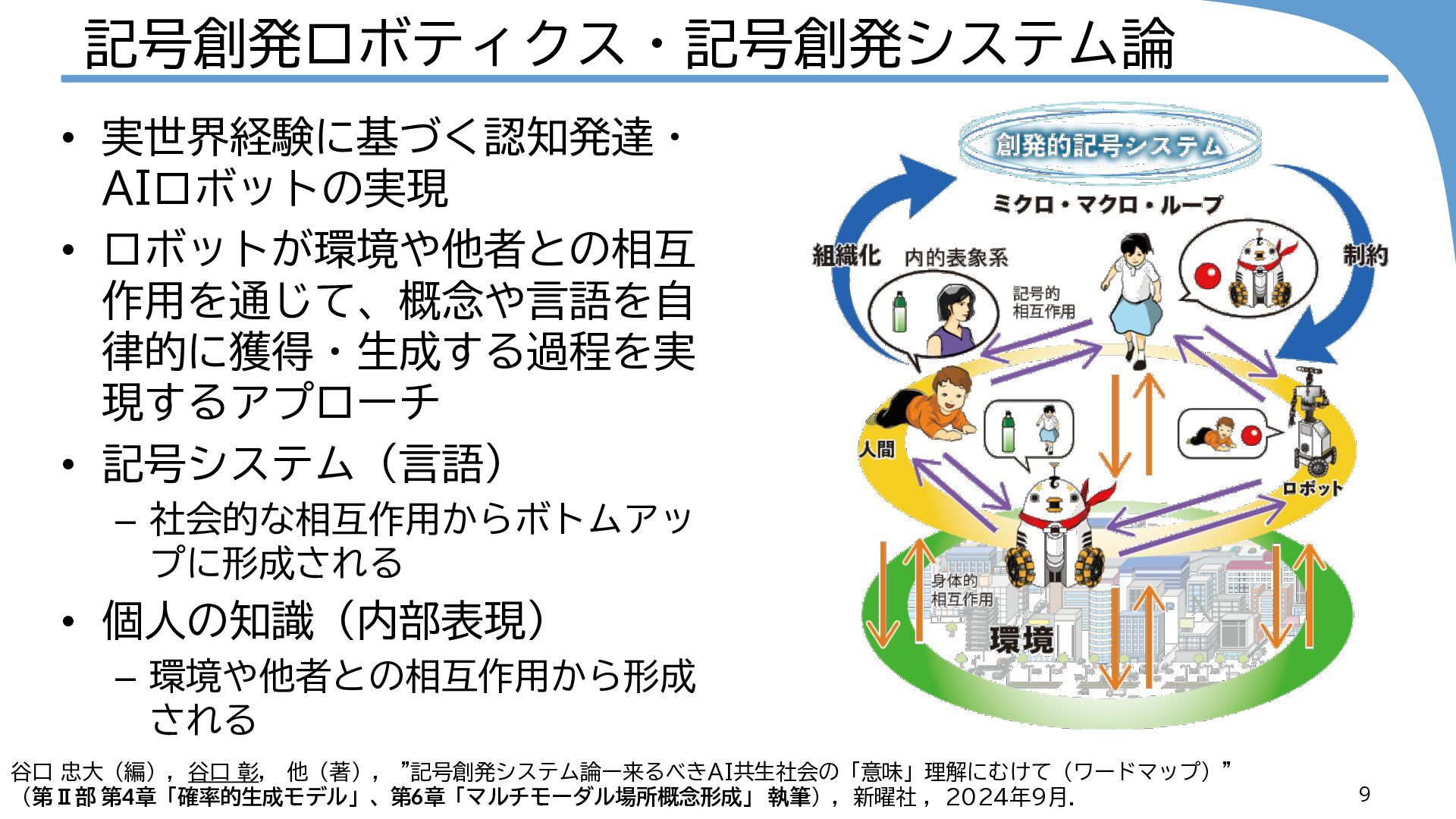
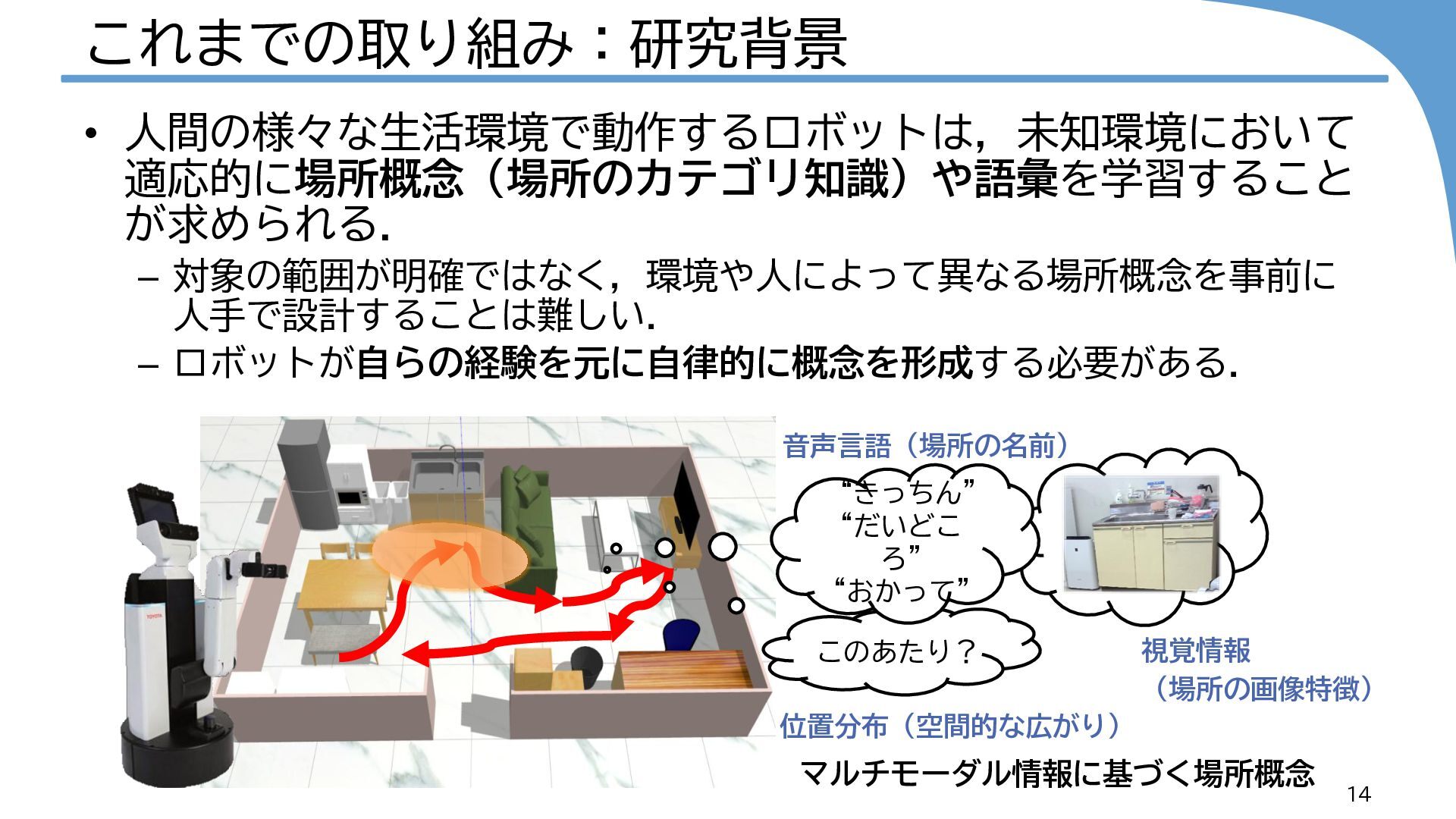
: Online Spatial Concept and Lexical Acquisition with Simultaneous Localization and Mapping, IEEE/RSJ IROS, pp. 811-818 (2017) 地図 位置分布 (ガウス分布) 自己位置推定 1 − t x x t x t+1 t z t u t C t i l 0 0 , m 0 0 , V 1 − t z 1 − t u 1 + t z 1 + t u LM t y AM t S l t f ∞ ∞ m l W k k SLAM 場所 画像 単語 音声認識・語彙獲得 マルチモーダル カテゴリゼーション “Third table” “Meeting space” ロボットが自らの経験を元に自律的に場所概念(場所のカテゴリ知識)や語彙を 学習する
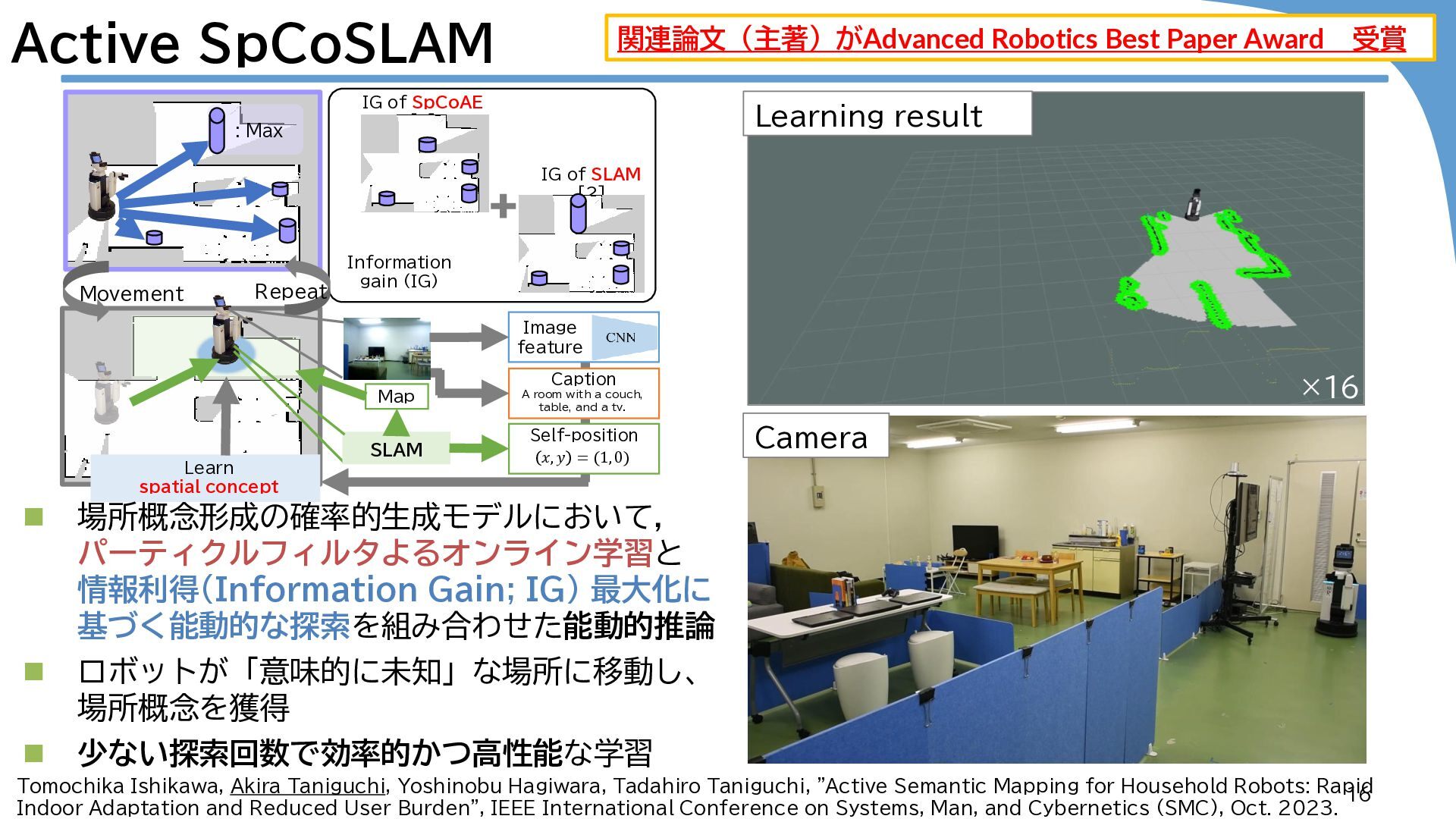
Yoshinobu Hagiwara, Tadahiro Taniguchi, "Active Semantic Mapping for Household Robots: Rapid Indoor Adaptation and Reduced User Burden", IEEE International Conference on Systems, Man, and Cybernetics (SMC), Oct. 2023. SLAM Movement Repeat IG of SpCoAE [1] Caption Learn spatial concept Self-position Information gain (IG) Image feature A room with a couch, table, and a tv. 𝑥, 𝑦 = (1, 0) IG of SLAM [2] : Max Map ◼ 場所概念形成の確率的生成モデルにおいて, パーティクルフィルタよるオンライン学習と 情報利得(Information Gain; IG) 最大化に 基づく能動的な探索を組み合わせた能動的推論 ◼ ロボットが「意味的に未知」な場所に移動し、 場所概念を獲得 ◼ 少ない探索回数で効率的かつ高性能な学習 関連論文(主著)がAdvanced Robotics Best Paper Award 受賞 16
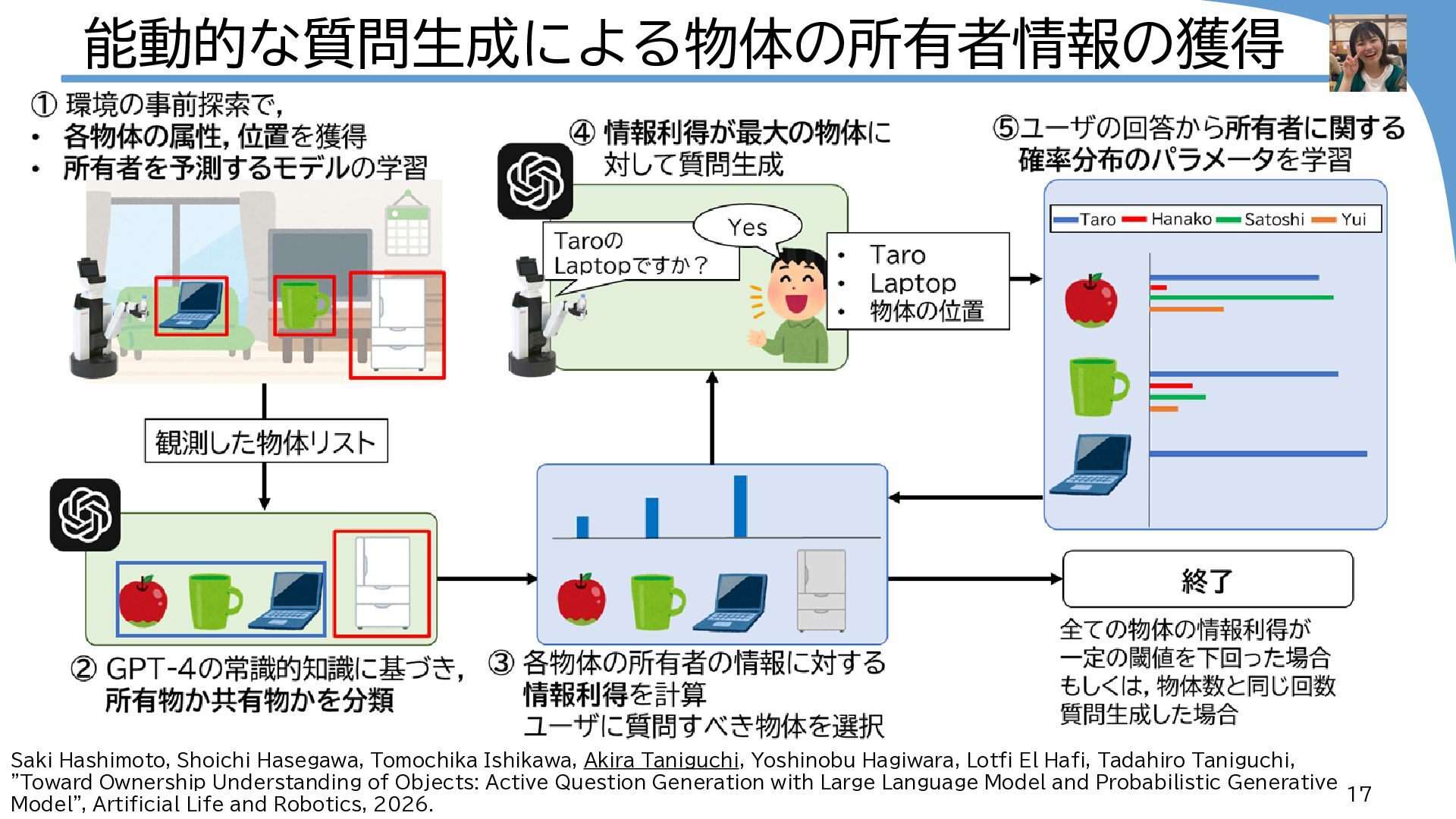
Yoshinobu Hagiwara, Lotfi El Hafi, Tadahiro Taniguchi, "Toward Ownership Understanding of Objects: Active Question Generation with Large Language Model and Probabilistic Generative Model", Artificial Life and Robotics, 2026.
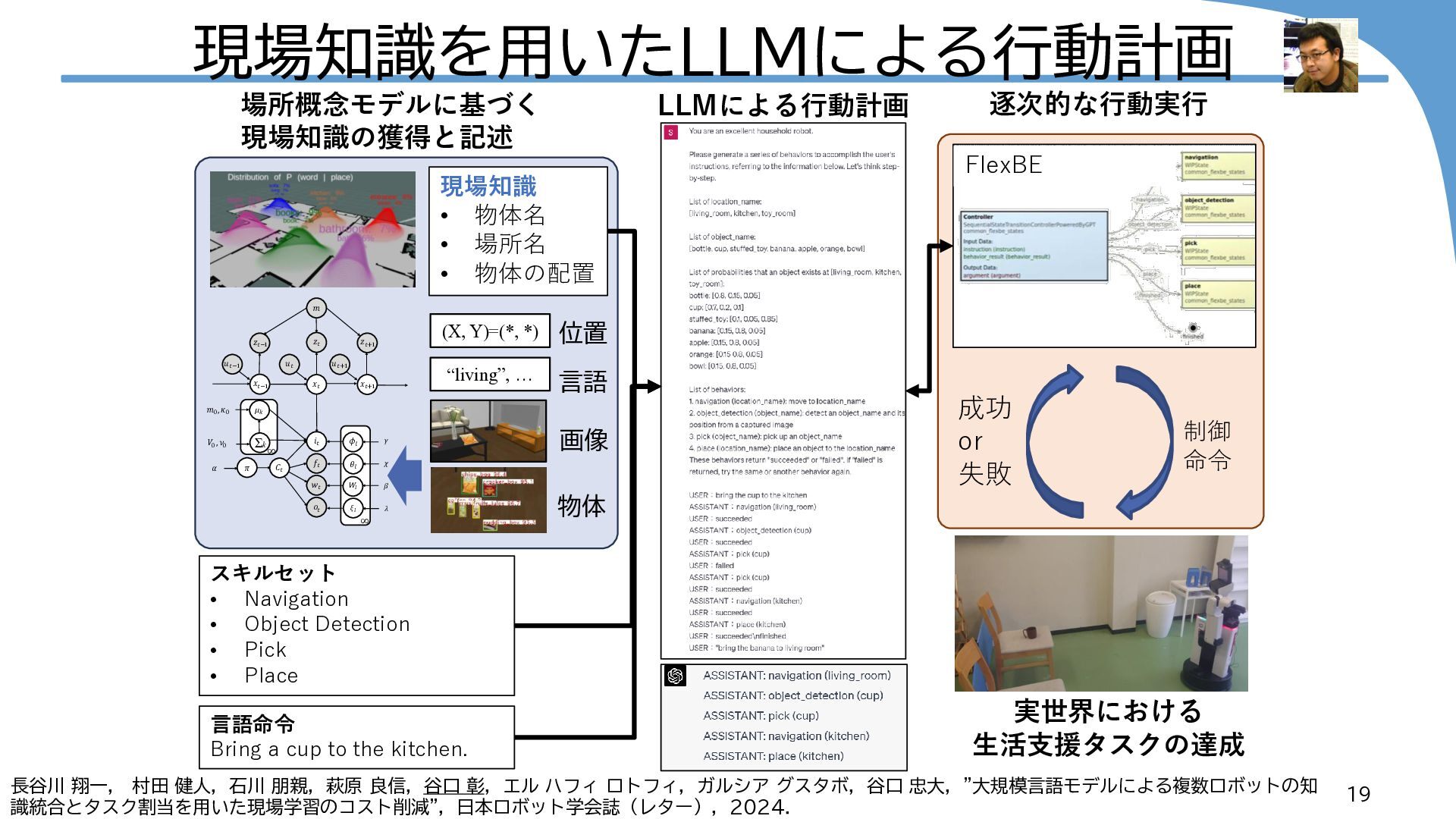
Akira Taniguchi, Shota Isobe, Lotfi El Hafi, Yoshinobu Hagiwara, Tadahiro Taniguchi, "Autonomous Planning Based on Spatial Concepts to Tidy Up Home Environments with Service Robots." Advanced Robotics, Vol. 35, No. 8, pp.471–489, 2021. 2023.9.13, 日本ロボット学会,研究奨励賞 18
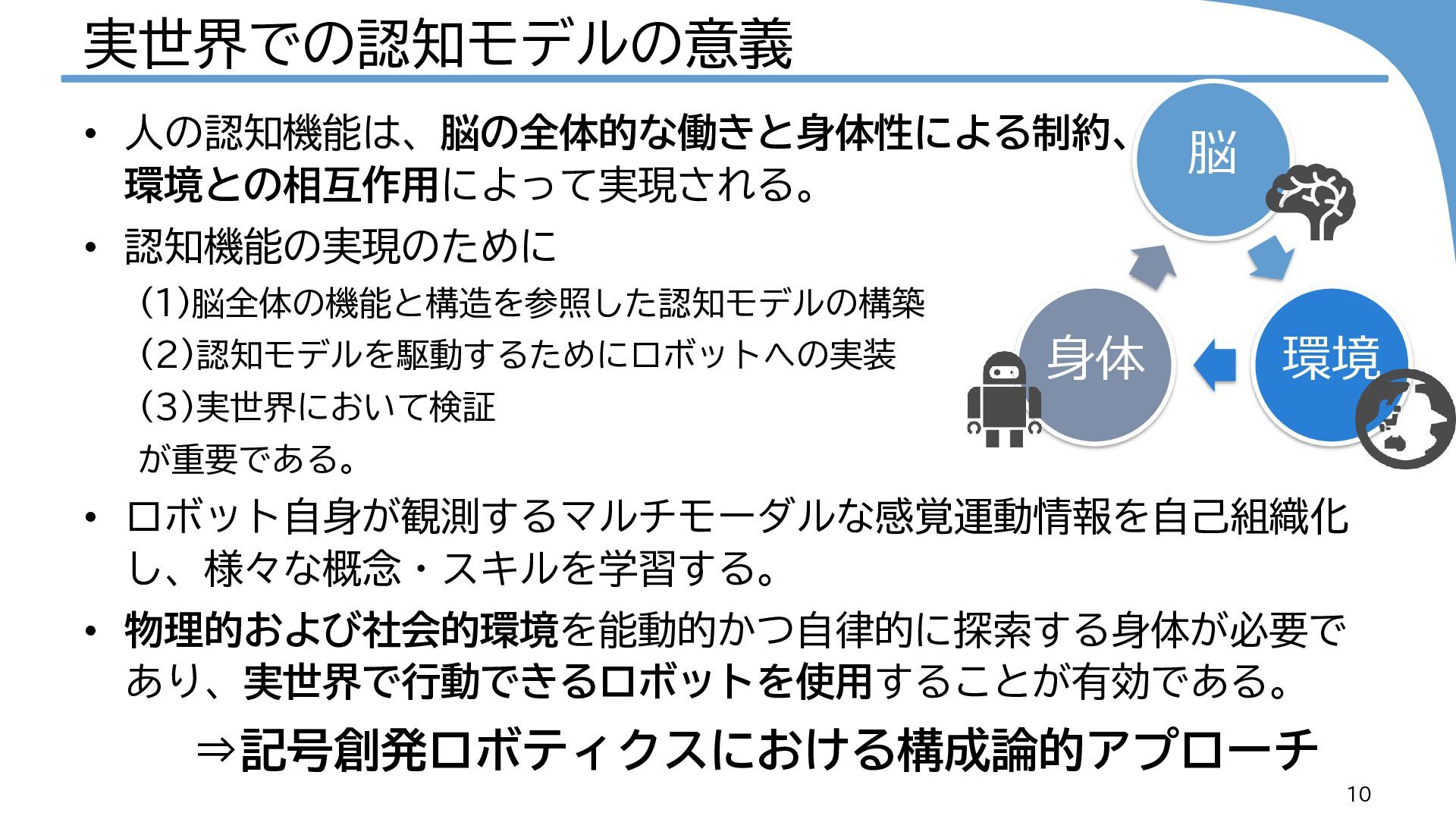
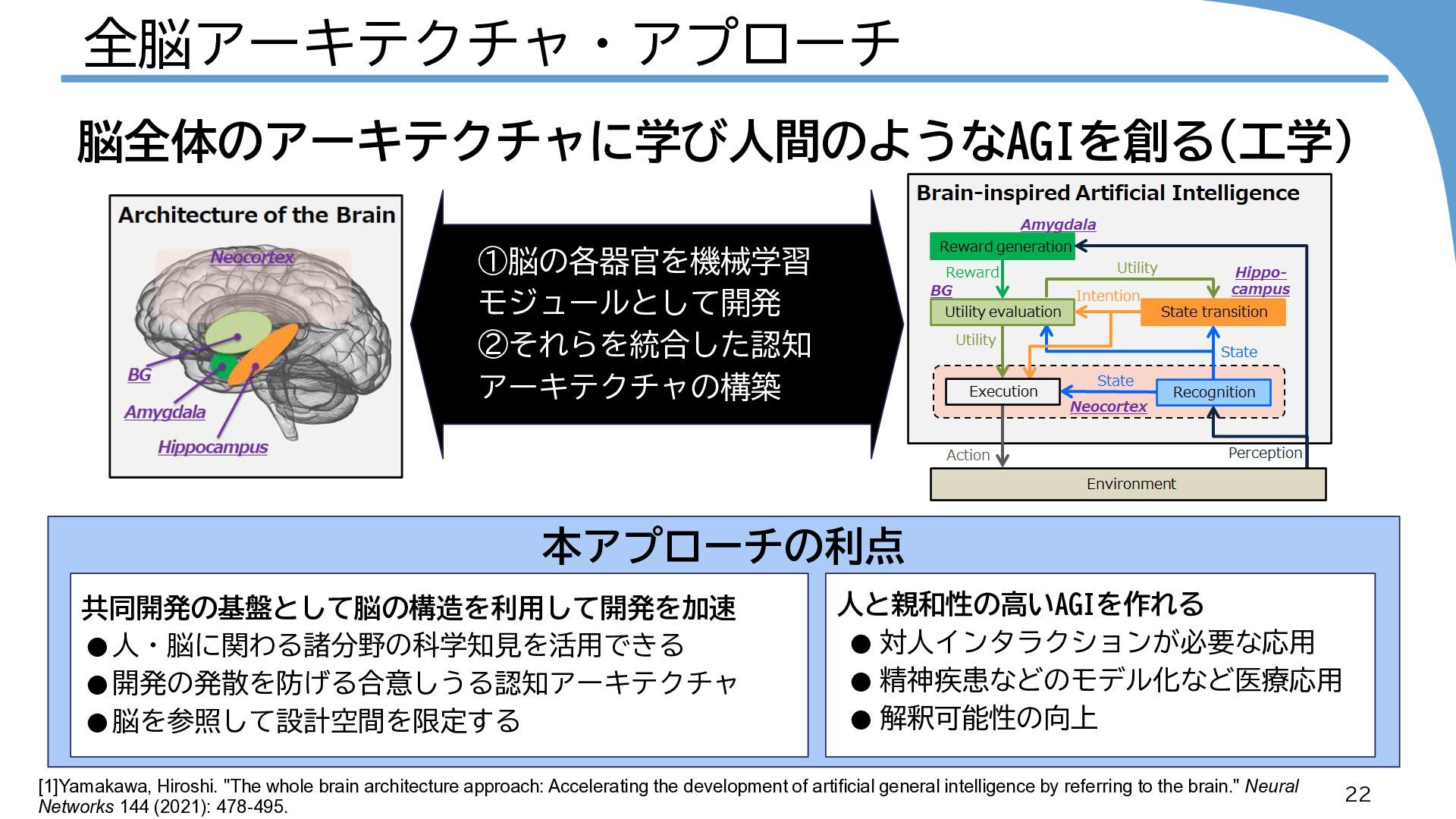
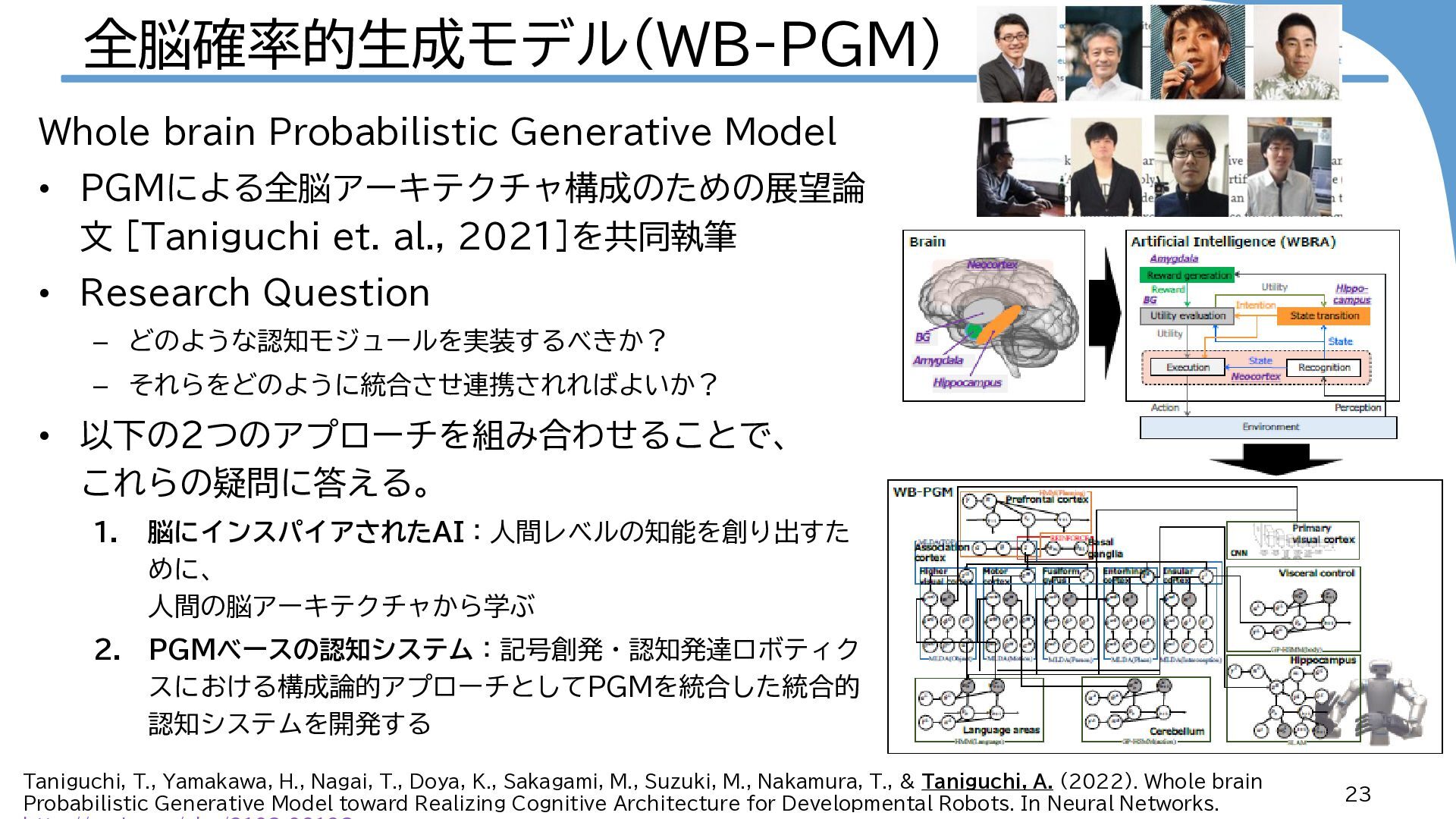
人・脳に関わる諸分野の科学知見を活用できる • 開発の発散を防げる合意しうる認知アーキテクチャ • 脳を参照して設計空間を限定する 人と親和性の高いAGIを作れる • 対人インタラクションが必要な応用 • 精神疾患などのモデル化など医療応用 • 解釈可能性の向上 [1]Yamakawa, Hiroshi. "The whole brain architecture approach: Accelerating the development of artificial general intelligence by referring to the brain." Neural Networks 144 (2021): 478-495.
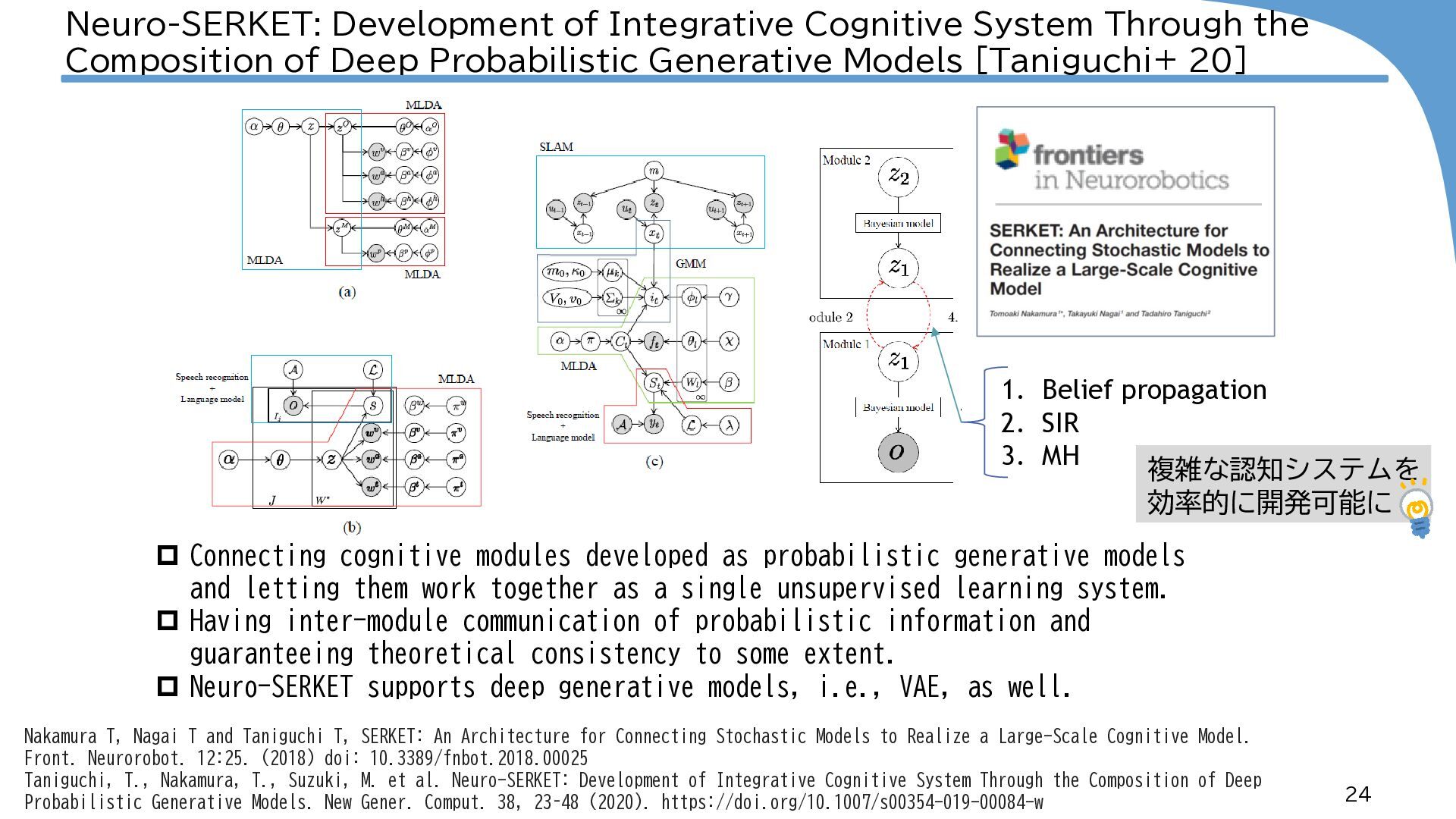
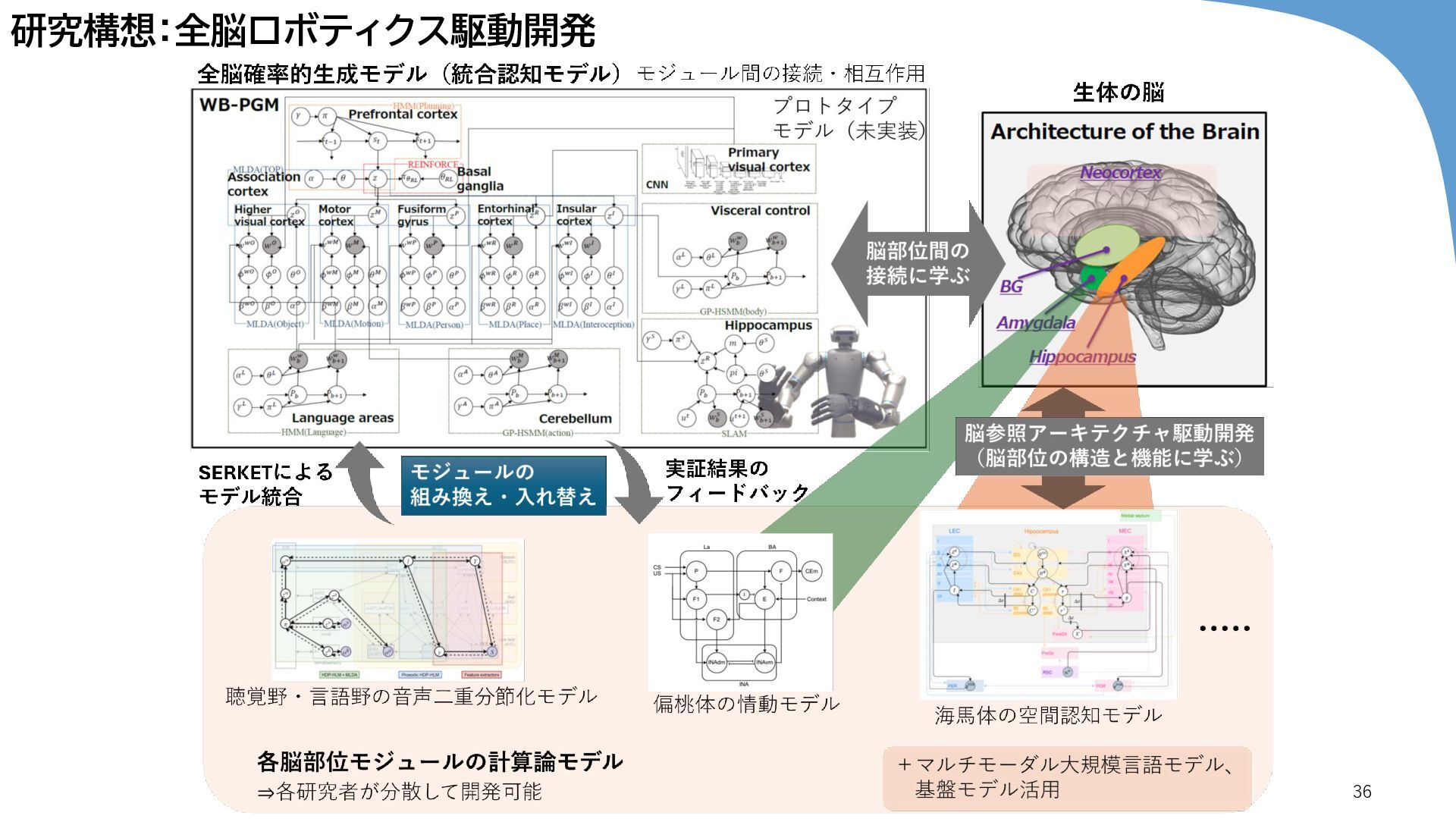
Deep Probabilistic Generative Models [Taniguchi+ 20] 24 Nakamura T, Nagai T and Taniguchi T, SERKET: An Architecture for Connecting Stochastic Models to Realize a Large-Scale Cognitive Model. Front. Neurorobot. 12:25. (2018) doi: 10.3389/fnbot.2018.00025 Taniguchi, T., Nakamura, T., Suzuki, M. et al. Neuro-SERKET: Development of Integrative Cognitive System Through the Composition of Deep Probabilistic Generative Models. New Gener. Comput. 38, 23–48 (2020). https://doi.org/10.1007/s00354-019-00084-w 1. Belief propagation 2. SIR 3. MH Connecting cognitive modules developed as probabilistic generative models and letting them work together as a single unsupervised learning system. Having inter-module communication of probabilistic information and guaranteeing theoretical consistency to some extent. Neuro-SERKET supports deep generative models, i.e., VAE, as well. 複雑な認知システムを 効率的に開発可能に
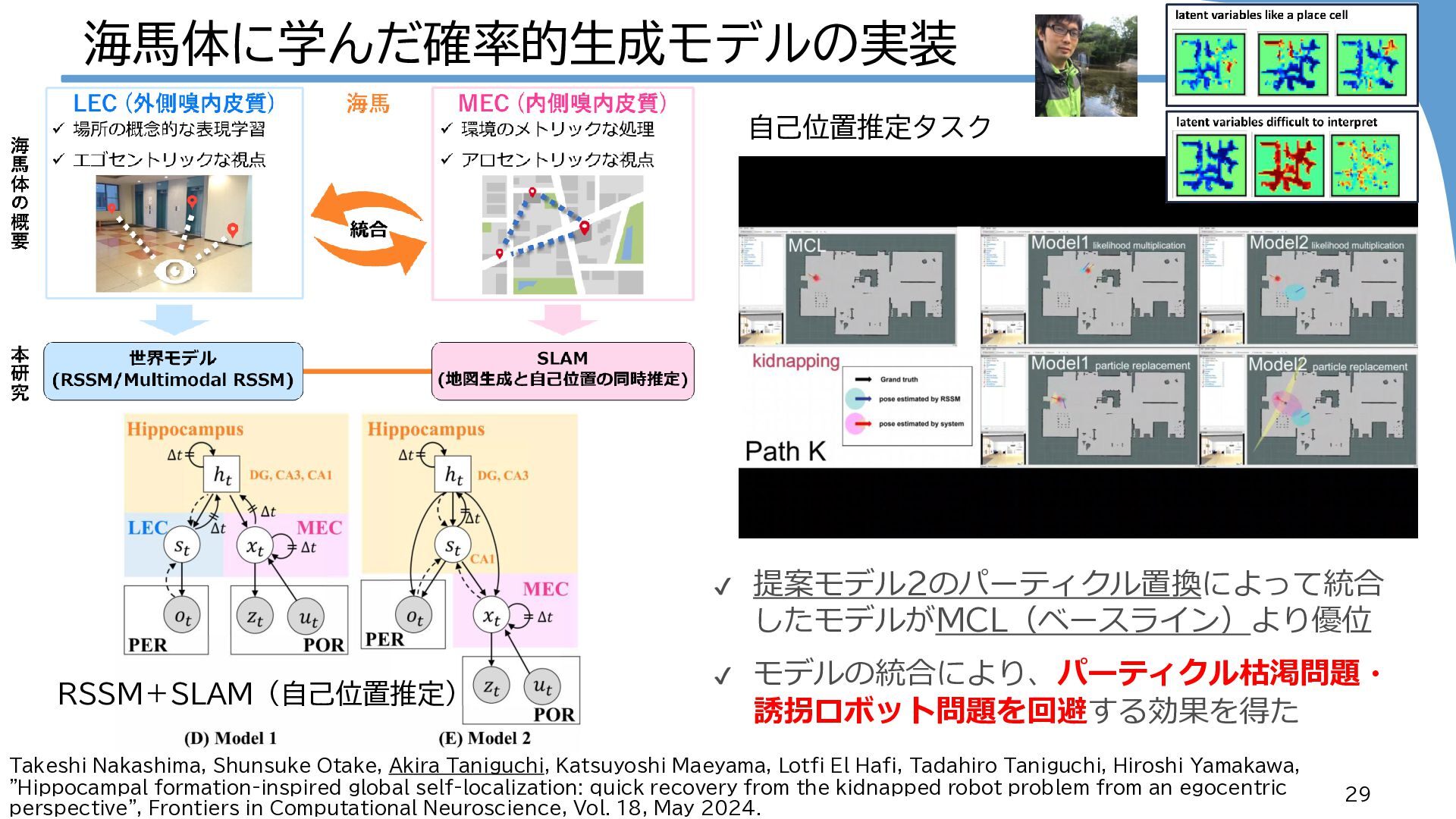
Shunsuke Otake, Akira Taniguchi, Katsuyoshi Maeyama, Lotfi El Hafi, Tadahiro Taniguchi, Hiroshi Yamakawa, "Hippocampal formation-inspired global self-localization: quick recovery from the kidnapped robot problem from an egocentric perspective", Frontiers in Computational Neuroscience, Vol. 18, May 2024. 29 RSSM+SLAM(自己位置推定)
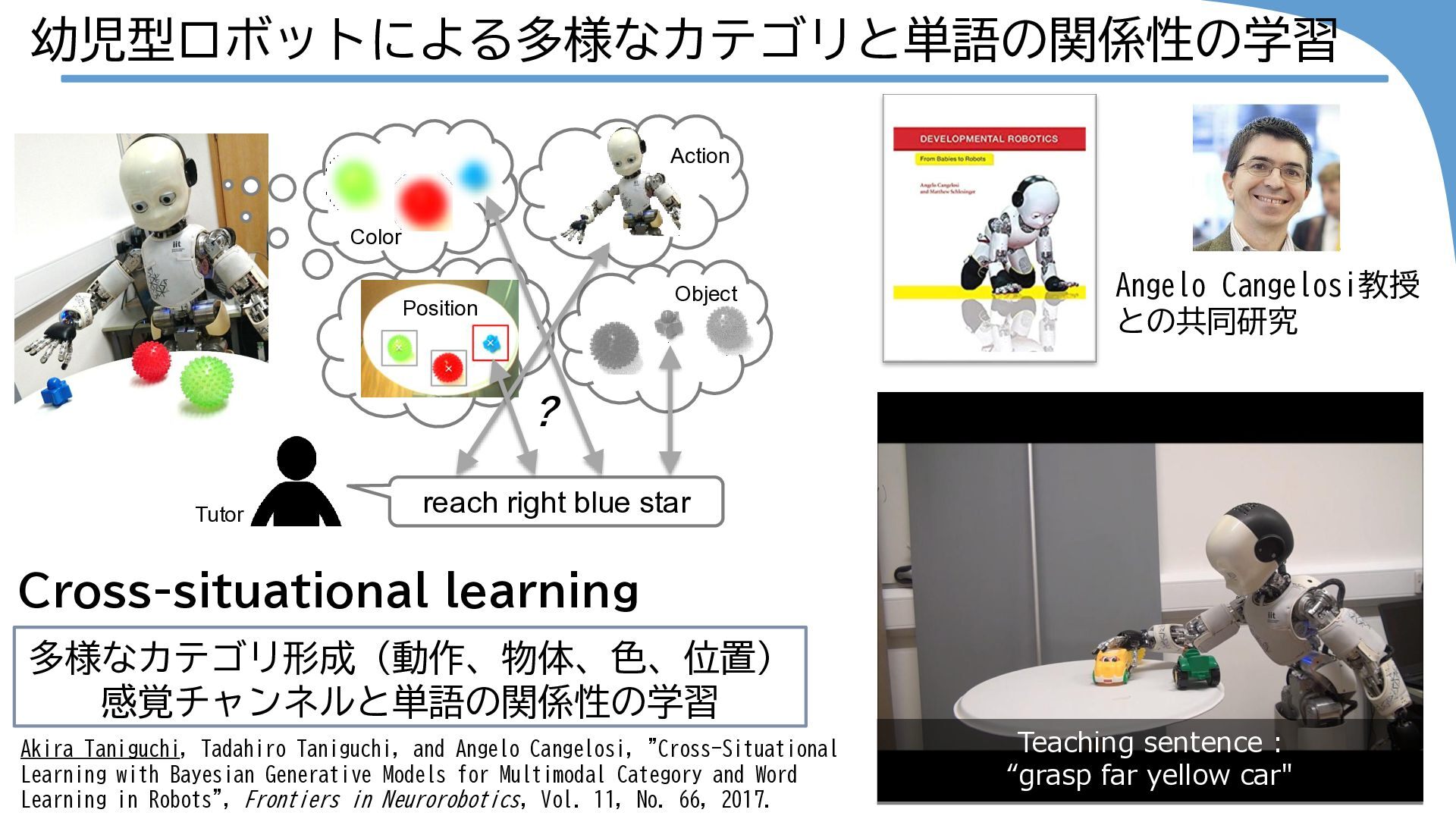
Tutor Position ? Cross-situational learning Akira Taniguchi, Tadahiro Taniguchi, and Angelo Cangelosi, "Cross-Situational Learning with Bayesian Generative Models for Multimodal Category and Word Learning in Robots", Frontiers in Neurorobotics, Vol. 11, No. 66, 2017. Angelo Cangelosi教授 との共同研究 Teaching sentence : “grasp far yellow car" 31
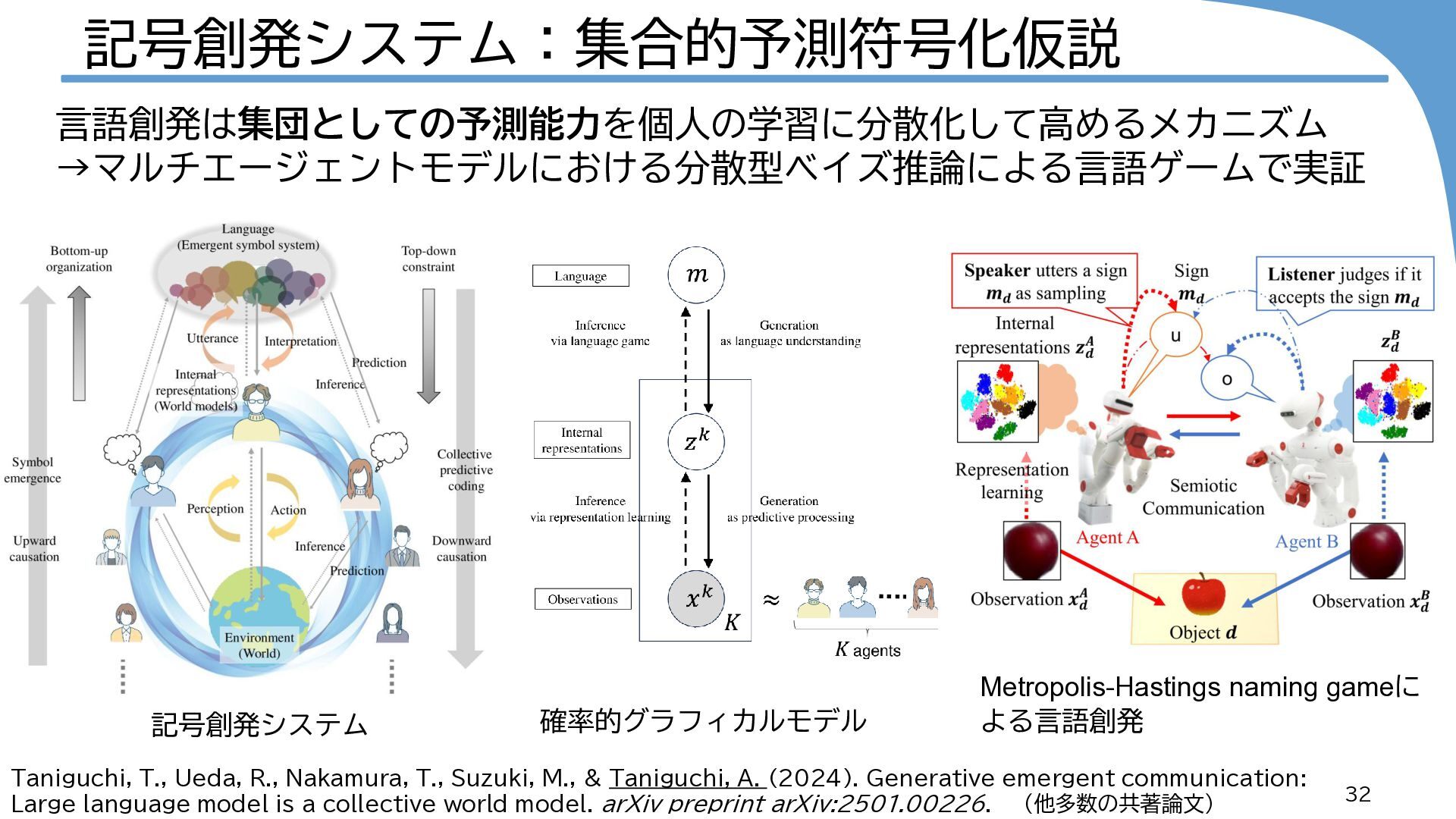
Taniguchi, A. (2024). Generative emergent communication: Large language model is a collective world model. arXiv preprint arXiv:2501.00226. (他多数の共著論文) Metropolis-Hastings naming gameに よる言語創発 記号創発システム 確率的グラフィカルモデル 言語創発は集団としての予測能力を個人の学習に分散化して高めるメカニズム →マルチエージェントモデルにおける分散型ベイズ推論による言語ゲームで実証 32
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![なぜ確率的生成モデル? • グラフィカルモデルによって構造を容易 に可視化できる • PGM同士を統合しやすい (Neuro-SERKETフレームワーク [Taniguchi 2020] )](https://files.speakerdeck.com/presentations/9af1c9bb2726467481562c61fb409e1f/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
![SpCoSLAM [Taniguchi 17] 15 [Taniguchi 17] Taniguchi, A., et al.](https://files.speakerdeck.com/presentations/9af1c9bb2726467481562c61fb409e1f/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}