Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Gaussian_Process_Models.pdf
Search
ディップ株式会社
PRO
October 29, 2025
Technology
70
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Gaussian_Process_Models.pdf
ディップ株式会社
PRO
October 29, 2025
More Decks by ディップ株式会社
See All by ディップ株式会社
はじめての環境構築!デプロイ〜Docker基礎を学べるワークショップ!
dip_tech
PRO
0
36
【TSKaigi2026登壇資料】決定論的な型チェックへ Go 製コンパイラによる10倍速の裏側で stableTypeOrdering から見える並列化への挑戦
dip_tech
PRO
2
380
【TSKaigi2026登壇資料】バイトル」のTypeScriptリニューアル — 積み上がったレガシーとパフォーマンスに挑む現在地
dip_tech
PRO
1
350
【新卒研修】ライブデモ + compose.yaml読解_講義資料
dip_tech
PRO
0
240
【ディップ|26年新卒研修資料】OpenAPI/Swagger REST API研修
dip_tech
PRO
0
380
【ディップ|26年新卒研修資料】Docker_ハンズオン研修
dip_tech
PRO
0
350
【ディップ|26年新卒研修資料】TDD実装演習
dip_tech
PRO
0
400
ハッカソンや個人開発で何作る? テーマ発見〜アイデア発想ハンズオン! 技育CAMPアカデミア
dip_tech
PRO
0
87
技育祭登壇|「AIを使える」は、勘違いだった。 コードが書けてもプロになれなかった僕の1年戦記
dip_tech
PRO
0
140
Other Decks in Technology
See All in Technology
GoとSIMDとWasmの今。
askua
3
520
AIを「創る」と「使う」の循環 — HRテックが実践するリアルなAI組織実装
taketo957
0
1.8k
AIソロプレナー時代に2ヶ月で20人増員した事業創造会社の開発組織の話
miyatakoji
0
260
ABEMA の Datadog × OTel 基盤、 中から見るか? 外から見るか?
tetsuya28
0
110
価格.comをAI駆動で全面刷新する ー 30年分の技術的負債を返し、次の30年の土台をつくる ー / AI Engineering Summit Tokyo 2026
tkyowa
51
57k
「コーディング」しない人のための Claude Code 入門 ChatGPT の次の一歩 — 業務に組み込む 育成・共有・自動化
rfdnxbro
2
1.2k
中期計画、2回作ってみた ~業務委託と正社員、両方の視点から~
demaecan
1
450
ポケモンの型をTypeScriptの型システムで表現してみた
subroh0508
0
360
Snowflakeと仲良くなる第一歩
coco_se
3
270
LLMにもCAP定理があるという話
harukasakihara
0
250
TypeScript Compiler APIとPHP-Parserを活用し、TypeScriptとPHPで型を共有する
shuta13
0
370
LLMと共に進化するプロセスを目指して
ymatsuwitter
12
3.7k
Featured
See All Featured
Reality Check: Gamification 10 Years Later
codingconduct
0
2.2k
HU Berlin: Industrial-Strength Natural Language Processing with spaCy and Prodigy
inesmontani
PRO
0
400
Being A Developer After 40
akosma
91
590k
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
The Illustrated Children's Guide to Kubernetes
chrisshort
51
52k
Visualizing Your Data: Incorporating Mongo into Loggly Infrastructure
mongodb
49
10k
The SEO Collaboration Effect
kristinabergwall1
1
480
The Cost Of JavaScript in 2023
addyosmani
55
10k
How to Talk to Developers About Accessibility
jct
2
220
DBのスキルで生き残る技術 - AI時代におけるテーブル設計の勘所
soudai
PRO
65
55k
Navigating the Design Leadership Dip - Product Design Week Design Leaders+ Conference 2024
apolaine
1
340
B2B Lead Gen: Tactics, Traps & Triumph
marketingsoph
0
140
Transcript
Bayesian Data Analysis §21 Gaussian Process Models 久保知生 商品開発本部 DataBrain課
2024-12-02
(復習)パラメトリックモデル • 以下のパラメトリックな設定を考える。 – 𝑦𝑖 ∈ 𝒴 – 𝑦𝑖 |𝐹
∼ 𝑖𝑖𝑑 𝐹 – 𝐹 ∈ ℱ∗, 𝑤ℎ𝑒𝑟𝑒 ℱ∗ = 𝑁 𝑦|𝜇, 𝜏2 • ℱ∗はℱ = {𝒴上のすべての分布}に比べて小さいことがわか る。
(復習)ノンパラメトリックモデル • ノンパラメトリックベイズでは、より大きなℱの部分集合を 考える。 • そこで、2つのアプローチが考えられる。 – 基底関数によるアプローチ • 𝑔
𝑥; 𝜃 = σ𝑘=1 𝐾 𝜃𝑘 ℎ𝑘 𝑥 • ただし、ℎ𝑘 𝑥 は基底関数。 – process realizationによるアプローチ • {𝑔 𝑥 : 𝑥 ∈ 𝒳} • 例えば、𝑔 𝑥 はガウス過程からの観測結果。
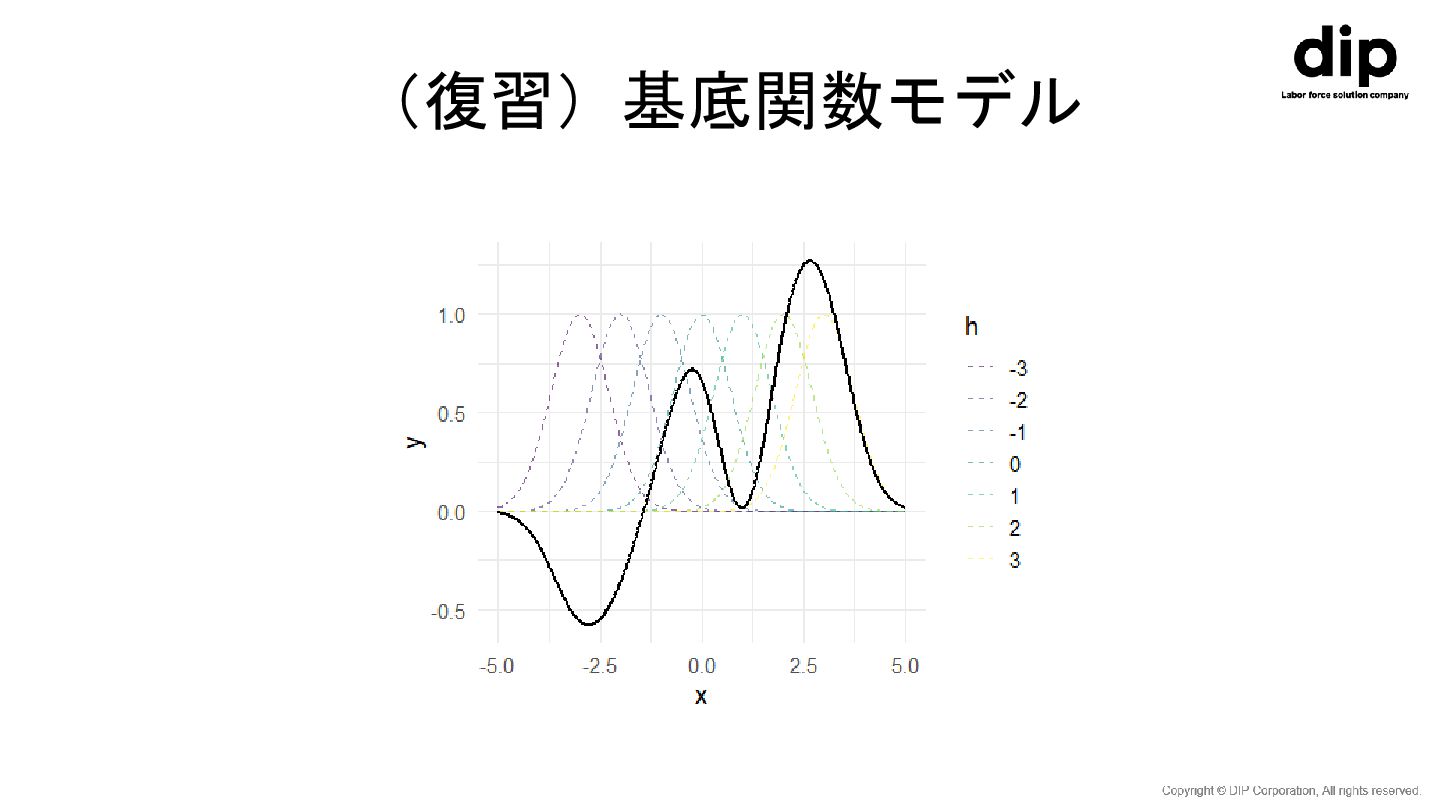
(復習)基底関数モデル • ガウス分布の形をした基底関数を用意する。 – 𝜙ℎ 𝑥 = exp{− 𝑥−𝑥ℎ 2
𝑙2 } – 𝑥ℎ ∈ {−𝐻, ⋯ , −2, −1,0,1,2, ⋯ , 𝐻} • この基底関数を𝑥ℎ 上にグリッド状に多数配置し、𝑤ℎ ∈ 𝑅で適 当に重みづける。 – 𝑦 = 𝛴ℎ=−𝐻 𝐻 𝑤ℎ ⋅ exp{− 𝑥−𝑥ℎ 2 𝜎2 } • これにより、ほとんど任意の形の関数を表すことができる。
(復習)基底関数モデル
(復習)基底関数モデル • ノットの数(ℎ)が多すぎると計算が大変。 – 入力𝑥の次元が増えてパラメータ𝑤の次元が指数的に増える現 象を「次元の呪い」という。 • ノットの数(ℎ)が少なすぎると柔軟な回帰モデルを表 現ができない。
ガウス過程 • 簡単のため、誤差なく𝑦を𝑥の特徴ベクトル𝜙 𝑥 = 𝜙0 𝑥 , ⋯ ,
𝜙𝐻 𝑥 ′に回帰することを考える。 – 𝑦 = 𝑤0 𝜙0 𝑥 + ⋯ + 𝑤𝐻 𝜙𝐻 𝑥 – 行列形式では:𝑦 = 𝛷𝑤 • 𝑤 ∼ 𝑁 0, 𝜆2𝐼 • このとき、𝑦の期待値と分散はそれぞれ – 𝐸 𝑦 = 𝐸 𝛷𝑤 = 𝛷𝐸 𝑤 = 0 – 𝑉 𝑦 = 𝐸 𝑦𝑦′ − 𝐸 𝑦 𝐸 𝑦 ′ = 𝐸{ 𝛷𝑤 𝛷𝑤 ′} = 𝛷 𝑤𝑤′ 𝛷′ = 𝜆2𝛷𝛷′
ガウス過程 • したがって、𝑦 ∼ 𝑁 0, 𝜆2𝛷𝛷′ – 𝑦の分布を考えるにあたり、𝑤が消去されていることに注意。 •
𝐾 = 𝜆2𝛷𝛷′とおくと、𝐾の 𝑛, 𝑛′ 要素は以下で与えられる。 – 𝐾𝑛𝑛′ = 𝜆2𝜙 𝑥𝑛 ′𝜙 𝑥𝑛′ – つまり、𝐾はあらゆる入力𝜙0 𝑥 , ⋯ , 𝜙𝐻 𝑥 の共分散。 • 𝐾𝑛𝑛′ の値を与える関数をカーネル関数という。 – 𝐾𝑛𝑛′ = 𝑘 𝑥𝑛 , 𝑥𝑛′ = 𝜆2𝜙 𝑥𝑛 ′𝜙 𝑥𝑛′
ガウス過程 • 無限個の入力𝑥 = 𝑥1 , 𝑥2 , ⋯ に対応する出力𝑓
= 𝑓 𝑥1 , 𝑓 𝑥2 , ⋯ の同時分布が多変量ガウス過程に従う とき、以下のように表現する。 – 𝑓 ∼ 𝐺𝑃 𝑚, 𝐾 • 入力𝑥間の類似度は、以下で表される。 – 𝑘 𝑥, 𝑥′ = 𝜏exp{− 𝑥−𝑥ℎ 2 2𝑙2 }
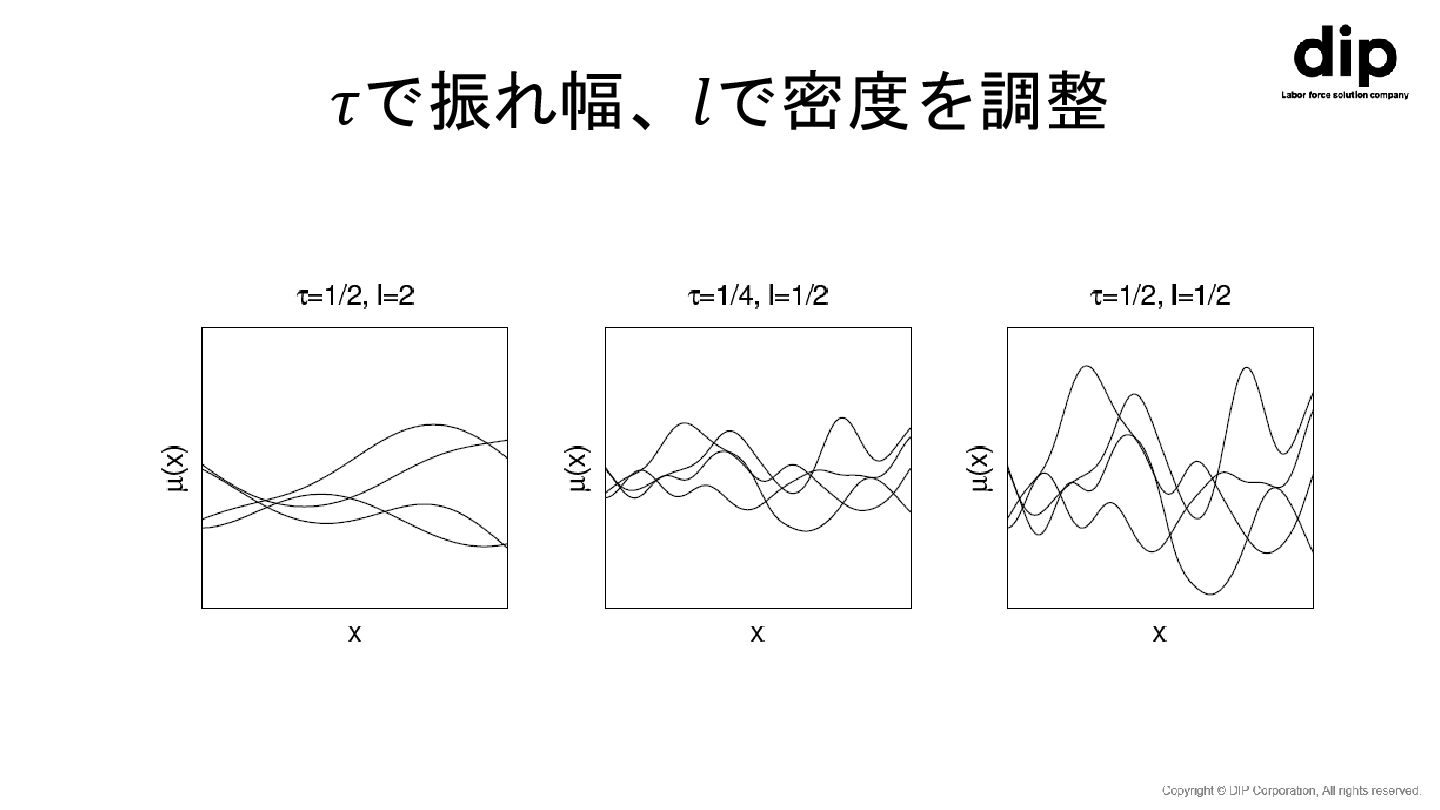
𝜏で振れ幅、𝑙で密度を調整
さまざまなカーネル • 線形カーネル – 𝑘 𝑥, 𝑥′ = 𝑥𝑇𝑥′ •
指数カーネル – 𝑘 𝑥, 𝑥′ = exp{− 𝑥−𝑥′ 𝑙 } • 周期カーネル – 𝑘 𝑥, 𝑥′ = exp{𝜏cos 𝑥−𝑥′ 𝑙 }
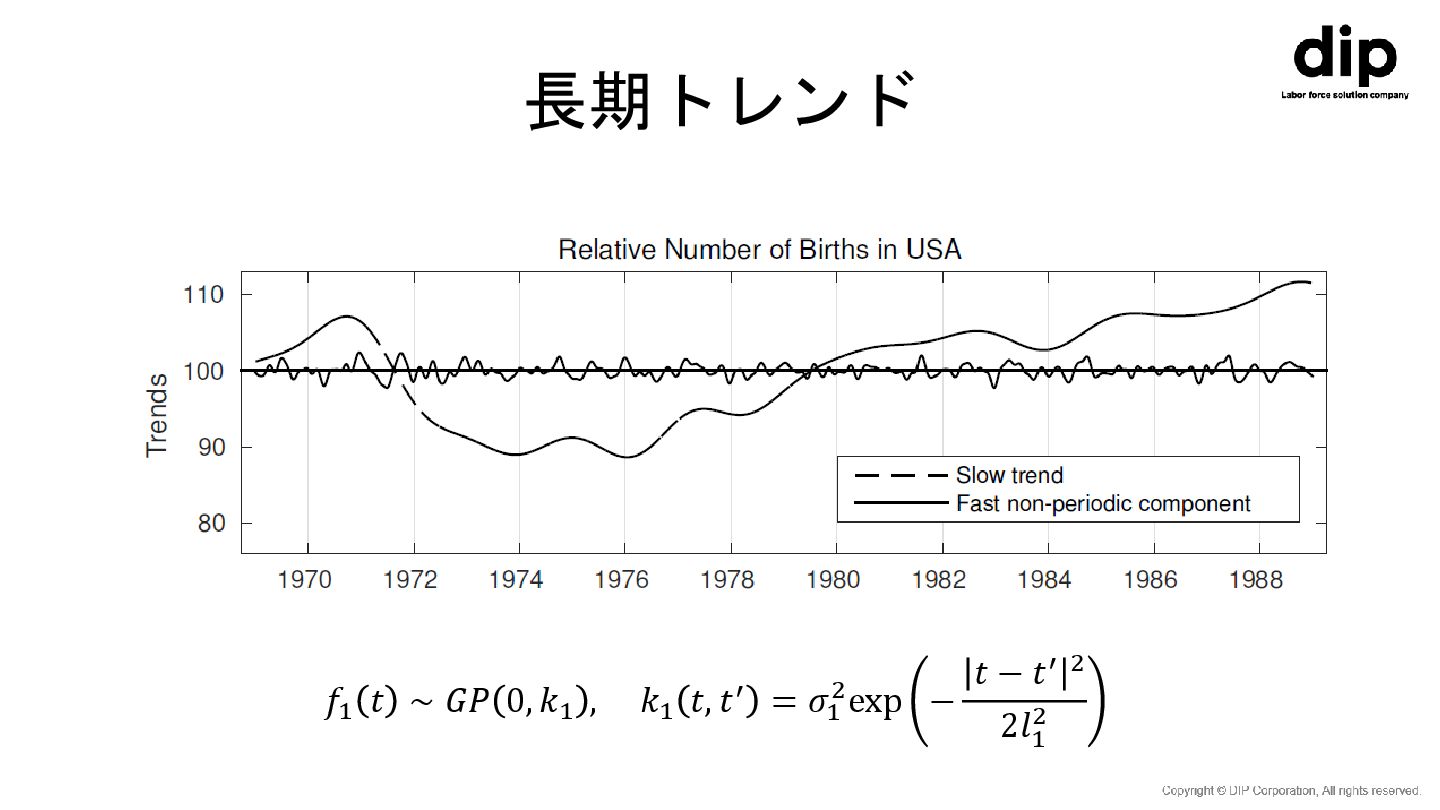
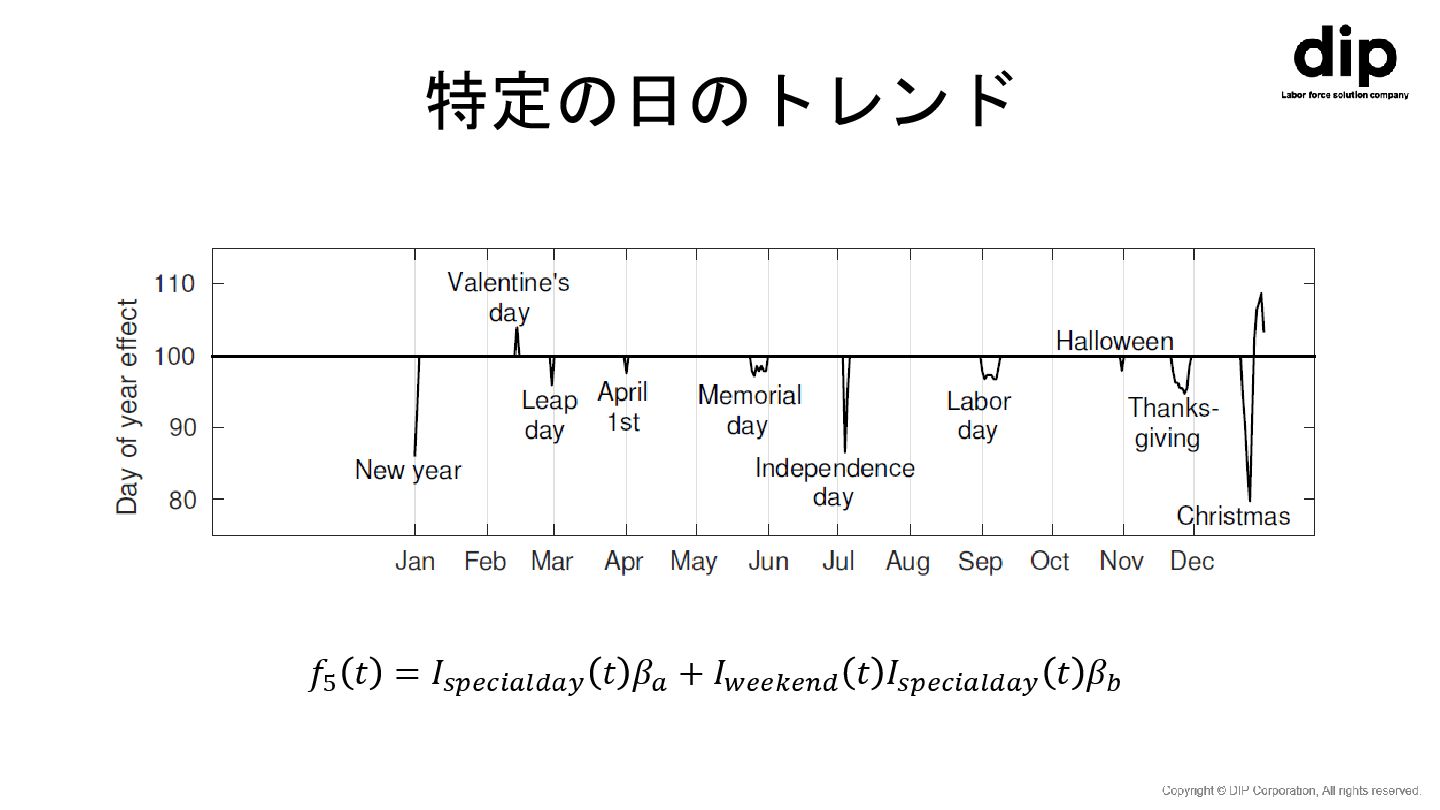
例:出生日の分析 • 誕生日ごとの誕生頻度が知りたい。 • 1969年-1988年のアメリカが対象。 • 𝑦𝑡 𝑡 = 𝑓1
𝑡 + 𝑓2 𝑡 + 𝑓3 𝑡 + 𝑓4 𝑡 + 𝑓5 𝑡 + 𝜖𝑡 – 𝑡は1969年1月1日から数えた日数
長期トレンド 𝑓1 𝑡 ∼ 𝐺𝑃 0, 𝑘1 , 𝑘1 𝑡,
𝑡′ = 𝜎1 2exp − 𝑡 − 𝑡′ 2 2𝑙1 2
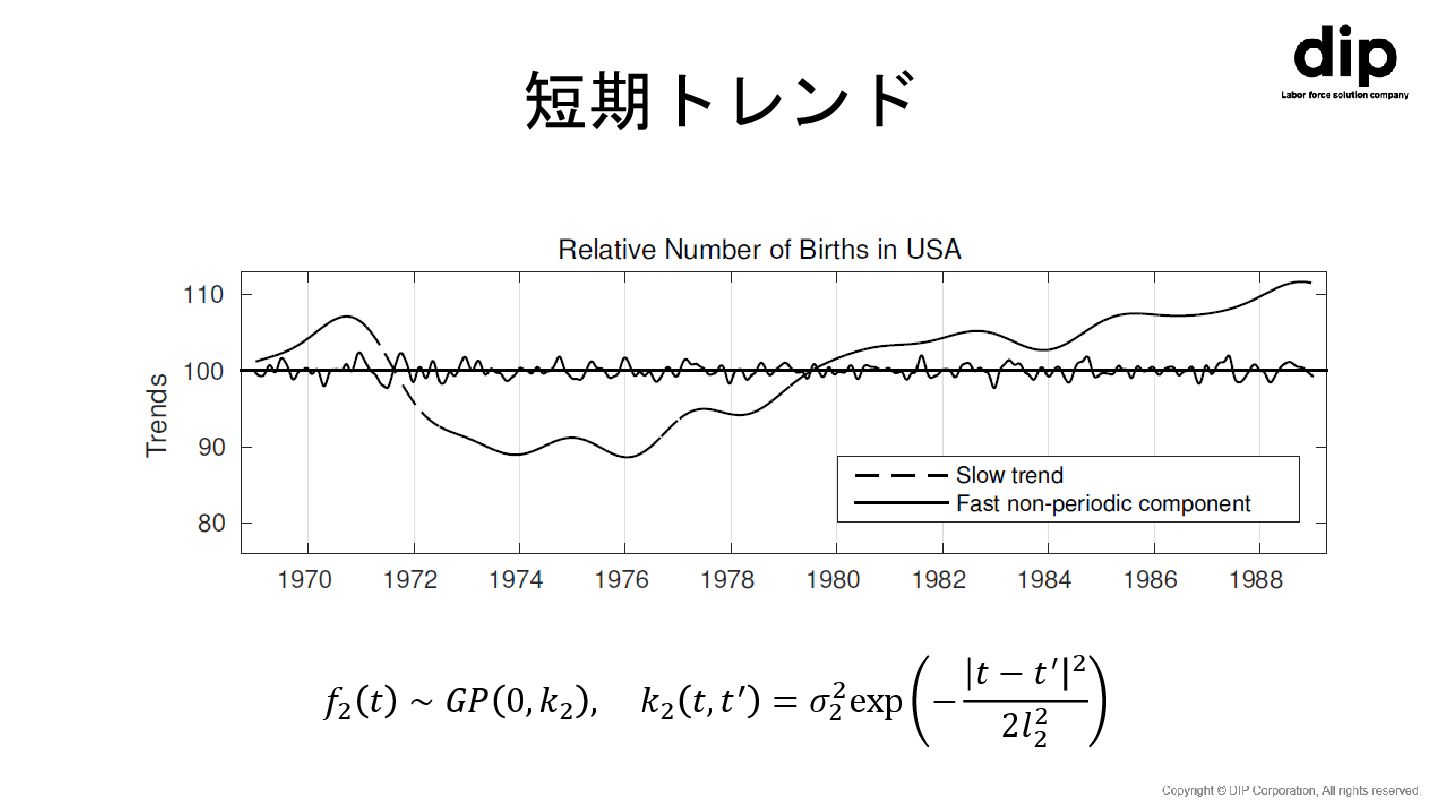
短期トレンド 𝑓2 𝑡 ∼ 𝐺𝑃 0, 𝑘2 , 𝑘2 𝑡,
𝑡′ = 𝜎2 2exp − 𝑡 − 𝑡′ 2 2𝑙2 2
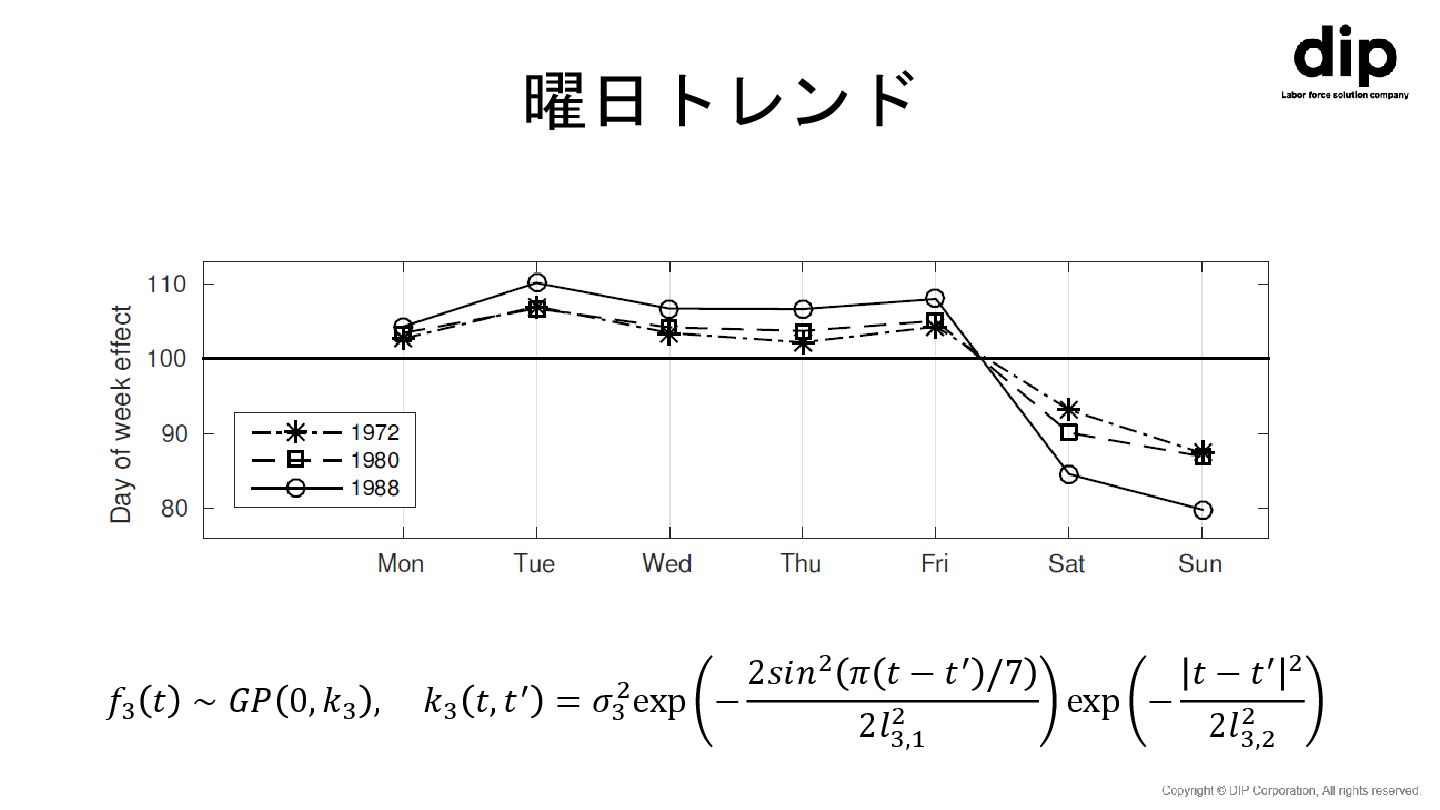
曜日トレンド 𝑓3 𝑡 ∼ 𝐺𝑃 0, 𝑘3 , 𝑘3 𝑡,
𝑡′ = 𝜎3 2exp − 2𝑠𝑖𝑛2 𝜋 𝑡 − 𝑡′ /7 2𝑙3,1 2 exp − 𝑡 − 𝑡′ 2 2𝑙3,2 2
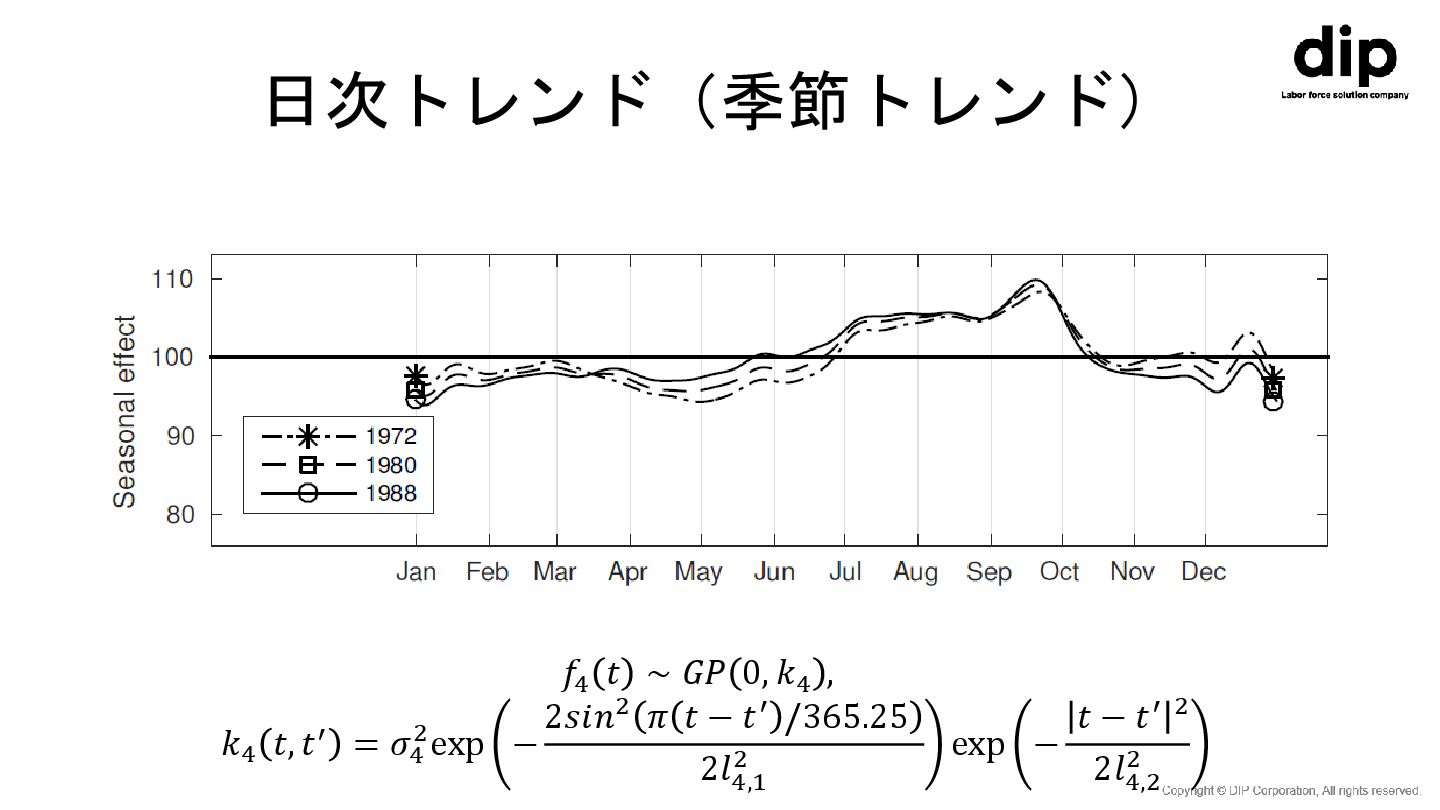
日次トレンド(季節トレンド) 𝑓4 𝑡 ∼ 𝐺𝑃 0, 𝑘4 , 𝑘4 𝑡,
𝑡′ = 𝜎4 2exp − 2𝑠𝑖𝑛2 𝜋 𝑡 − 𝑡′ /365.25 2𝑙4,1 2 exp − 𝑡 − 𝑡′ 2 2𝑙4,2 2
特定の日のトレンド 𝑓5 𝑡 = 𝐼𝑠𝑝𝑒𝑐𝑖𝑎𝑙𝑑𝑎𝑦 𝑡 𝛽𝑎 + 𝐼𝑤𝑒𝑒𝑘𝑒𝑛𝑑 𝑡
𝐼𝑠𝑝𝑒𝑐𝑖𝑎𝑙𝑑𝑎𝑦 𝑡 𝛽𝑏
APPENDIX
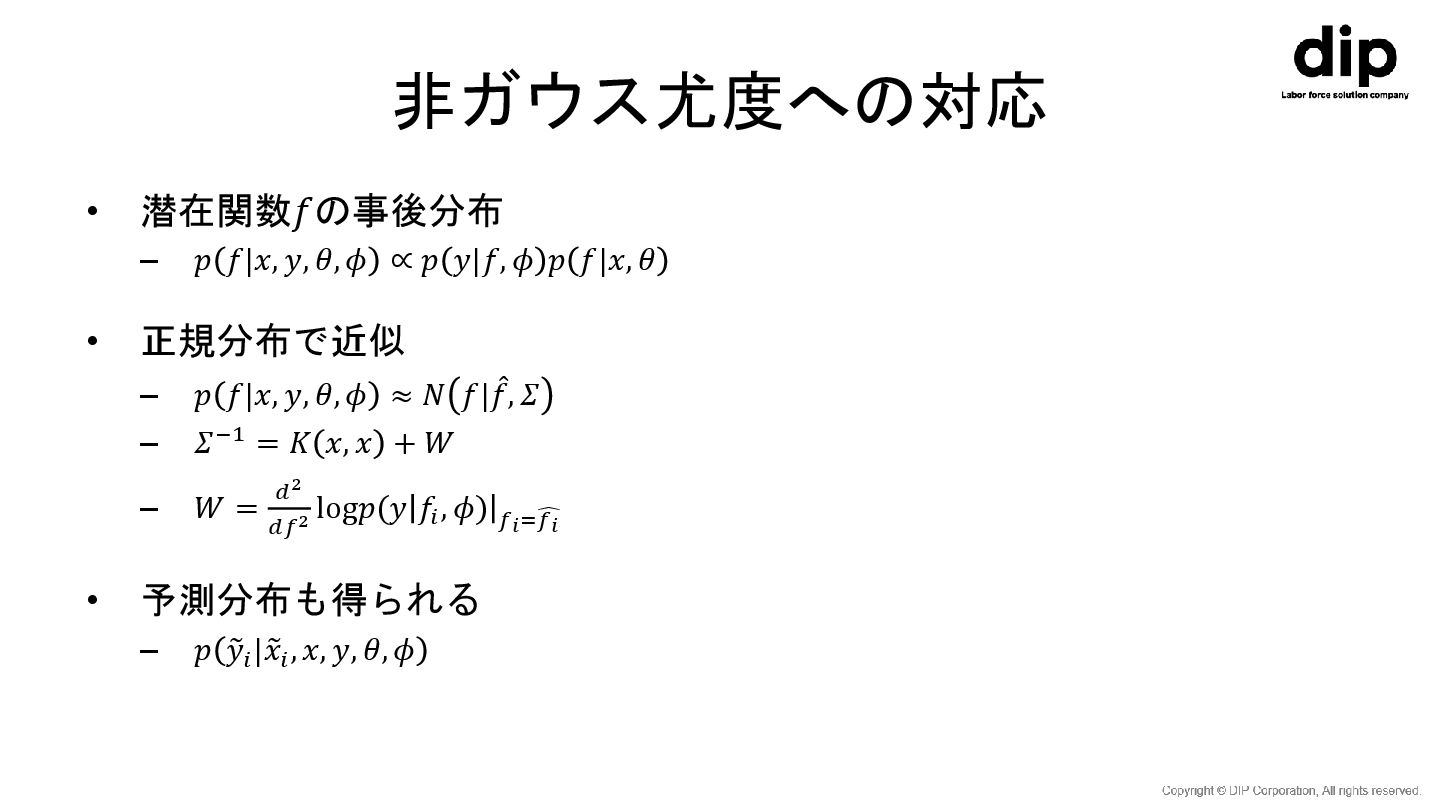
非ガウス尤度への対応 • 潜在関数𝑓の事後分布 – 𝑝 𝑓|𝑥, 𝑦, 𝜃, 𝜙 ∝
𝑝 𝑦|𝑓, 𝜙 𝑝 𝑓|𝑥, 𝜃 • 正規分布で近似 – 𝑝 𝑓|𝑥, 𝑦, 𝜃, 𝜙 ≈ 𝑁 𝑓| መ 𝑓, 𝛴 – 𝛴−1 = 𝐾 𝑥, 𝑥 + 𝑊 – 𝑊 = 𝑑2 𝑑𝑓2 log𝑝(𝑦 𝑓𝑖 , 𝜙) 𝑓𝑖= 𝑓𝑖 • 予測分布も得られる – 𝑝 𝑦𝑖 | 𝑥𝑖 , 𝑥, 𝑦, 𝜃, 𝜙
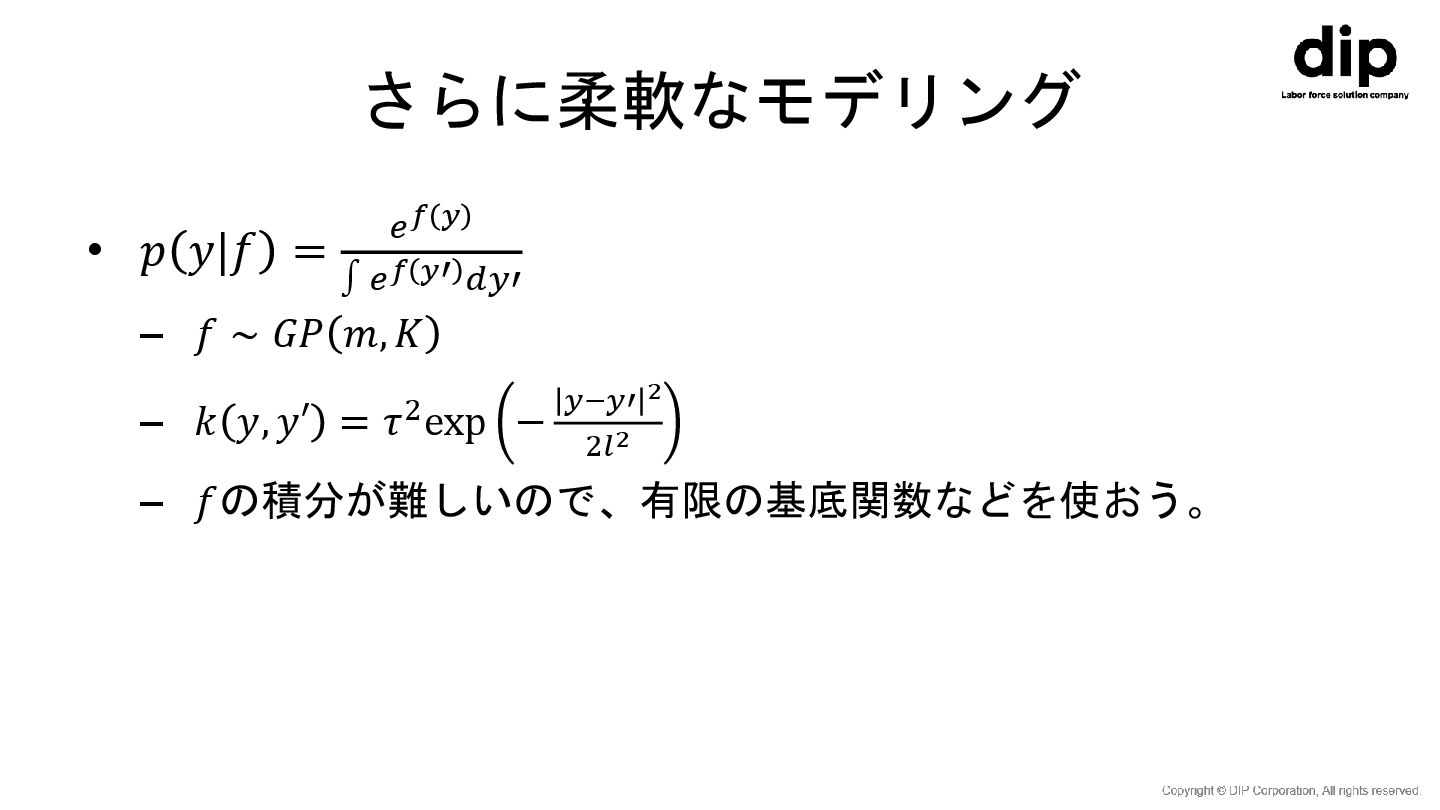
さらに柔軟なモデリング • 𝑝 𝑦|𝑓 = 𝑒𝑓 𝑦 ∫ 𝑒𝑓 𝑦′
𝑑𝑦′ – 𝑓 ∼ 𝐺𝑃 𝑚, 𝐾 – 𝑘 𝑦, 𝑦′ = 𝜏2exp − 𝑦−𝑦′ 2 2𝑙2 – 𝑓の積分が難しいので、有限の基底関数などを使おう。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}