Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
生産システムの運用を支える人と機械(計算機)の知的協働
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
hajimizu
December 13, 2020
Research
220
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
生産システムの運用を支える人と機械(計算機)の知的協働
「システム学を考える会・境界と関係性を視座とするシステムズアプローチ調査研究会 合同講演会」で話題提供した際のスライドの抜粋です.
hajimizu
December 13, 2020
More Decks by hajimizu
See All by hajimizu
Lecture slides for POM 2-13
hajimizu
1
410
Lecture slides for POM 2-14
hajimizu
0
380
Lecture slides for POM 2-2
hajimizu
0
720
Lecture slides for POM 2-3
hajimizu
0
450
Lecture slides for POM 2-4
hajimizu
0
450
Lecture slides for POM 2-5
hajimizu
0
410
Lecture slides for POM 2-6
hajimizu
0
440
Lecture slides for POM 2-7
hajimizu
0
380
Lecture slides for POM 2-9
hajimizu
0
330
Other Decks in Research
See All in Research
2026-01-30-MandSL-textbook-jp-cos-lod
yegusa
1
1.3k
姫路市 -都市OSの「再実装」-
hopin
0
1.7k
LLM の Attention 機構まとめ — 数式・計算量・メモリ
puwaer
7
2k
オーストリア流 都市の公共交通サービス水準評価@公共交通オープンデータ最前線2026
trafficbrain
0
180
通時的な類似度行列に基づく単語の意味変化の分析
rudorudo11
0
310
2026年度 生成AI を活用した論文執筆ガイド/ワークショップ / 2026 Academic Year Guide to Writing Papers Using Generative AI - Workshop
ks91
PRO
0
170
第12回人と環境にやさしい交通をめざす全国大会/熊本都市圏「車1割削減、渋滞半減、公共交通2倍」をめざして
trafficbrain
0
110
社内データ分析AIエージェントを できるだけ使いやすくする工夫
fufufukakaka
1
1.1k
LINEヤフー データサイエンス Meetup「三井物産コモディティ予測チャレンジ」の舞台裏-AlpacaTechパート
gamella
1
550
ペットのかわいい瞬間を撮影する オートシャッターAIアプリへの スマートラベリングの適用
mssmkmr
0
510
量子コンピュータの紹介
oqtopus
0
320
セマンティック通信勉強会 6Gに向けたデバイス間効率的な通信の技術紹介・課題・今後展望
satai
3
150
Featured
See All Featured
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
160
ラッコキーワード サービス紹介資料
rakko
1
3.6M
We Analyzed 250 Million AI Search Results: Here's What I Found
joshbly
1
1.3k
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
Dealing with People You Can't Stand - Big Design 2015
cassininazir
367
27k
Google's AI Overviews - The New Search
badams
0
1k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
440
Building a Scalable Design System with Sketch
lauravandoore
463
34k
Music & Morning Musume
bryan
47
7.2k
[SF Ruby Conf 2025] Rails X
palkan
2
1.1k
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.8k
From π to Pie charts
rasagy
0
200
Transcript
⽣産システムの運⽤を⽀える ⼈と機械(計算機)の知的協働 2020年12⽉13⽇(⽇) システム学を考える会・境界と関係性を視座とするシ ステムズアプローチ調査研究会 合同講演会 ⽔⼭ 元 @⻘⼭学院⼤学 理⼯学部
経営システム⼯学科
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 1 Hajime Mizuyama
(広義の)⽣産システムとその運⽤ • ⽣産システムとは, – 原材料,部品,製品などの対象物に, – 加⼯機,搬送機,作業者などの資源によって, – 加⼯,組⽴,運搬などの作業を施し, •
対象物の形状,位置などの属性を順次変化させていくことで,価値 を⽣み出すシステムである. • 同じ構成のシステムであっても,その性能(⽣産率,コスト,納期 遵守率など)は,運⽤の巧拙に⼤きく依存する. • ⽣産システムの運⽤とは,いつどの資源でどの対象物にどの作業を 実施するかについての意思決定である(作業開始のトリガーとなる 作業指⽰,その前提となる作業スケジューリングなど). 2 Hajime Mizuyama
⼈と機械(計算機)の知的協働 • 運⽤の意思決定を,数理的な最適化問題として定式化し,計算機で 処理できるようにする試みは,従来から広く⾏われてきた. • 完全に計算機任せにはせず,対話的にパラメータを調整しながら求 解を繰り返したり,得られた解を⼈⼿で調整することも多い. • 現場での実際の作業指⽰は,職⻑さんや作業者の⽅⾃⾝の判断に委 ねられていることも多い.
• その場合でも,計算機によって加⼯・編集された情報の提⽰など, 何らかの意思決定⽀援機能が提供されていることもある. • シンプルなディスパッチングルールやカンバンなどの,機械的な ルールやロジックによって運⽤されている現場も多い. • その場合でも,状況に応じて,パラメータの調整やルールの⾒直し が必要になる. 3 Hajime Mizuyama
運⽤の意思決定における機械と⼈の対⽐ 機械の意思決定 • 数理的な最適化アルゴリズム を利⽤することができる • 明確に定式化された問題以外 は扱いづらい • 必要な情報を事前に明⽰し,
収集しておく必要がある • 外部との境界条件はハードな 制約条件として扱われる ⼈の意思決定 • 暗黙的なルールやヒューリス ティックに頼ることが多い • 曖昧な問題や主観的な問題も そのまま扱えることがある • どのような情報でもその場で 拾い上げて利⽤できる • 境界条件を交渉可能なソフト な制約条件として扱える 4 双⽅に⻑所と短所があり,優劣を⽐較することよりも,状況に応じて 適材適所で組み合わせて活⽤することを考えるべきである.
問題の設定と解決としての理解 運⽤の意思決定とは, – 解くべき問題のクラスを設定し, – 状況に応じてその問題のインスタンスを構成し, – ある解法を適⽤してその問題を解決することである,と考える. ⼈の貢献の源泉は, –
ある種の難しい問題に対してある程度有効に機能する暗黙的な ヒューリスティック解法 – センサが設置されていない情報の五感による取得 – ブラックボックス関数によるインスタンスの補完 – 解くべき問題のクラス⾃体が未定義あるいはブラックボックス であるような状況への対処 5 Hajime Mizuyama
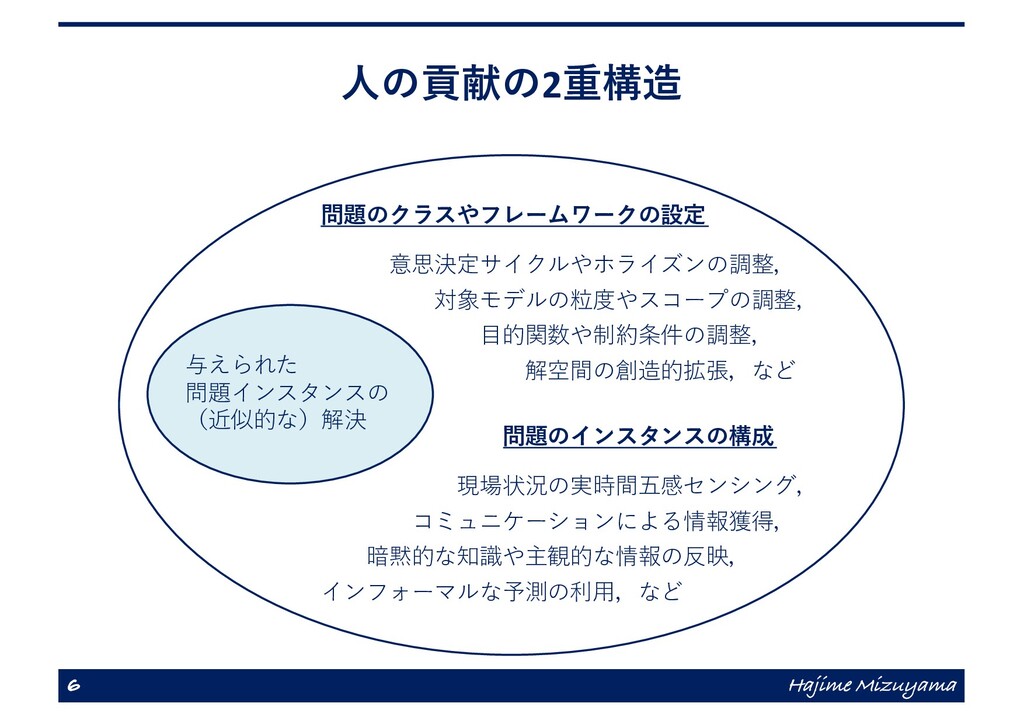
⼈の貢献の2重構造 6 Hajime Mizuyama 与えられた 問題インスタンスの (近似的な)解決 問題のクラスやフレームワークの設定 意思決定サイクルやホライズンの調整, 対象モデルの粒度やスコープの調整,
⽬的関数や制約条件の調整, 解空間の創造的拡張,など 問題のインスタンスの構成 現場状況の実時間五感センシング, コミュニケーションによる情報獲得, 暗黙的な知識や主観的な情報の反映, インフォーマルな予測の利⽤,など
Industry 4.0 で何が変わるか? • IOT:実時間でセンシング可能(したがって,計算機アルゴリズム に取り込むことが容易)な情報が広がる. • CPS:IOTでセンシングしたデータを統合することでシステム全体の 状況をより詳細な粒度で把握できるようになる. •
Big Data:⼤量に蓄積されていく上記のデータの履歴に基づいて 様々な予測モデルが得られるようになる. • 機械(計算機)で処理可能な運⽤の意思決定が増える. • 機械(計算機)で処理可能な意思決定問題のスコープが広がる. • ⼈の役割はどうなるの?(ex. 完全⾃動化・無⼈化を⽬指すべきな のか,⼈の意思決定⽀援のあり⽅の⾼度化を⽬指すべきなのか?) 7 Hajime Mizuyama
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 8 Hajime Mizuyama
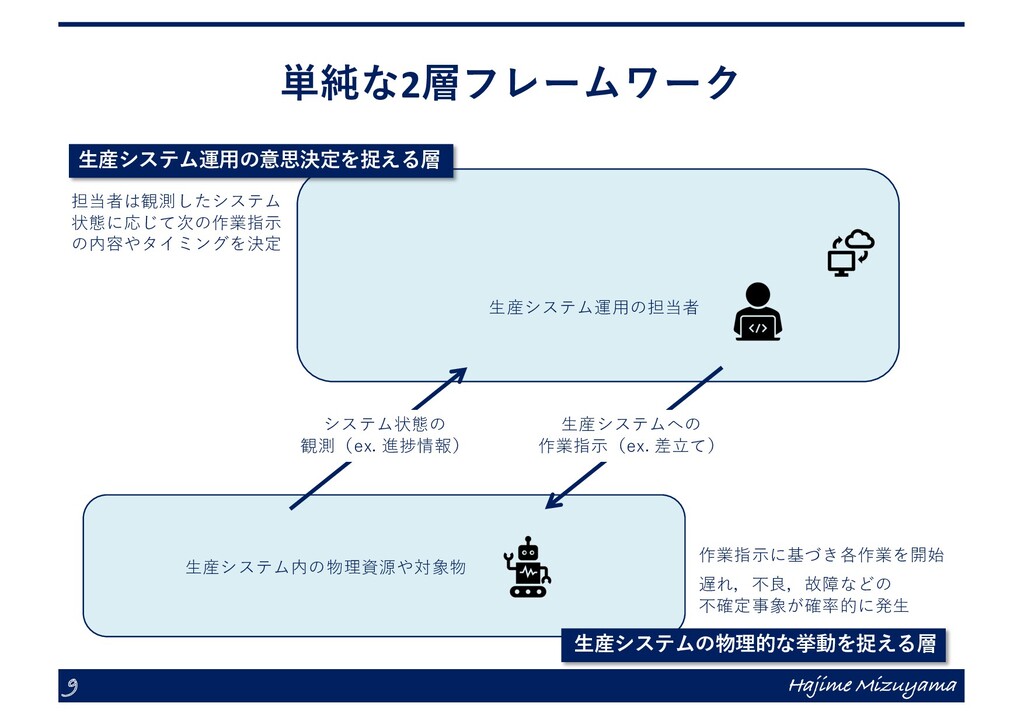
単純な2層フレームワーク 9 Hajime Mizuyama 作業指⽰に基づき各作業を開始 遅れ,不良,故障などの 不確定事象が確率的に発⽣ ⽣産システムへの 作業指⽰(ex. 差⽴て)
システム状態の 観測(ex. 進捗情報) 担当者は観測したシステム 状態に応じて次の作業指⽰ の内容やタイミングを決定 ⽣産システム運⽤の意思決定を捉える層 ⽣産システム内の物理資源や対象物 ⽣産システム運⽤の担当者 ⽣産システムの物理的な挙動を捉える層
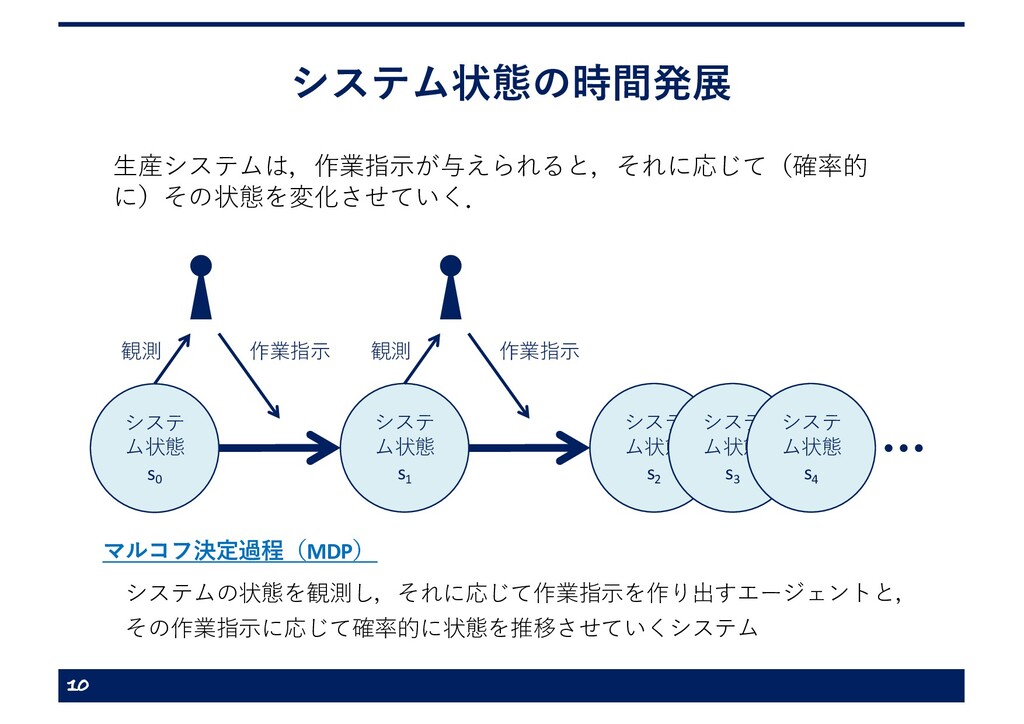
システム状態の時間発展 ⽣産システムは,作業指⽰が与えられると,それに応じて(確率的 に)その状態を変化させていく. 10 システ ム状態 s0 観測 システ ム状態
s1 作業指⽰ システ ム状態 s2 システ ム状態 s3 システ ム状態 s4 マルコフ決定過程(MDP) システムの状態を観測し,それに応じて作業指⽰を作り出すエージェントと, その作業指⽰に応じて確率的に状態を推移させていくシステム 観測 作業指⽰
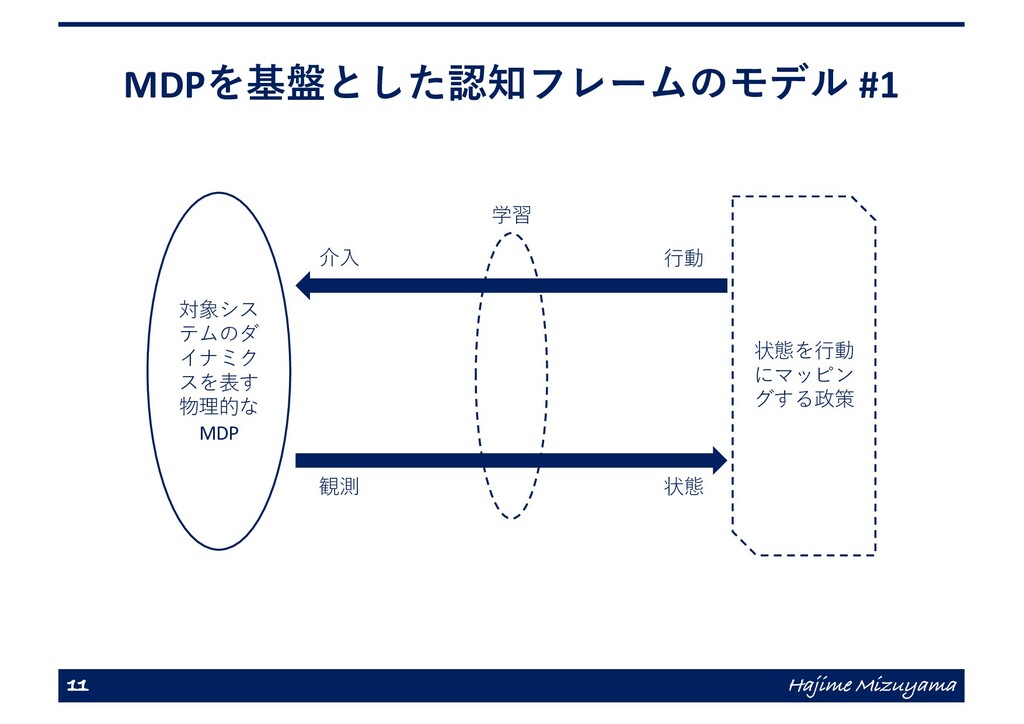
MDPを基盤とした認知フレームのモデル #1 11 Hajime Mizuyama 対象シス テムのダ イナミク スを表す 物理的な
MDP 状態を⾏動 にマッピン グする政策 学習 ⾏動 観測 状態 介⼊
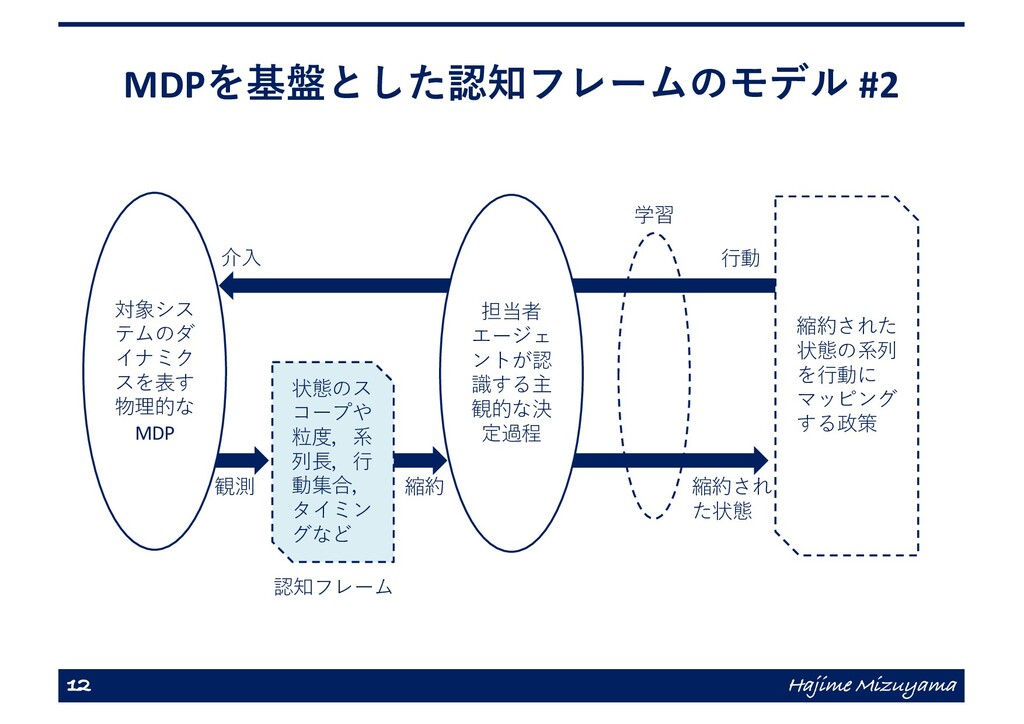
MDPを基盤とした認知フレームのモデル #2 12 Hajime Mizuyama 対象シス テムのダ イナミク スを表す 物理的な
MDP 担当者 エージェ ントが認 識する主 観的な決 定過程 状態のス コープや 粒度,系 列⻑,⾏ 動集合, タイミン グなど 縮約された 状態の系列 を⾏動に マッピング する政策 学習 ⾏動 認知フレーム 観測 縮約 縮約され た状態 介⼊
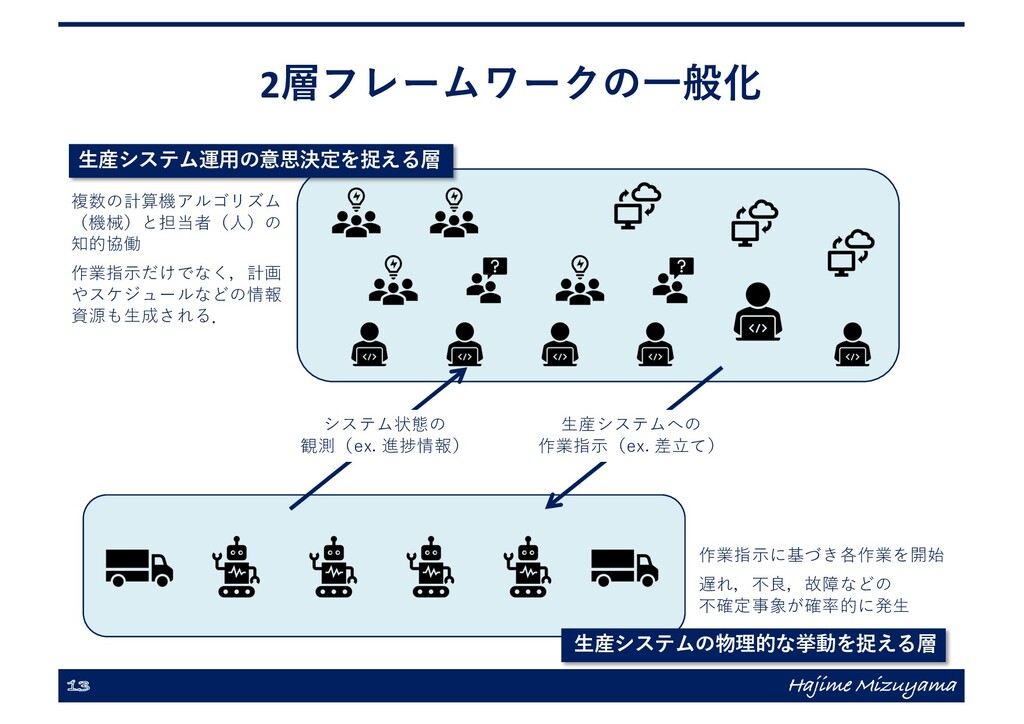
2層フレームワークの⼀般化 13 Hajime Mizuyama 作業指⽰に基づき各作業を開始 遅れ,不良,故障などの 不確定事象が確率的に発⽣ ⽣産システムへの 作業指⽰(ex. 差⽴て)
システム状態の 観測(ex. 進捗情報) 複数の計算機アルゴリズム (機械)と担当者(⼈)の 知的協働 作業指⽰だけでなく,計画 やスケジュールなどの情報 資源も⽣成される. ⽣産システム運⽤の意思決定を捉える層 ⽣産システムの物理的な挙動を捉える層
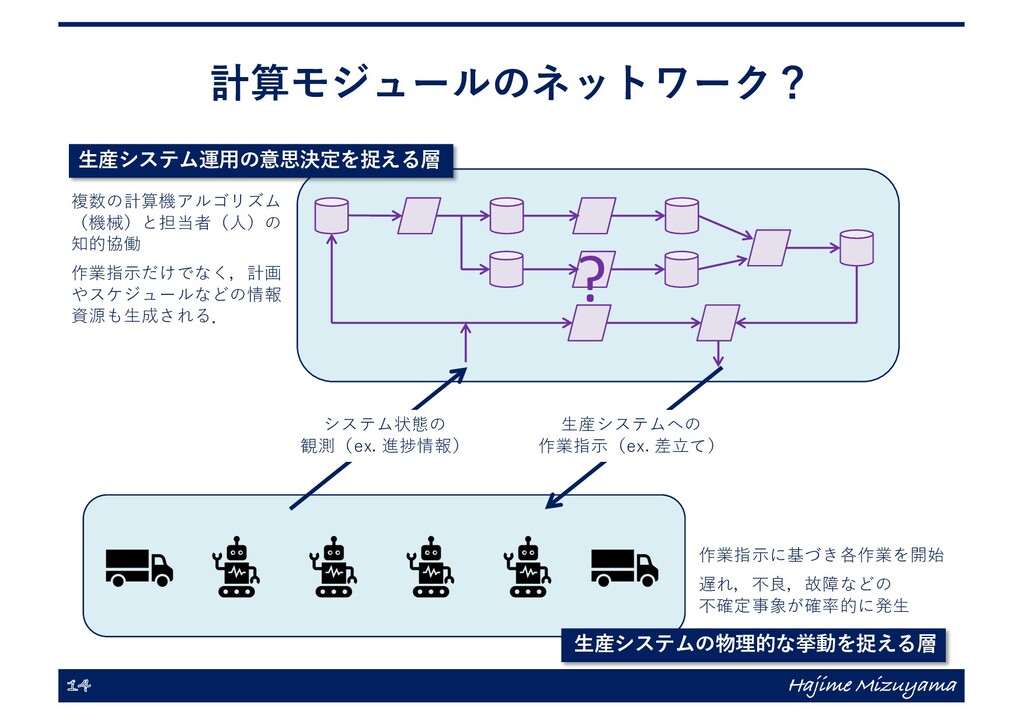
計算モジュールのネットワーク? 14 Hajime Mizuyama 作業指⽰に基づき各作業を開始 遅れ,不良,故障などの 不確定事象が確率的に発⽣ ⽣産システムへの 作業指⽰(ex. 差⽴て)
システム状態の 観測(ex. 進捗情報) 複数の計算機アルゴリズム (機械)と担当者(⼈)の 知的協働 作業指⽰だけでなく,計画 やスケジュールなどの情報 資源も⽣成される. ⽣産システム運⽤の意思決定を捉える層 ⽣産システムの物理的な挙動を捉える層 ?
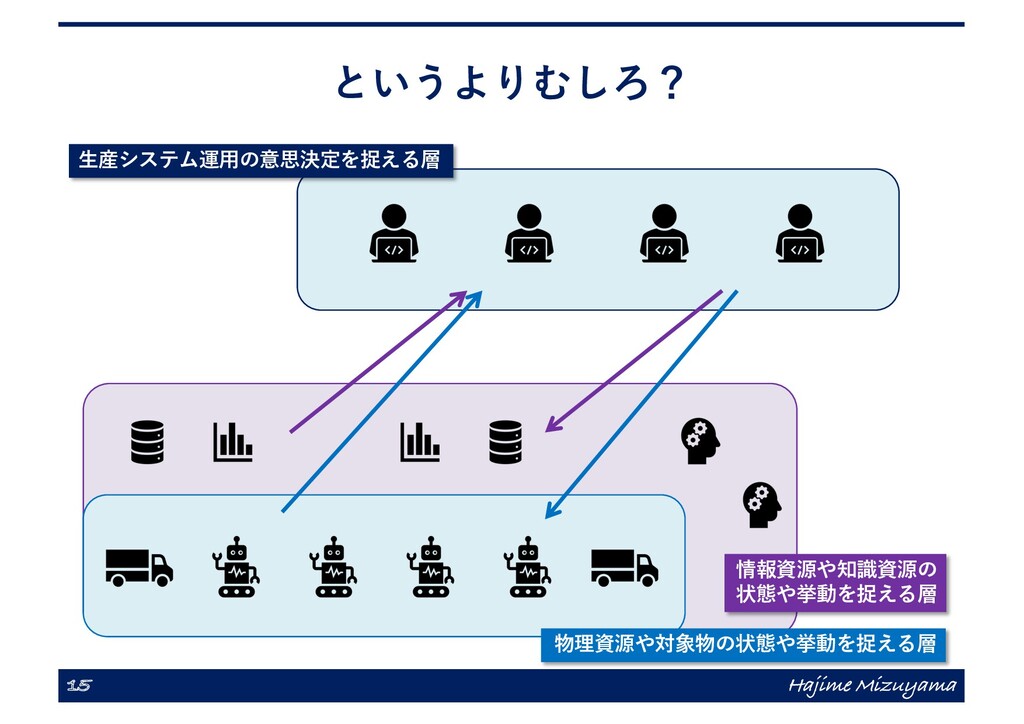
情報資源や知識資源の 状態や挙動を捉える層 というよりむしろ? 15 Hajime Mizuyama ⽣産システム運⽤の意思決定を捉える層 物理資源や対象物の状態や挙動を捉える層
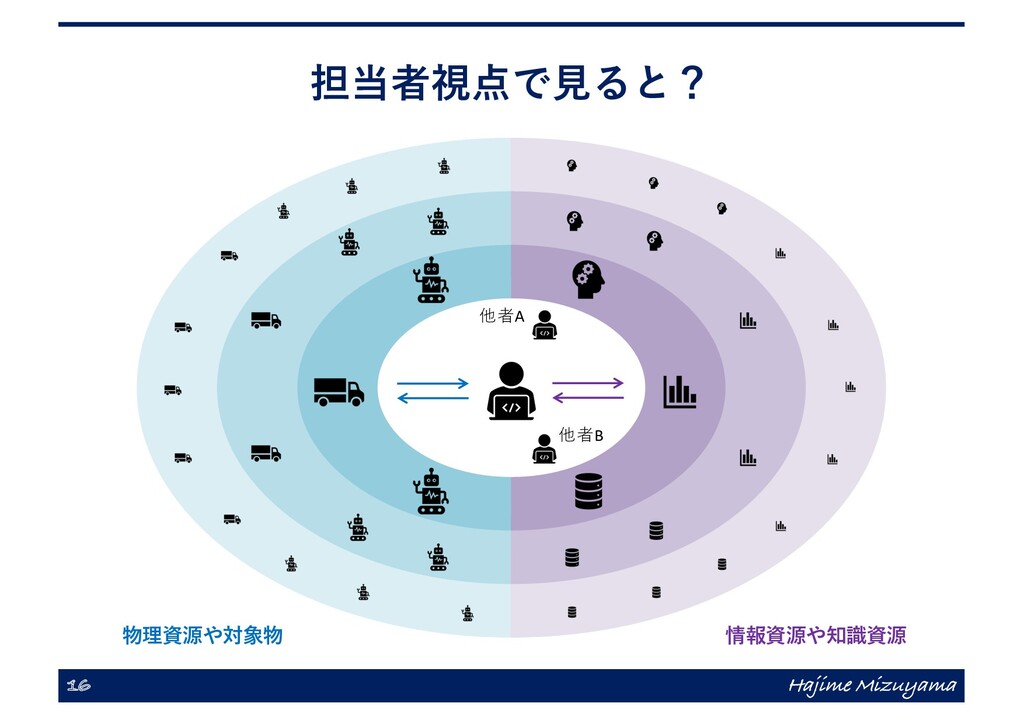
担当者視点で⾒ると? 16 Hajime Mizuyama 物理資源や対象物 情報資源や知識資源 他者A 他者B
時間発展モデルの⼀般化(内外反転) 17 観測 介⼊ 観測 介⼊
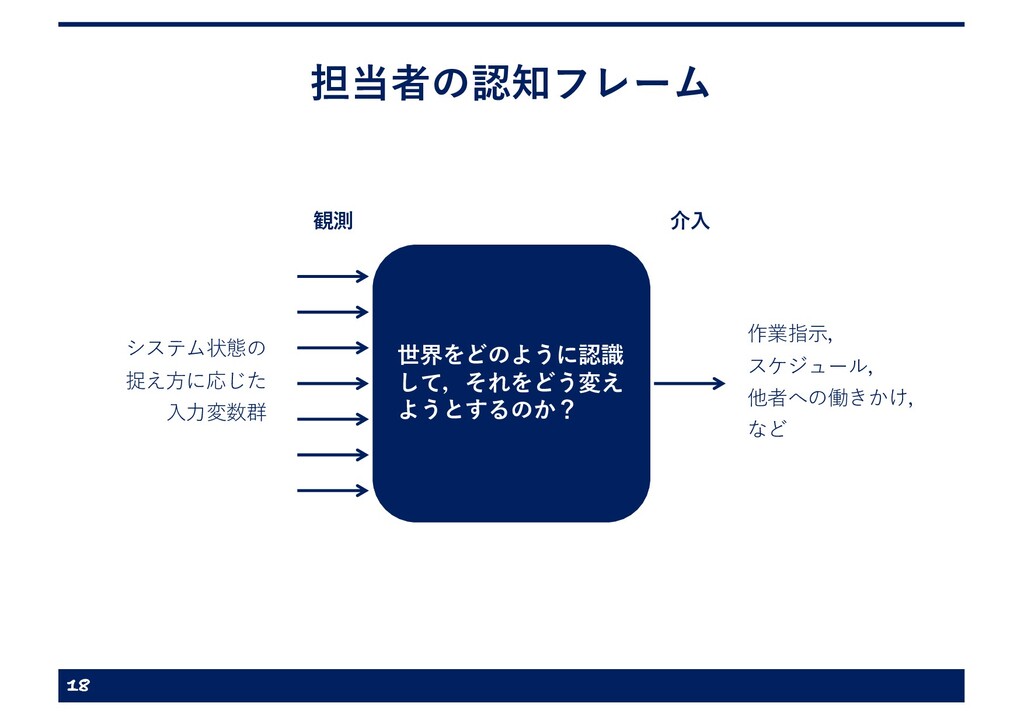
担当者の認知フレーム 18 世界をどのように認識 して,それをどう変え ようとするのか? 作業指⽰, スケジュール, 他者への働きかけ, など 観測
介⼊ システム状態の 捉え⽅に応じた ⼊⼒変数群
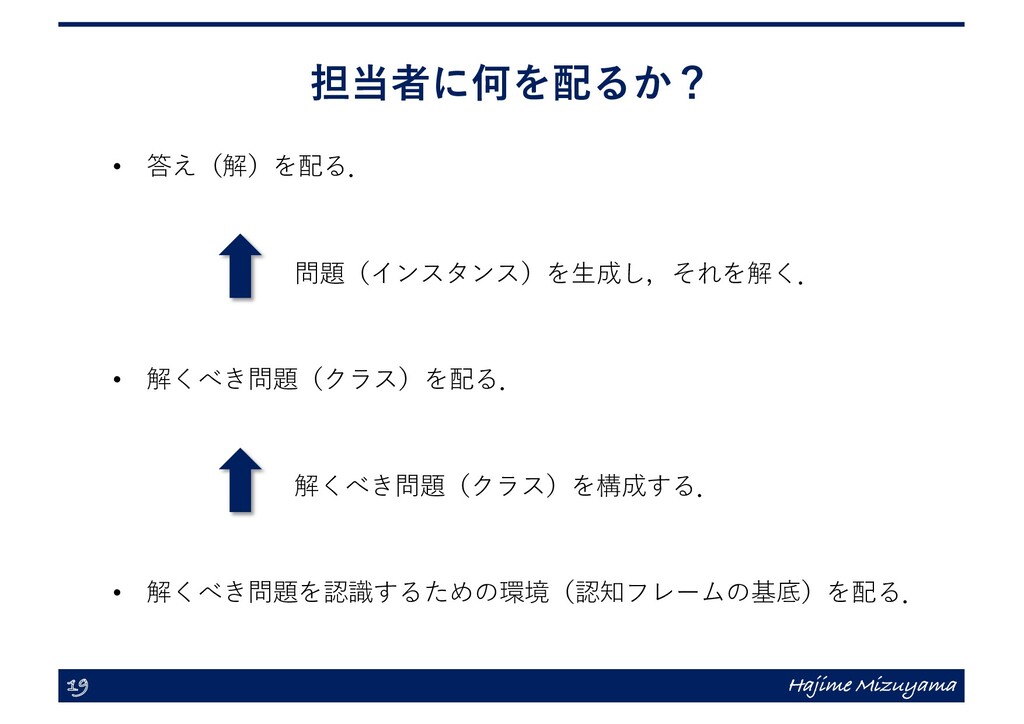
担当者に何を配るか? • 答え(解)を配る. 問題(インスタンス)を⽣成し,それを解く. • 解くべき問題(クラス)を配る. 解くべき問題(クラス)を構成する. • 解くべき問題を認識するための環境(認知フレームの基底)を配る. 19
Hajime Mizuyama
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 20 Hajime Mizuyama
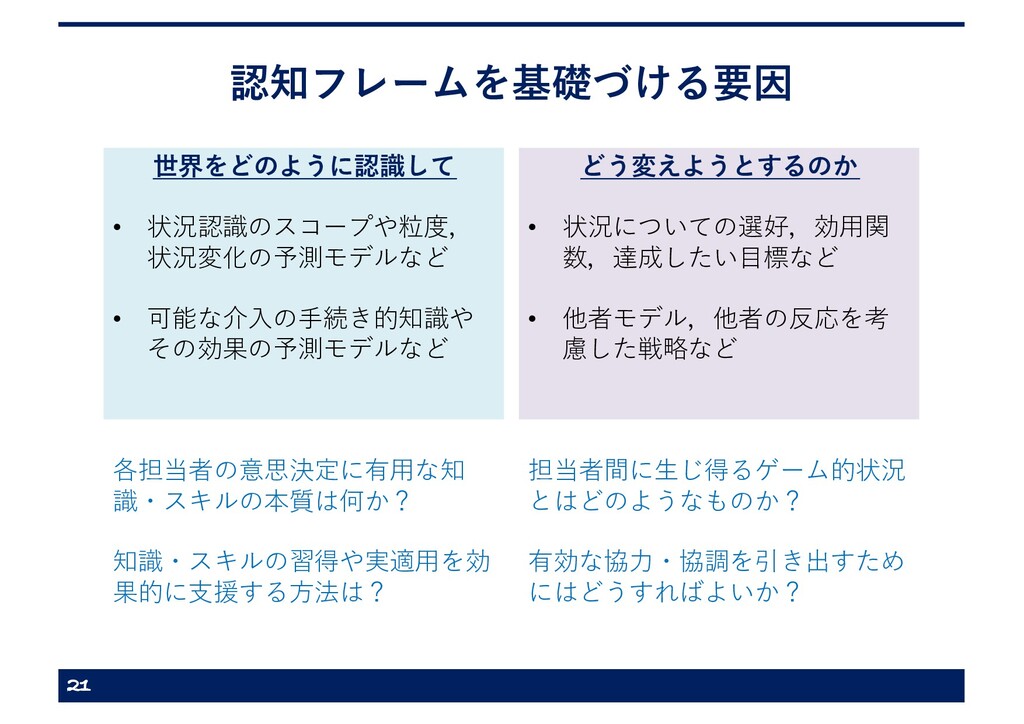
認知フレームを基礎づける要因 世界をどのように認識して • 状況認識のスコープや粒度, 状況変化の予測モデルなど • 可能な介⼊の⼿続き的知識や その効果の予測モデルなど 各担当者の意思決定に有⽤な知 識・スキルの本質は何か?
知識・スキルの習得や実適⽤を効 果的に⽀援する⽅法は? どう変えようとするのか • 状況についての選好,効⽤関 数,達成したい⽬標など • 他者モデル,他者の反応を考 慮した戦略など 担当者間に⽣じ得るゲーム的状況 とはどのようなものか? 有効な協⼒・協調を引き出すため にはどうすればよいか? 21
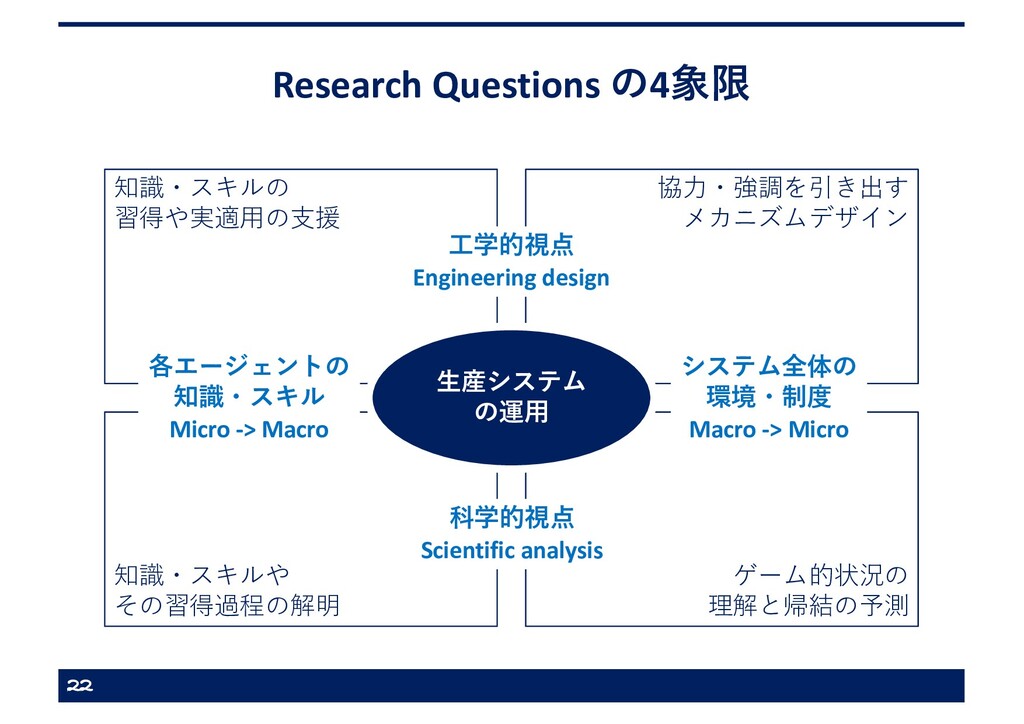
Research Questions の4象限 22 知識・スキルの 習得や実適⽤の⽀援 協⼒・強調を引き出す メカニズムデザイン 知識・スキルや その習得過程の解明
ゲーム的状況の 理解と帰結の予測 ⽣産システム の運⽤ 科学的視点 Scientific analysis ⼯学的視点 Engineering design 各エージェントの 知識・スキル Micro -> Macro システム全体の 環境・制度 Macro -> Micro
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 23 Hajime Mizuyama
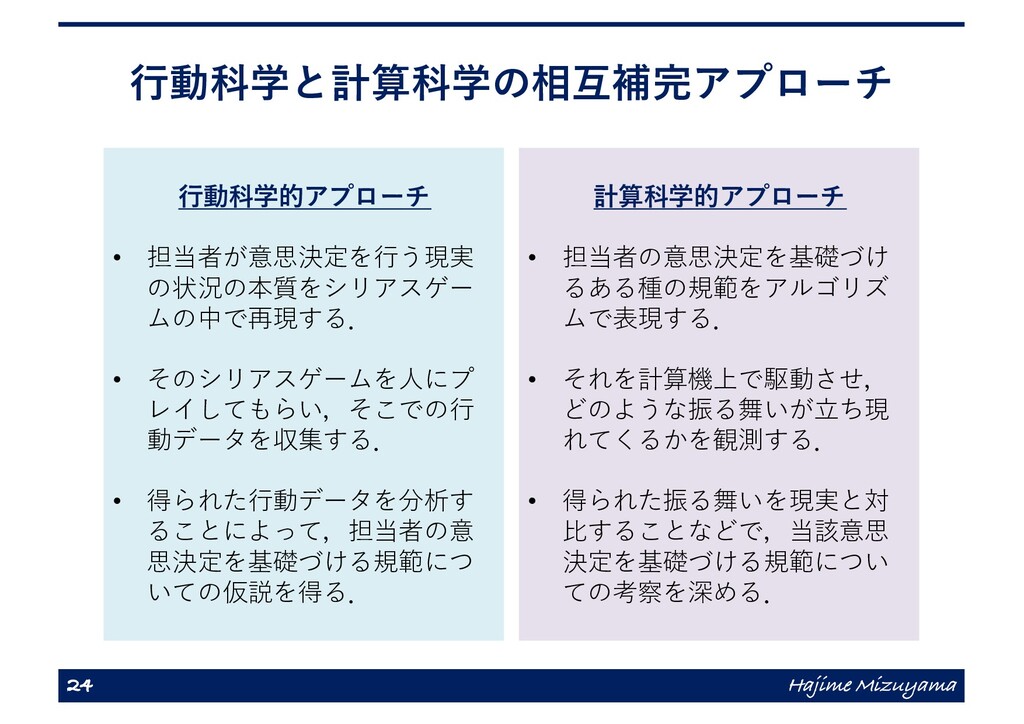
⾏動科学と計算科学の相互補完アプローチ ⾏動科学的アプローチ • 担当者が意思決定を⾏う現実 の状況の本質をシリアスゲー ムの中で再現する. • そのシリアスゲームを⼈にプ レイしてもらい,そこでの⾏ 動データを収集する.
• 得られた⾏動データを分析す ることによって,担当者の意 思決定を基礎づける規範につ いての仮説を得る. 計算科学的アプローチ • 担当者の意思決定を基礎づけ るある種の規範をアルゴリズ ムで表現する. • それを計算機上で駆動させ, どのような振る舞いが⽴ち現 れてくるかを観測する. • 得られた振る舞いを現実と対 ⽐することなどで,当該意思 決定を基礎づける規範につい ての考察を深める. 24 Hajime Mizuyama
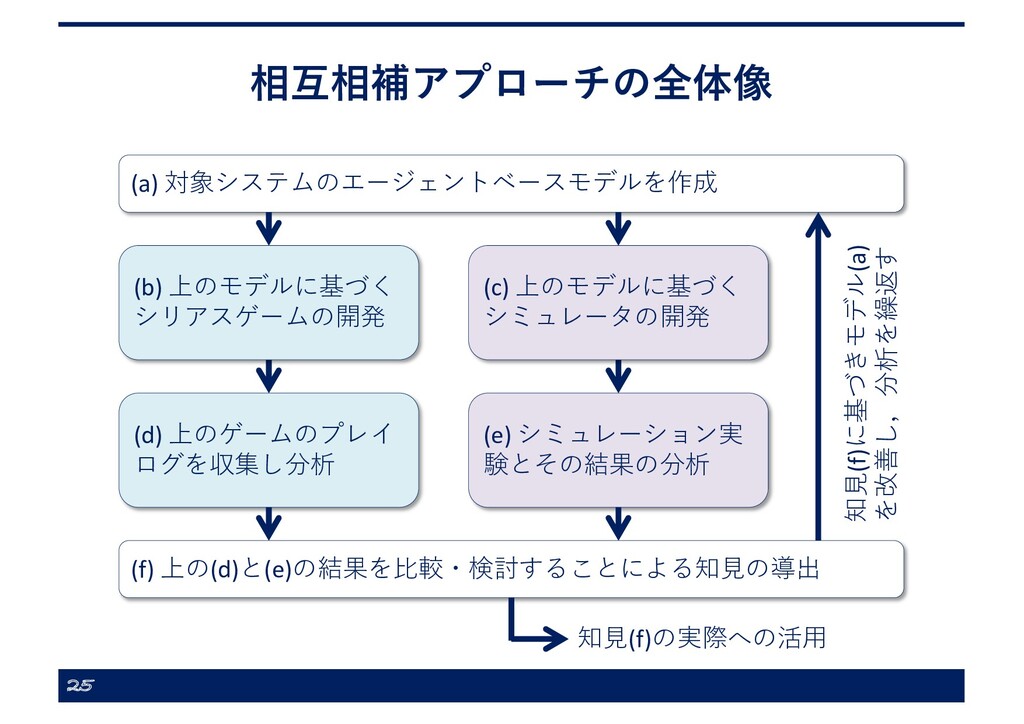
相互相補アプローチの全体像 25 (a) 対象システムのエージェントベースモデルを作成 (d) 上のゲームのプレイ ログを収集し分析 (e) シミュレーション実 験とその結果の分析
(f) 上の(d)と(e)の結果を⽐較・検討することによる知⾒の導出 (b) 上のモデルに基づく シリアスゲームの開発 (c) 上のモデルに基づく シミュレータの開発 知⾒(f)に基づきモデル(a) を改善し,分析を繰返す 知⾒(f)の実際への活⽤
相補的活⽤の例 ⾏動科学的アプローチ シリアスゲームにおけるプレイヤ の⾏動のデータ化と分析 計算科学的アプローチ 計算機でのシミュレーション実験 の実施とその結果の分析 26 数理的な仮説 被験者実験
予想通りの/予想 に反する結果 計算機実験
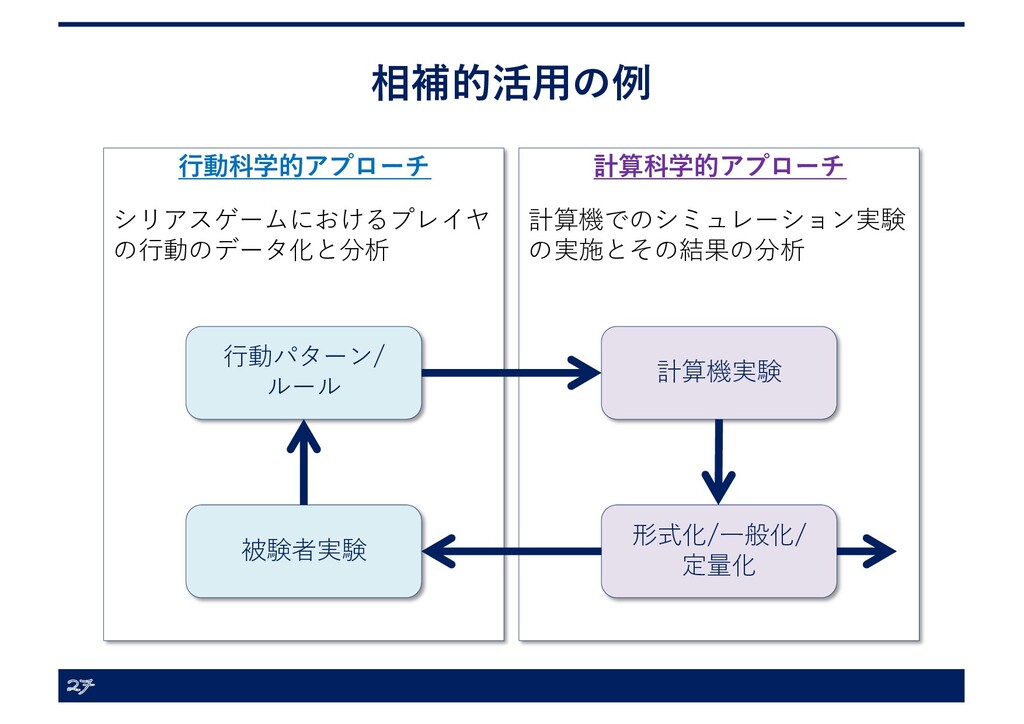
相補的活⽤の例 ⾏動科学的アプローチ シリアスゲームにおけるプレイヤ の⾏動のデータ化と分析 計算科学的アプローチ 計算機でのシミュレーション実験 の実施とその結果の分析 27 被験者実験 ⾏動パターン/
ルール 計算機実験 形式化/⼀般化/ 定量化
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 28 Hajime Mizuyama
試⾏錯誤中の主な研究事例 • 製鉄所の加熱炉前スラブヤード • 製鉄企業の社内サプライチェーン(ColPMan) • 飲⾷店の座席案内とフロアタスク(受注,配膳,下膳など) • ⾃動倉庫とRGV(Rail Guided
Vehicle) • ⾷品サプライチェーン(1/3ルールと⾷品廃棄) • スケジューリングオークション 29 Hajime Mizuyama
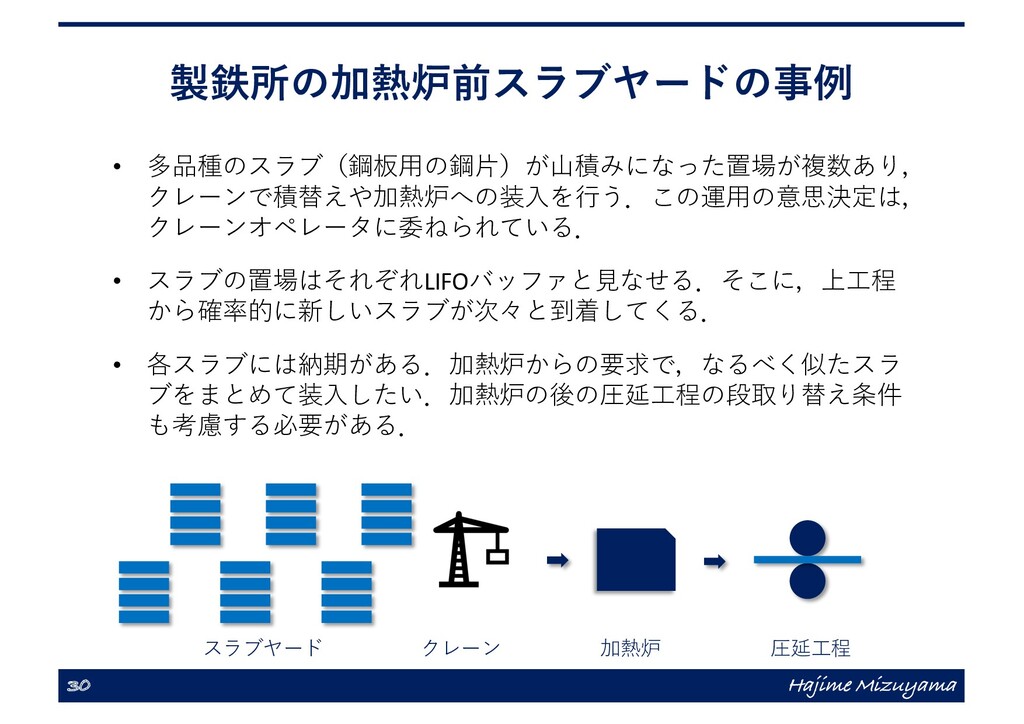
製鉄所の加熱炉前スラブヤードの事例 • 多品種のスラブ(鋼板⽤の鋼⽚)が⼭積みになった置場が複数あり, クレーンで積替えや加熱炉への装⼊を⾏う.この運⽤の意思決定は, クレーンオペレータに委ねられている. • スラブの置場はそれぞれLIFOバッファと⾒なせる.そこに,上⼯程 から確率的に新しいスラブが次々と到着してくる. • 各スラブには納期がある.加熱炉からの要求で,なるべく似たスラ
ブをまとめて装⼊したい.加熱炉の後の圧延⼯程の段取り替え条件 も考慮する必要がある. 30 Hajime Mizuyama 加熱炉 圧延⼯程 クレーン スラブヤード
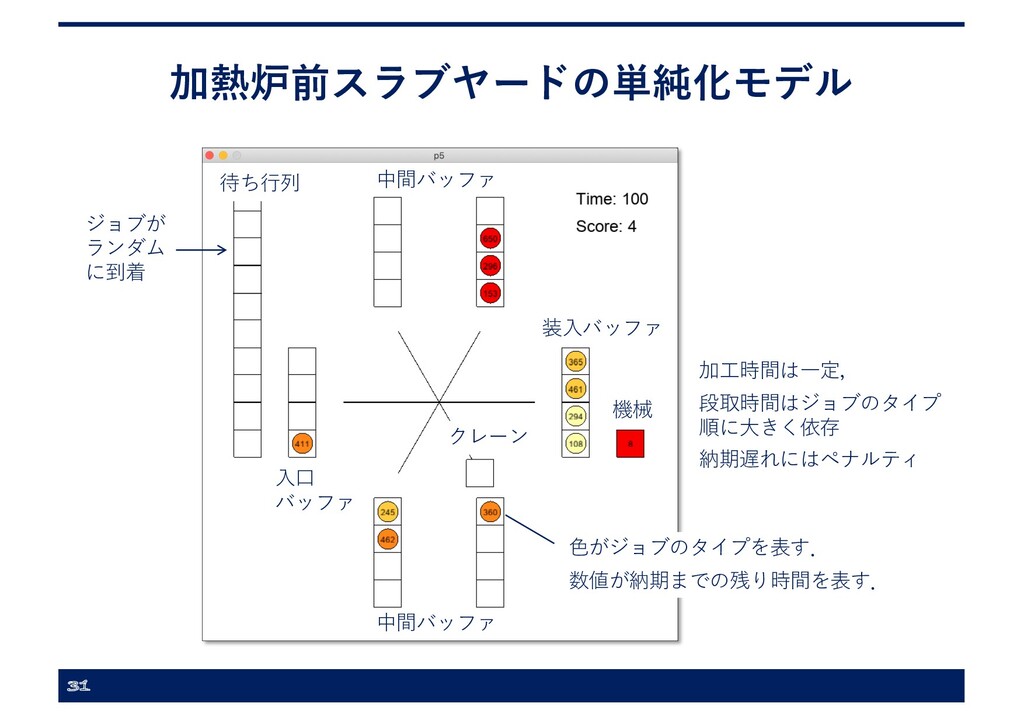
加熱炉前スラブヤードの単純化モデル 31 機械 装⼊バッファ クレーン 中間バッファ 中間バッファ ⼊⼝ バッファ 待ち⾏列
⾊がジョブのタイプを表す. 数値が納期までの残り時間を表す. ジョブが ランダム に到着 加⼯時間は⼀定, 段取時間はジョブのタイプ 順に⼤きく依存 納期遅れにはペナルティ
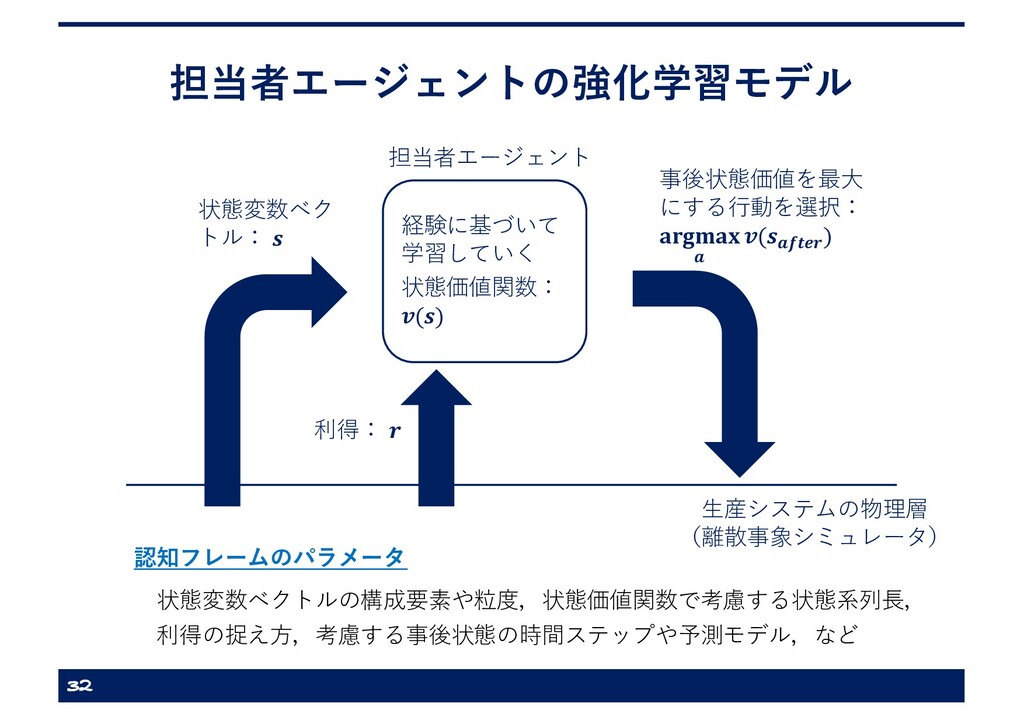
担当者エージェントの強化学習モデル 32 ⽣産システムの物理層 (離散事象シミュレータ) 経験に基づいて 学習していく 状態価値関数: () 担当者エージェント 利得:
状態変数ベク トル: 事後状態価値を最⼤ にする⾏動を選択: ( ) 認知フレームのパラメータ 状態変数ベクトルの構成要素や粒度,状態価値関数で考慮する状態系列⻑, 利得の捉え⽅,考慮する事後状態の時間ステップや予測モデル,など
学習の効果の⼀例:before #1 33 Hajime Mizuyama
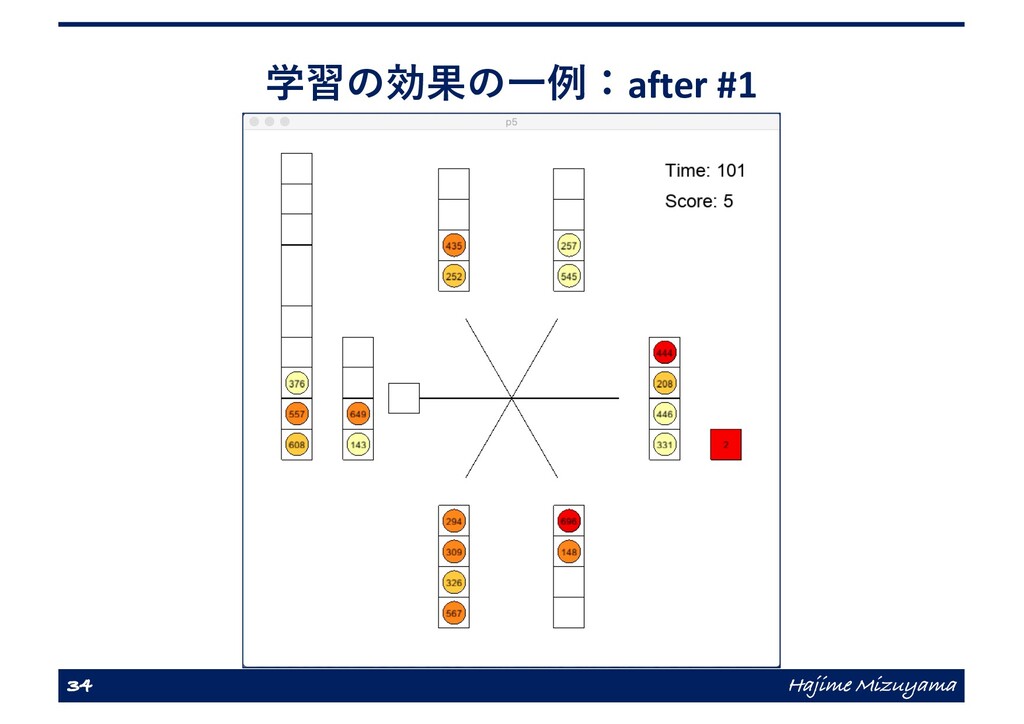
学習の効果の⼀例:after #1 34 Hajime Mizuyama
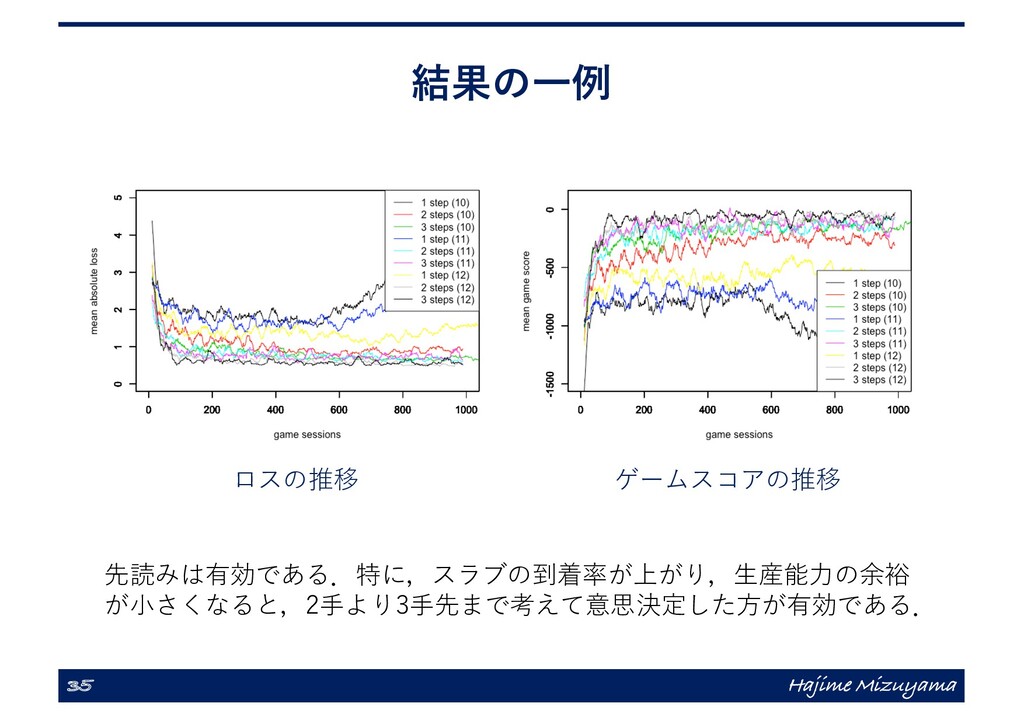
結果の⼀例 35 Hajime Mizuyama ロスの推移 ゲームスコアの推移 先読みは有効である.特に,スラブの到着率が上がり,⽣産能⼒の余裕 が⼩さくなると,2⼿より3⼿先まで考えて意思決定した⽅が有効である.
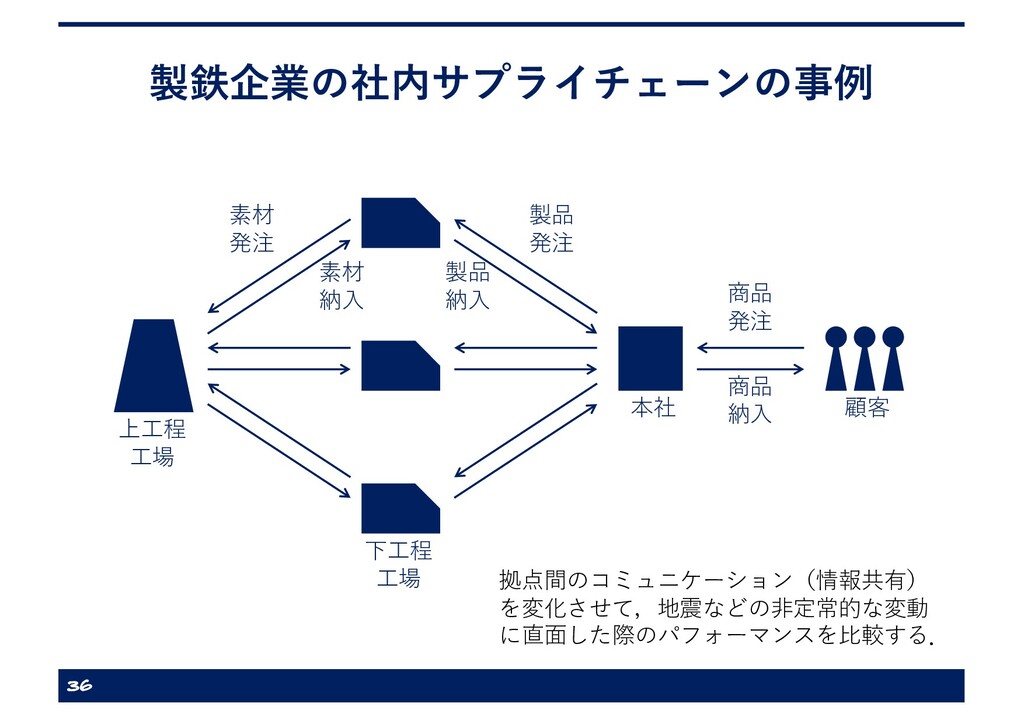
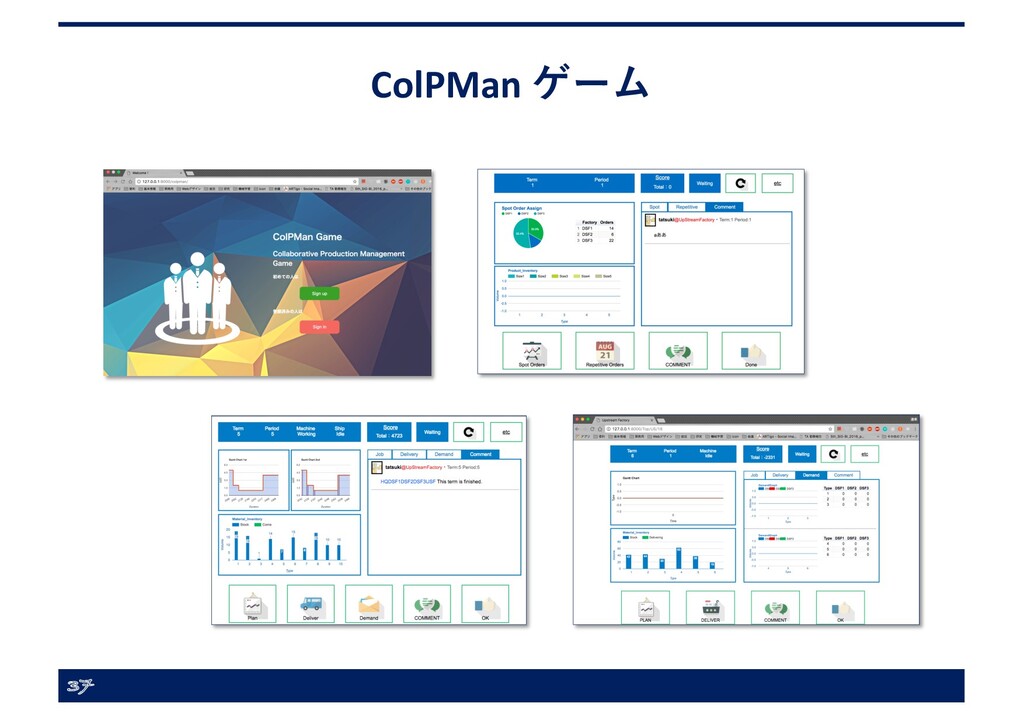
36 本社 顧客 下⼯程 ⼯場 上⼯程 ⼯場 素材 発注 素材
納⼊ 製品 発注 製品 納⼊ 商品 発注 商品 納⼊ 拠点間のコミュニケーション(情報共有) を変化させて,地震などの⾮定常的な変動 に直⾯した際のパフォーマンスを⽐較する. 製鉄企業の社内サプライチェーンの事例
ColPMan ゲーム 37
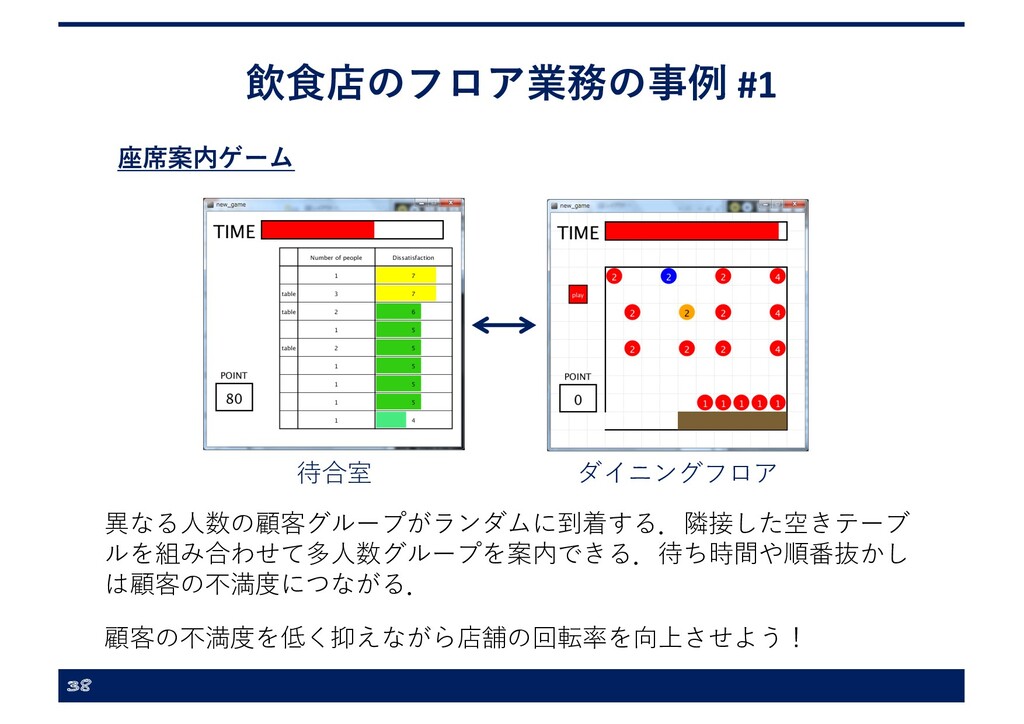
飲⾷店のフロア業務の事例 #1 38 待合室 ダイニングフロア 異なる⼈数の顧客グループがランダムに到着する.隣接した空きテーブ ルを組み合わせて多⼈数グループを案内できる.待ち時間や順番抜かし は顧客の不満度につながる. 顧客の不満度を低く抑えながら店舗の回転率を向上させよう! 座席案内ゲーム
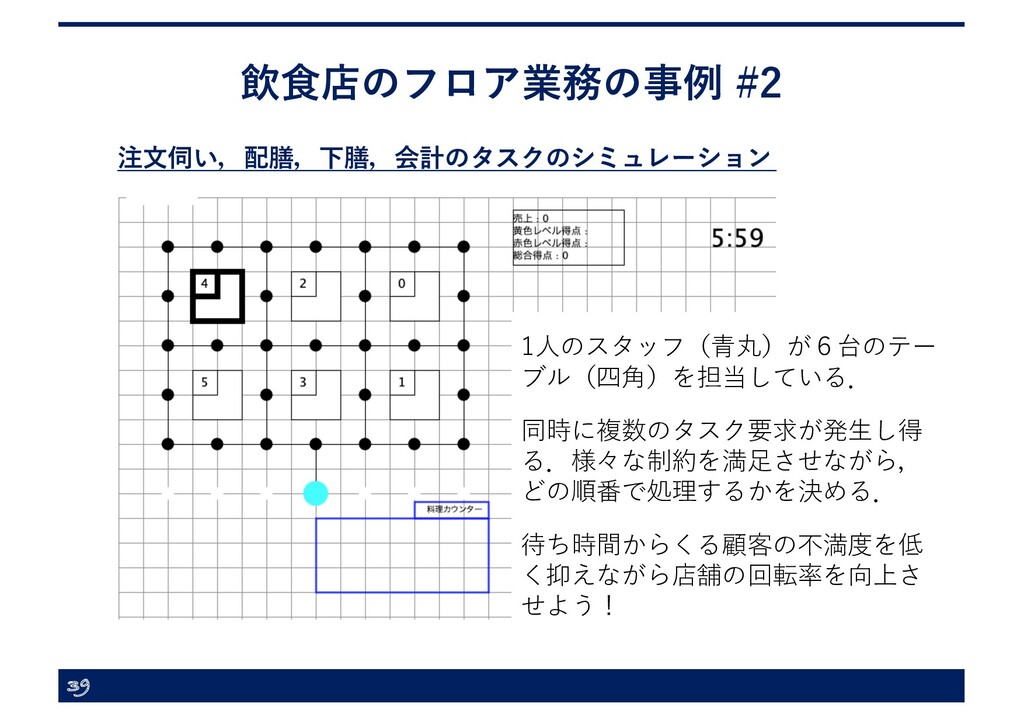
飲⾷店のフロア業務の事例 #2 39 1⼈のスタッフ(⻘丸)が6台のテー ブル(四⾓)を担当している. 同時に複数のタスク要求が発⽣し得 る.様々な制約を満⾜させながら, どの順番で処理するかを決める. 待ち時間からくる顧客の不満度を低 く抑えながら店舗の回転率を向上さ
せよう! 注⽂伺い,配膳,下膳,会計のタスクのシミュレーション
⽬次 • どういうシステムを • どのように概念化することで • どのような疑問や課題が浮かび上がってきて • それらにどのようにアプローチしようとしているのか •
の試⾏錯誤(研究事例) • まとめ 40 Hajime Mizuyama
まとめ • (広義の)⽣産システムの運⽤は,⼈と機械(計算機)の知的協働 によってなされていると考えることができる. • 今後さらに進んでいくデジタル化・スマート化の流れを受けて,こ の知的協働のフレームワークはいやおうなしに変化していくだろう. • Industry 4.0
時代の新しい知的協働のあるべき姿を追求していくため に,まずこの協働のメカニズムについての理解を深めていきたい. • 今回は,そのためのモデル化の試みとアプローチの概要を提⽰した 上で,具体的な研究事例を少し紹介した. 41 Hajime Mizuyama
42
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}