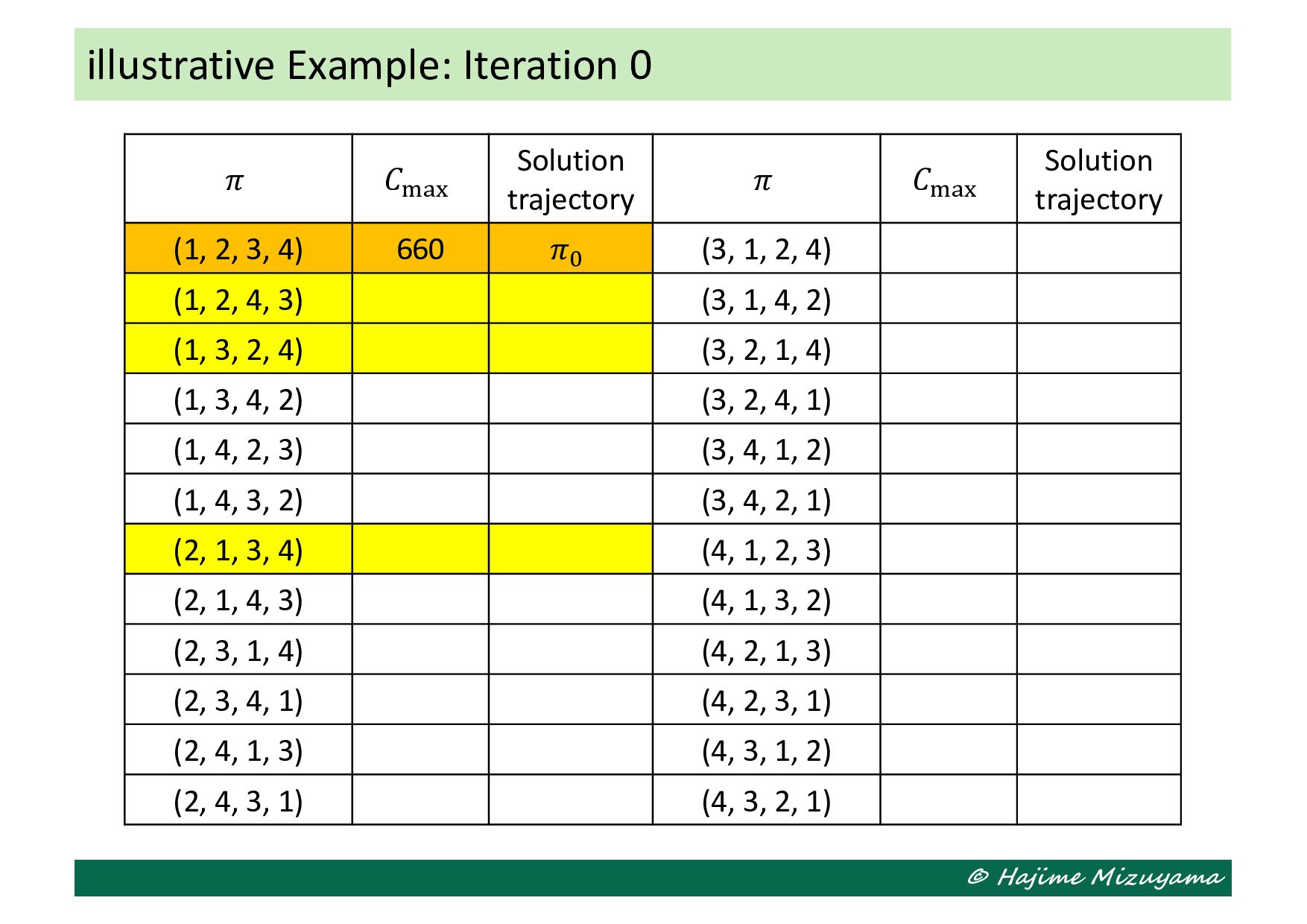
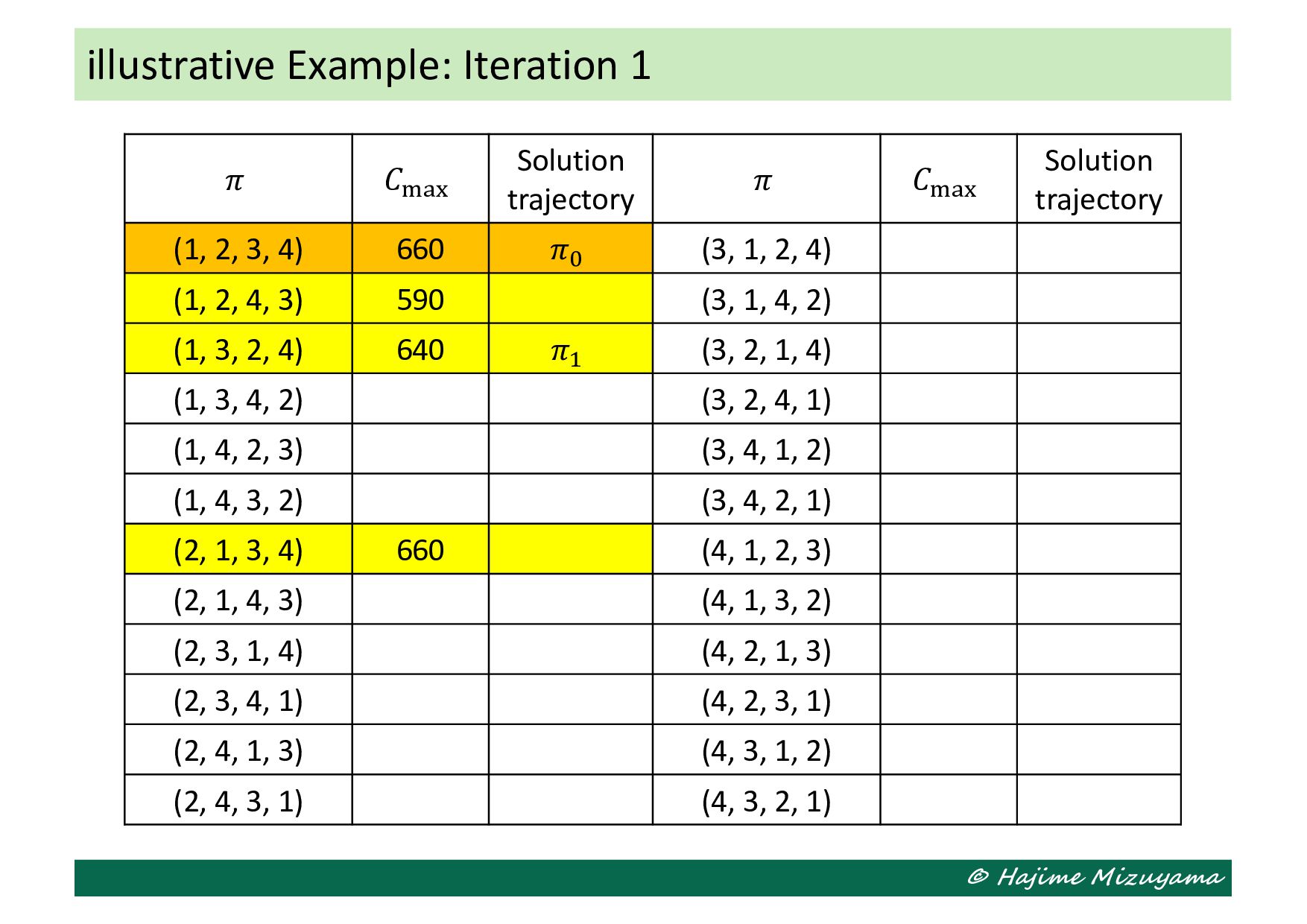
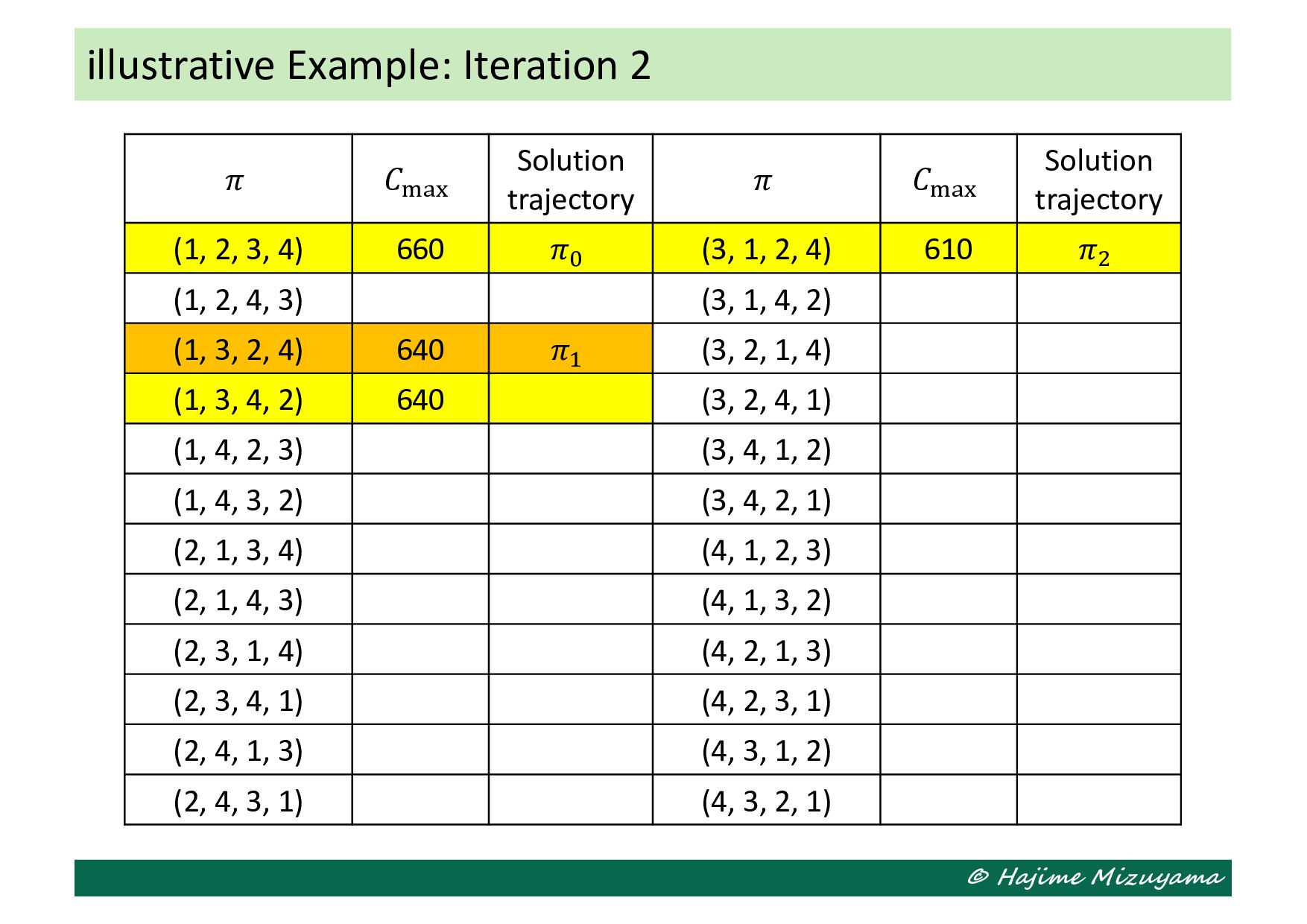
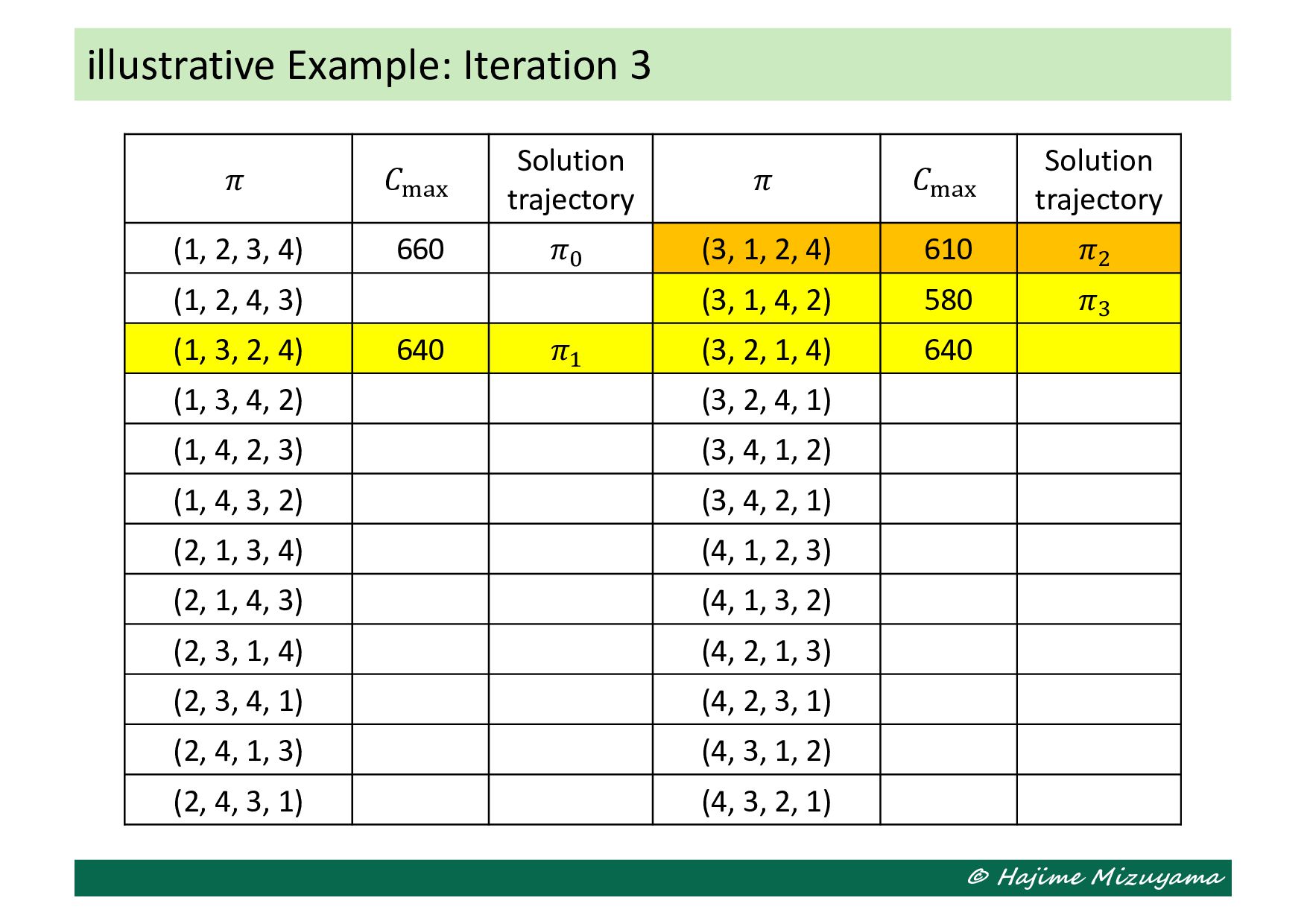
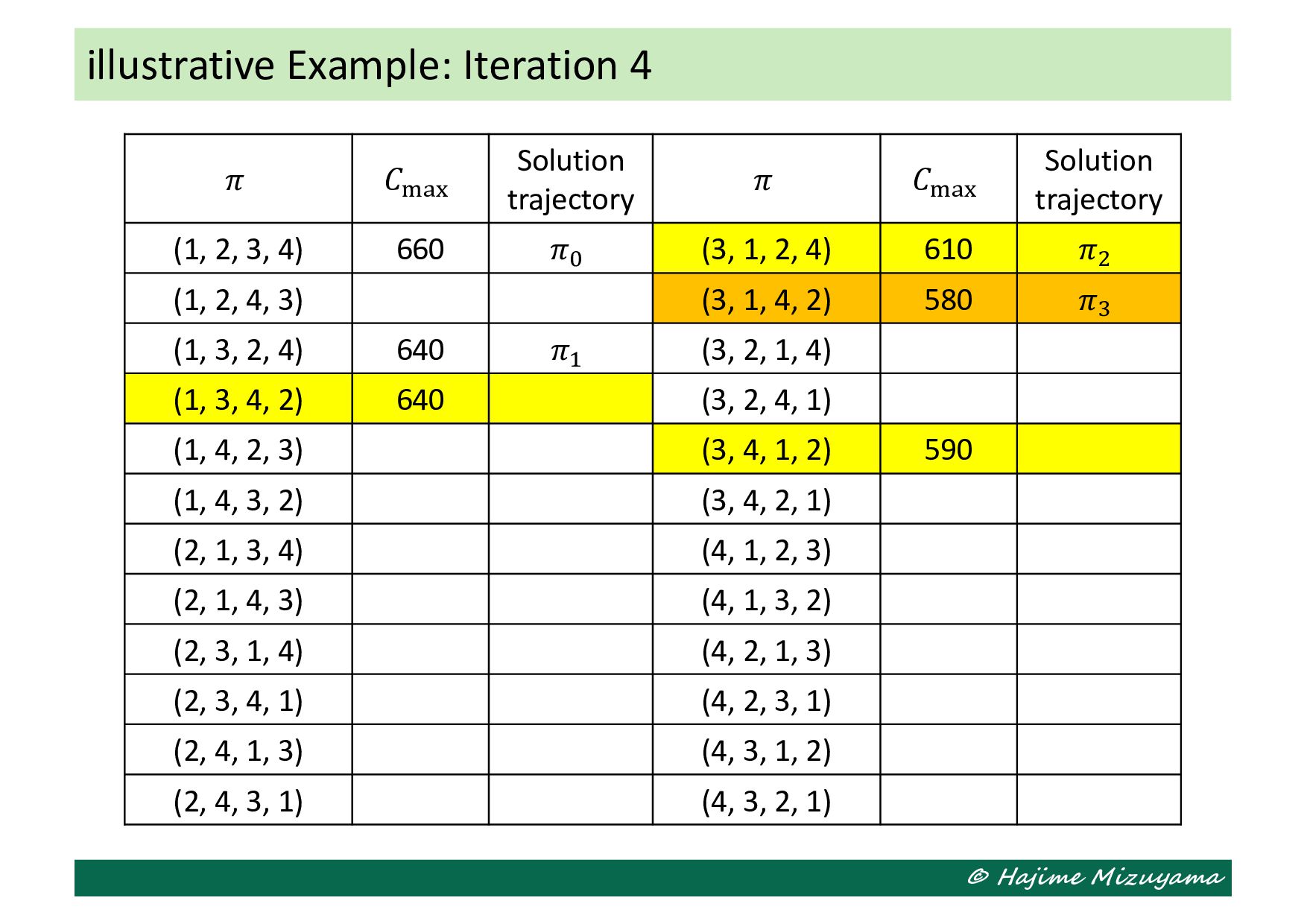
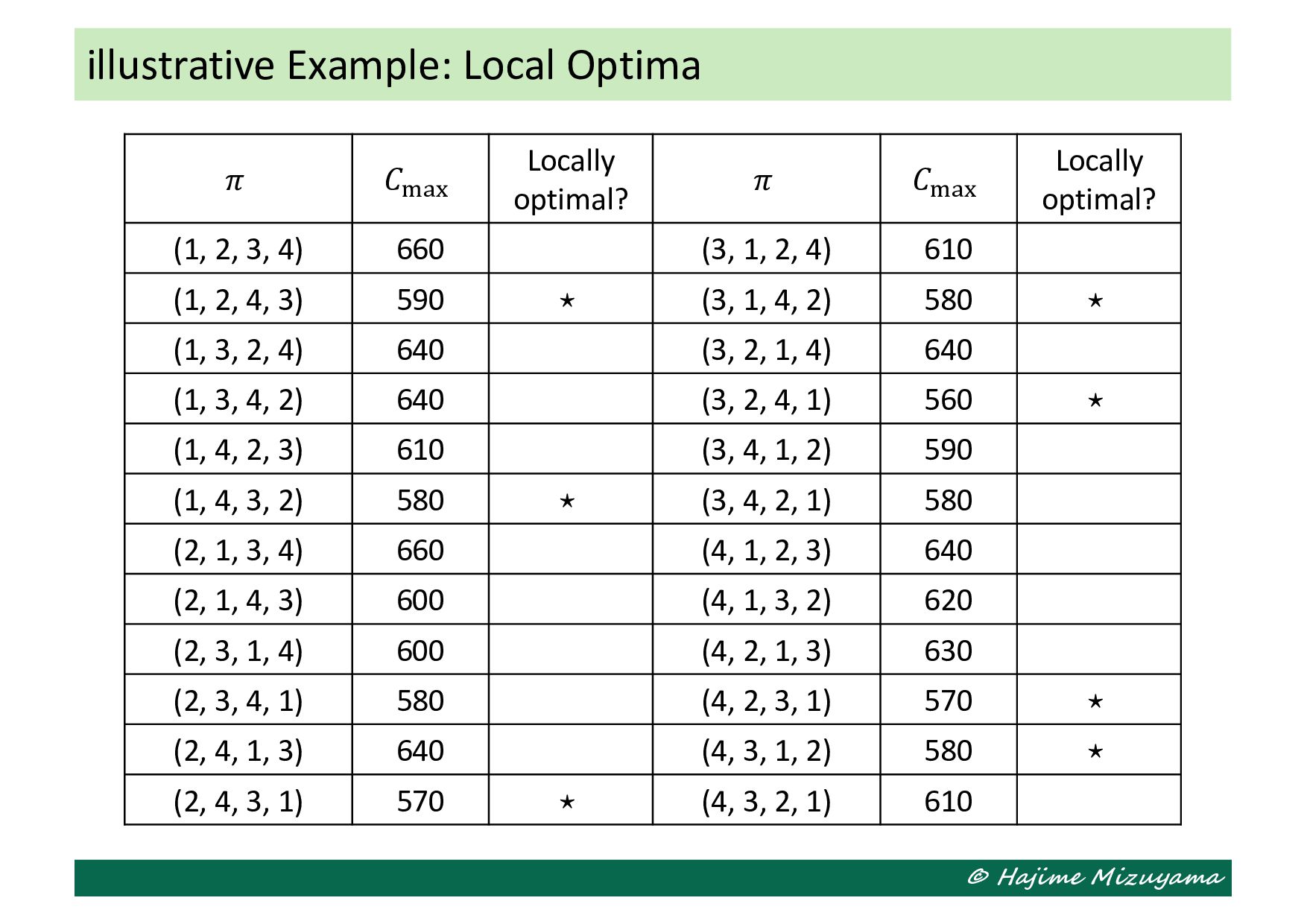
optimal? (1, 2, 3, 4) 660 (3, 1, 2, 4) 610 (1, 2, 4, 3) 590 ⋆ (3, 1, 4, 2) 580 ⋆ (1, 3, 2, 4) 640 (3, 2, 1, 4) 640 (1, 3, 4, 2) 640 (3, 2, 4, 1) 560 ⋆ (1, 4, 2, 3) 610 (3, 4, 1, 2) 590 (1, 4, 3, 2) 580 ⋆ (3, 4, 2, 1) 580 (2, 1, 3, 4) 660 (4, 1, 2, 3) 640 (2, 1, 4, 3) 600 (4, 1, 3, 2) 620 (2, 3, 1, 4) 600 (4, 2, 1, 3) 630 (2, 3, 4, 1) 580 (4, 2, 3, 1) 570 ⋆ (2, 4, 1, 3) 640 (4, 3, 1, 2) 580 ⋆ (2, 4, 3, 1) 570 ⋆ (4, 3, 2, 1) 610 illustrative Example: Local Optima
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}