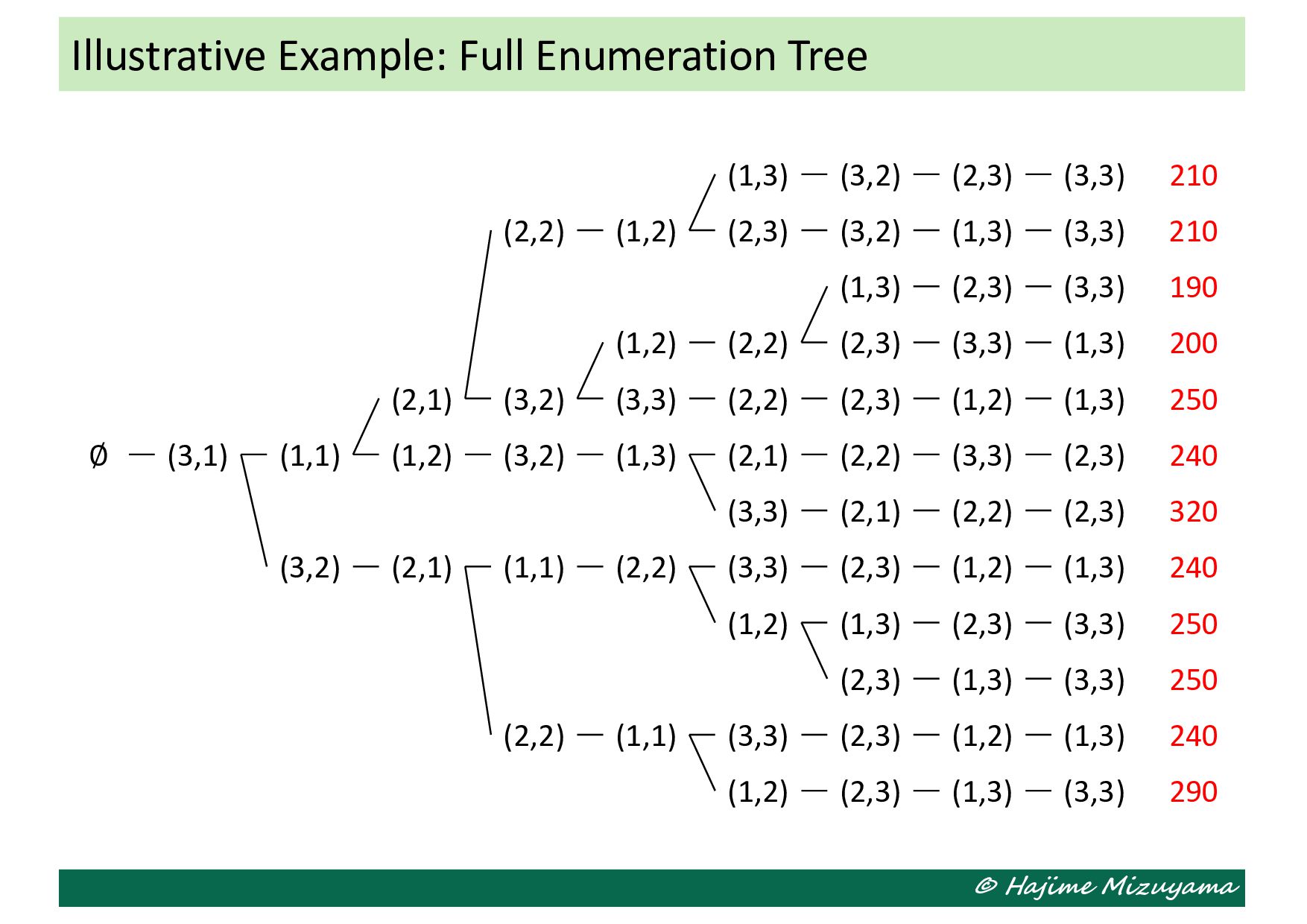
(1,1) (3,2) (2,1) (2,1) (1,2) (2,2) (3,2) (3,2) (1,1) (2,2) (1,2) (1,3) (3,2) (2,3) (3,3) 210 (2,3) (3,2) (3,3) (1,3) 210 (1,2) (3,3) (2,2) (2,2) (1,3) (2,3) (2,3) (2,3) (3,3) (1,2) (3,3) (1,3) (1,3) 190 200 250 (1,3) (2,1) (3,3) (2,2) (2,1) (3,3) (2,2) (2,3) (2,3) 240 320 (2,2) (1,1) (3,3) (3,3) (1,3) (2,3) (2,3) (2,3) (1,2) (1,2) (1,3) (1,3) (2,3) (1,3) (1,3) (3,3) (1,2) (3,3) (3,3) (1,2) (2,3) 240 250 250 240 290
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}