講義に入る前に 確認事項
前回までの復習
前回
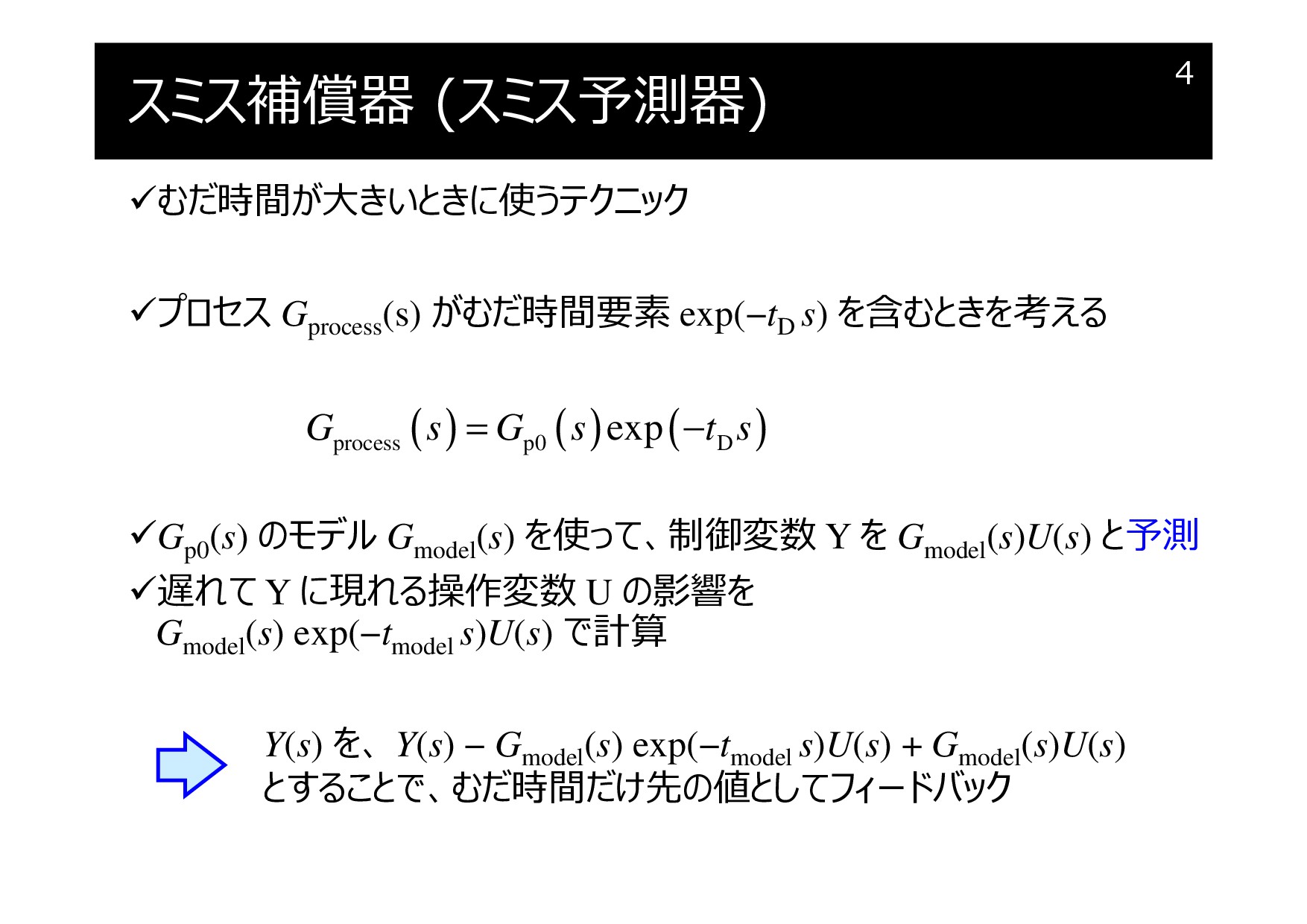
スミス補償器 (スミス予測器)
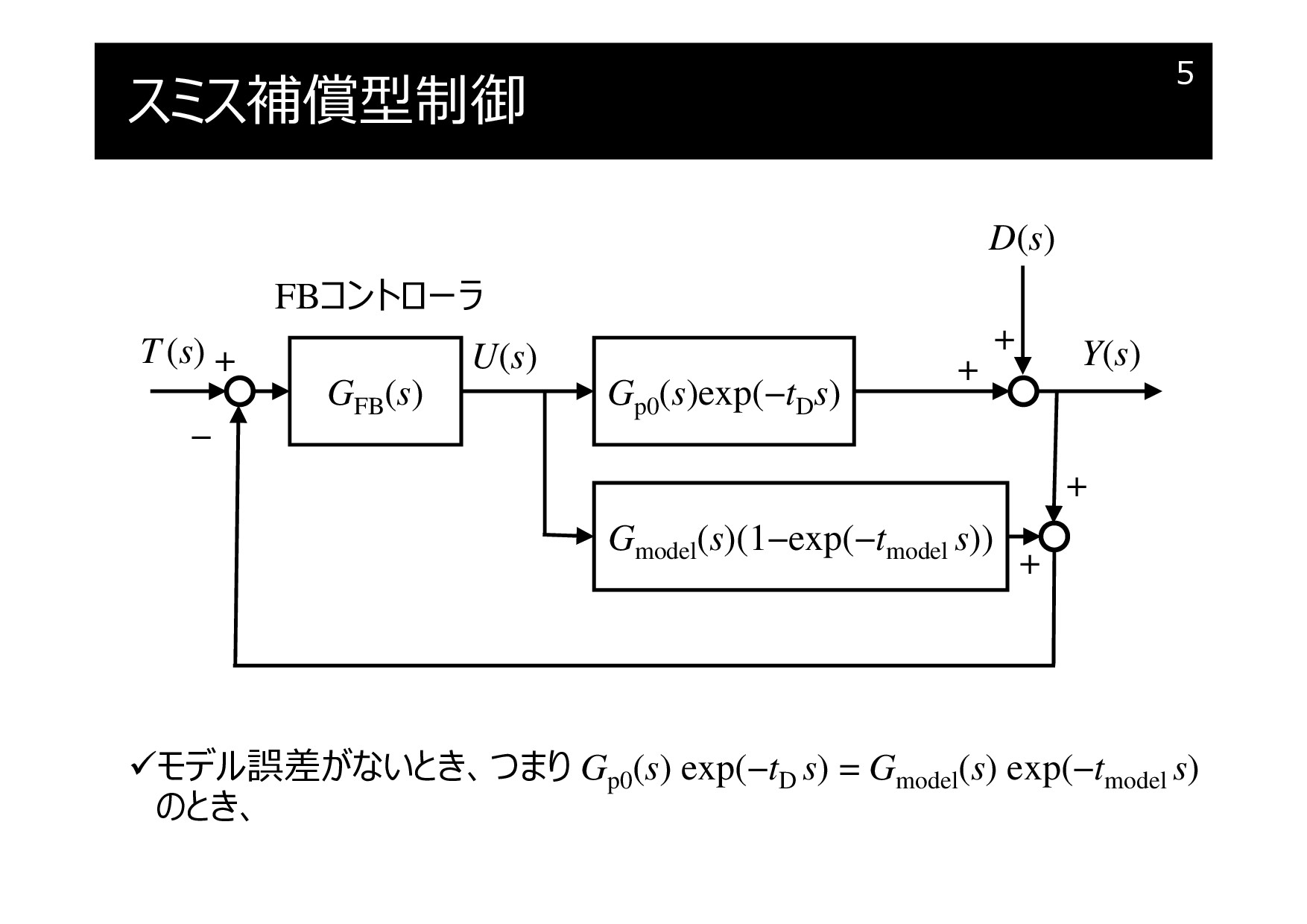
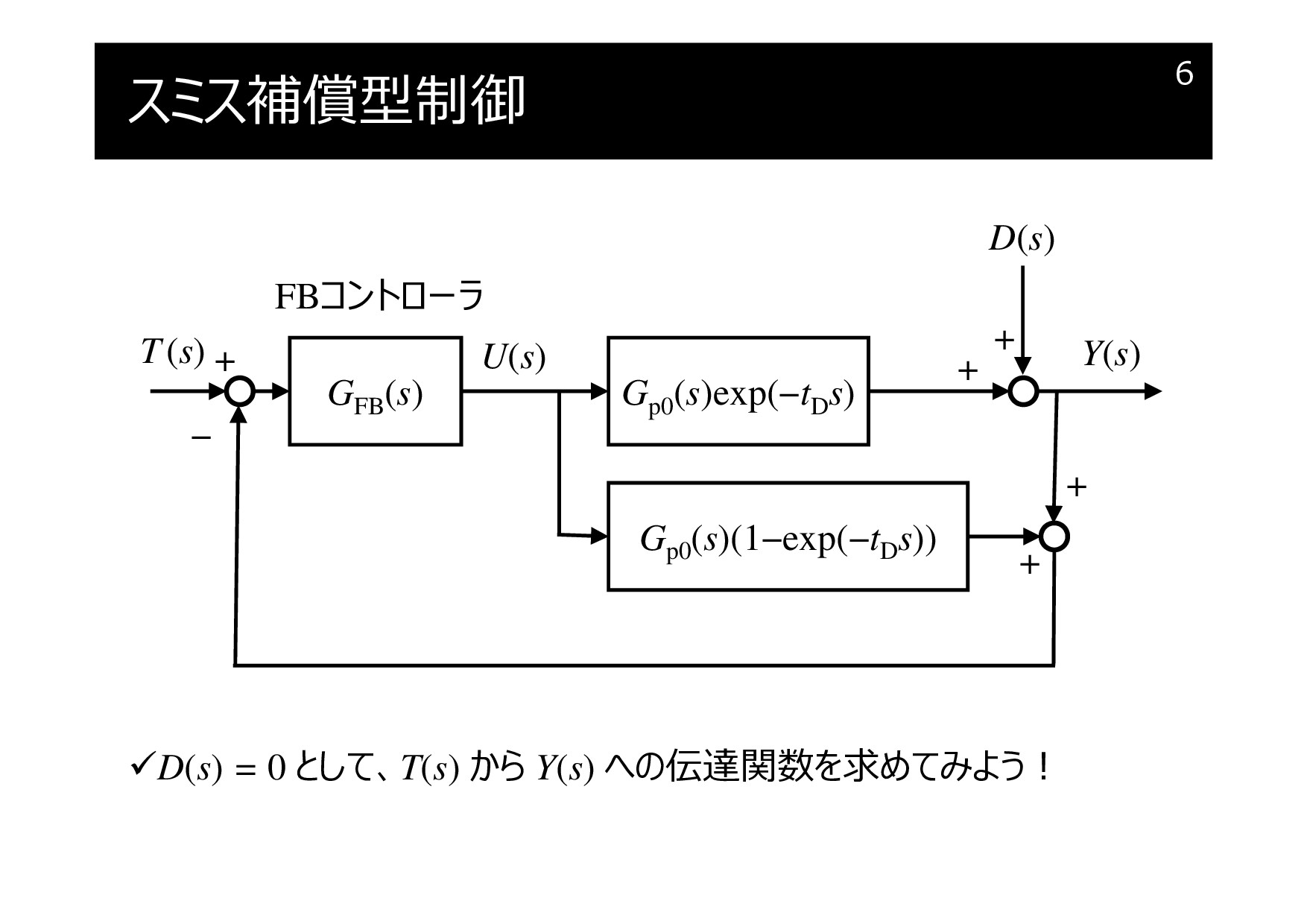
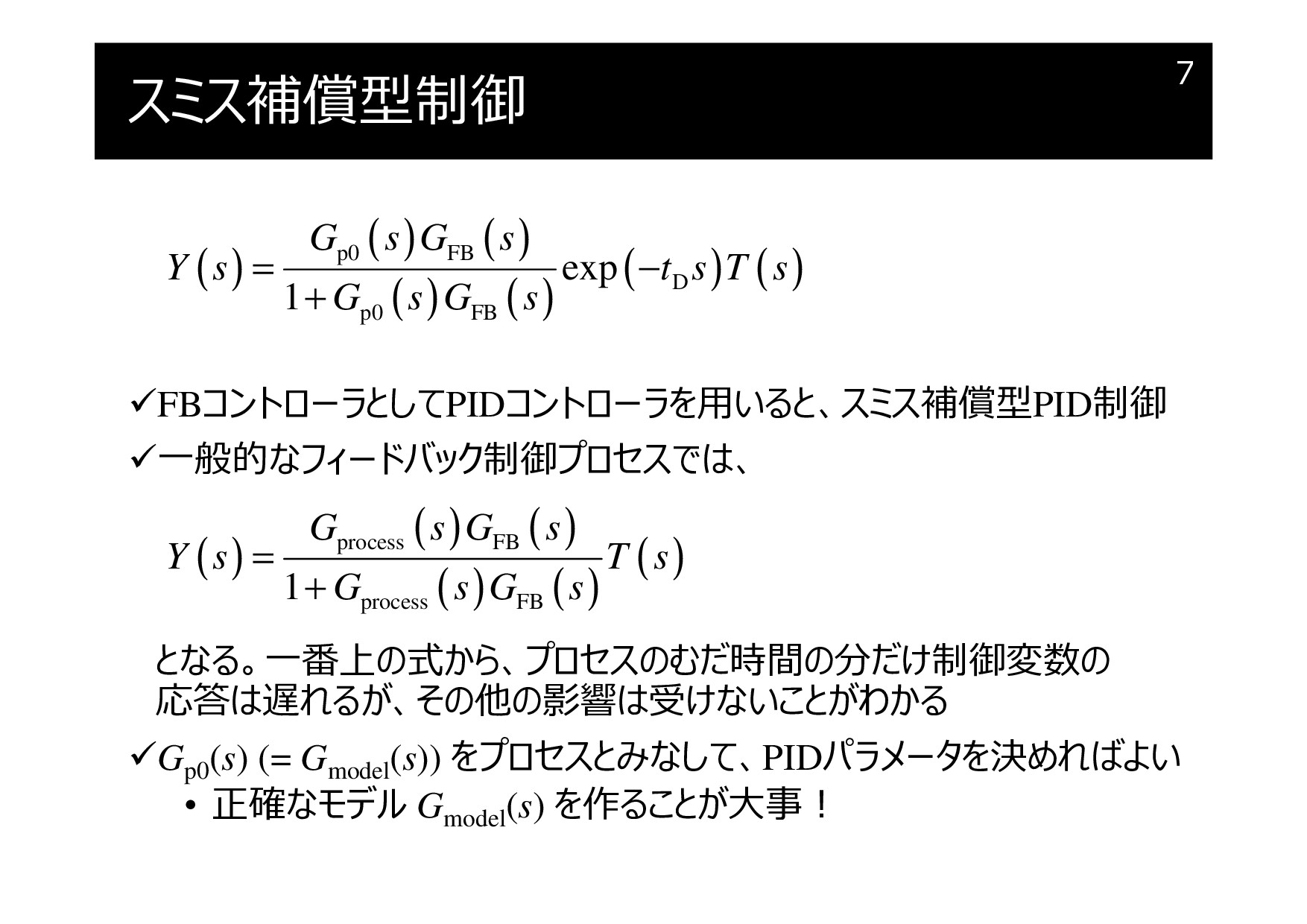
スミス補償型制御
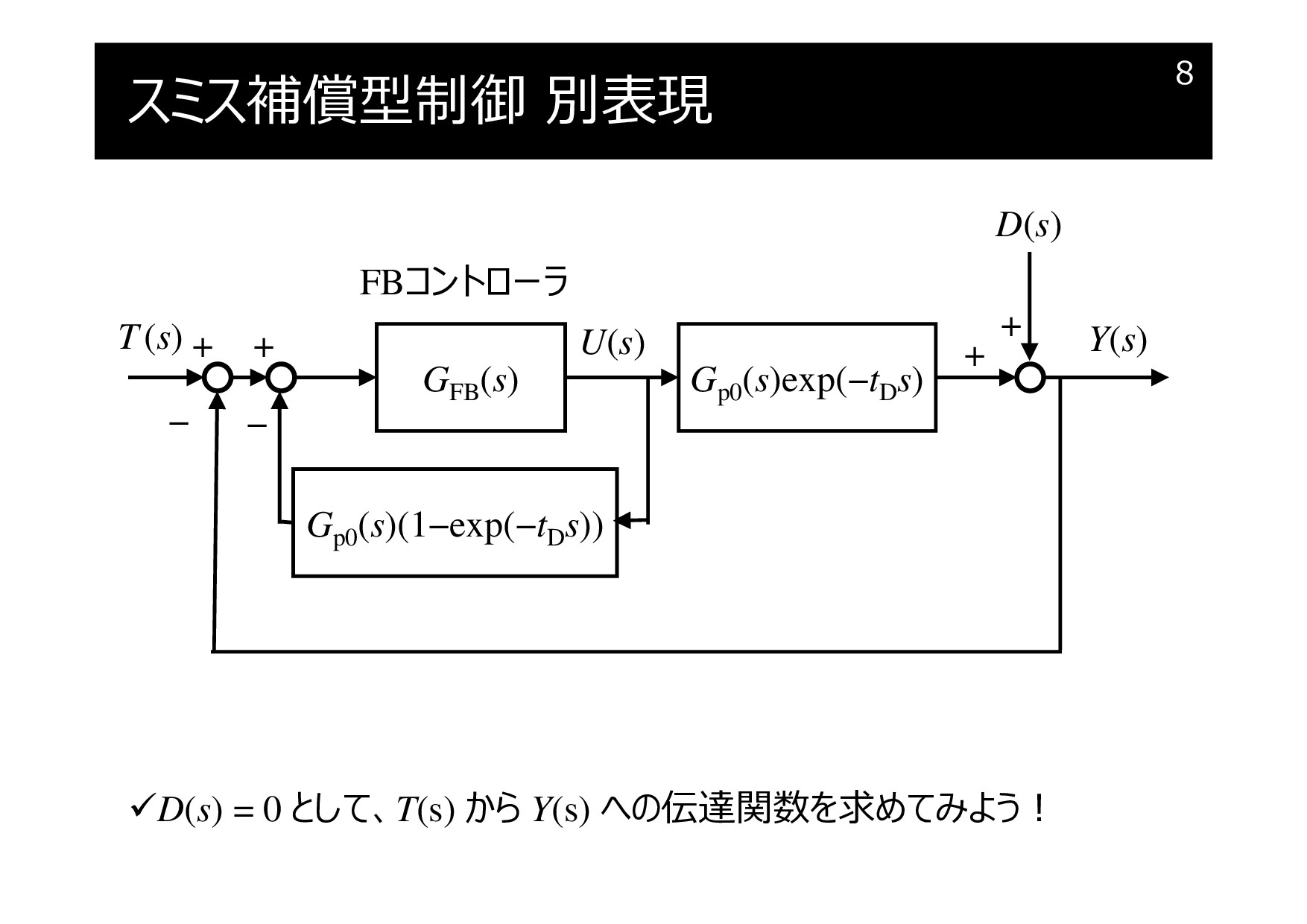
スミス補償型制御 別表現
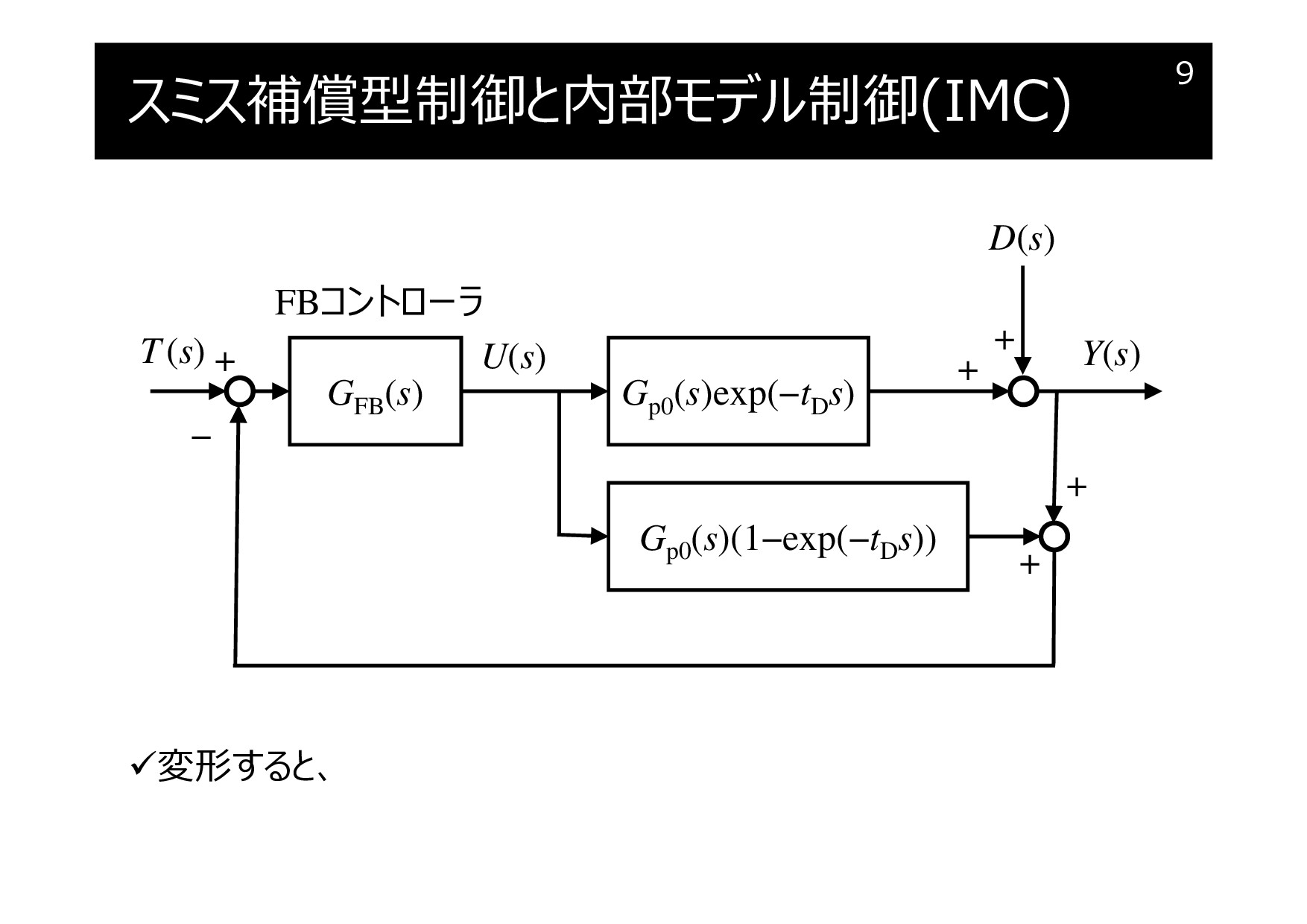
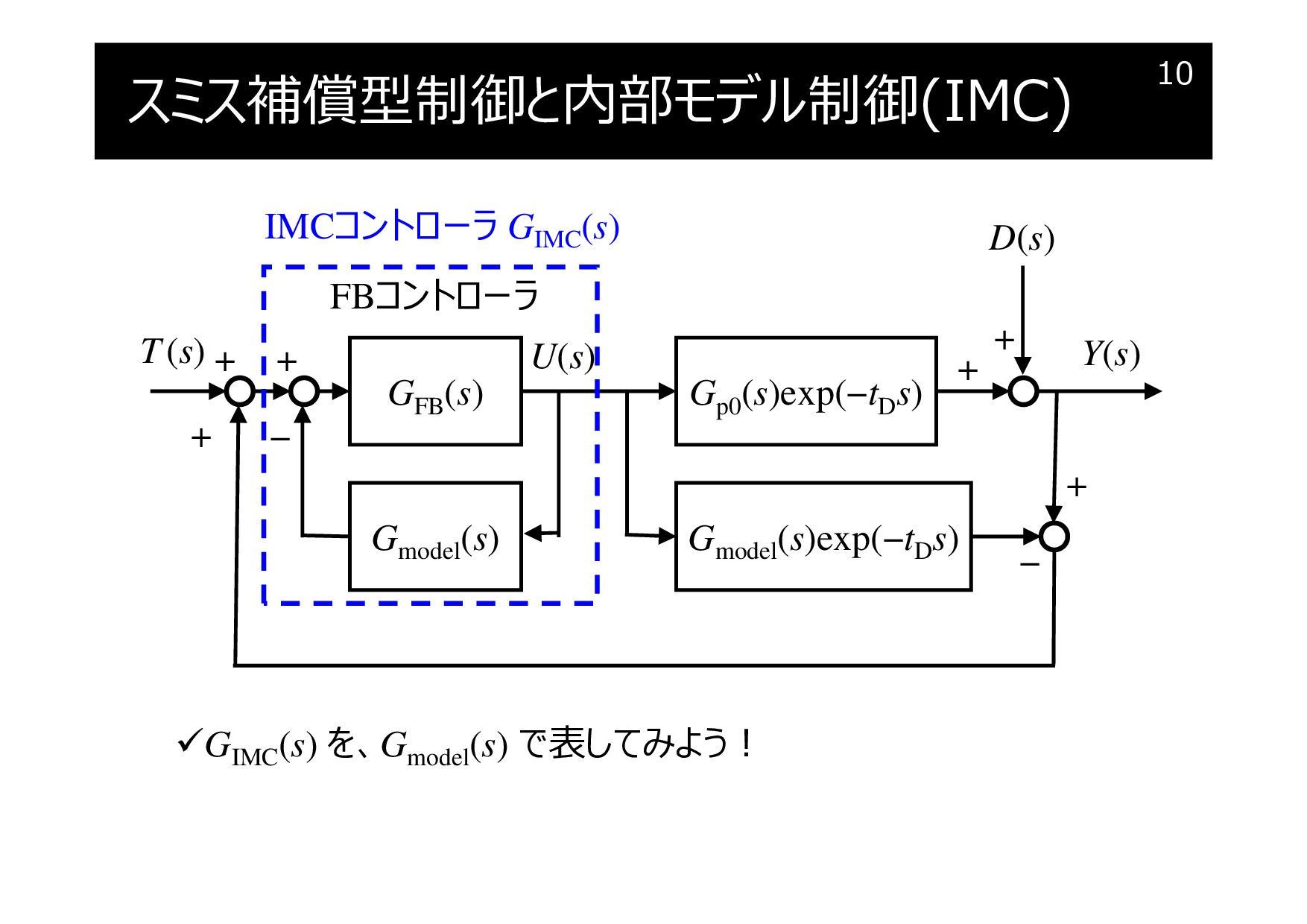
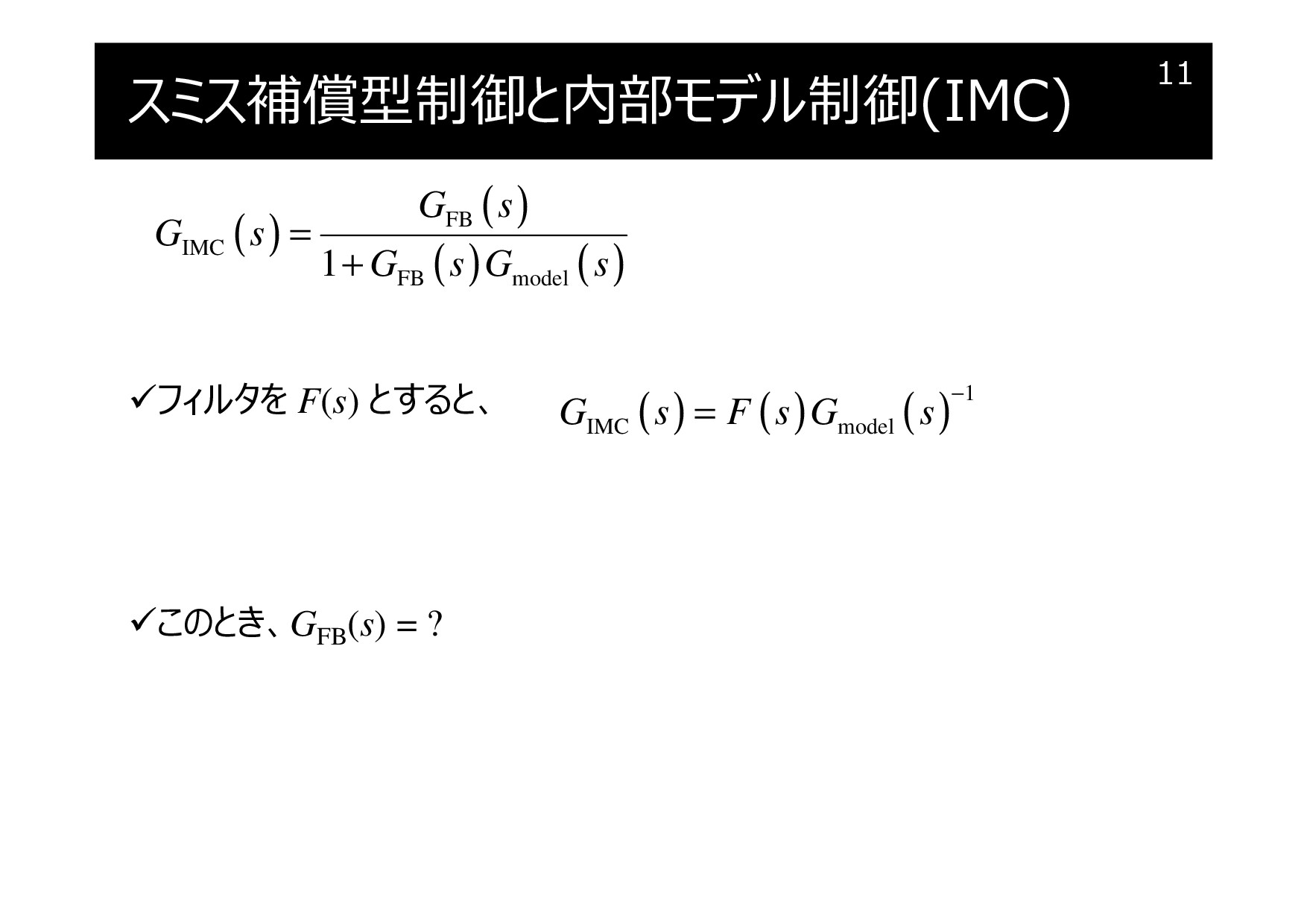
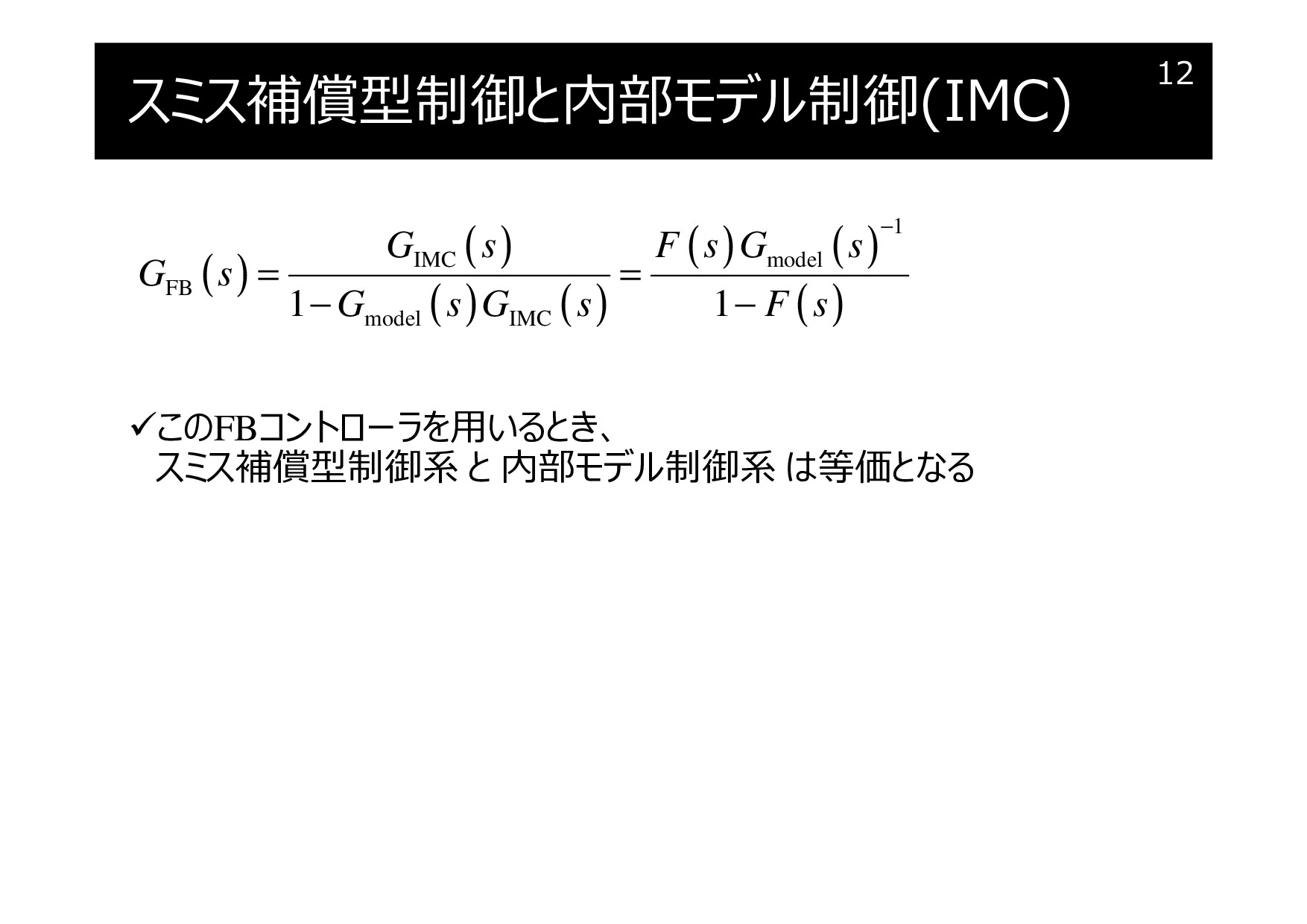
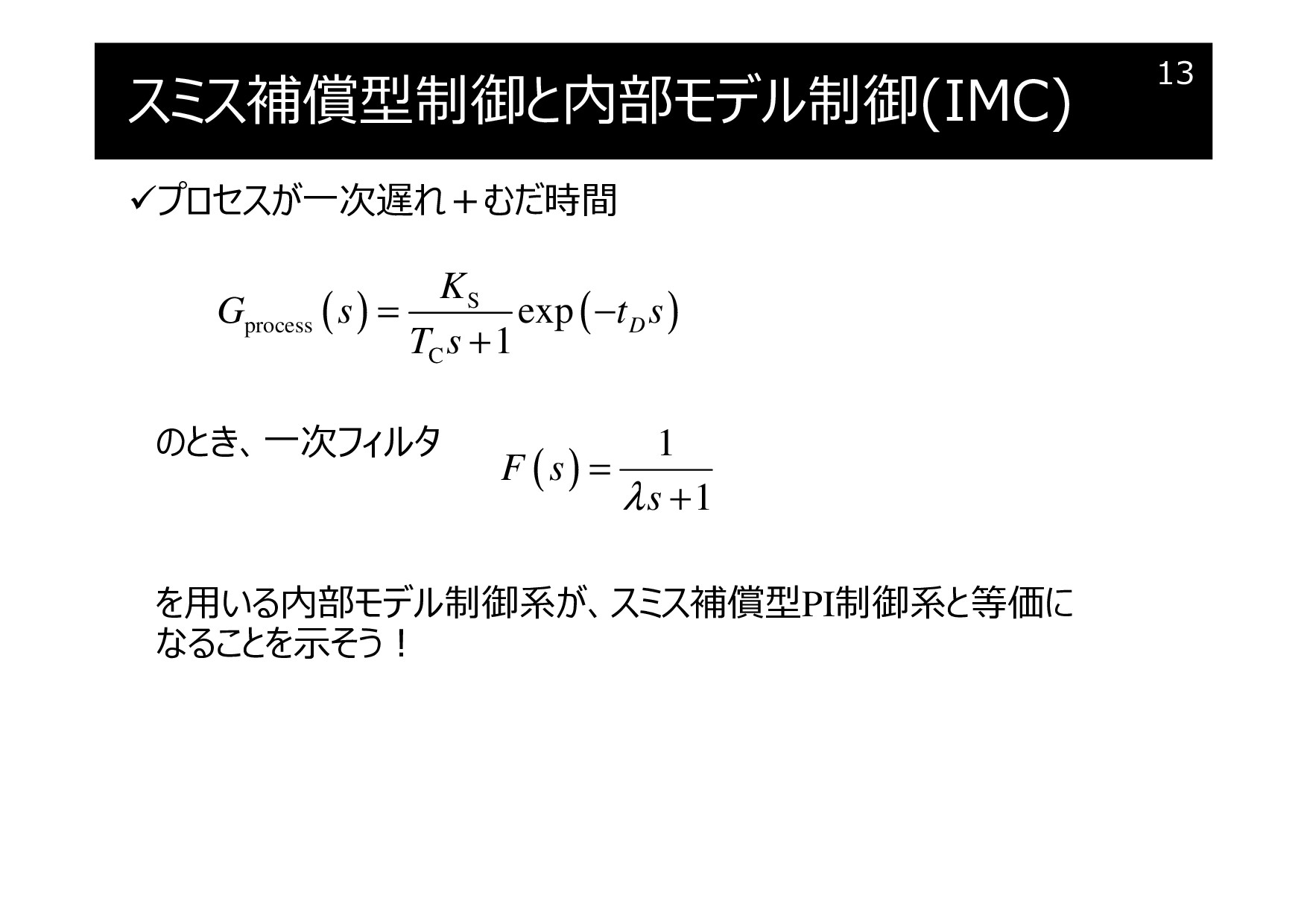
スミス補償型制御と内部モデル制御(IMC)
モデル予測制御
ソフトセンサー
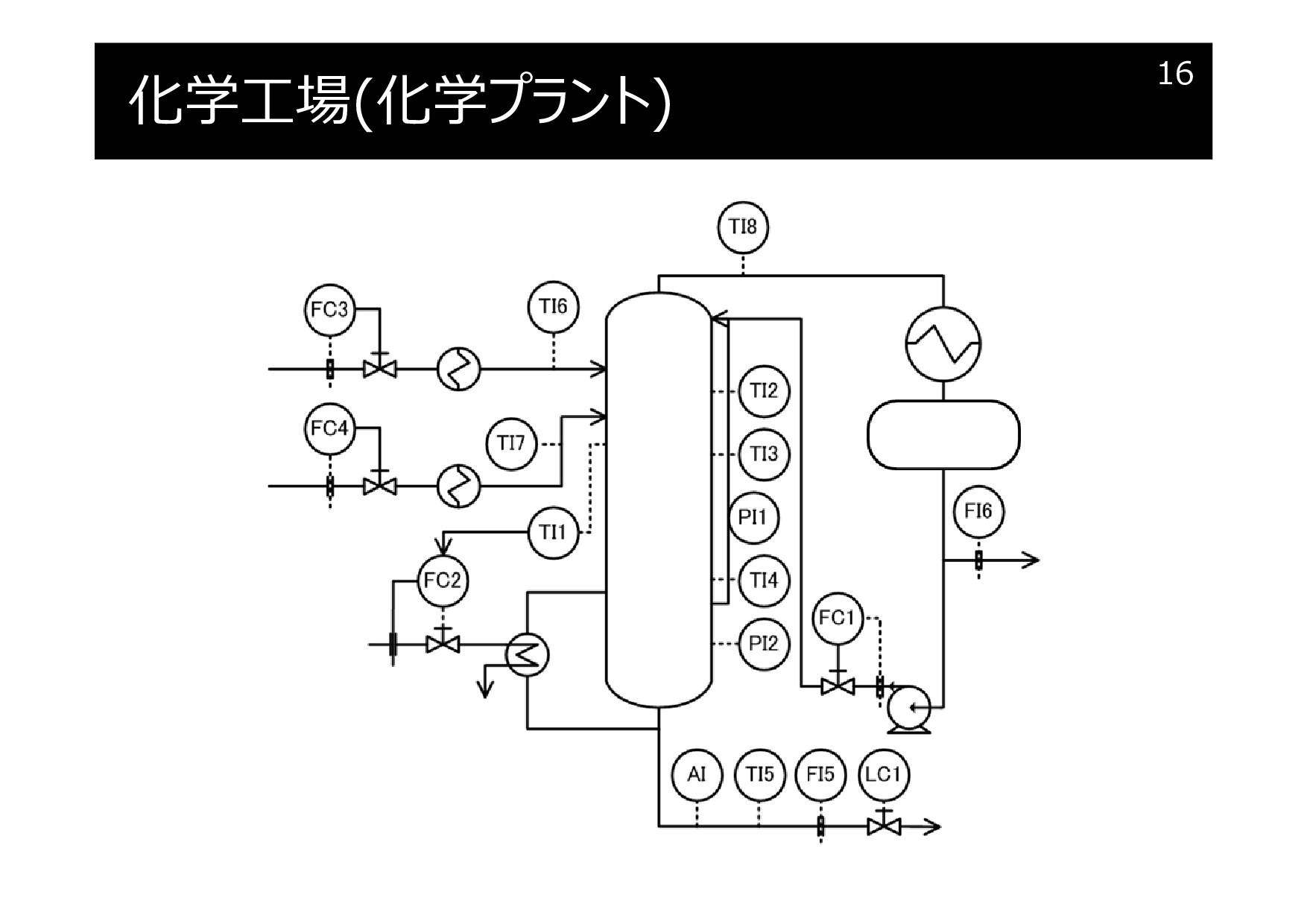
化学工場(化学プラント)
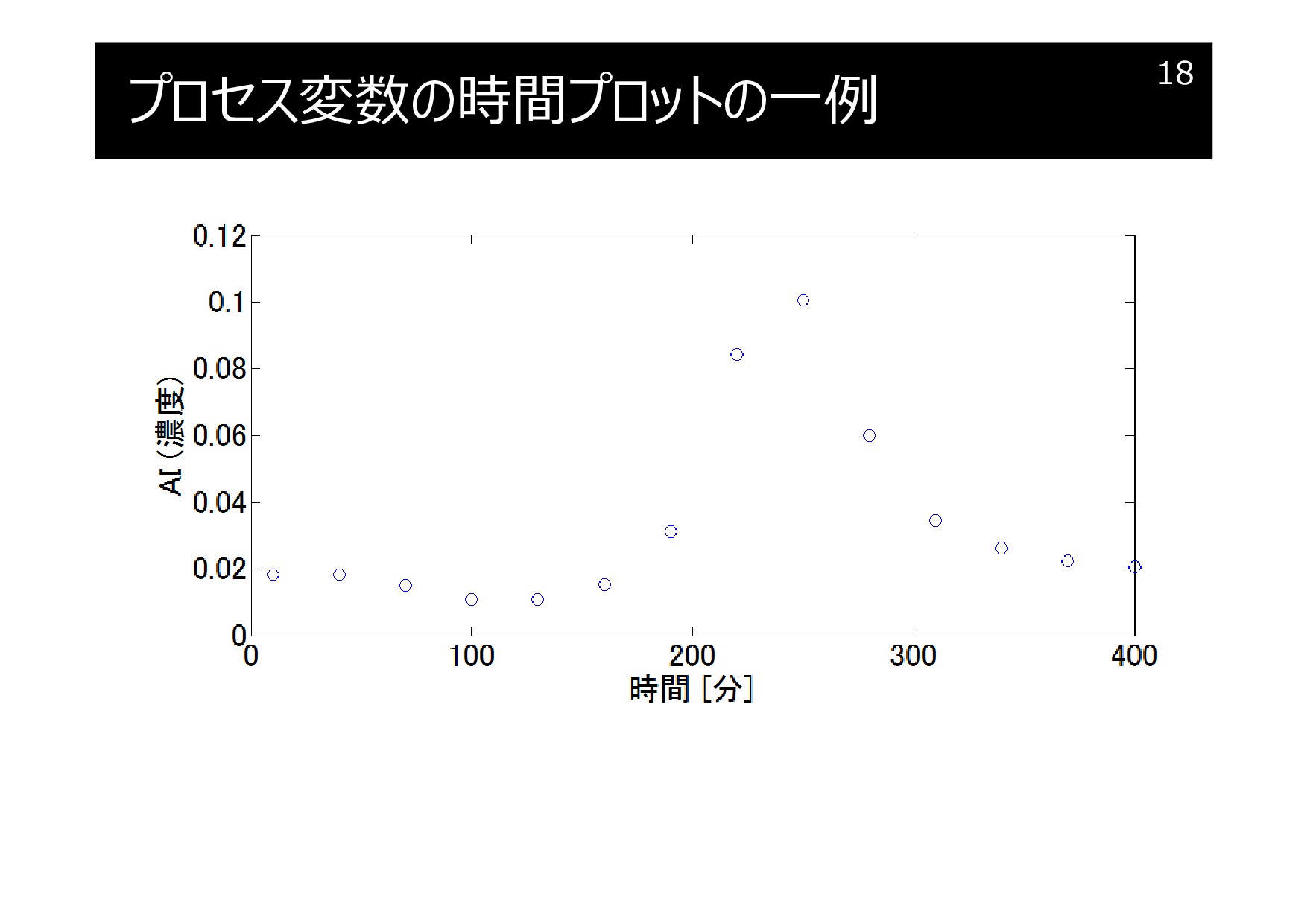
プロセス変数の時間プロットの一例
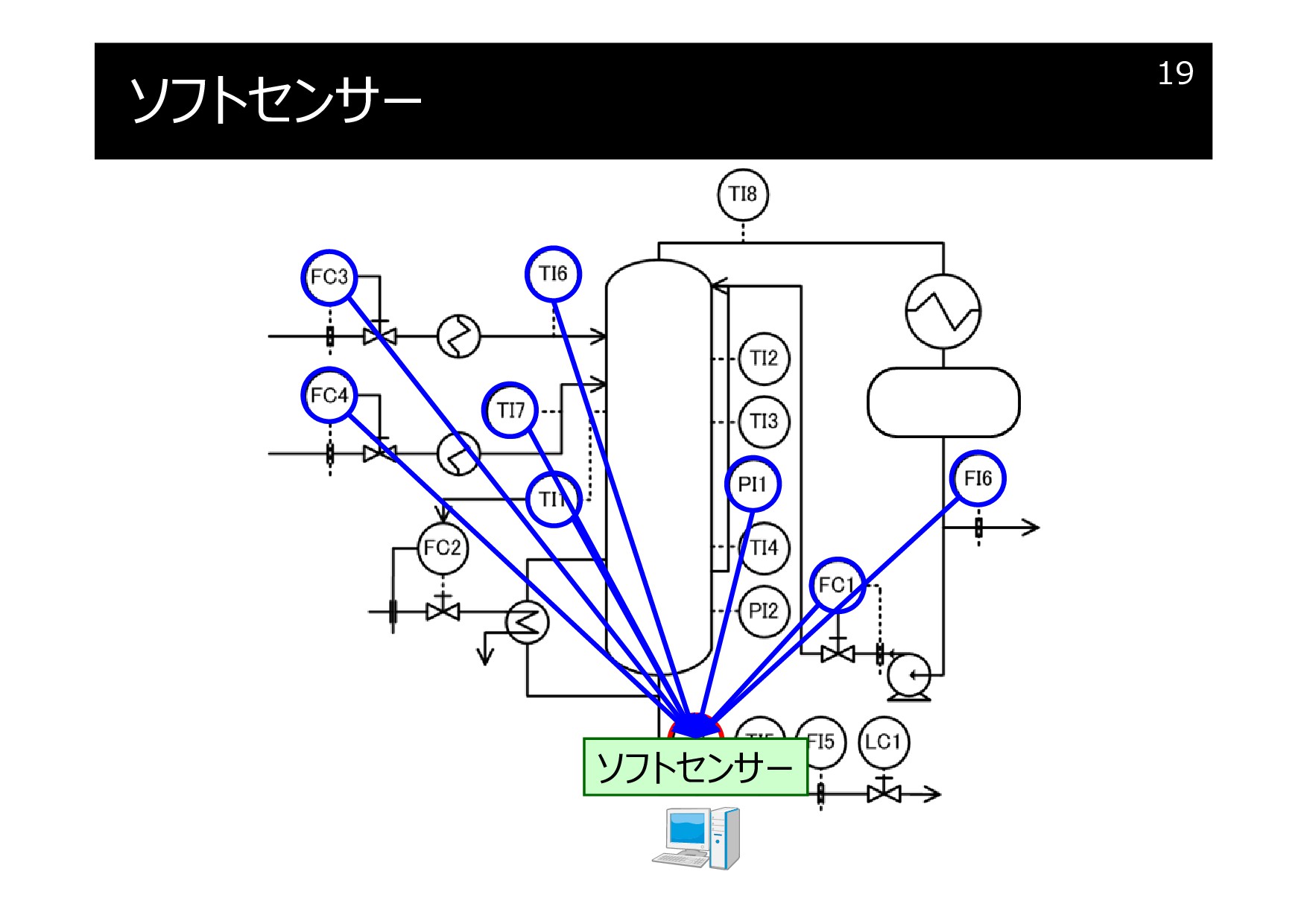
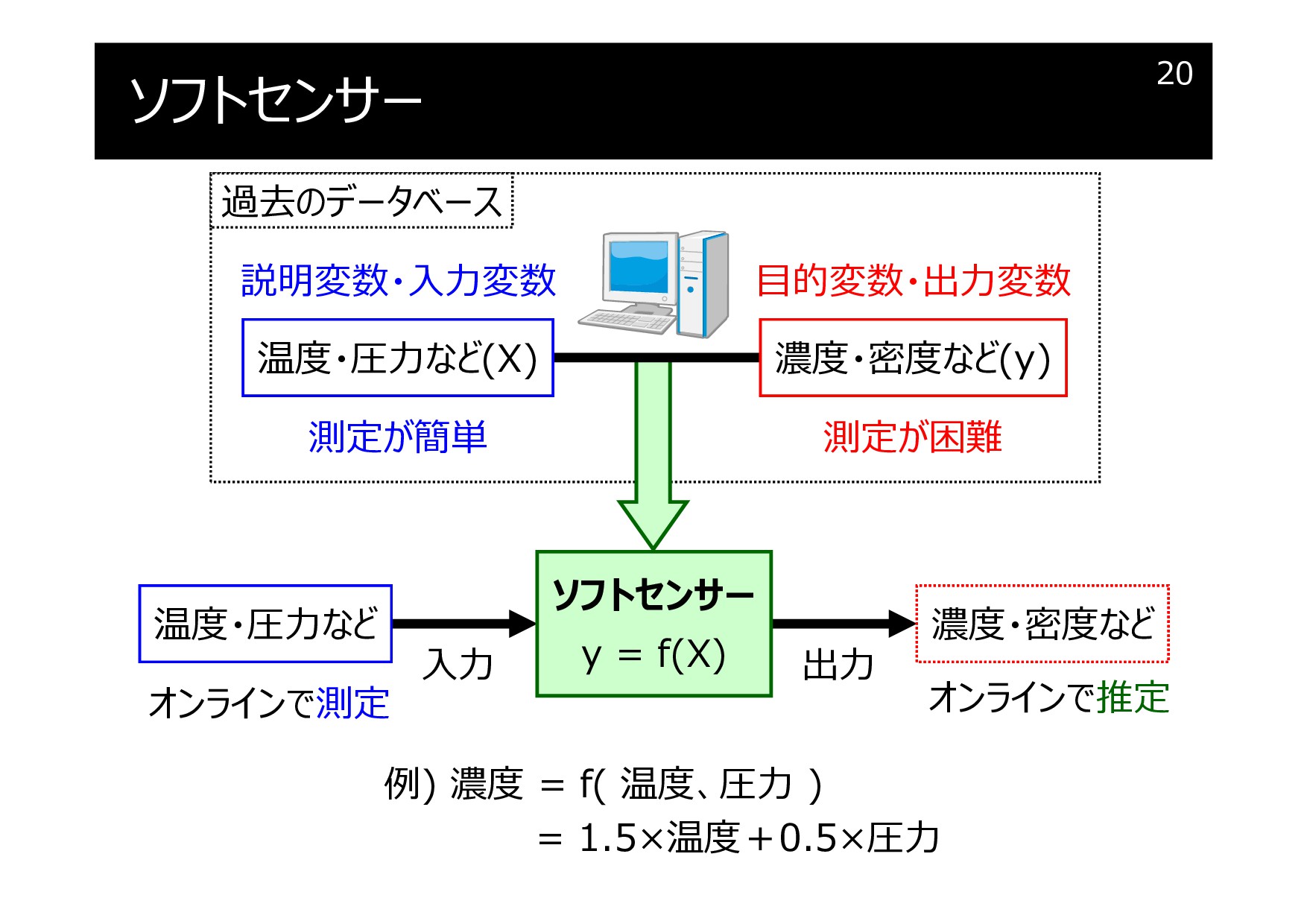
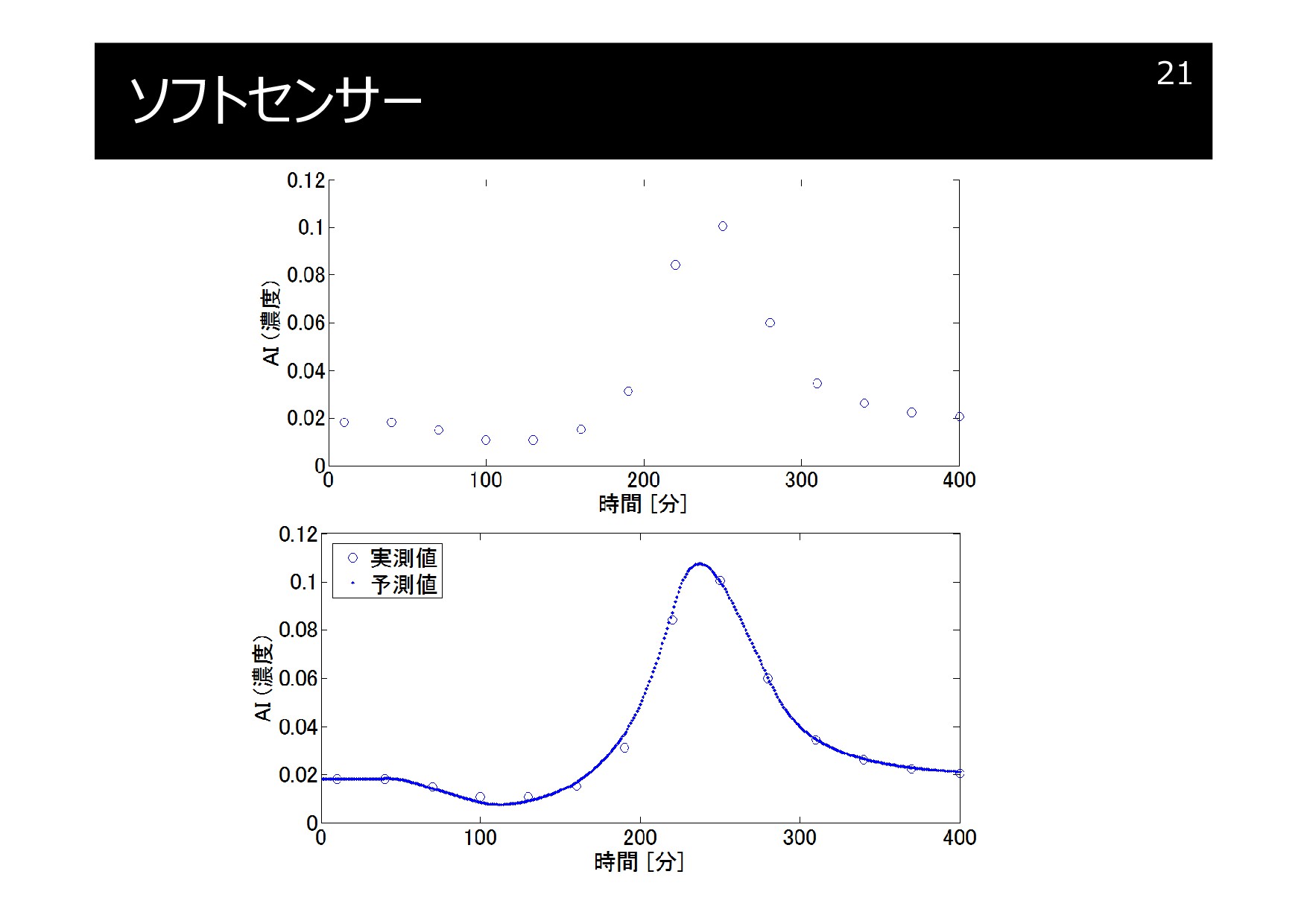
ソフトセンサー
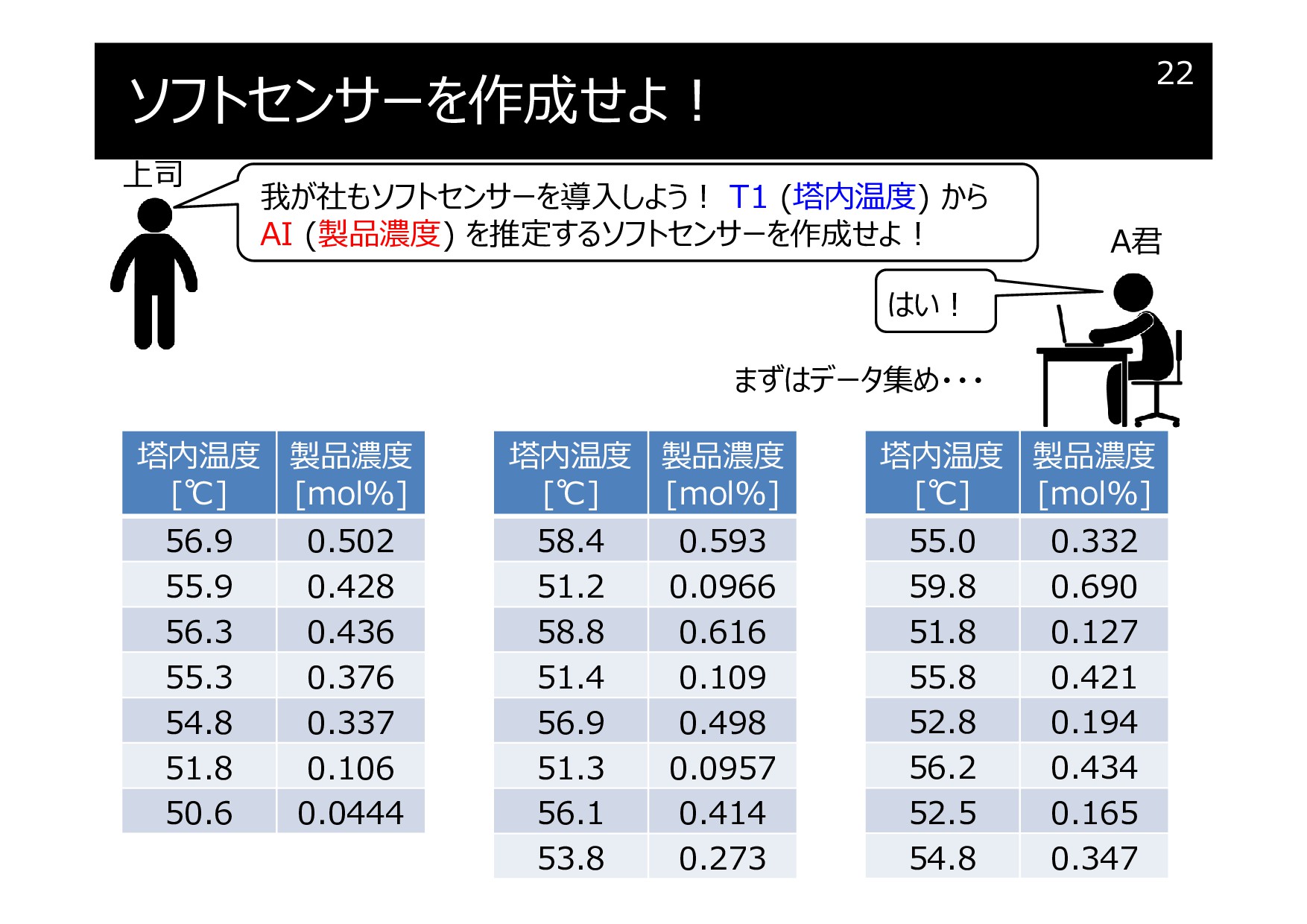
ソフトセンサーを作成せよ!
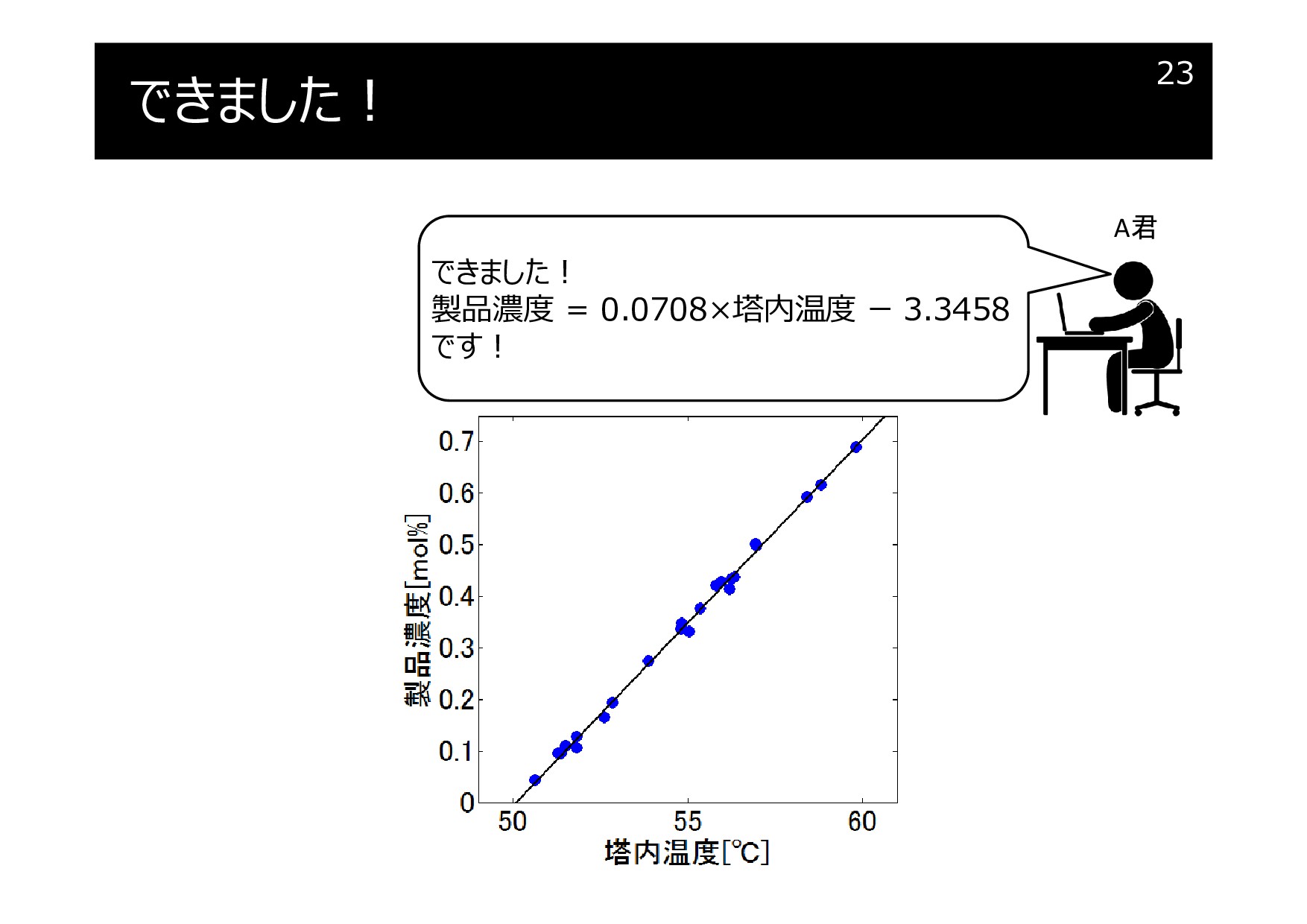
できました!
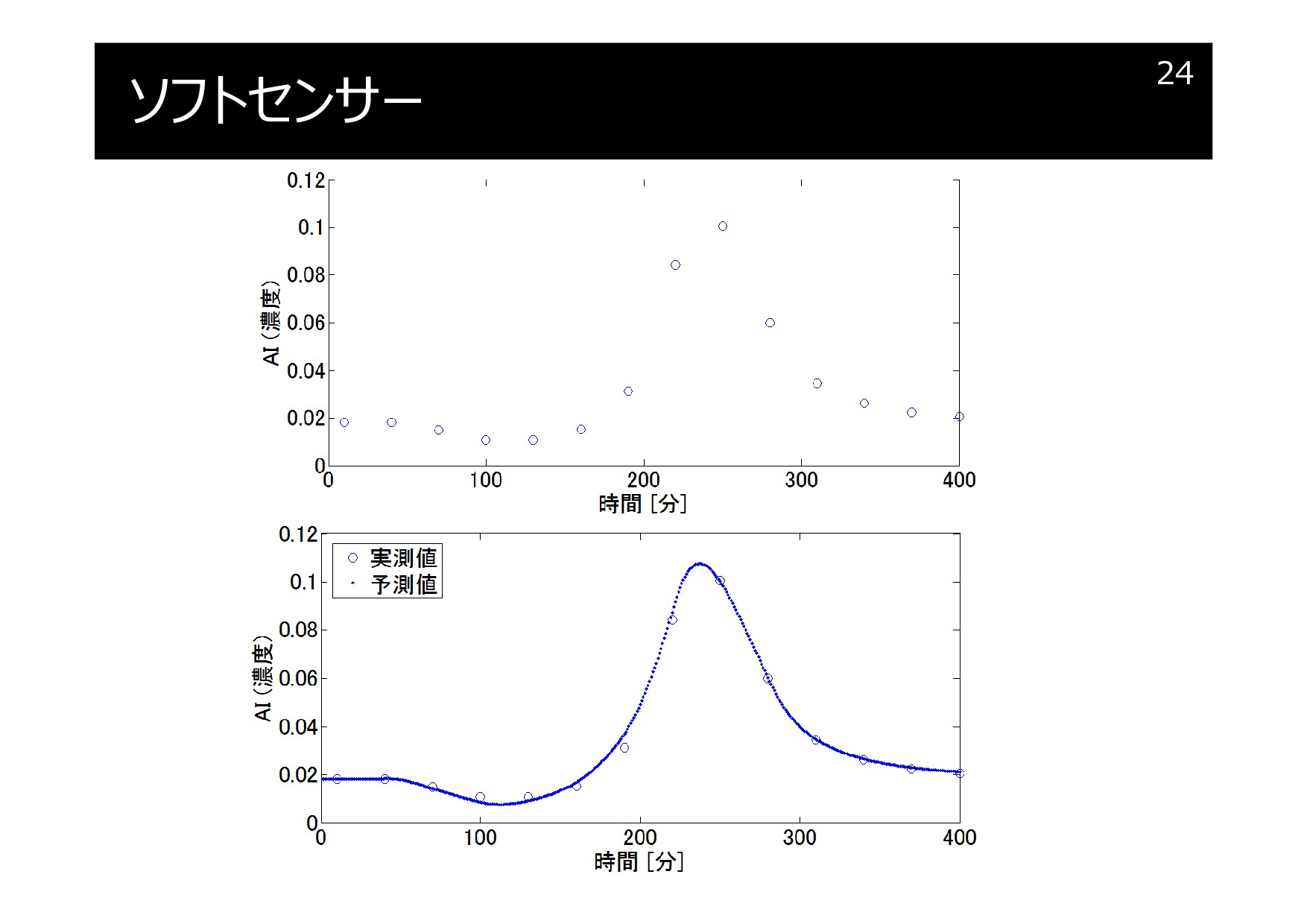
ソフトセンサー
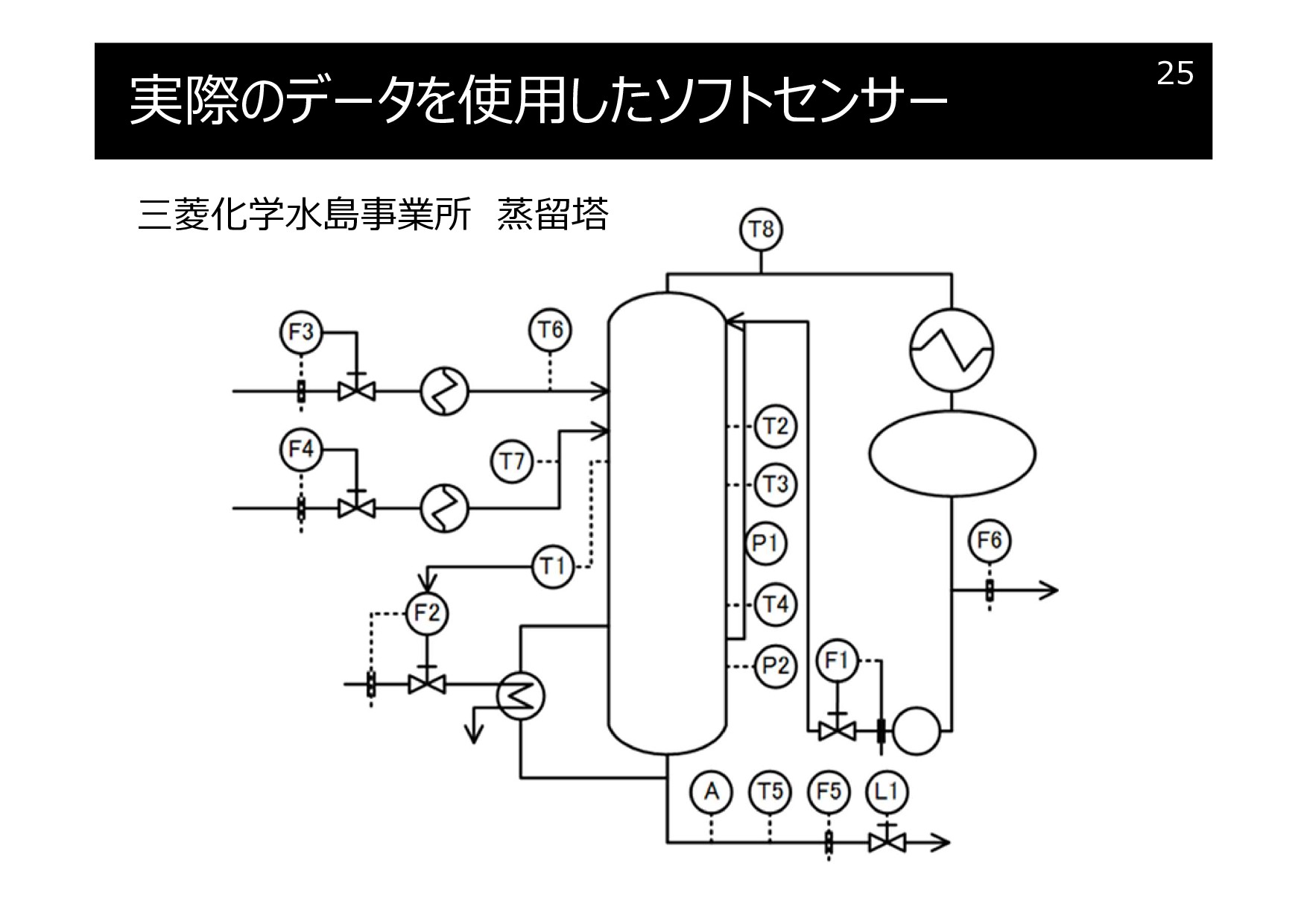
実際のデータを使用したソフトセンサー
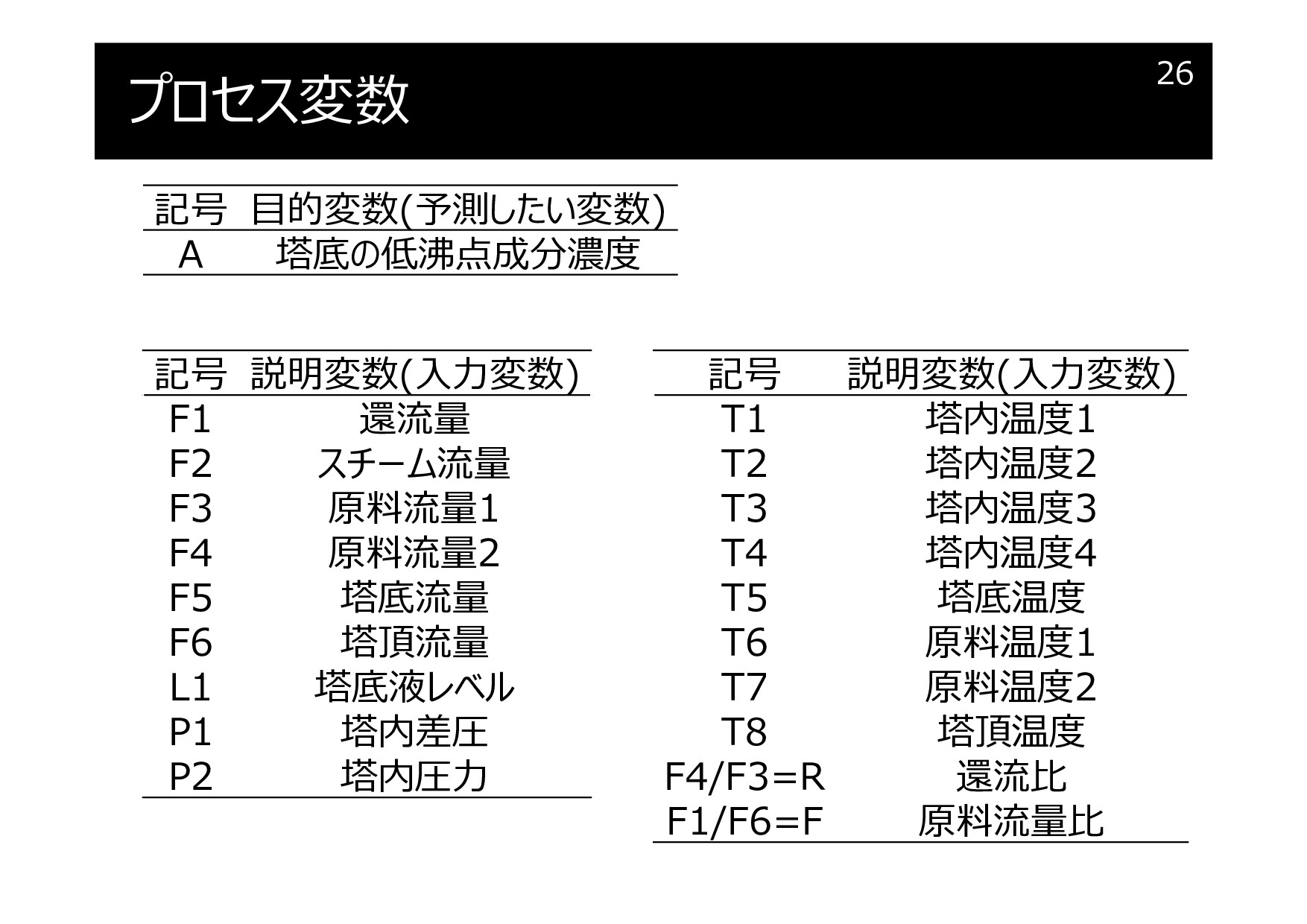
プロセス変数
ソフトセンサー構築手法
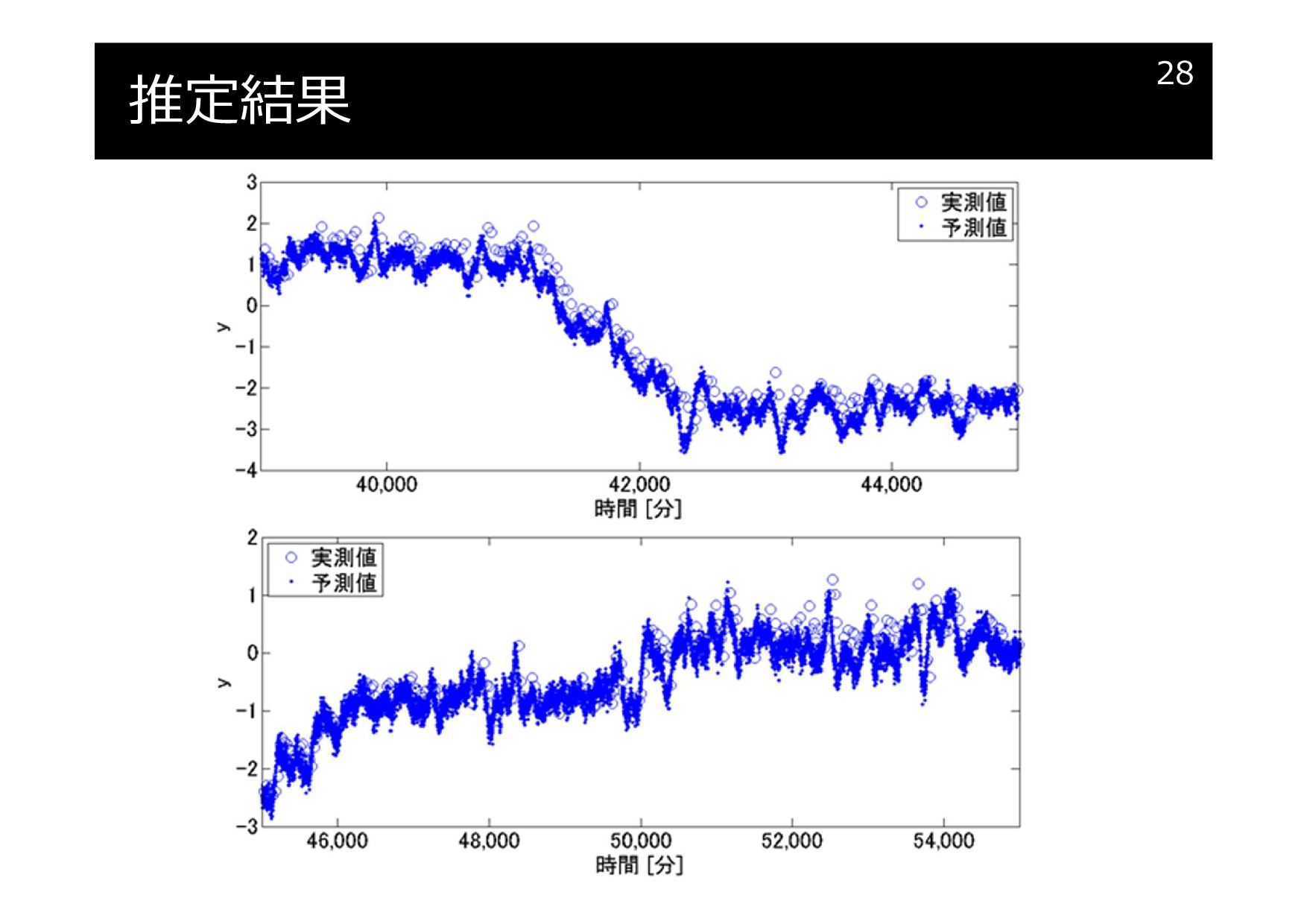
推定結果
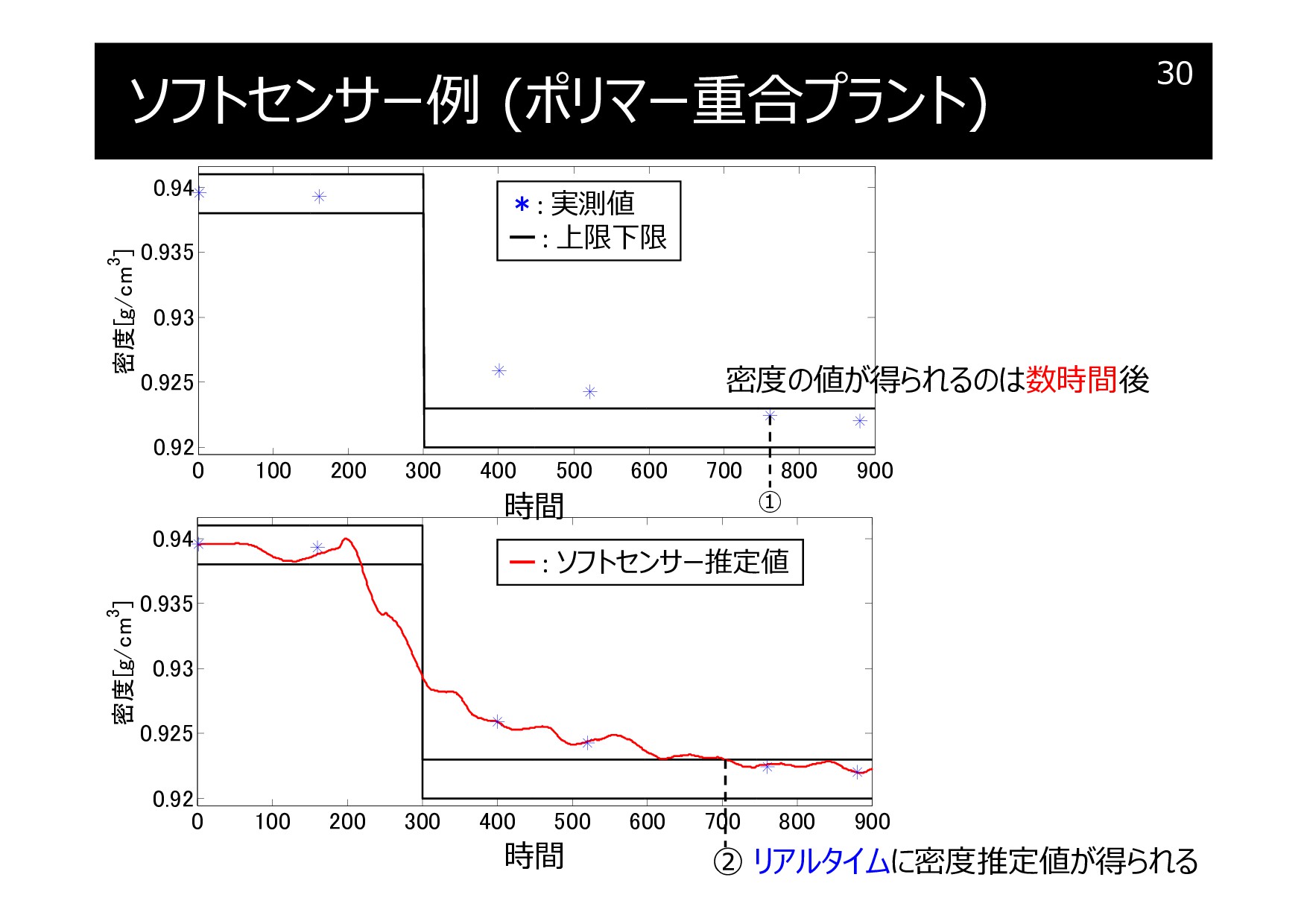
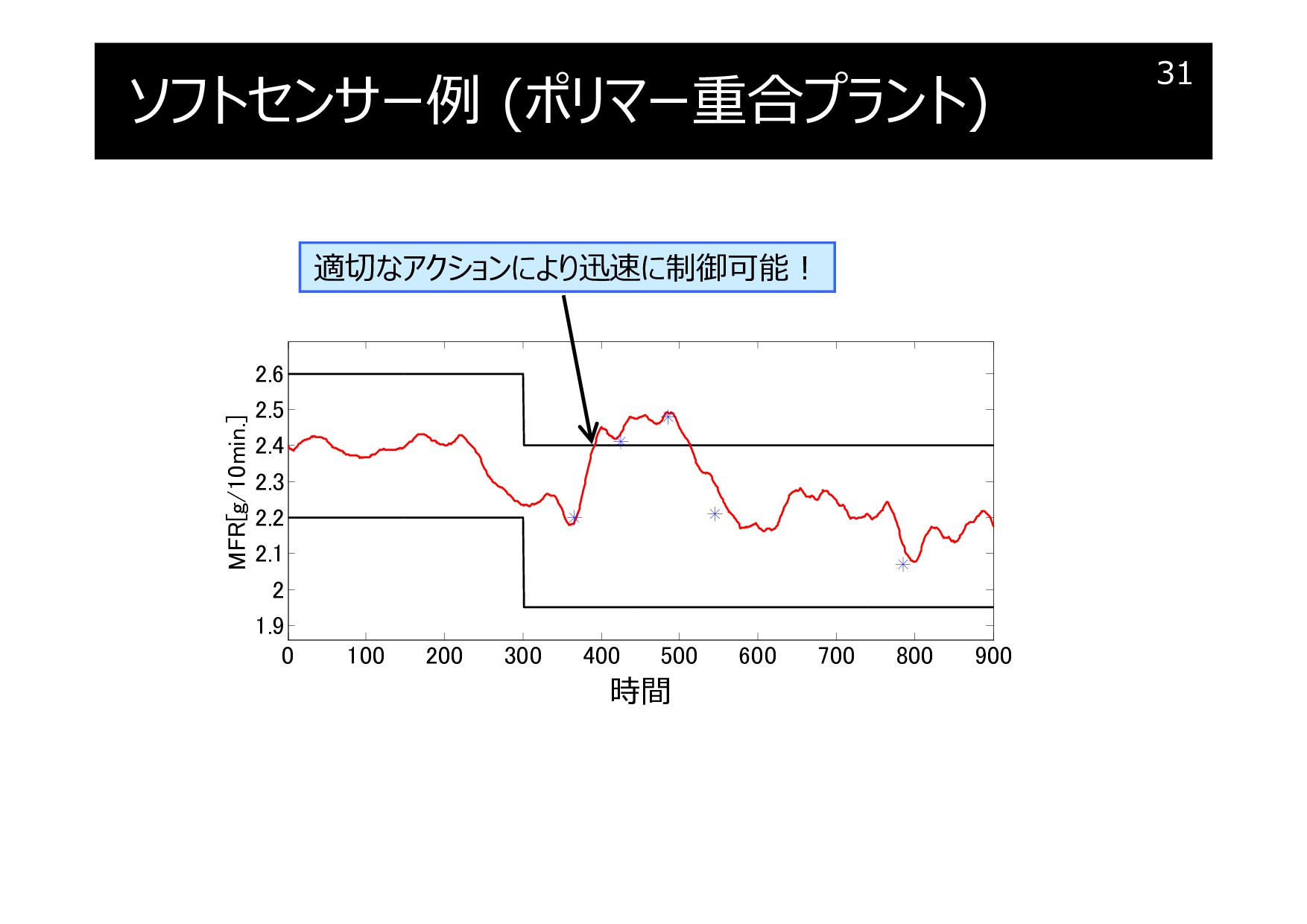
ソフトセンサー例 (ポリマー重合プラント)
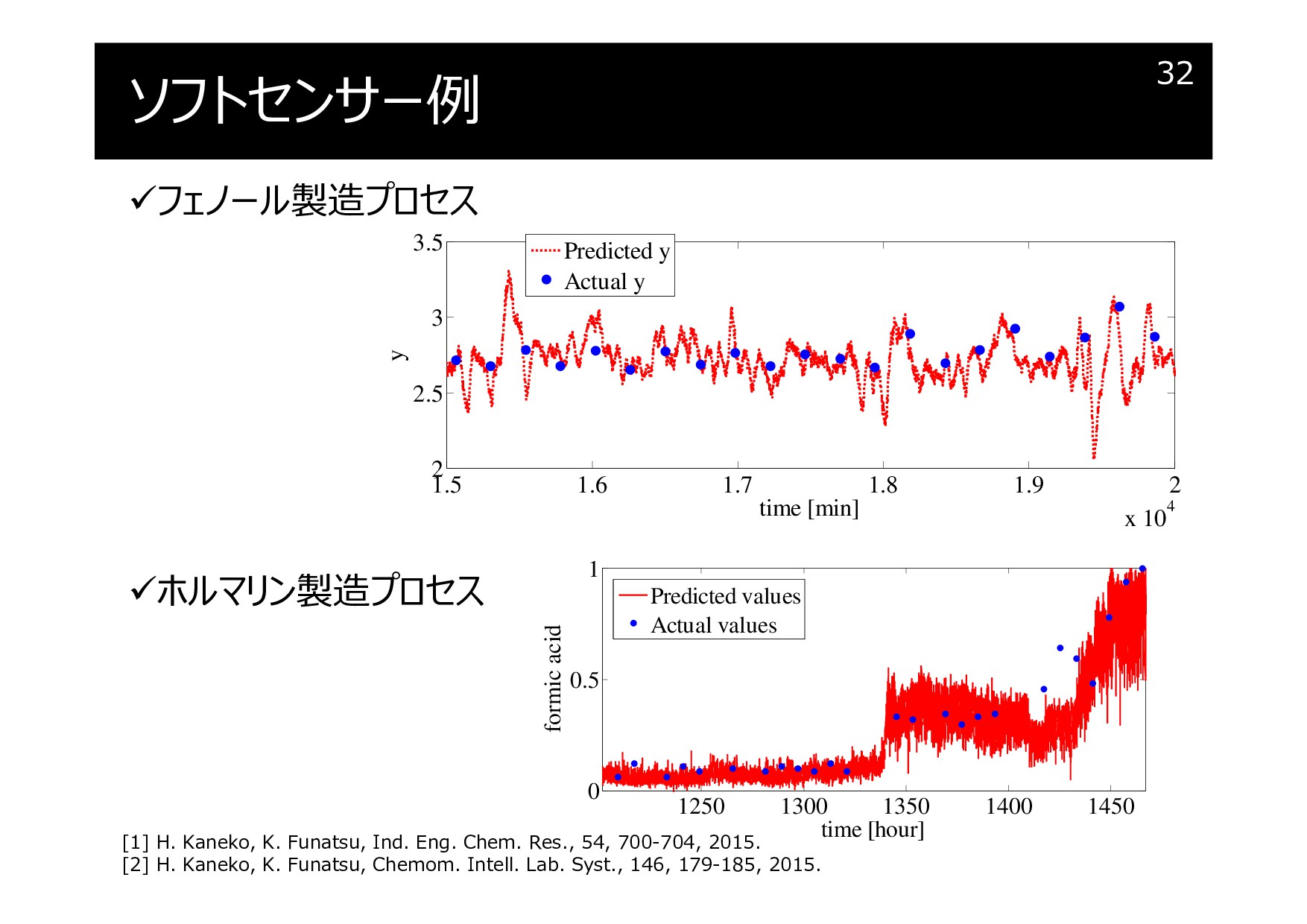
ソフトセンサー例
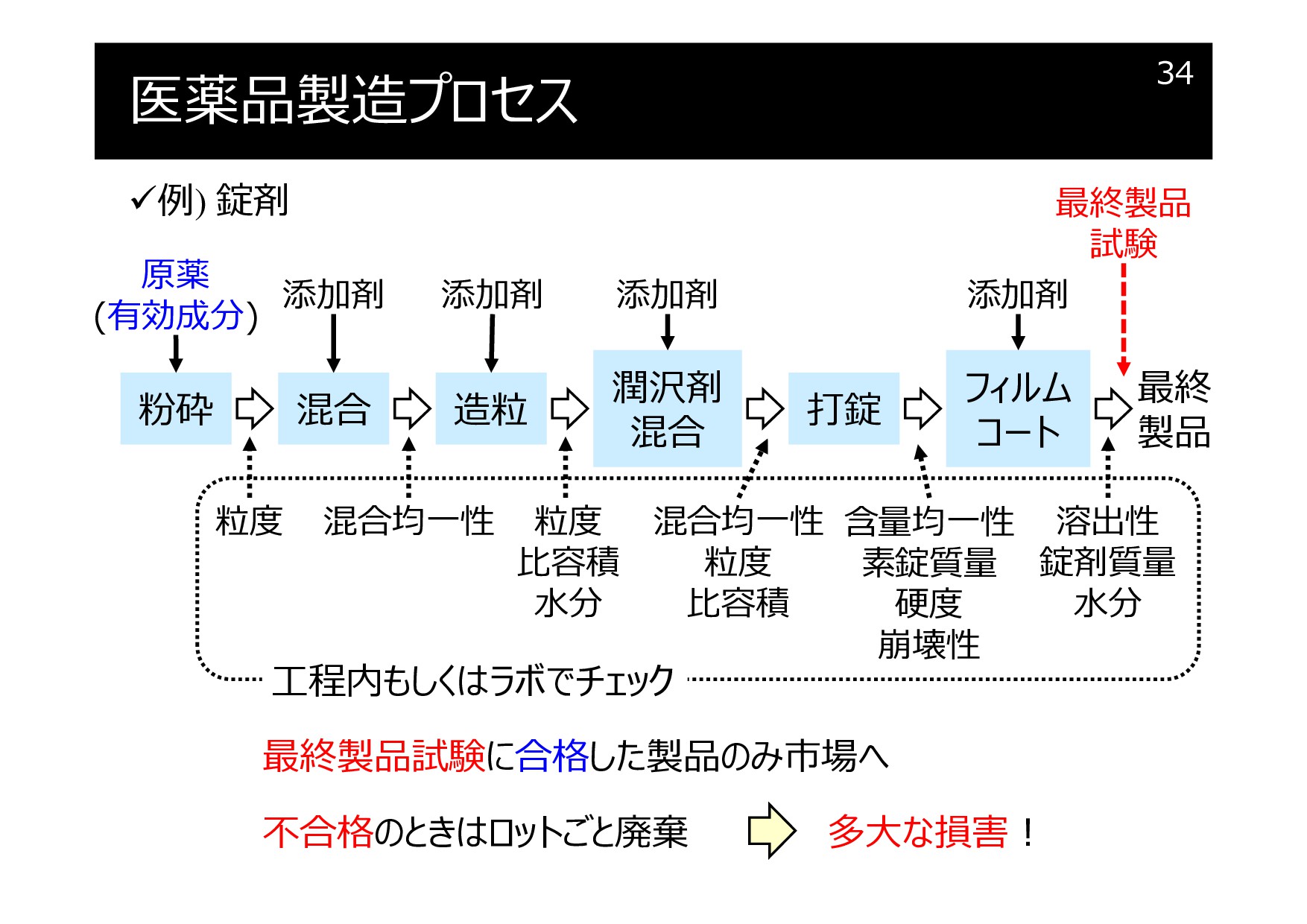
医薬品製造プロセス
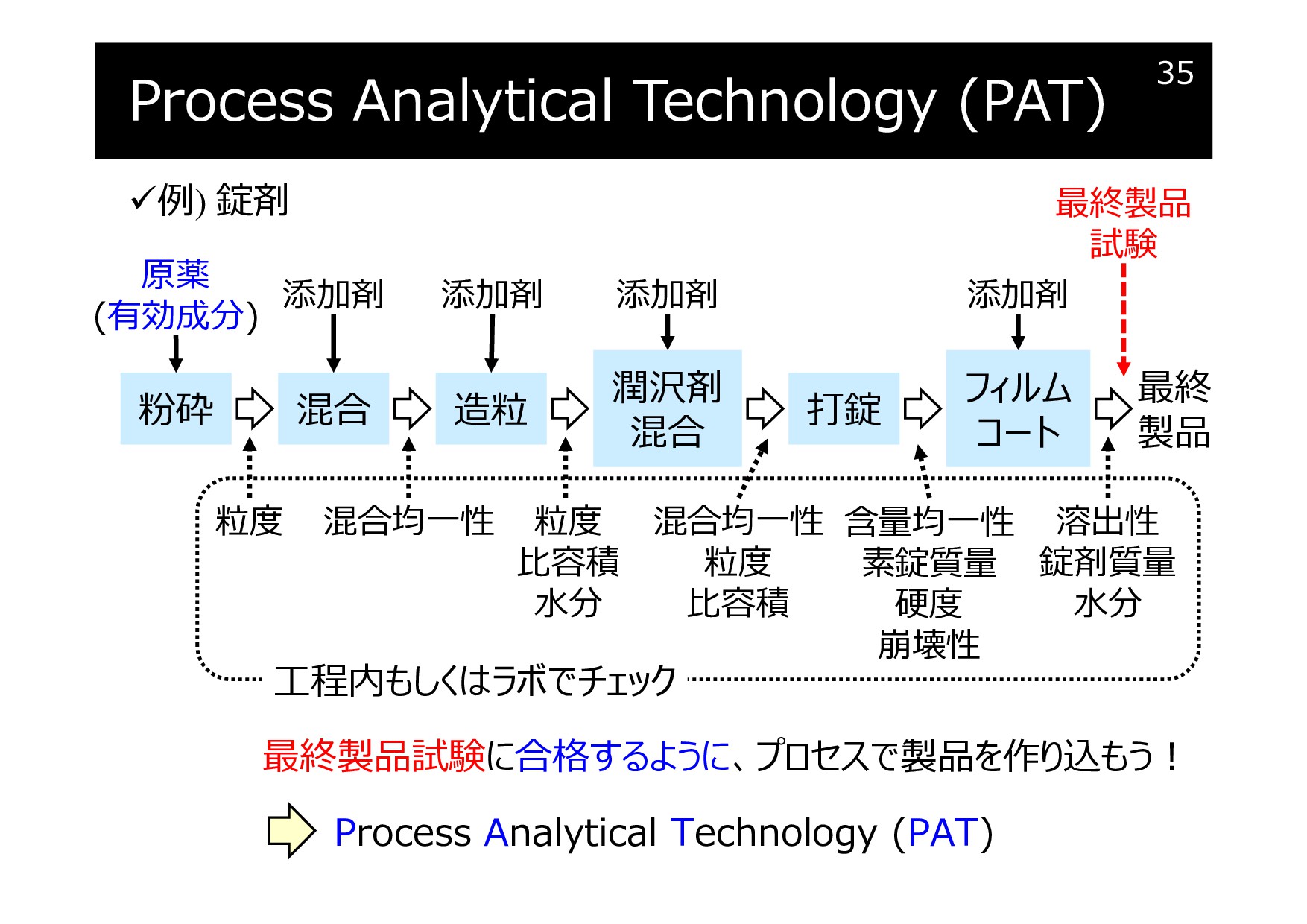
Process Analytical Technology (PAT)
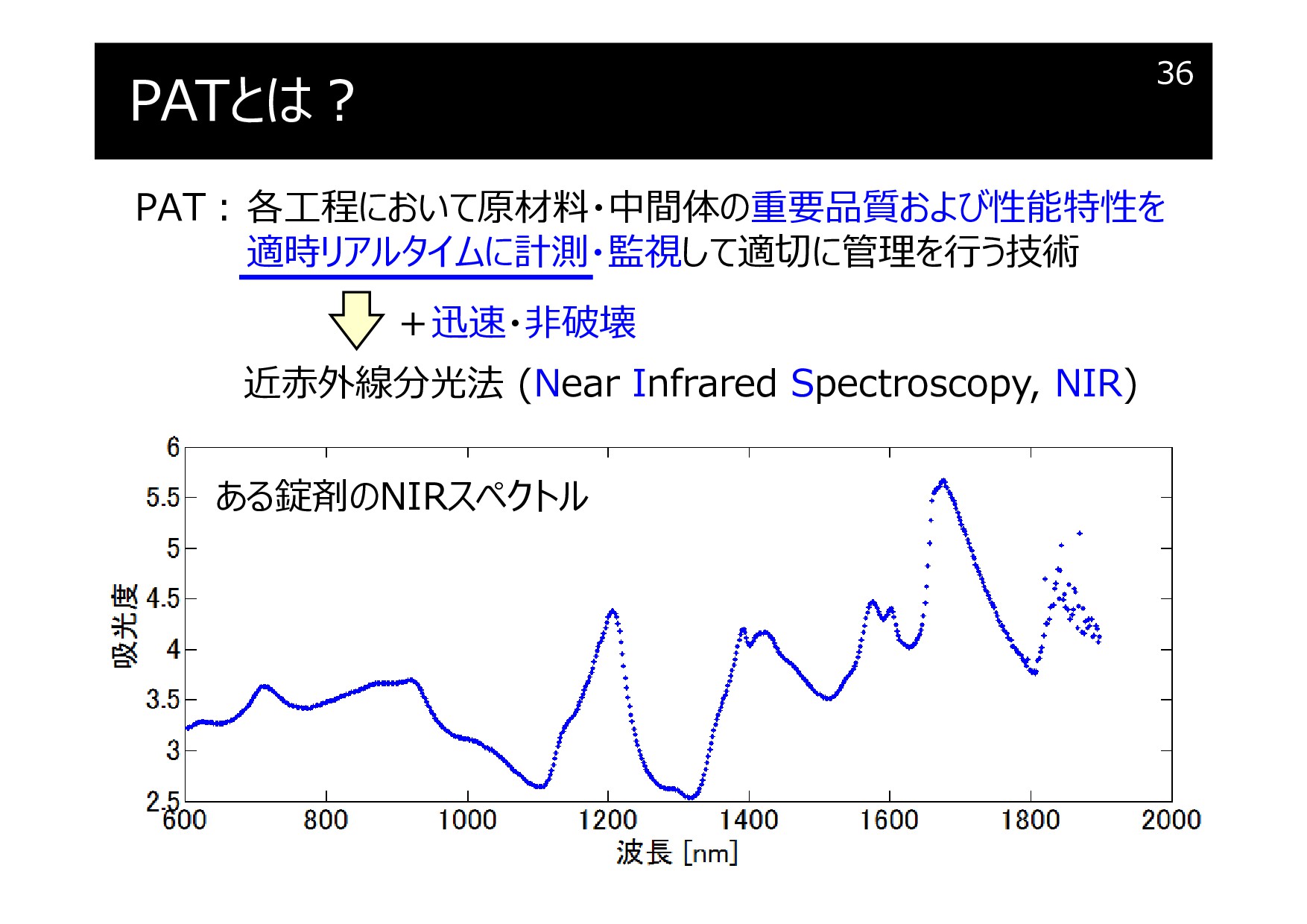
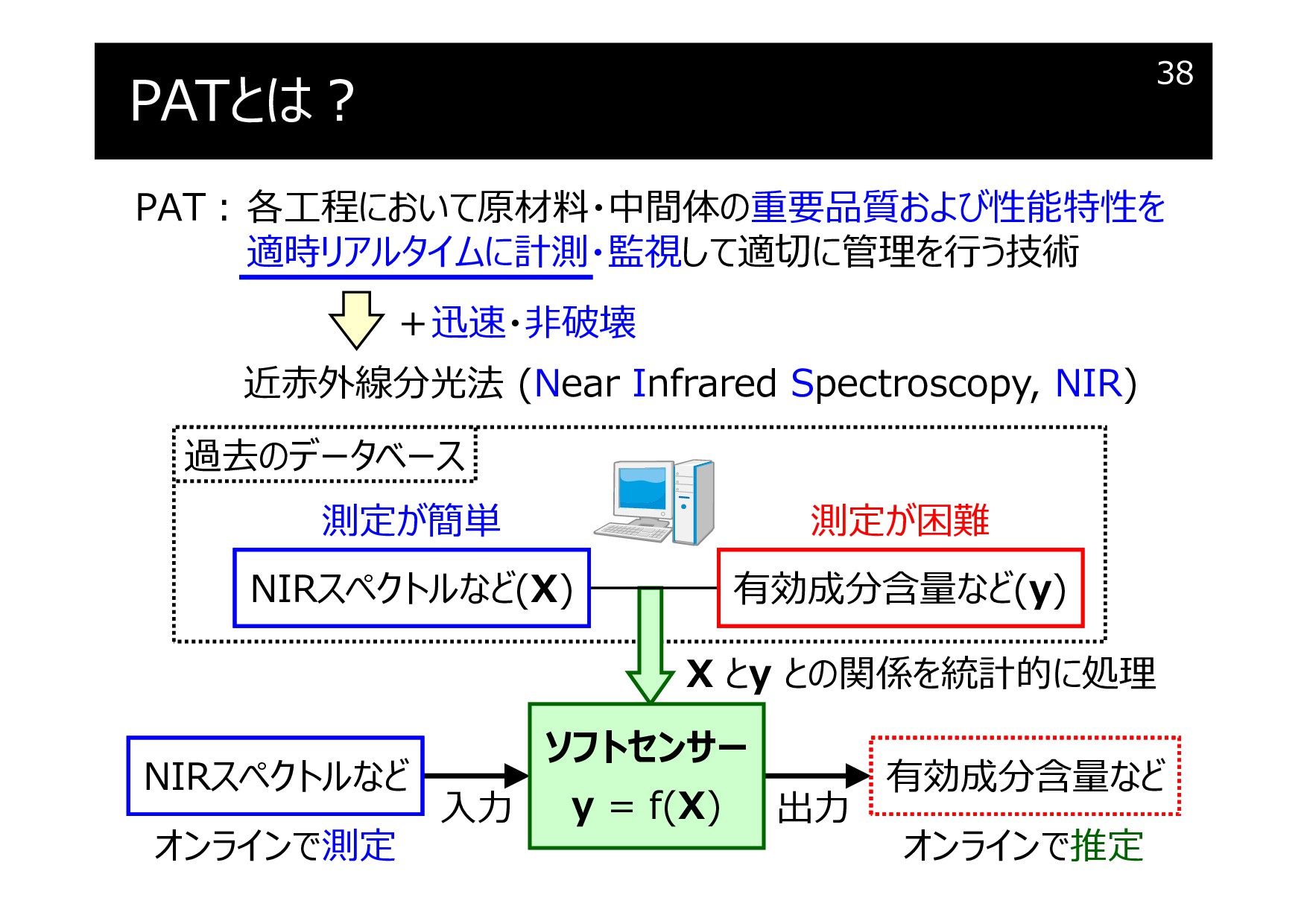
PATとは?
PATとは?
PATとは?
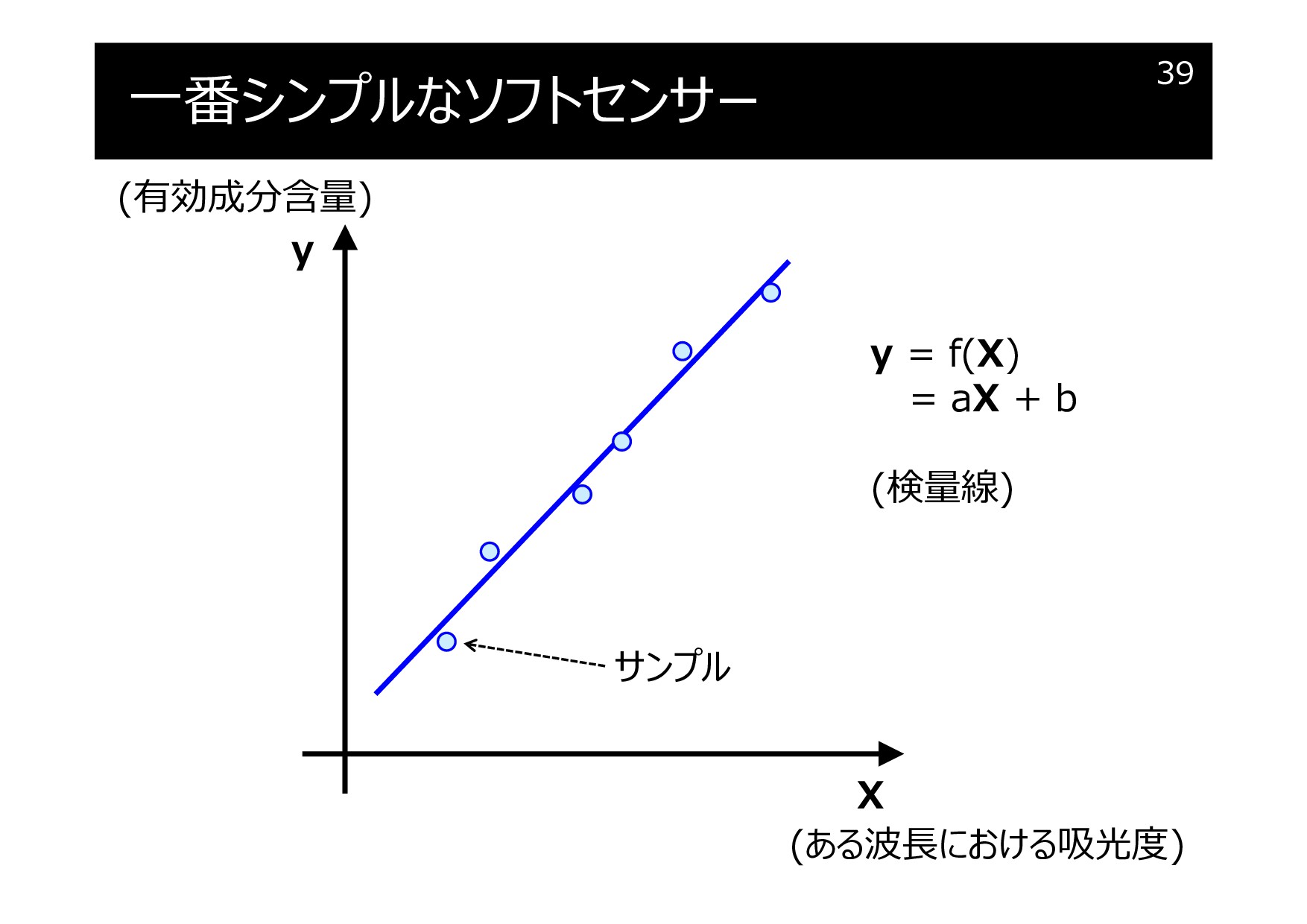
一番シンプルなソフトセンサー
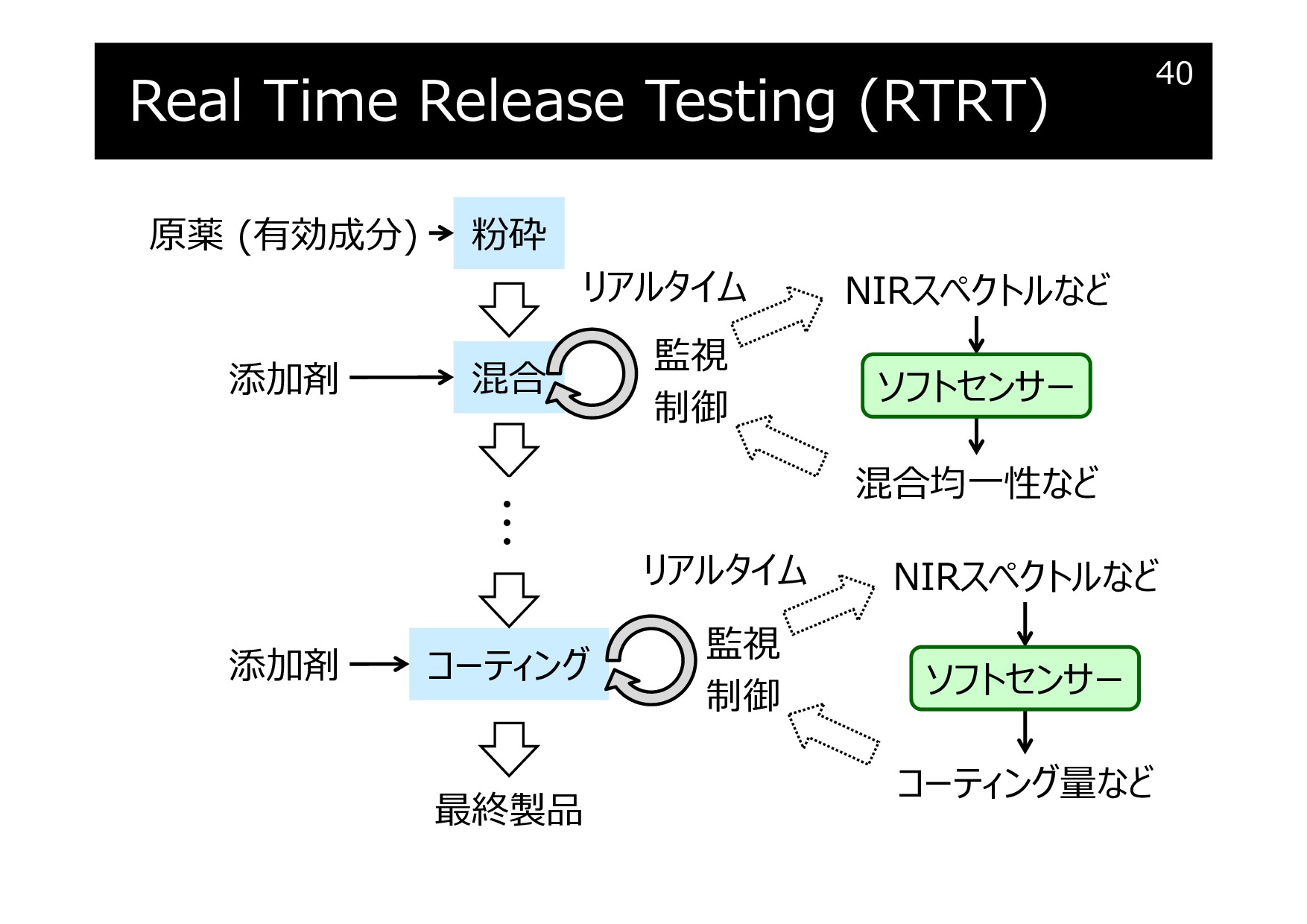
Real Time Release Testing (RTRT)
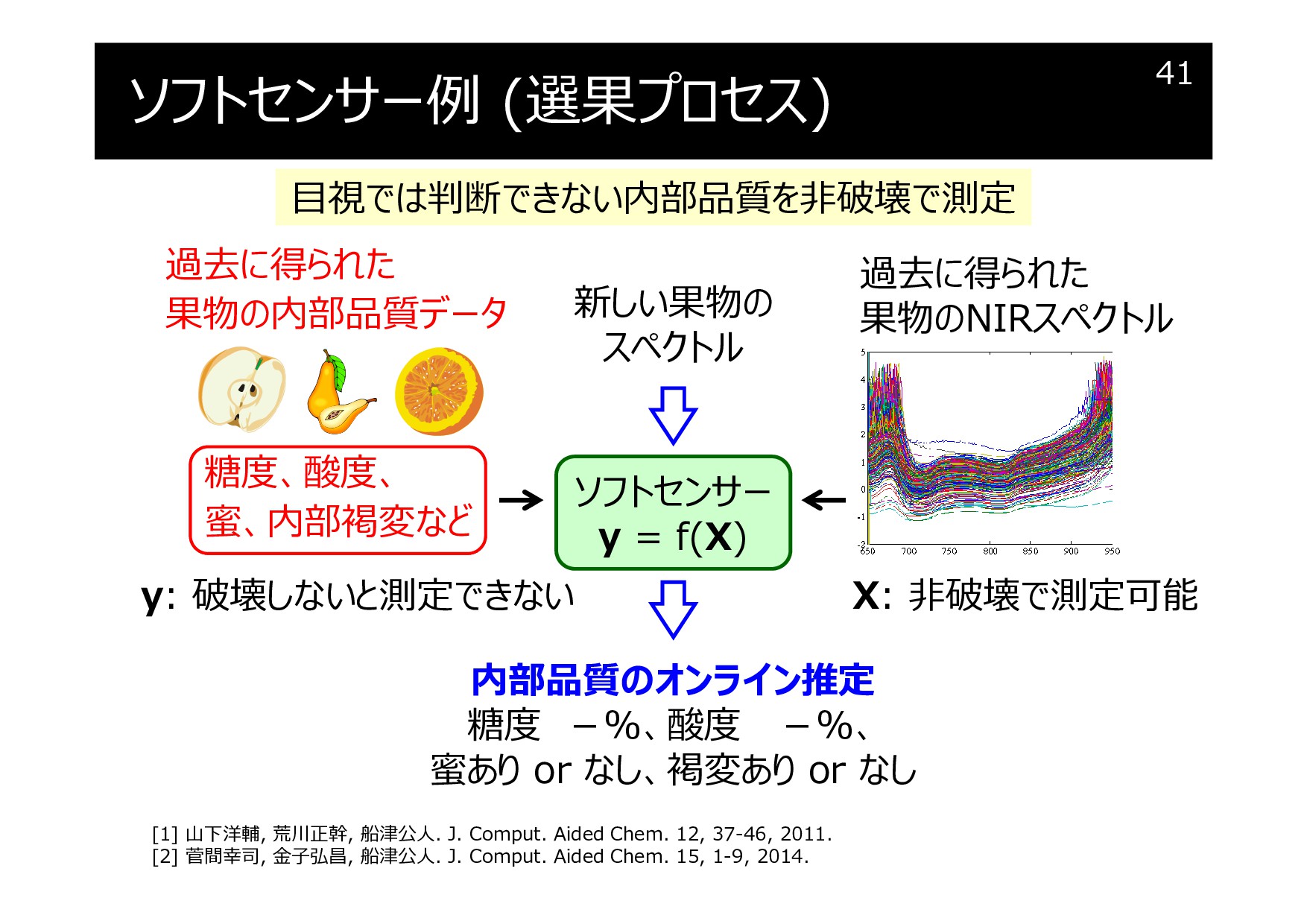
ソフトセンサー例 (選果プロセス)
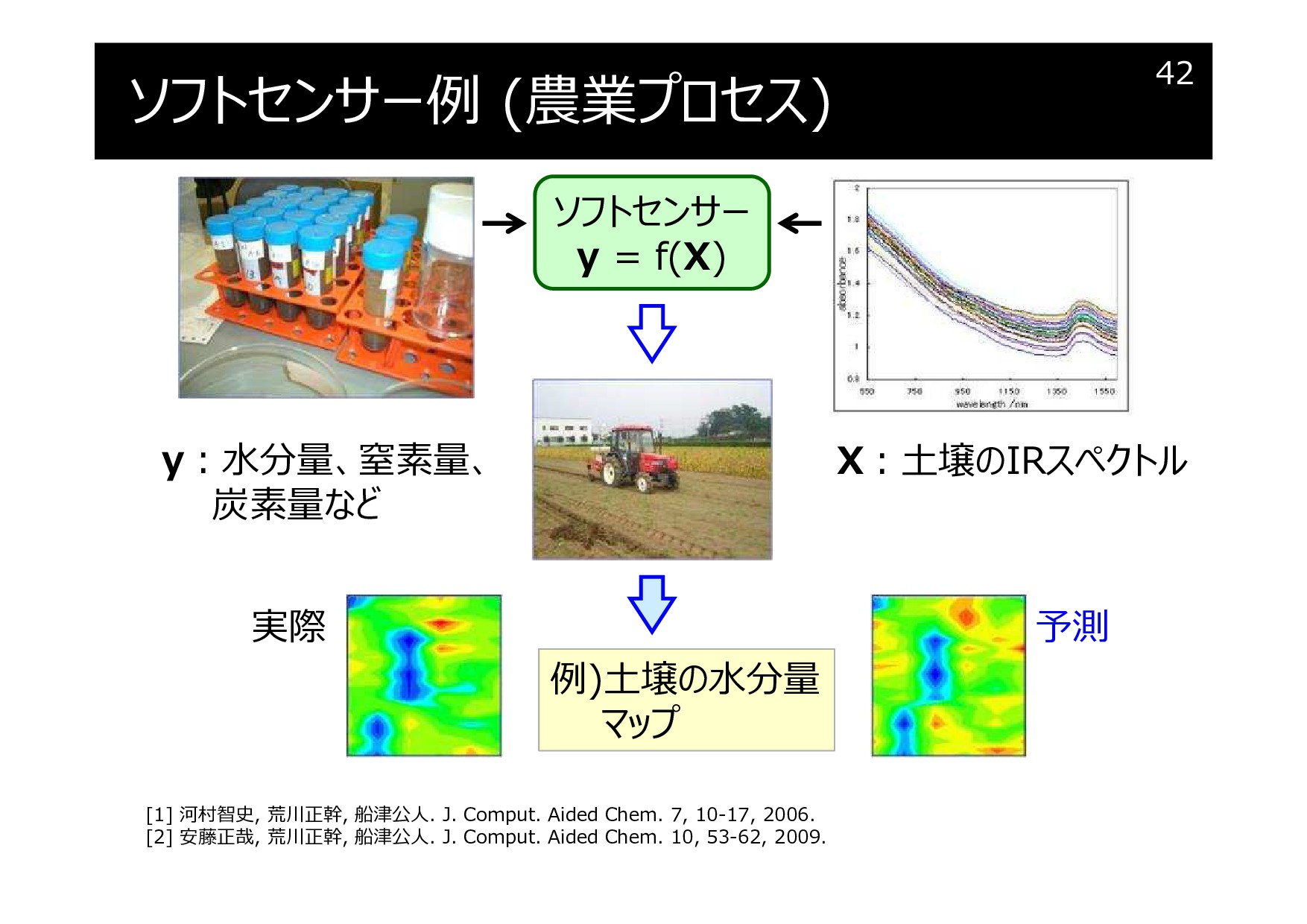
ソフトセンサー例 (農業プロセス)
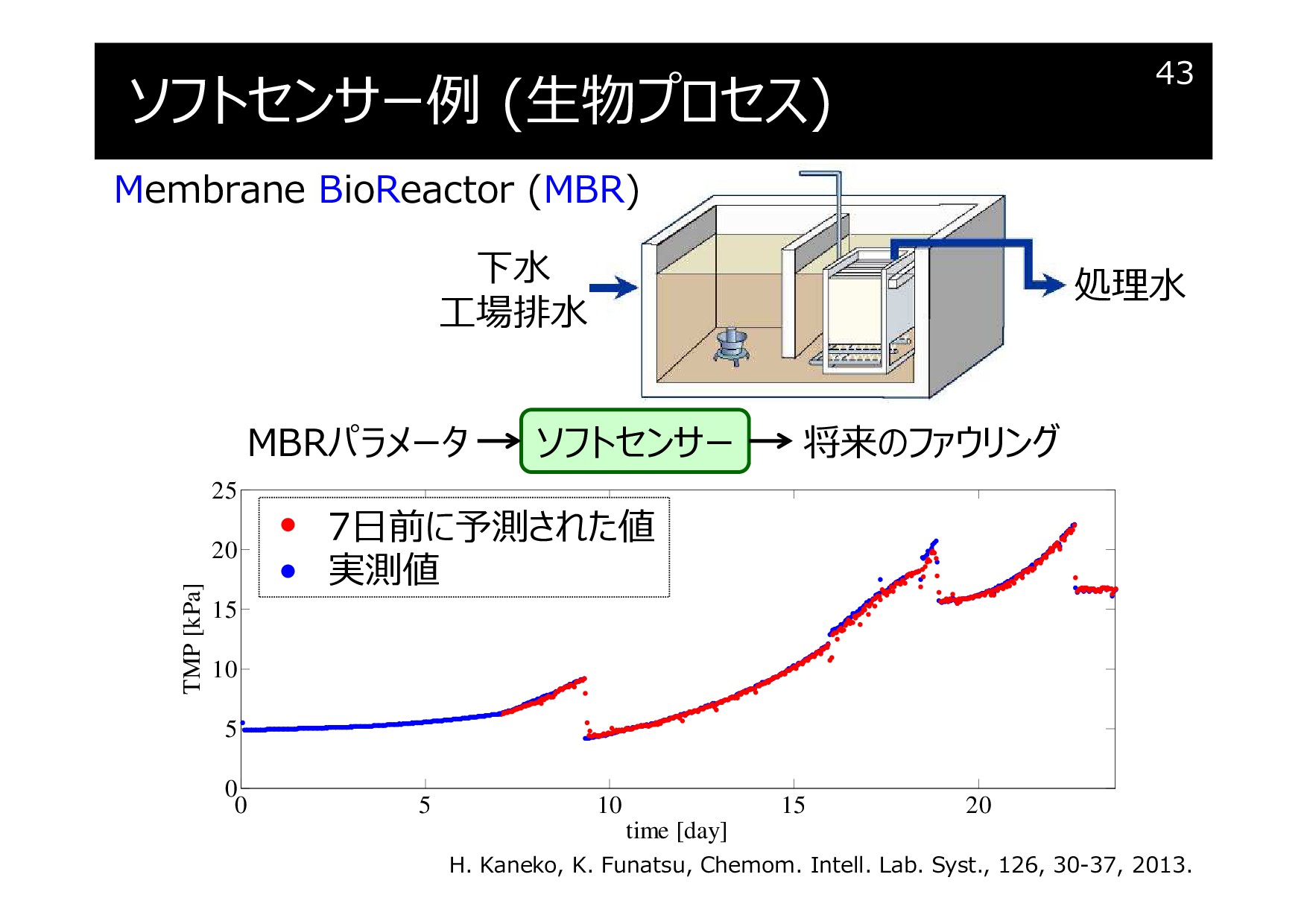
ソフトセンサー例 (生物プロセス)
化学プロセスにおけるソフトセンサー
ソフトセンサーの役割 1/4
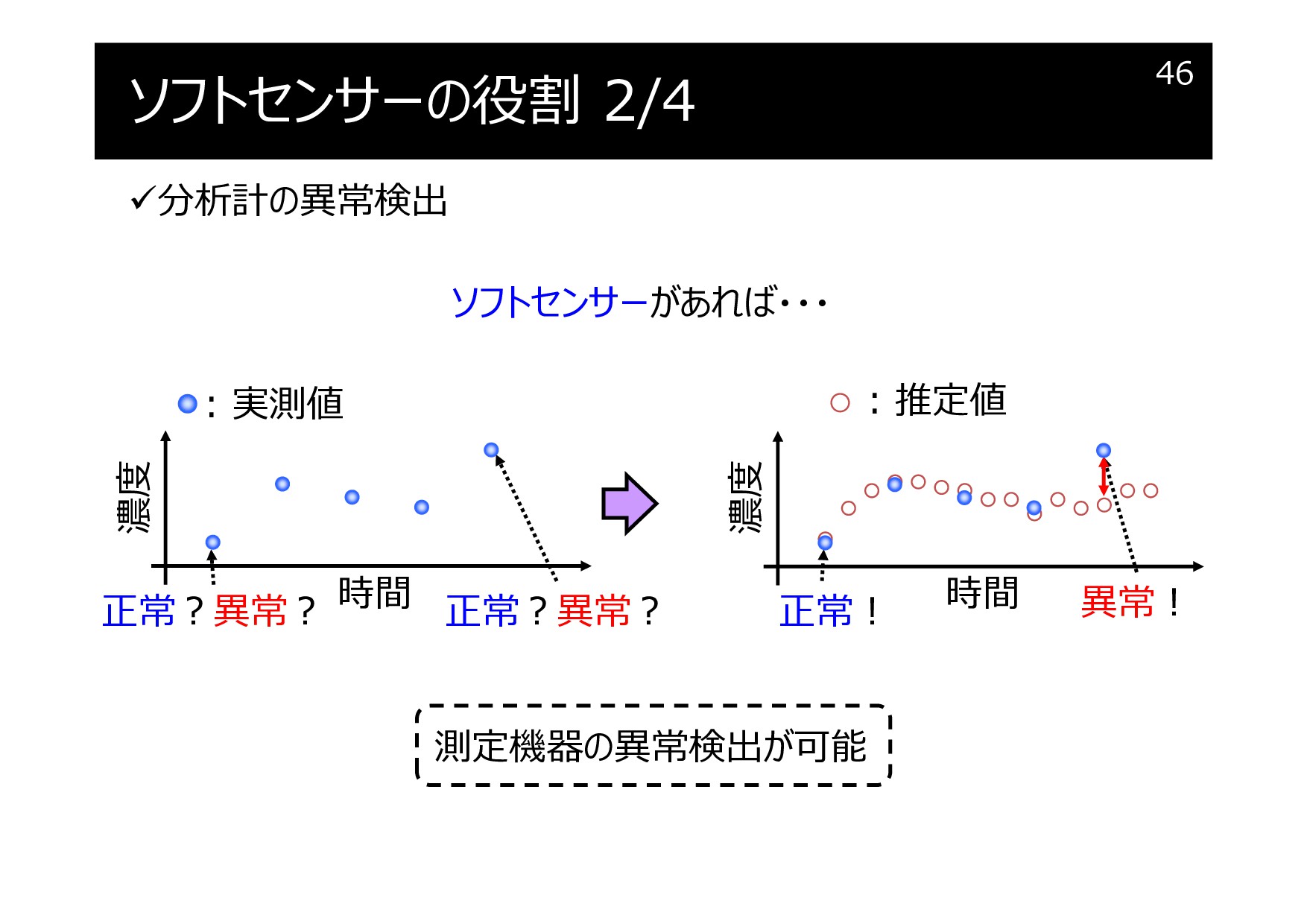
ソフトセンサーの役割 2/4
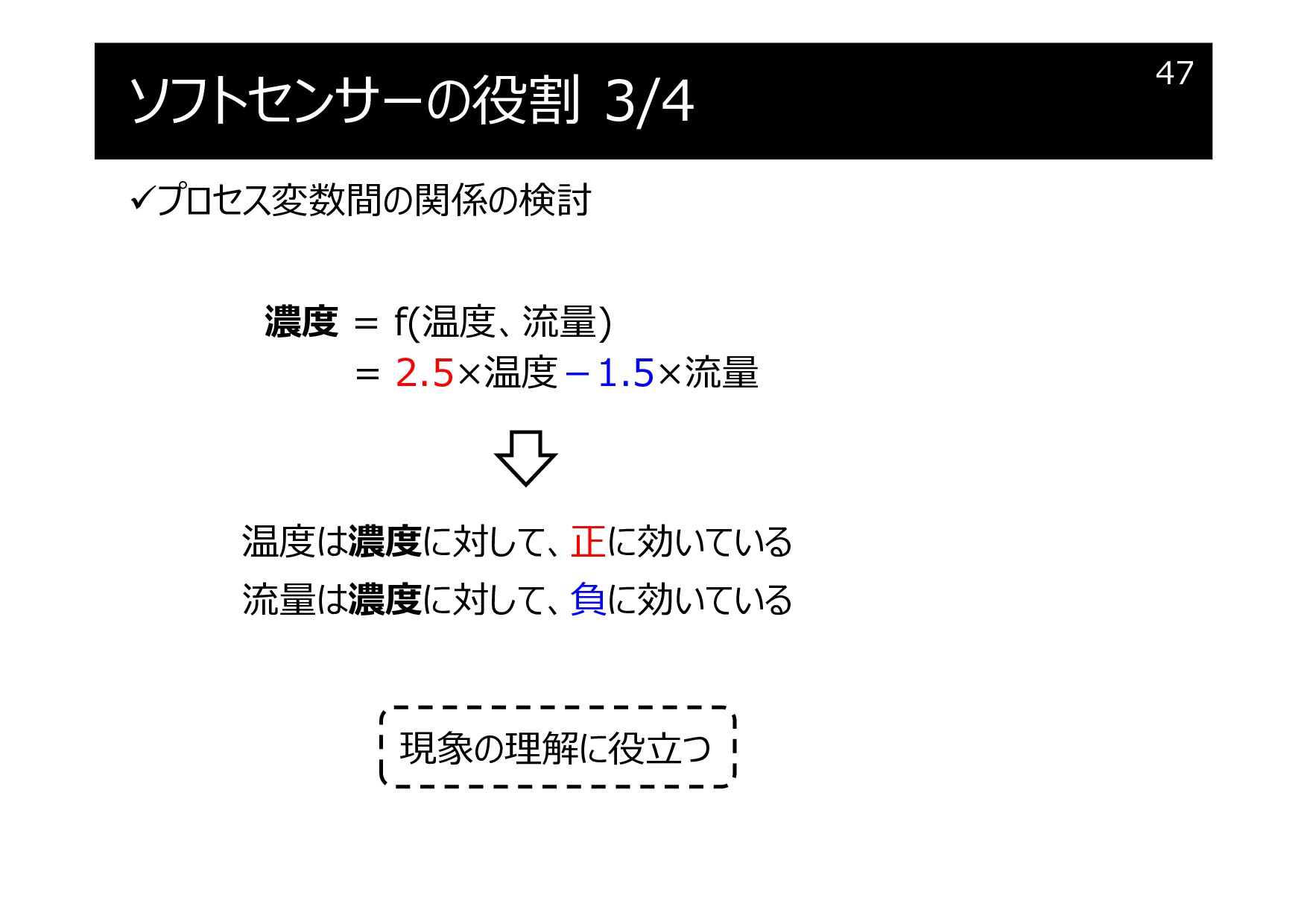
ソフトセンサーの役割 3/4
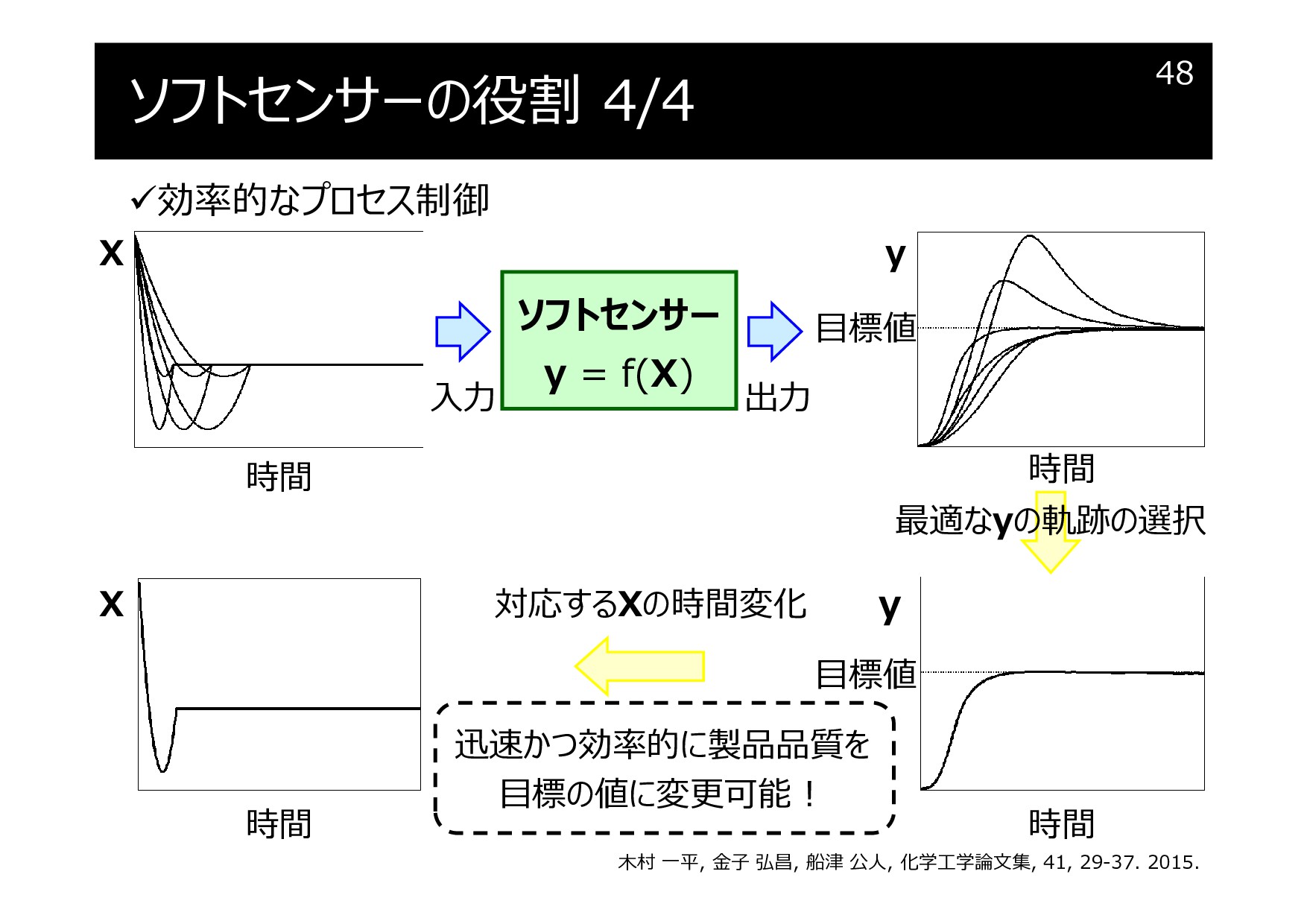
ソフトセンサーの役割 4/4
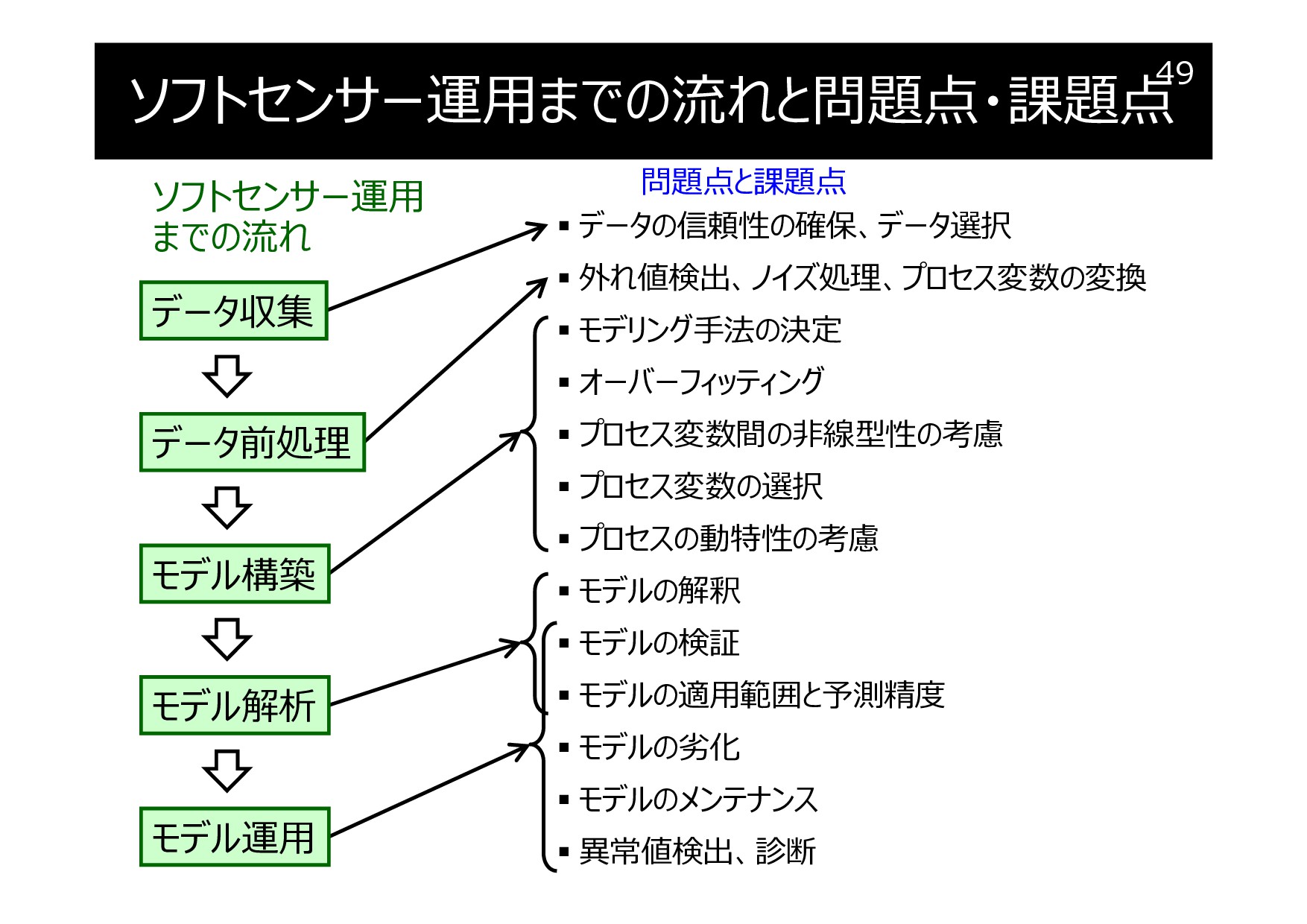
ソフトセンサー運用までの流れと問題点・課題点
ソフトセンサー(人工知能)の研究の例
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![プロセス変数の時間プロットの一例 17 時間 [分] 時間 [分] F1 F2 F3 L1](https://files.speakerdeck.com/presentations/2345b8cf580f46778d958dc9cd1ed5b7/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![ソフトセンサー例 イソプロパノール製造プロセス 脱ブタン蒸留塔 33 [1] H. Kaneko, K. Funatsu, AIChE](https://files.speakerdeck.com/presentations/2345b8cf580f46778d958dc9cd1ed5b7/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}