Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Azure Kinect DK Overview
Search
HoloLab
May 30, 2019
Technology
15k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Azure Kinect DK Overview
2019/5/29開催 de:code 2019 CM85 「Azure Kinect DK Overview」のスライドです
HoloLab
May 30, 2019
More Decks by HoloLab
See All by HoloLab
2021年のふりかえり / hololab-2021
hololab
1
1.9k
日本建築学会 情報シンポ2021 / AIJISA 2021
hololab
1
290
AR/VR/MRと3次元/BIMの取り組みご紹介 / SPAR2021
hololab
0
290
HoloLensで変わる行動のカタチ / Tech-on MeetUp Online 7
hololab
0
770
XR Kaigi 2021 ホロラボでのHoloLens 2アプリ 開発事例紹介 / XR Kaigi 2021
hololab
0
2.5k
HoloLensコミュニティ HoloMagiciansのご紹介 / DevRel Japan CONFERENCE
hololab
0
150
Azure Remote Renderingを活用した mixpace Remote Renderingのご紹介 / msdd2021 mrr
hololab
0
2k
第8回 全日本コンピュータビジョン勉強会 / Japan CV
hololab
0
1.2k
リモートワークの課題をモブワークで解決する試み / Scrum Fest Osaka
hololab
1
2.7k
Other Decks in Technology
See All in Technology
SRE本の知られざる名シーン / The Hidden Gems of Google SRE Book
nari_ex
1
420
AIと共生する開発者プラットフォーム:バクラクのモノレポ×マイクロサービス基盤
sakajunquality
2
3.7k
世界、断片、モデル。そして理解
ardbeg1958
1
130
誤解だらけの開発生産性 / Myths and Misconceptions about Developer Productivity
i35_267
2
780
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
210
公式ドキュメントの歩き方etc
coco_se
1
120
Oracle Exadata Database Service on Cloud@Customer X11M (ExaDB-C@C) サービス概要
oracle4engineer
PRO
2
8.4k
ガバナンスの「ちょうどいい落とし所」を探れ!開発スピードを妨げない運用判断の勘所 / SRE NEXT 2026
genda
1
230
SRE依存からの脱却 運用を開 発チームへ移す、 フルサイ クル開 発体制の実践
joooee0000
0
3.1k
タスクの複雑さでモデルを選ぶ ── Thompson Samplingで動かす“トークン/コスト最適化
satohy0323
0
550
2年前に削除したPHPクラスが、 ある日突然決済をエラーにした
ykagano
1
260
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
170
Featured
See All Featured
Designing for Performance
lara
611
70k
Public Speaking Without Barfing On Your Shoes - THAT 2023
reverentgeek
1
460
Producing Creativity
orderedlist
PRO
348
40k
Color Theory Basics | Prateek | Gurzu
gurzu
0
390
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
390
Navigating Team Friction
lara
192
16k
Optimising Largest Contentful Paint
csswizardry
37
3.8k
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
実際に使うSQLの書き方 徹底解説 / pgcon21j-tutorial
soudai
PRO
201
75k
The Pragmatic Product Professional
lauravandoore
37
7.4k
Become a Pro
speakerdeck
PRO
31
6k
Music & Morning Musume
bryan
47
7.3k
Transcript
de:code 2019 Azure Kinect DK Overview CM85 中村 薫 株式会社ホロラボ
代表取締役 CEO
会社紹介 株式会社ホロラボ 事業内容 HoloLensやWindows MRなどxR技術やセンサー技術に関する ・システム/アプリケーションの企画開発 ・調査研究 ・普及啓発活動 設立 2017/01/18
住所 東京都品川区西五反田2-25-1 インテックス五反田ビル3F 資本金 30,000,000円 取締役 5名 従業員 16名 Web https://hololab.co.jp/
自己紹介 2011年 2012年 2012年 2015年
注意
2019/5/2~3 MR Dev Days@Redmond
Azure Kinect DK
https://azure.microsoft.com/en-us/services/kinect-dk/
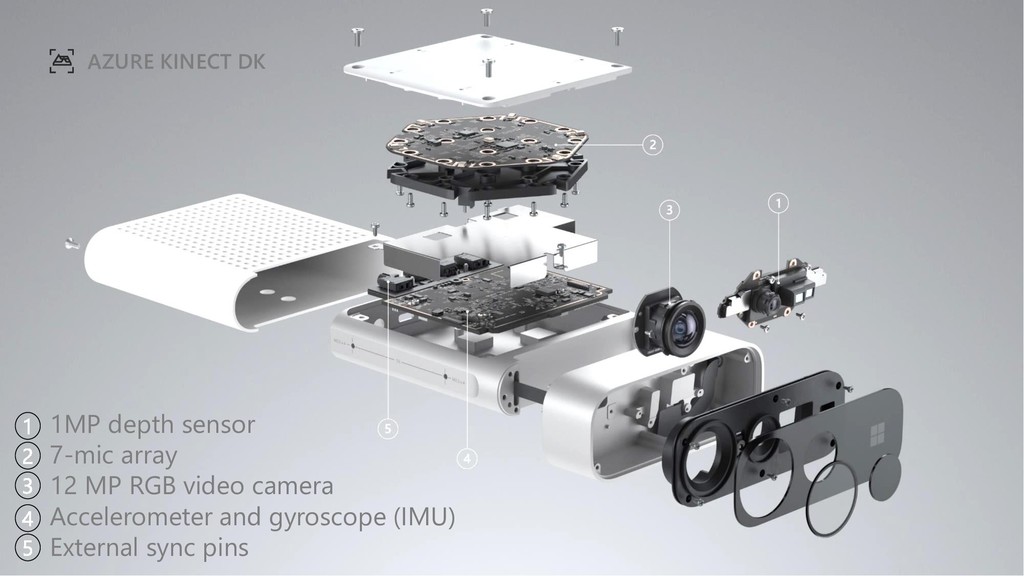
1MP depth sensor 7-mic array 12 MP RGB video camera
Accelerometer and gyroscope (IMU) External sync pins AZURE KINECT DK
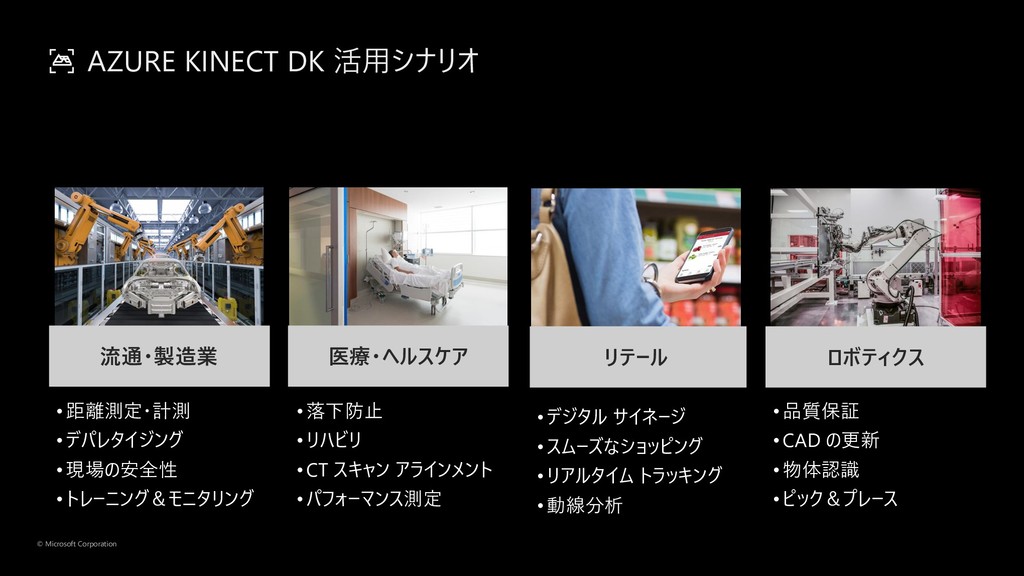
© Microsoft Corporation 流通・製造業 医療・ヘルスケア リテール ロボティクス AZURE KINECT DK
活用シナリオ • 距離測定・計測 • デパレタイジング • 現場の安全性 • トレーニング&モニタリング • 落下防止 • リハビリ • CT スキャン アラインメント • パフォーマンス測定 • デジタル サイネージ • スムーズなショッピング • リアルタイム トラッキング • 動線分析 • 品質保証 • CAD の更新 • 物体認識 • ピック&プレース
概要
None
None
ソフトウェア
SDK
https://github.com/microsoft/Azure-Kinect-Sensor-SDK センサーSDK(概要)
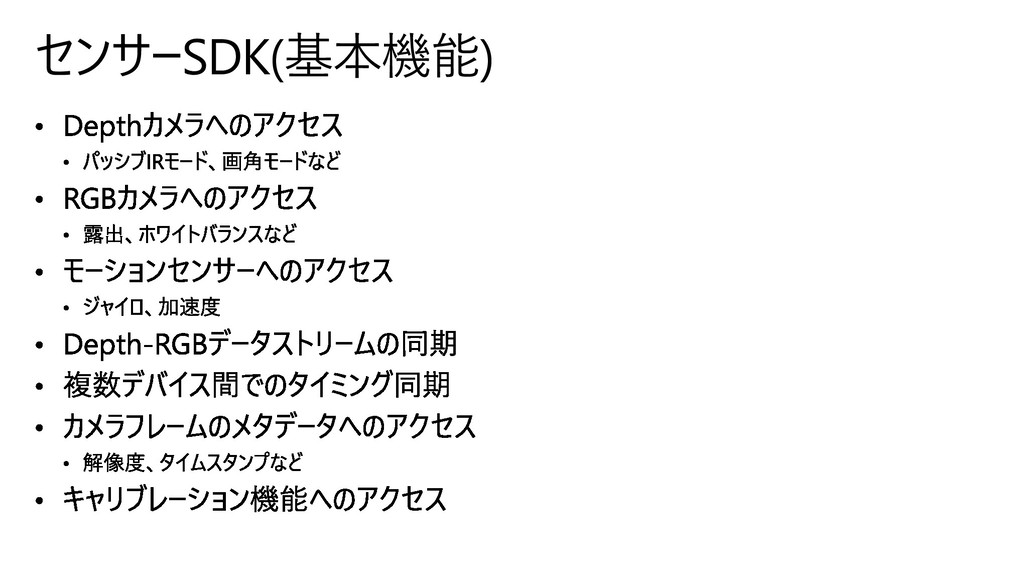
センサーSDK(基本機能)
C言語(自作C++ラッパー + OpenCV + PCL)
C#(WPF)
ボディトラッキングSDK(概要)
ボディトラッキングSDK(基本機能)
Azure Cognitive Services(概要)
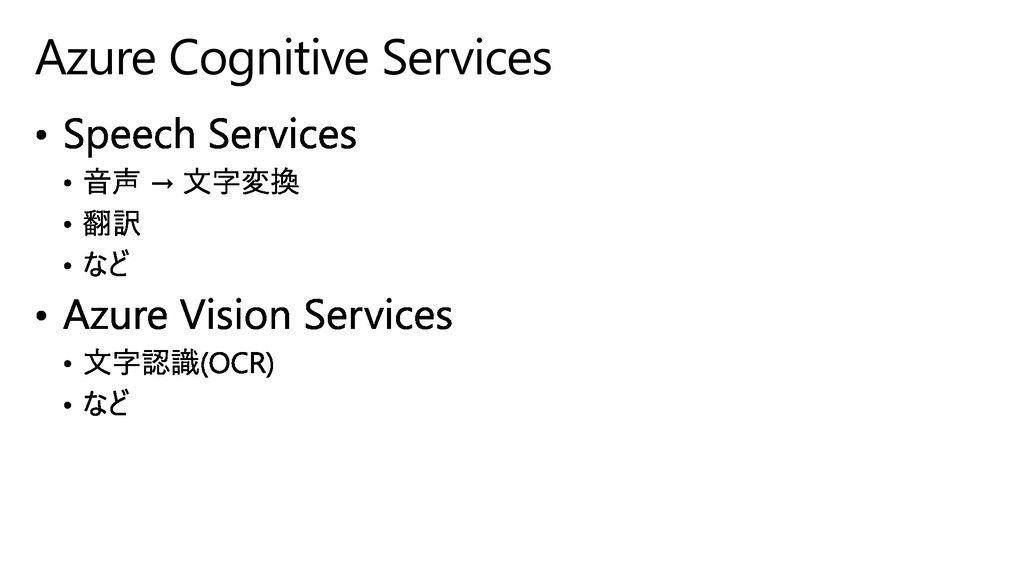
Azure Cognitive Services
ハードウェア
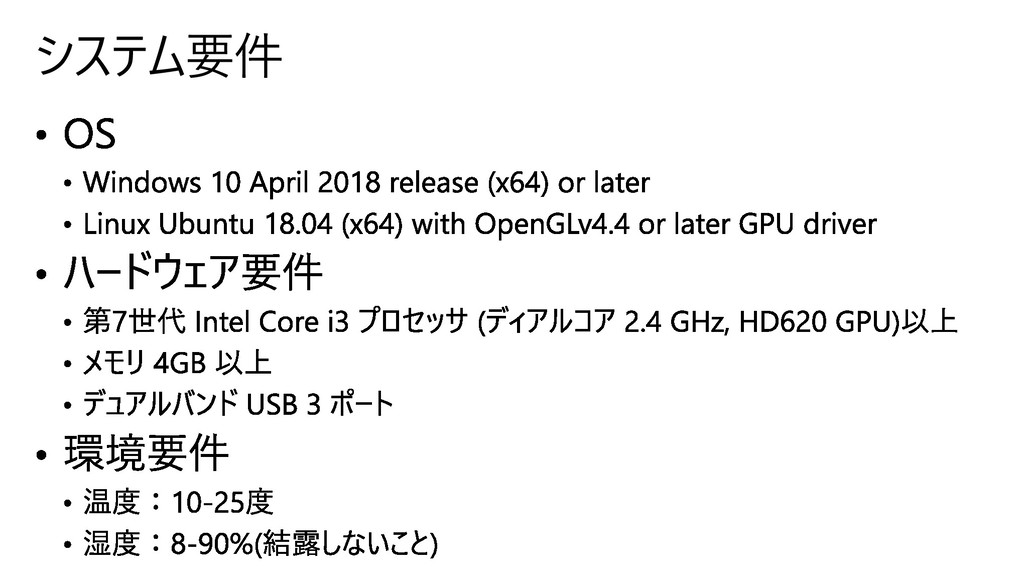
システム要件
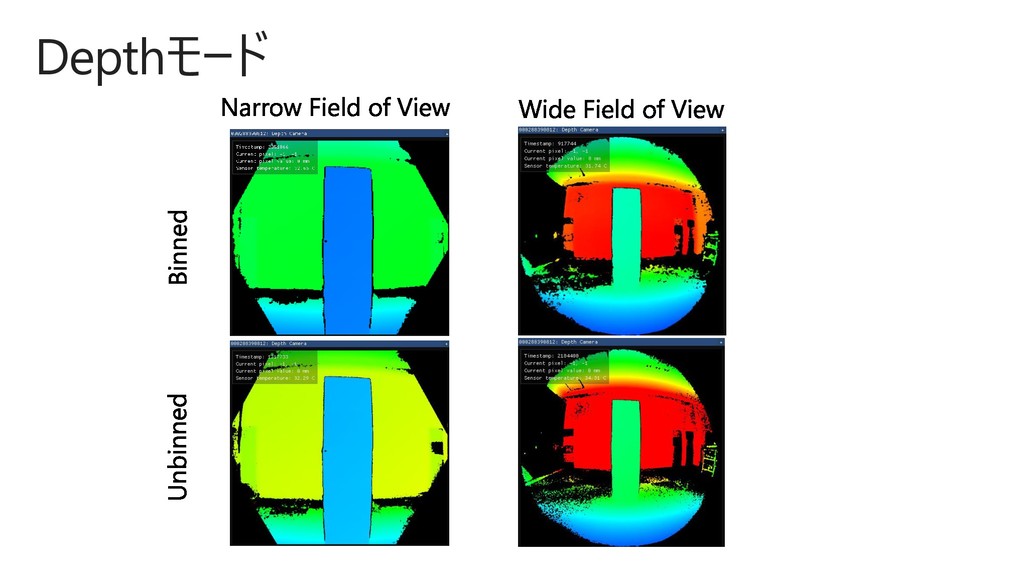
Depthモード モード 解像度 FOI FPS 有効距離 露光時間 NFOV unbinned 640x576
75°x 65° 0, 5, 15, 30 0.5 - 3.86 m 12.8 ms NFOV 2x2 binned (SW) 320x288 75°x 65° 0, 5, 15, 30 0.5 - 5.46 m 12.8 ms WFOV 2x2 binned 512x512 120°x 120° 0, 5, 15, 30 0.25 - 2.88 m 12.8 ms WFOV unbinned 1024x1024 120°x 120° 0, 5, 15 0.25 - 2.21 m 20.3 ms Passive IR 1024x1024 N/A 0, 5, 15, 30 N/A 1.6 ms FOI (Field of Illumination) → (IRの)投射角 FPS 0 → 静止画 Binned → 隣接する素子を組み合わせることで、解像度を犠牲に有効距離を上げる 参考 https://www.baslerweb.com/jp/sales-support/knowledge-base/frequently-asked-questions/what-is-binning/15191/ IR → Microsoft designed 1 Megapixel Time-of-Flight
Depthモード
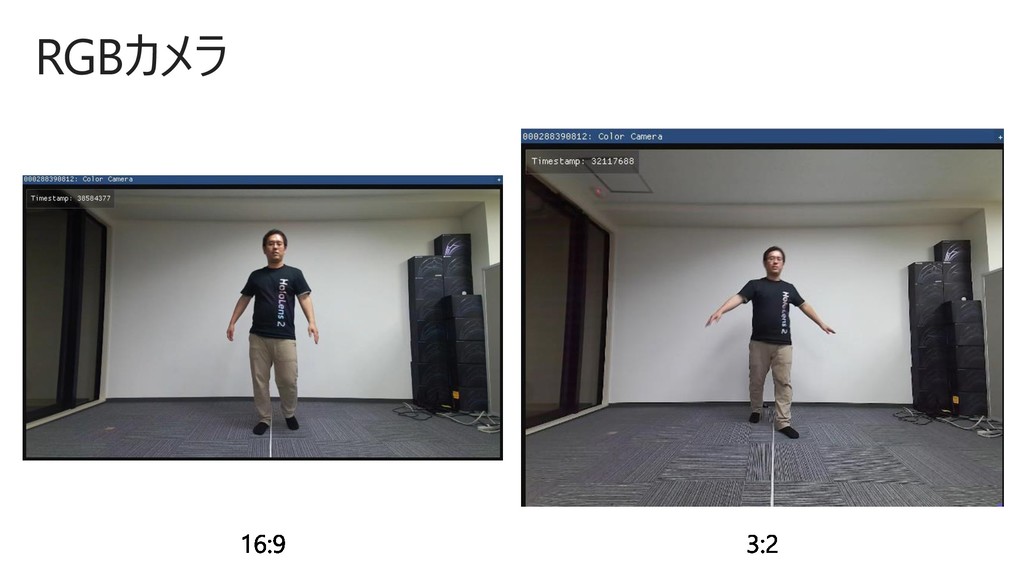
RGBカメラ RGBカメラ解像(H x V) アスペクト比 フォーマット FPS FOV(H x V)
3840x2160 16:9 MJPEG 0, 5, 15, 30 90x59 2560x1440 16:9 MJPEG 0, 5, 15, 30 90x59 1920x1080 16:9 MJPEG 0, 5, 15, 30 90x59 1280x720 16:9 MJPEG/YUY2/NV12 0, 5, 15, 30 90x59 4096x3072 4:3 MJPEG 0, 5, 15 90x74.3 2048x1536 4:3 MJPEG 0, 5, 15, 30 90x74.3 USB Video class対応
RGBカメラ
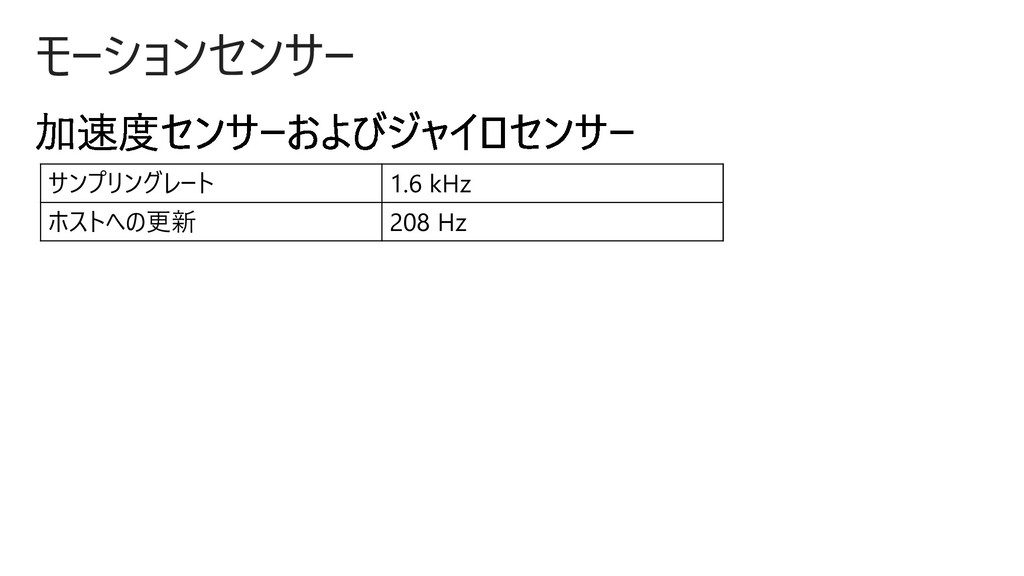
モーションセンサー サンプリングレート 1.6 kHz ホストへの更新 208 Hz
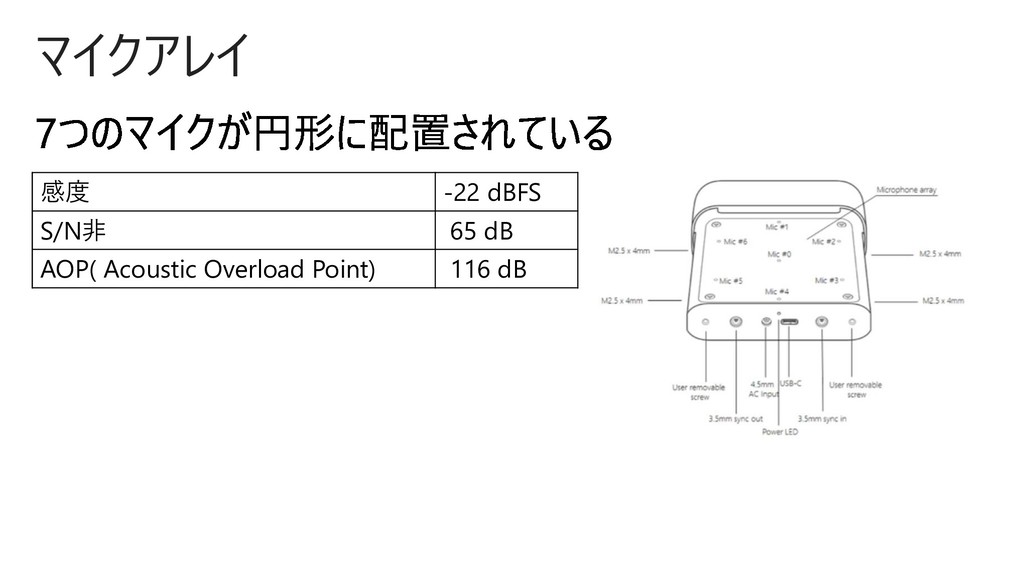
マイクアレイ 感度 -22 dBFS S/N非 65 dB AOP( Acoustic Overload
Point) 116 dB
Azure Kinect DKと Kinect for Windows v2 の比較
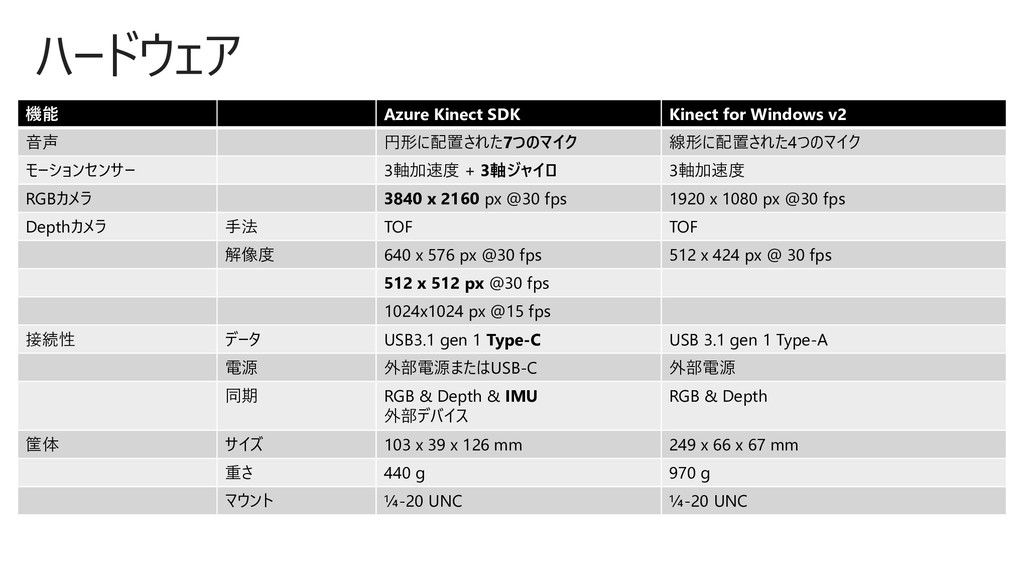
ハードウェア 機能 Azure Kinect SDK Kinect for Windows v2 音声
円形に配置された7つのマイク 線形に配置された4つのマイク モーションセンサー 3軸加速度 + 3軸ジャイロ 3軸加速度 RGBカメラ 3840 x 2160 px @30 fps 1920 x 1080 px @30 fps Depthカメラ 手法 TOF TOF 解像度 640 x 576 px @30 fps 512 x 424 px @ 30 fps 512 x 512 px @30 fps 1024x1024 px @15 fps 接続性 データ USB3.1 gen 1 Type-C USB 3.1 gen 1 Type-A 電源 外部電源またはUSB-C 外部電源 同期 RGB & Depth & IMU 外部デバイス RGB & Depth 筐体 サイズ 103 x 39 x 126 mm 249 x 66 x 67 mm 重さ 440 g 970 g マウント ¼-20 UNC ¼-20 UNC
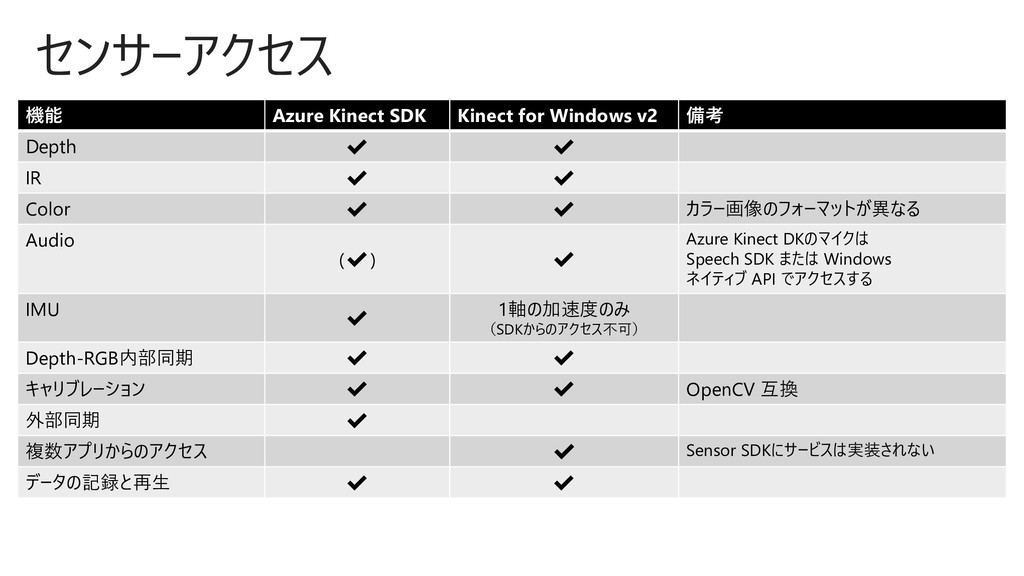
センサーアクセス 機能 Azure Kinect SDK Kinect for Windows v2 備考
Depth ✔ ✔ IR ✔ ✔ Color ✔ ✔ カラー画像のフォーマットが異なる Audio (✔) ✔ Azure Kinect DKのマイクは Speech SDK または Windows ネイティブ API でアクセスする IMU ✔ 1軸の加速度のみ (SDKからのアクセス不可) Depth-RGB内部同期 ✔ ✔ キャリブレーション ✔ ✔ OpenCV 互換 外部同期 ✔ 複数アプリからのアクセス ✔ Sensor SDKにサービスは実装されない データの記録と再生 ✔ ✔
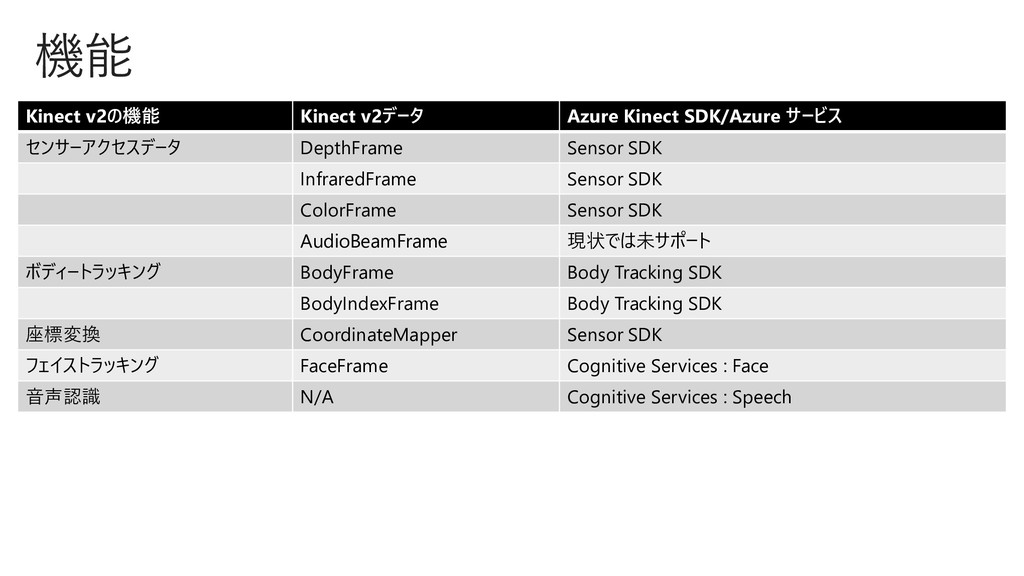
機能 Kinect v2の機能 Kinect v2データ Azure Kinect SDK/Azure サービス センサーアクセスデータ
DepthFrame Sensor SDK InfraredFrame Sensor SDK ColorFrame Sensor SDK AudioBeamFrame 現状では未サポート ボディートラッキング BodyFrame Body Tracking SDK BodyIndexFrame Body Tracking SDK 座標変換 CoordinateMapper Sensor SDK フェイストラッキング FaceFrame Cognitive Services : Face 音声認識 N/A Cognitive Services : Speech
© 2018 Microsoft Corporation. All rights reserved. 本情報の内容(添付文書、リンク先などを含む)は、作成日時点でのものであり、予告なく変更される場合があります。 © 2019
Microsoft Corporation. All rights reserved. 本情報の内容 (添付文書、リンク先などを含む) は、de:code 2019 開催日 (2019年5月29~30日) 時点のものであり、予告なく変更される場合があります。 本コンテンツの著作権、および本コンテンツ中に出てくる商標権、団体名、ロゴ、製品、サービスなどはそれぞれ、各権利保有者に帰属します。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}