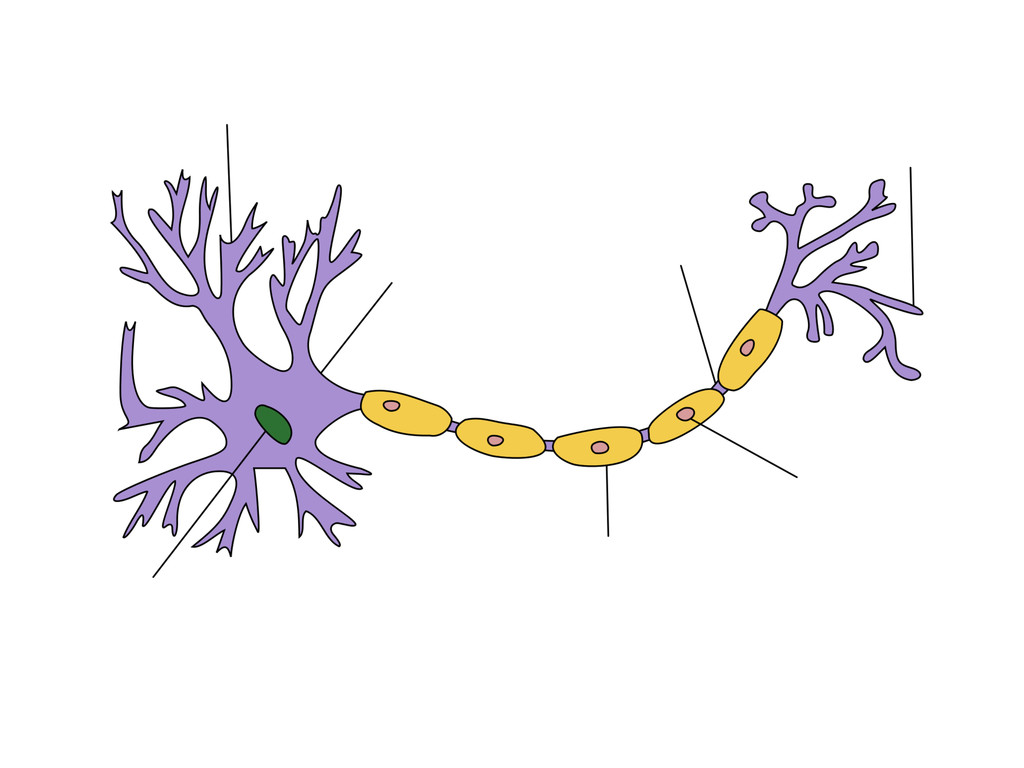
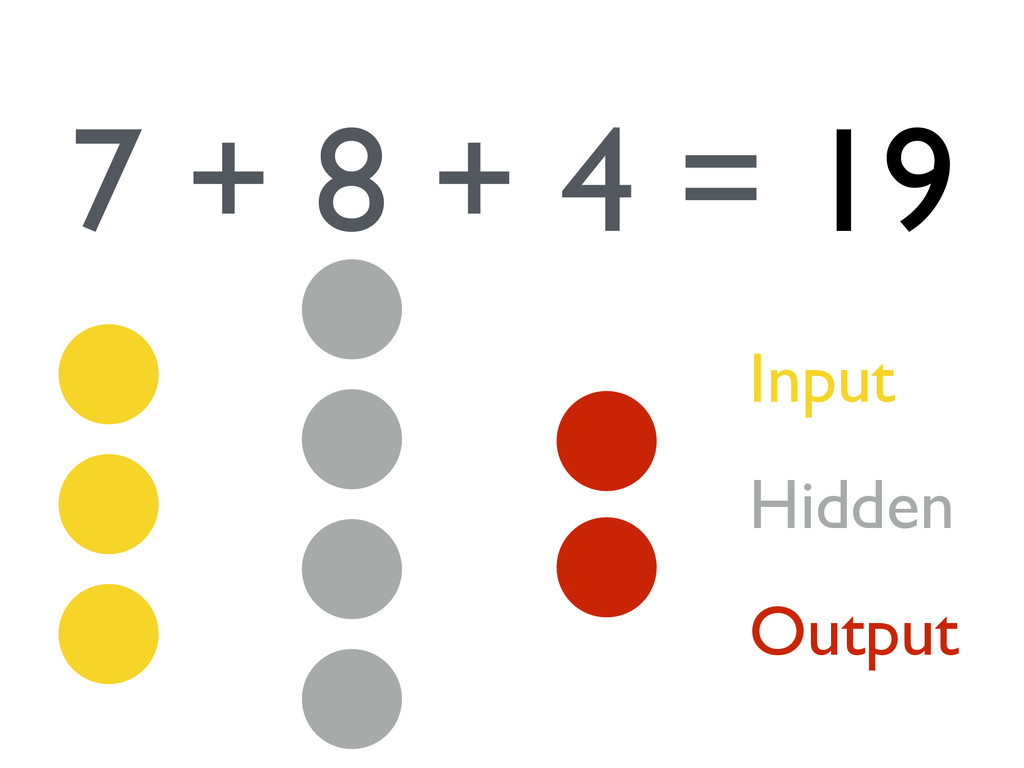
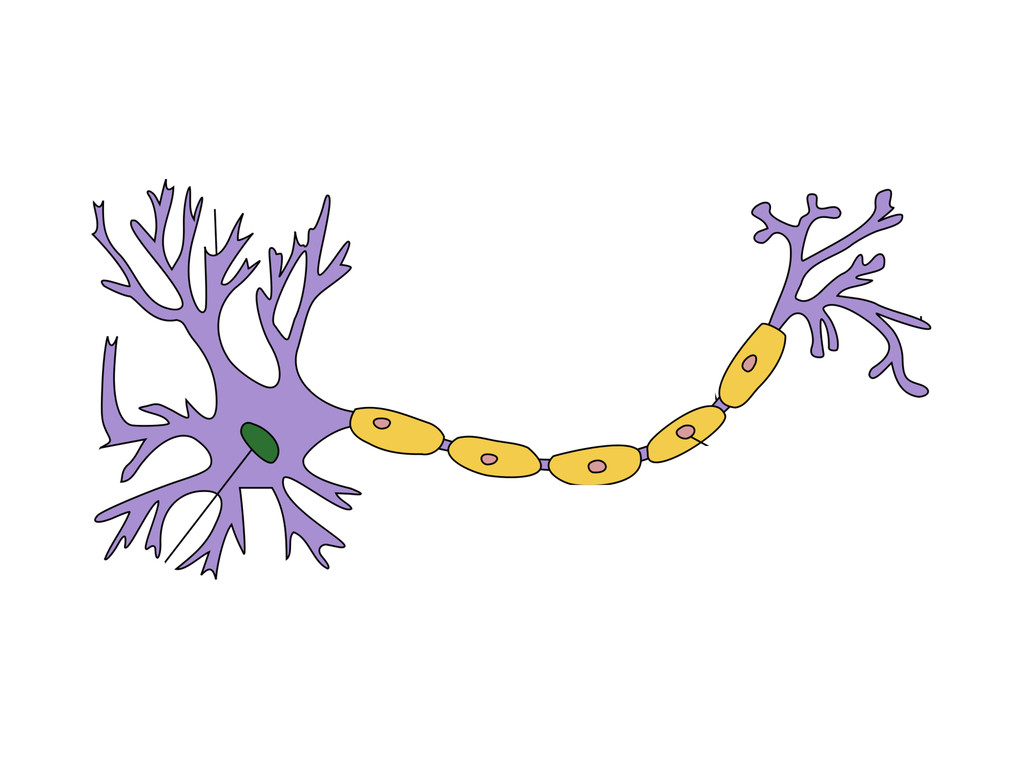
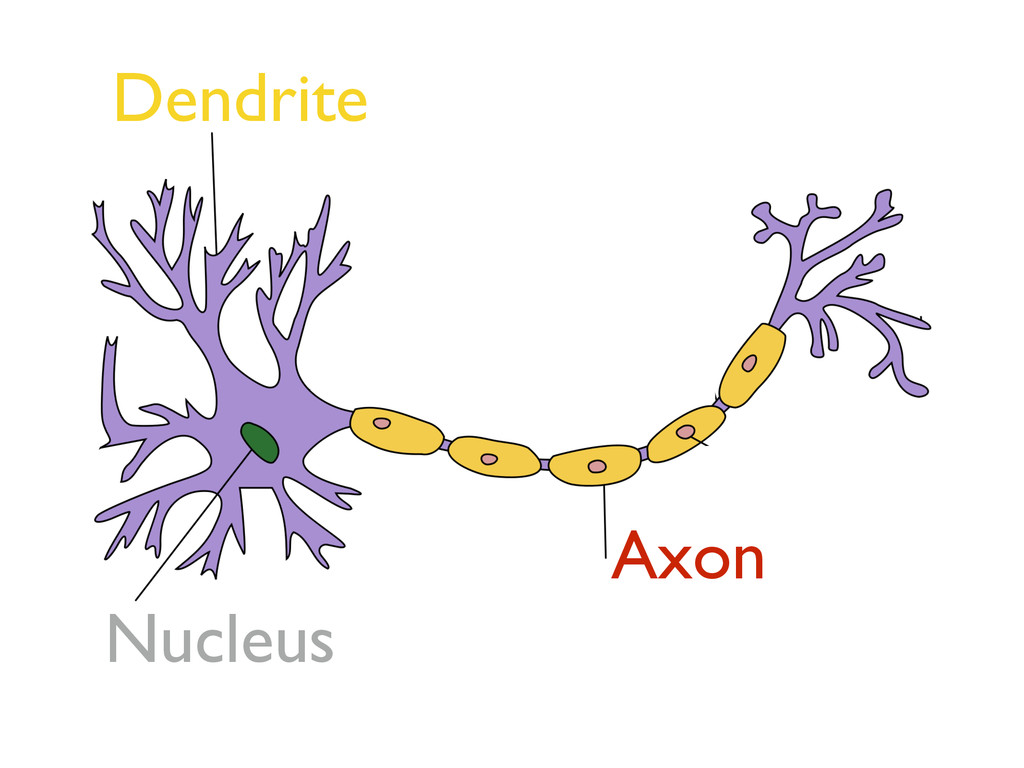
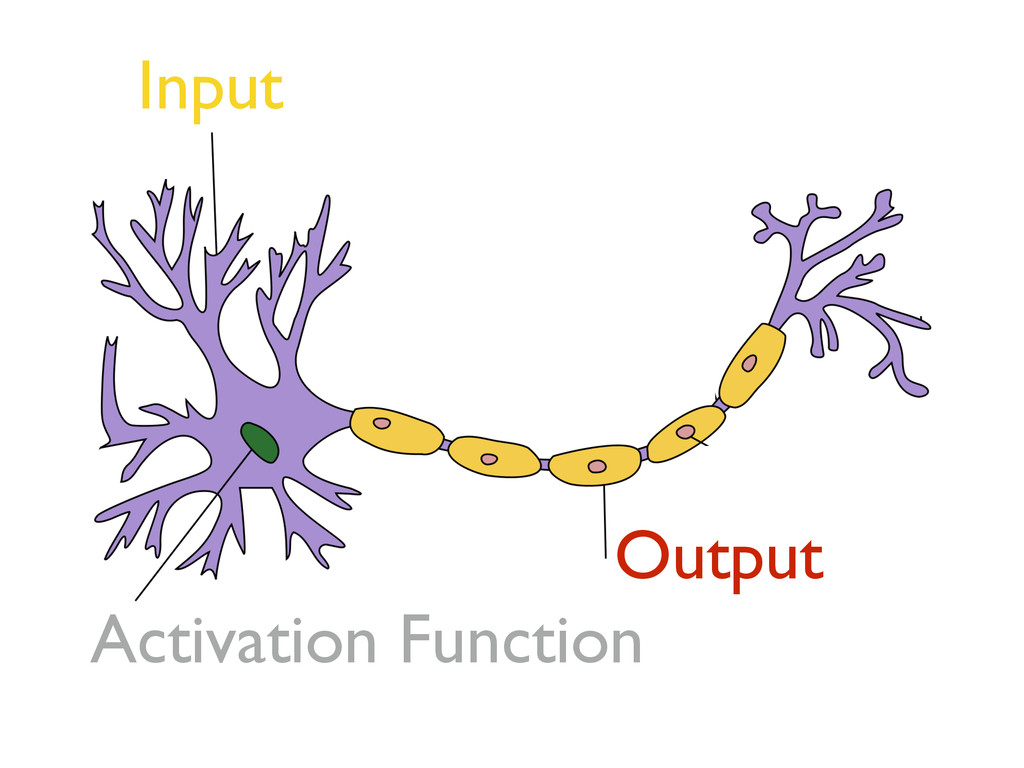
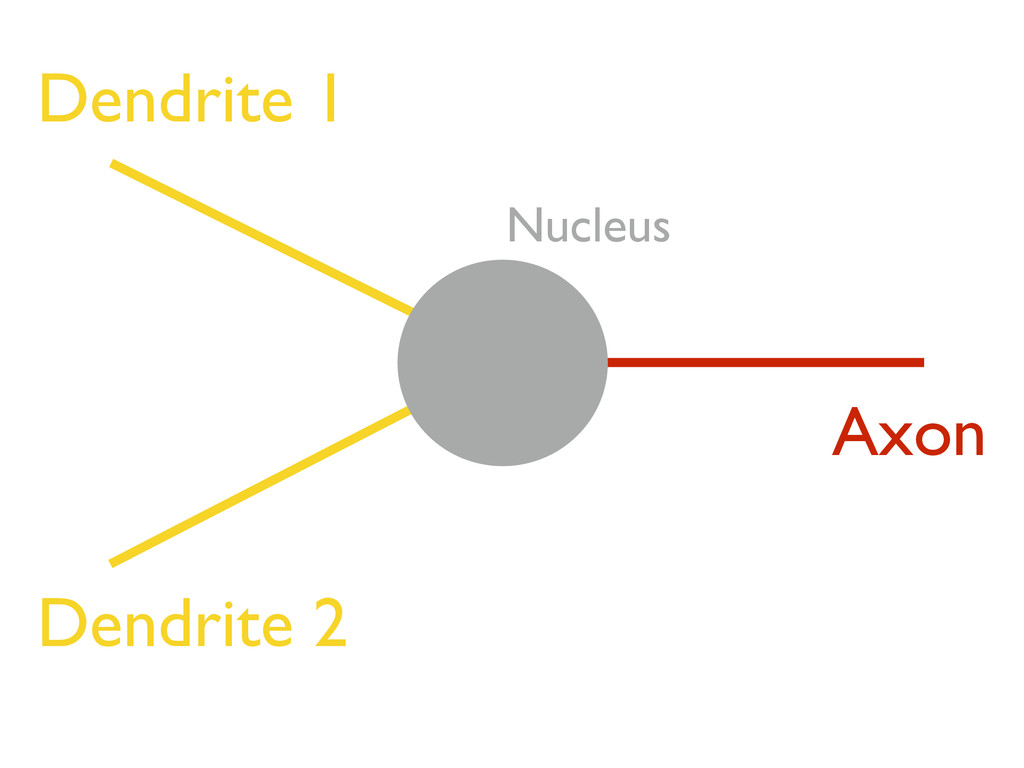
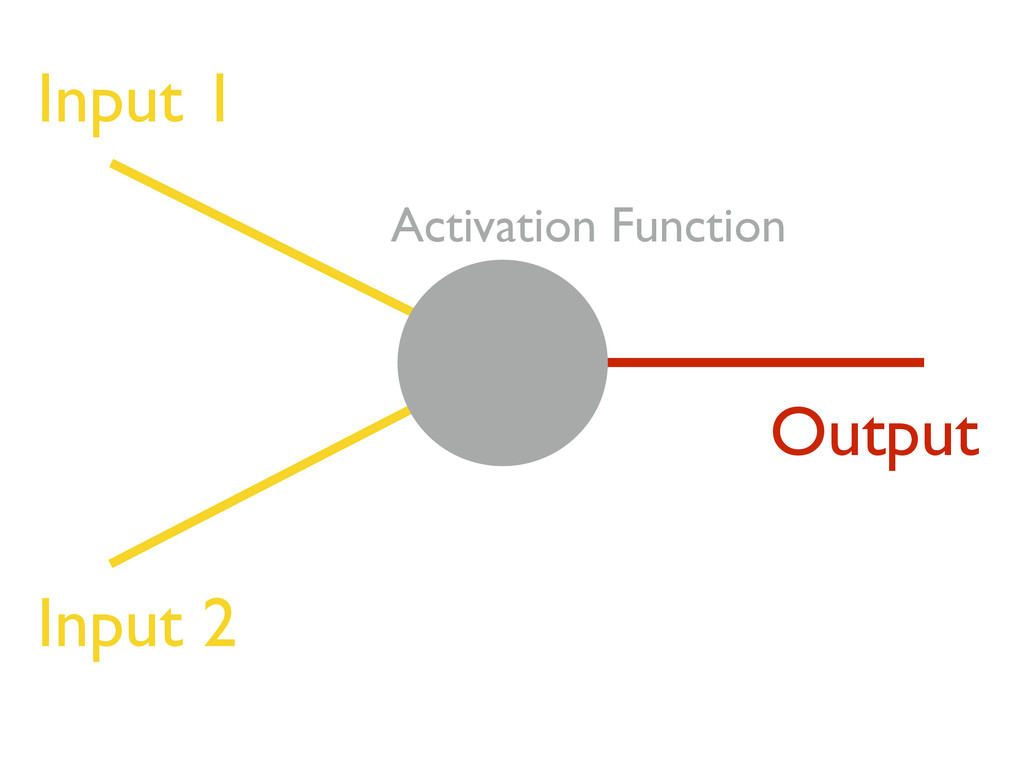
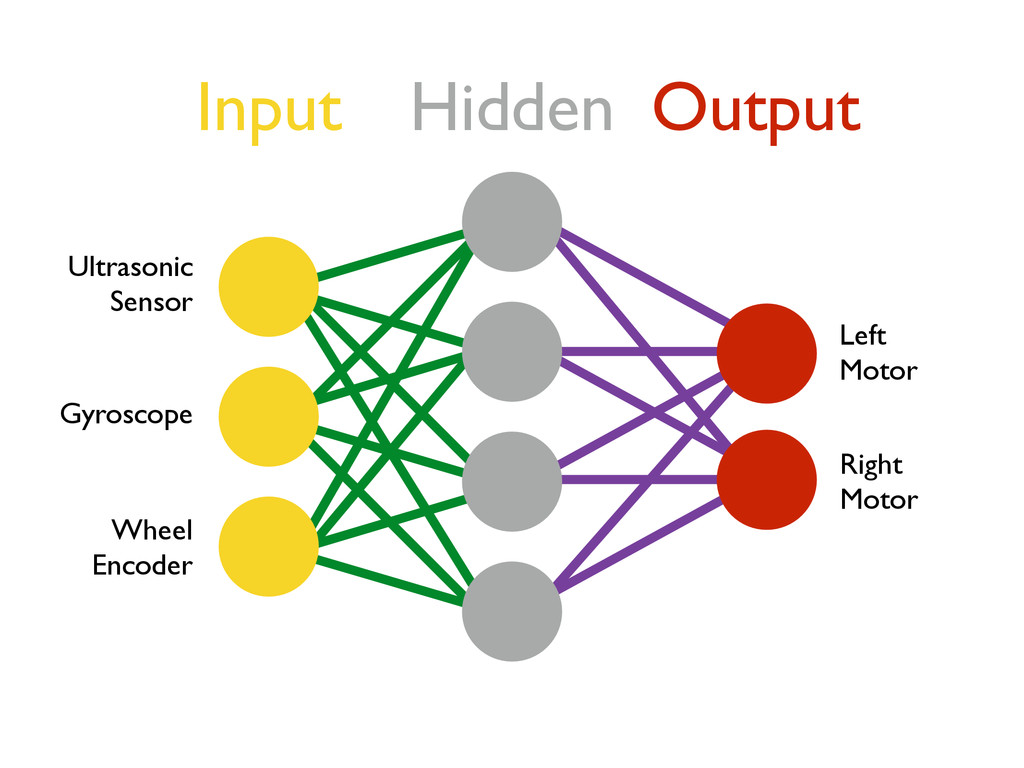
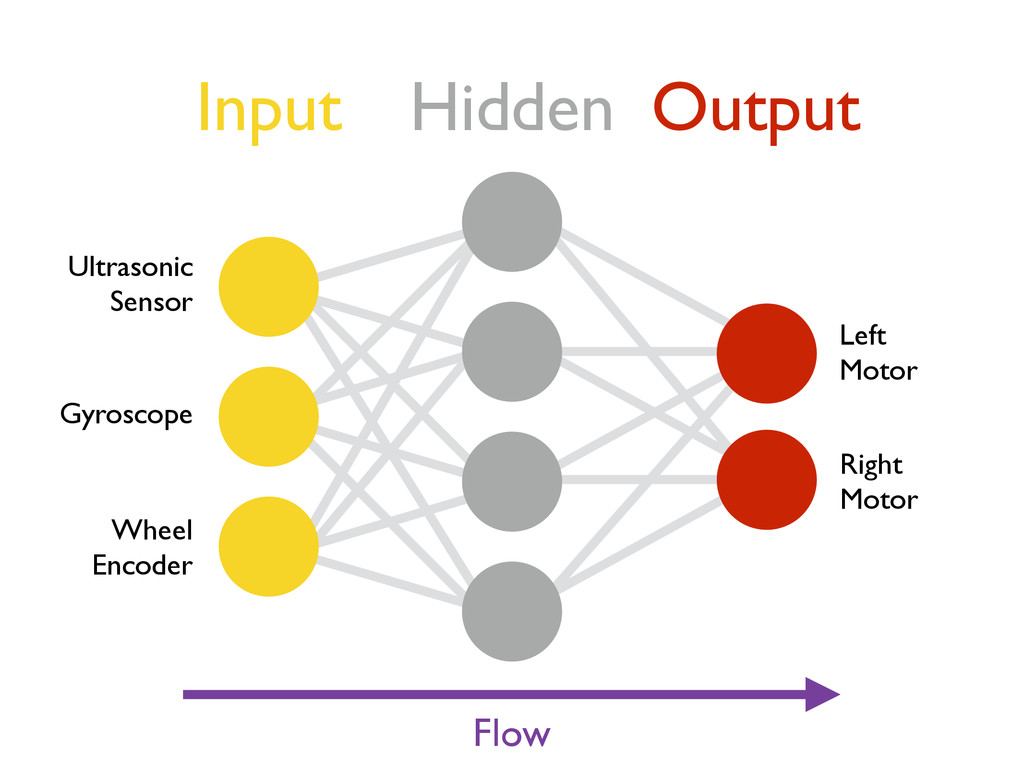
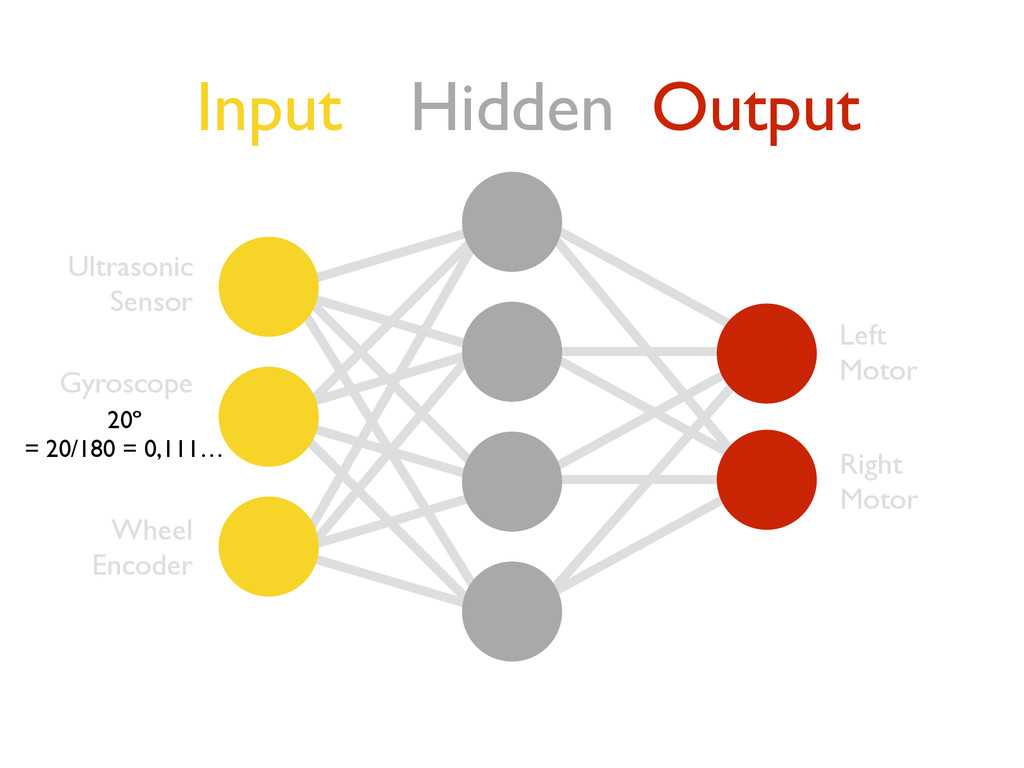
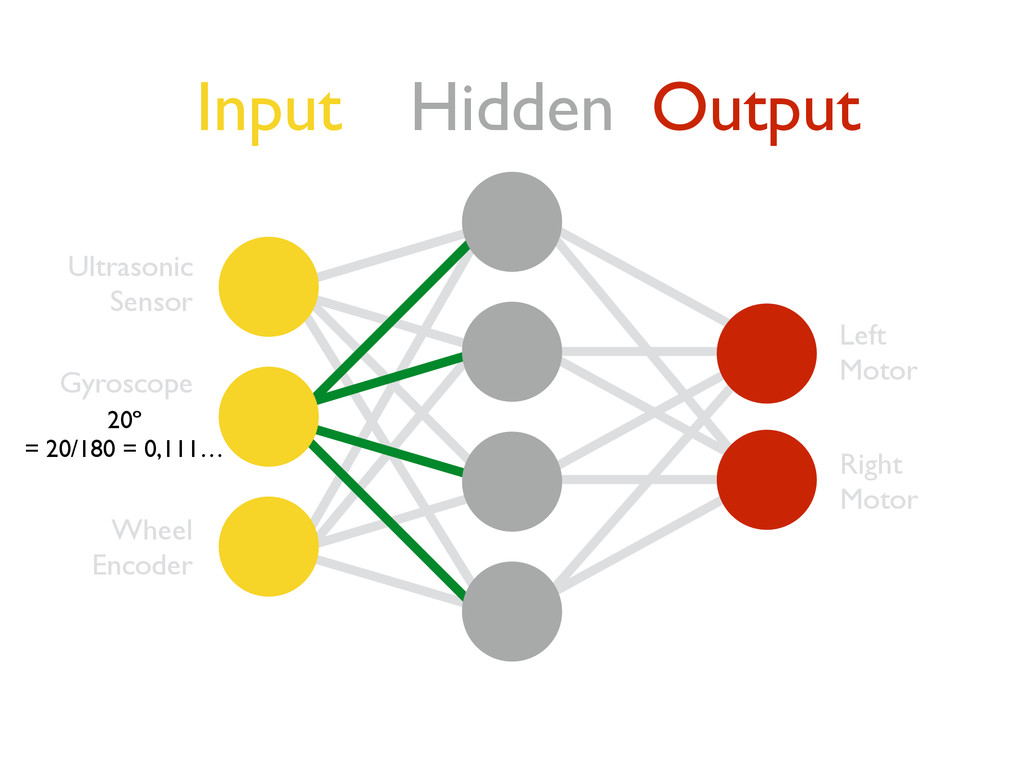
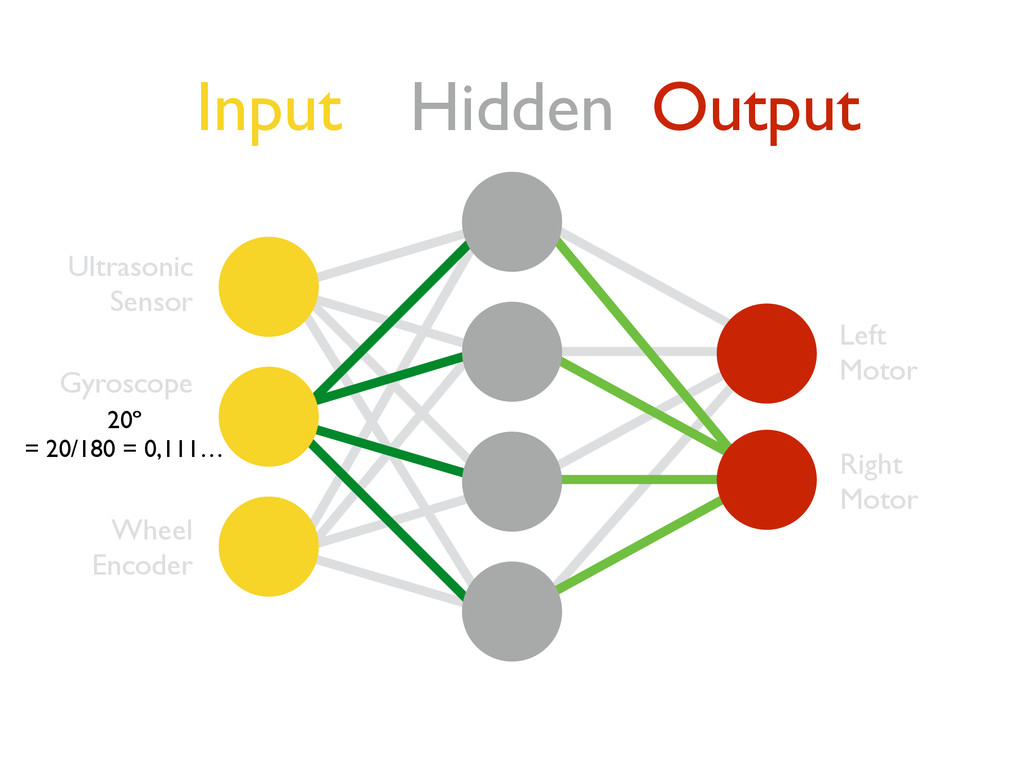
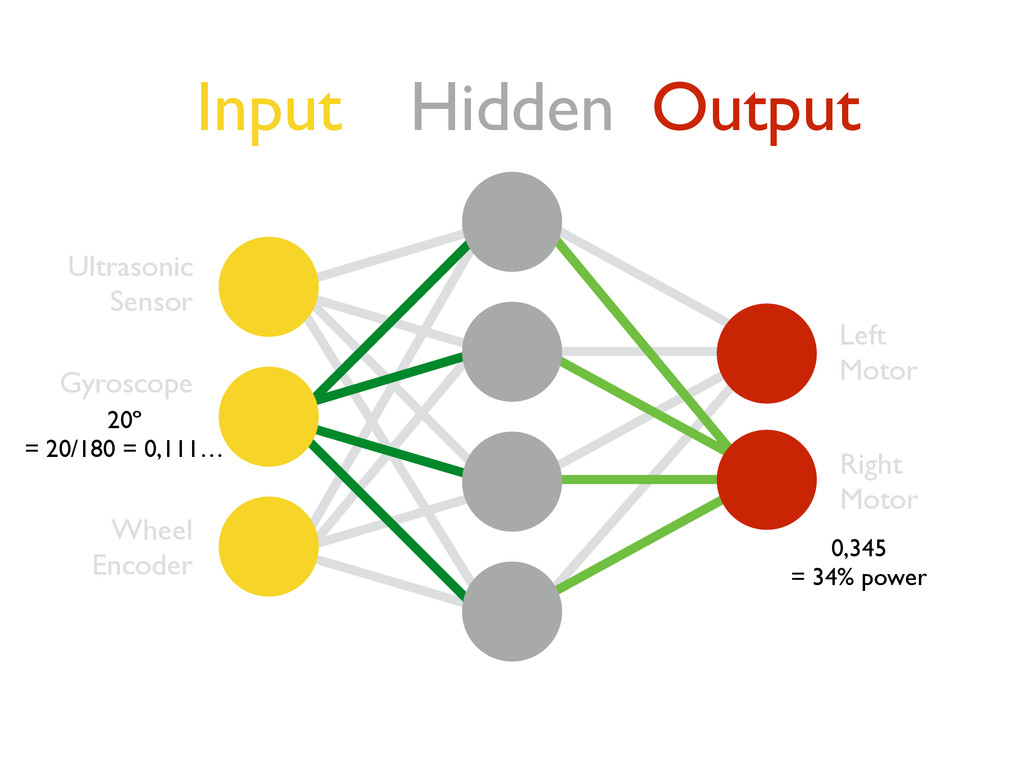
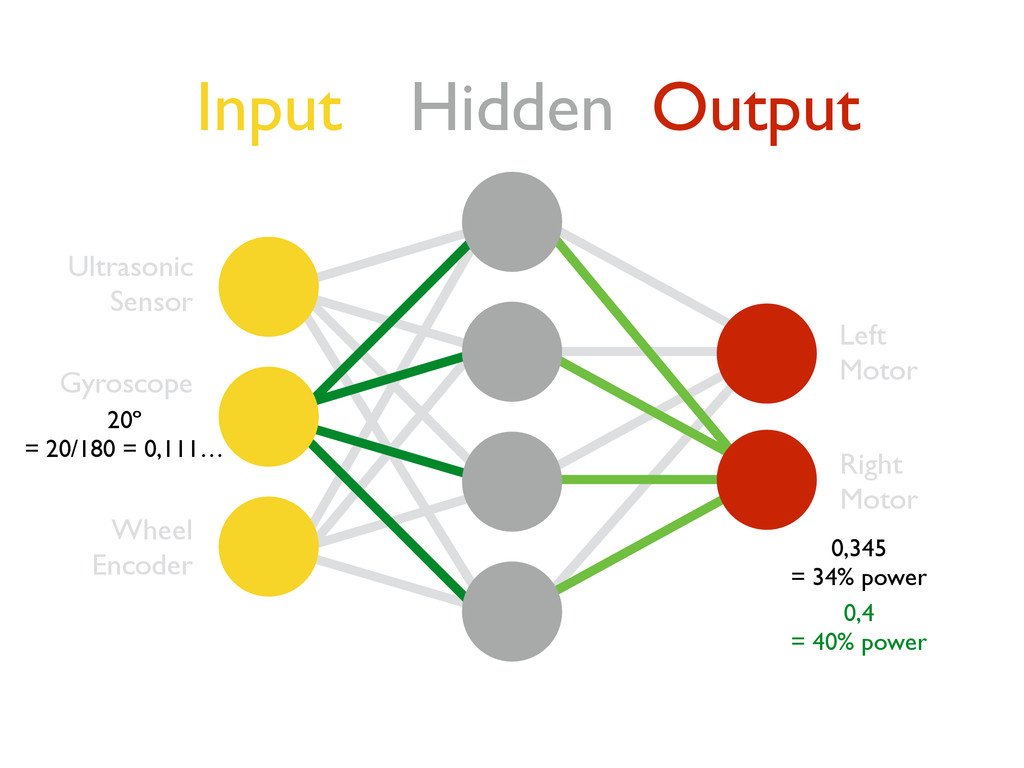
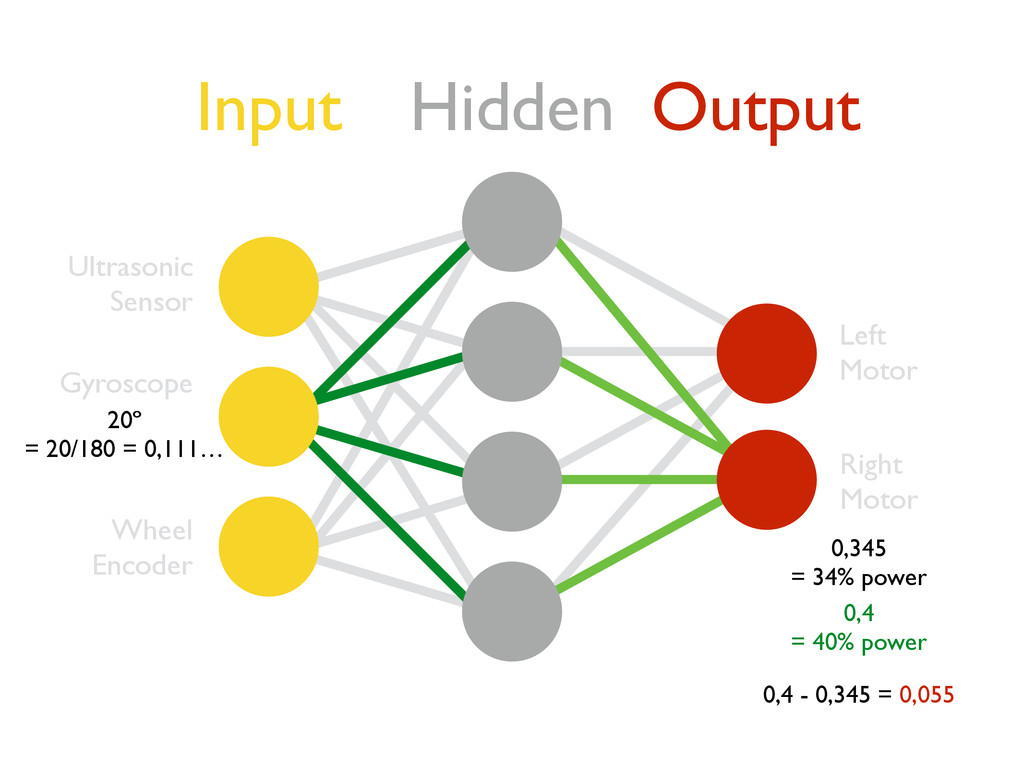
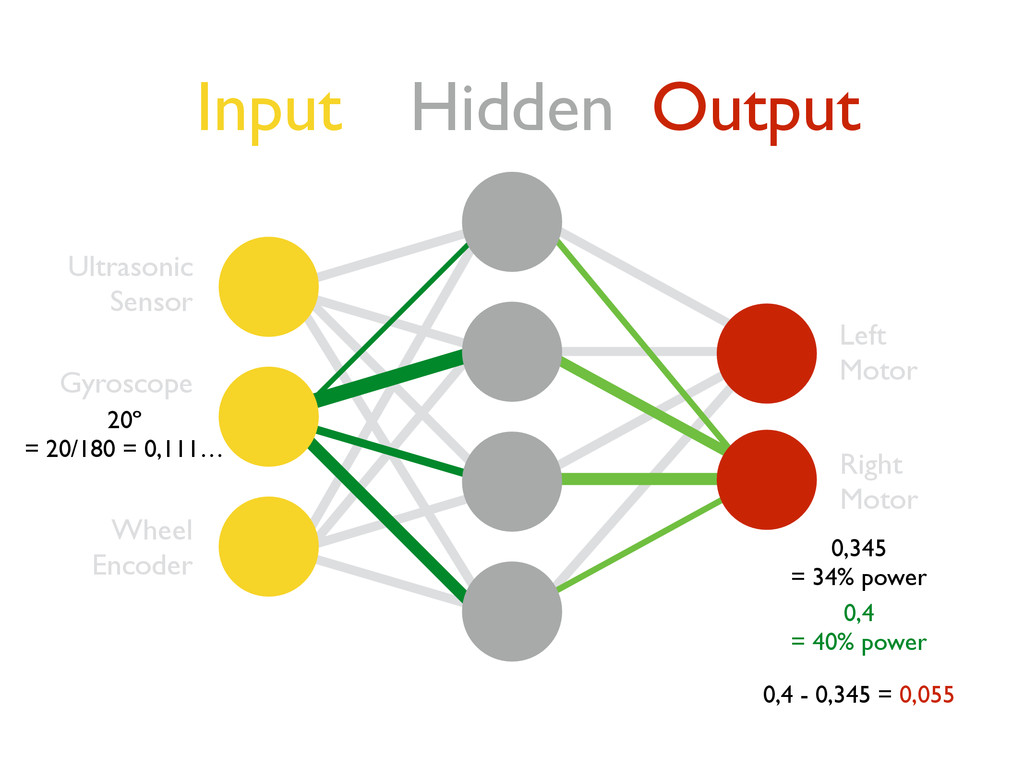
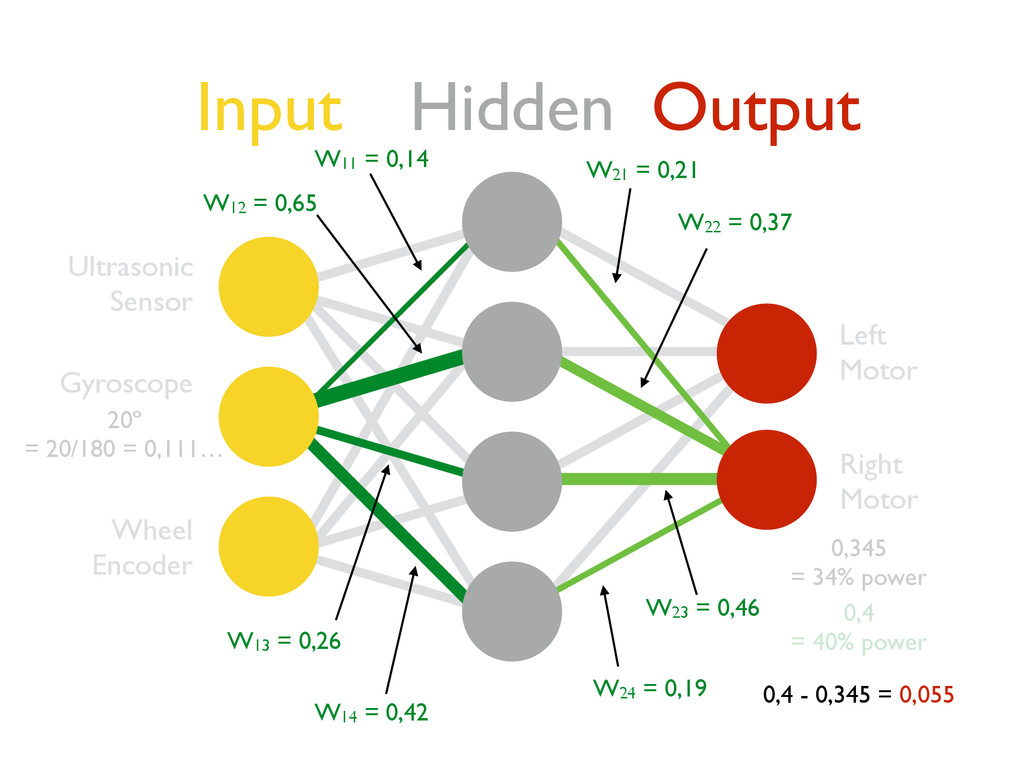
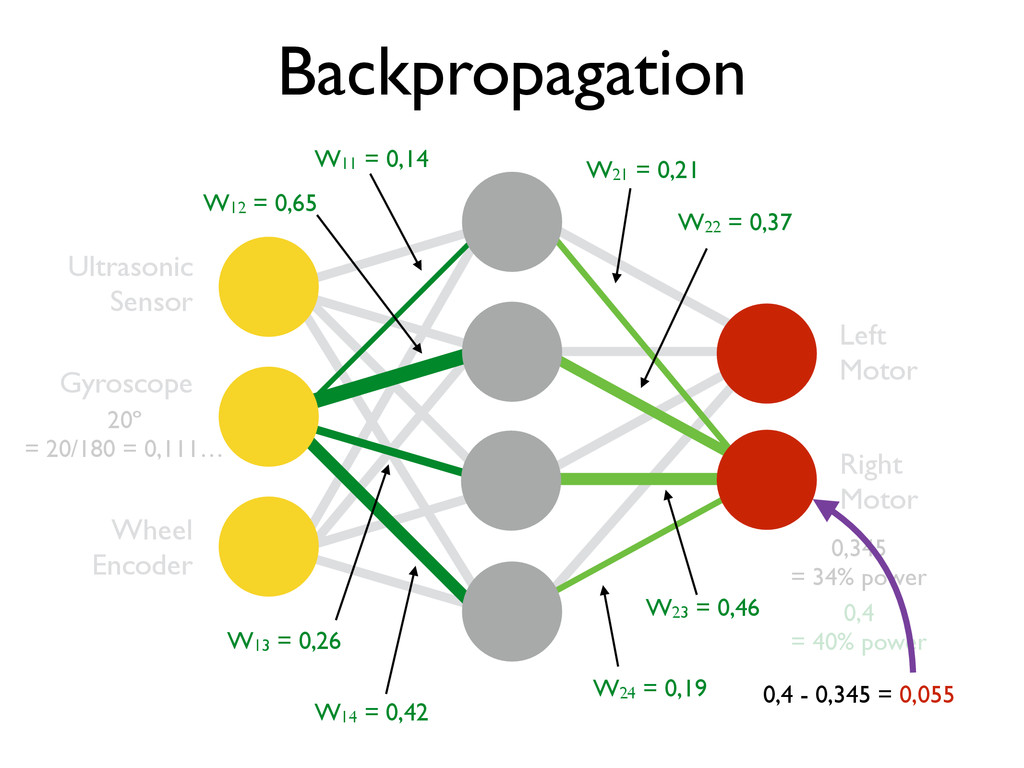
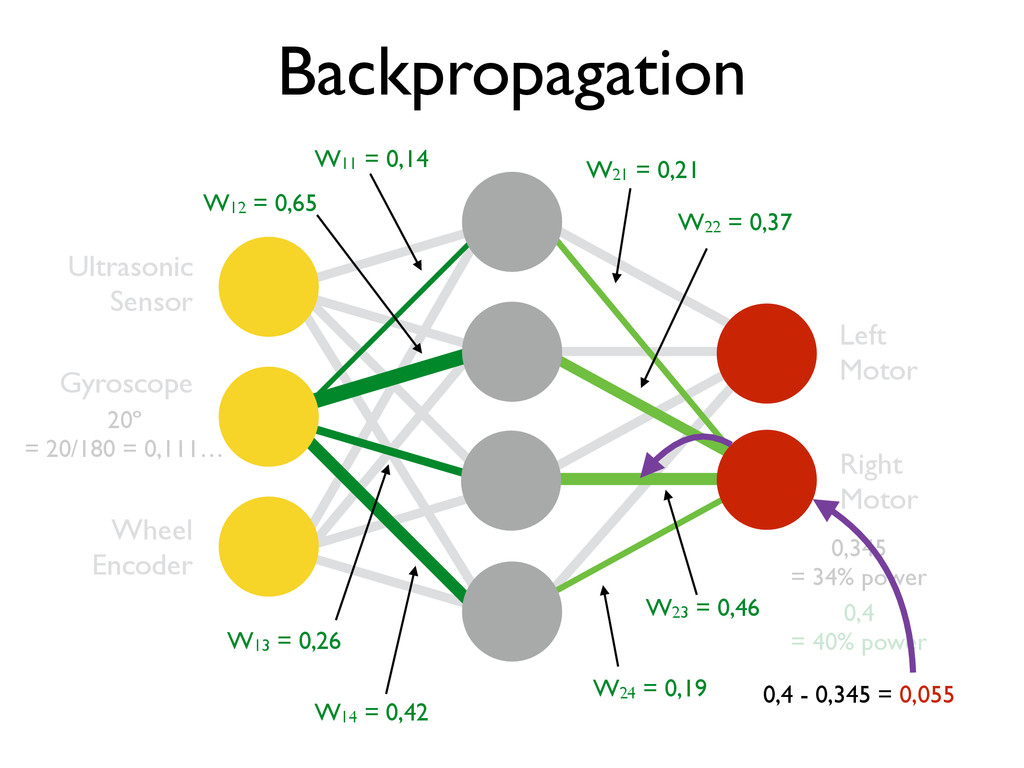
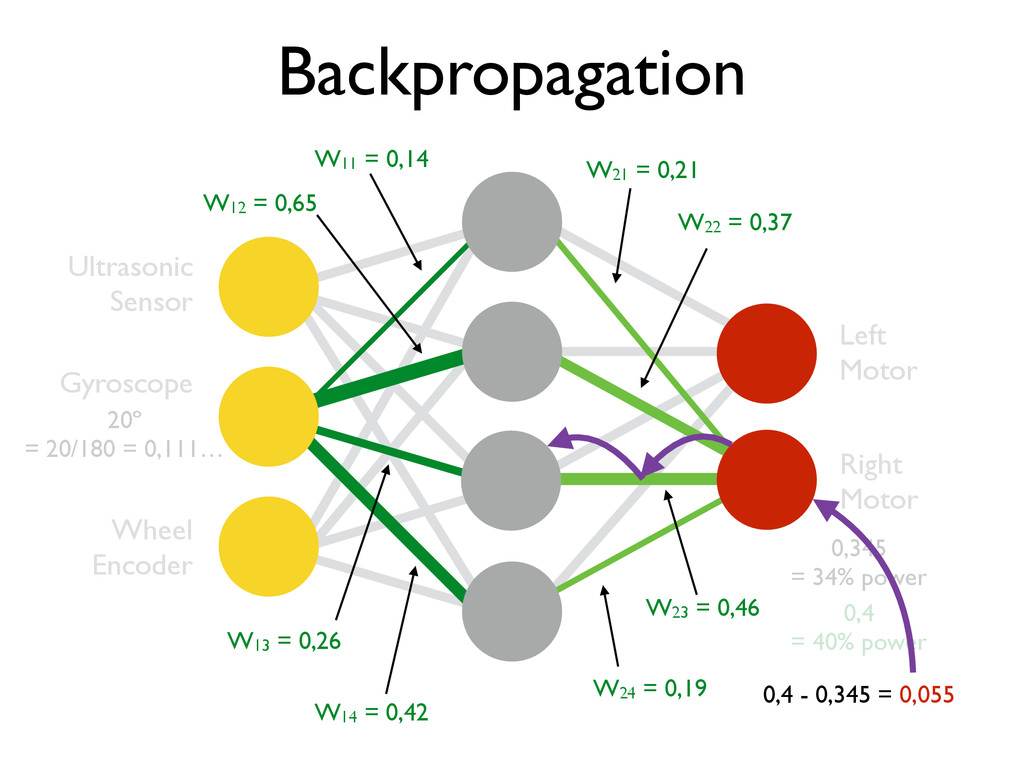
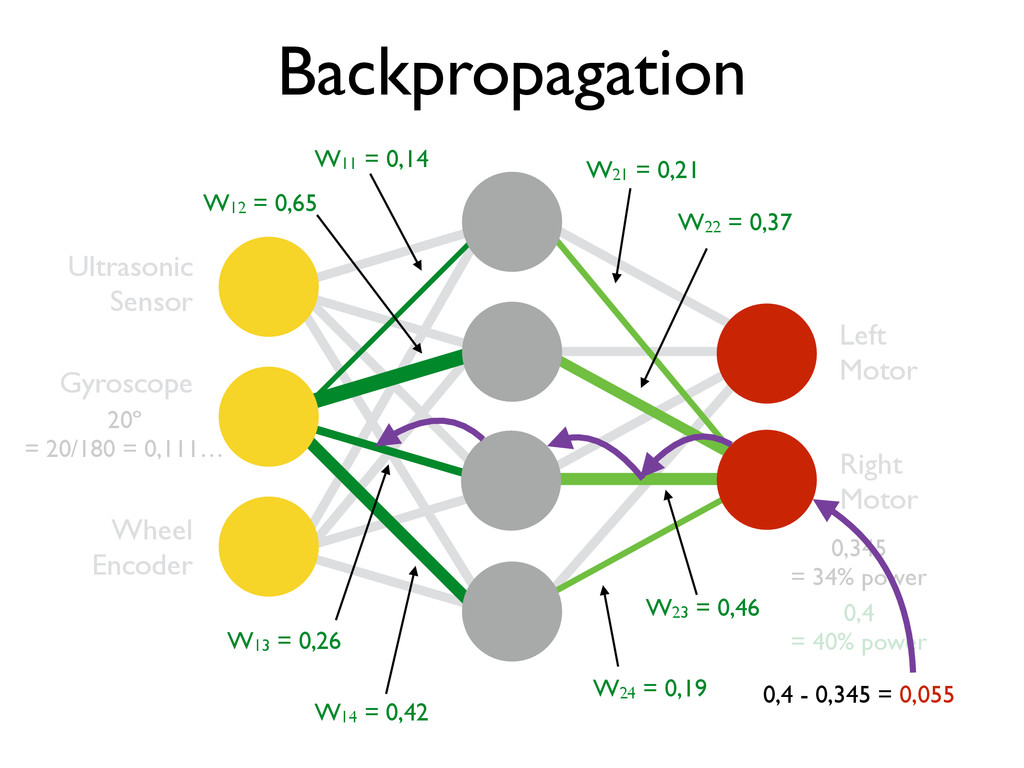
Neural Networks are another type of Artificial Intelligence used in computing. They are used in computer games, expert systems and at many more places.
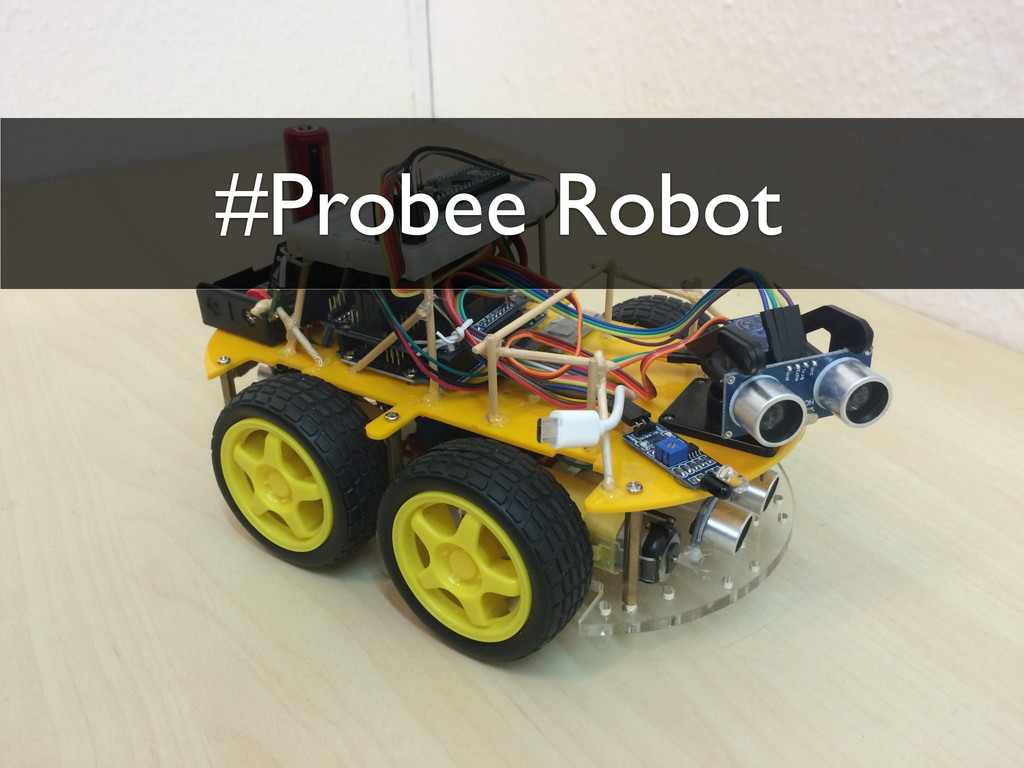
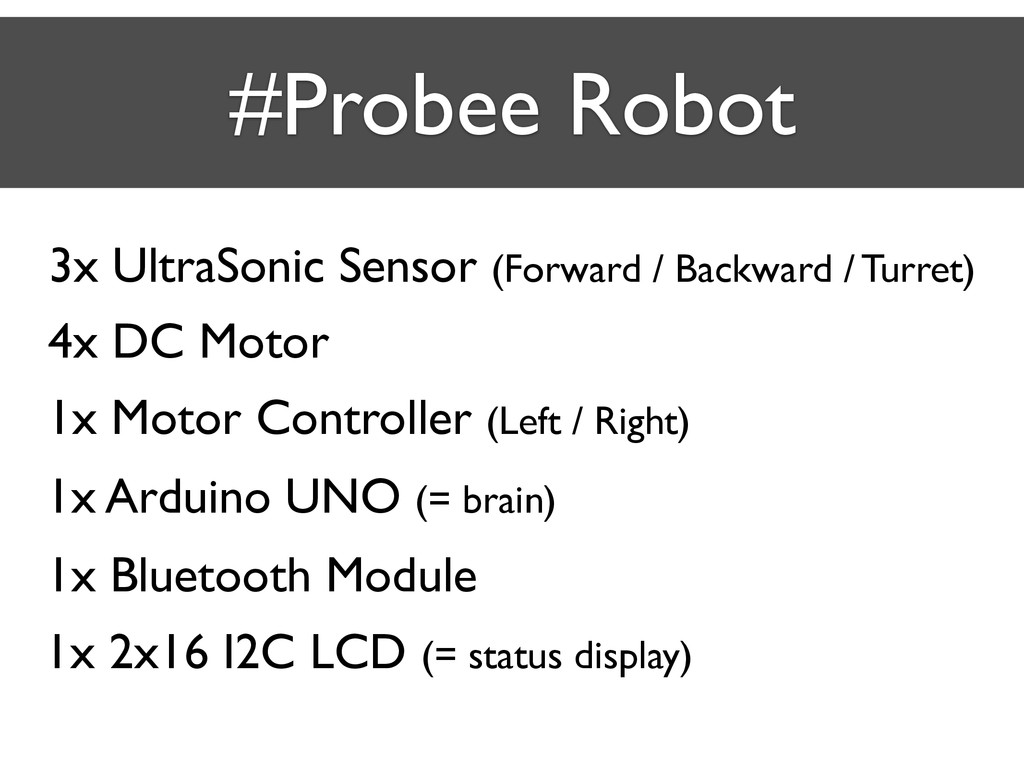
A in a limited way you are able to use them on Arduino too - eg. to steer an Arduino robot! In my presentation I will explain more about this topic.
This slides were presented on my presentation "Arduino, roboti a neurální sítě" at Czech Arduino Day 2015 on BarCamp Plzeň (more info at https://plzenskybarcamp.cz/2015/arduino-day) #ArduinoD15 #Arduino #barCampCZ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}