Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Making JetBot
Search
masa-ita
August 24, 2019
Technology
220
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Making JetBot
masa-ita
August 24, 2019
More Decks by masa-ita
See All by masa-ita
Ollamaを使ったLocal Language Model活用法
itagakim
1
240
Run Instant NeRF on Docker
itagakim
1
2.4k
3D Clustering and Metric Learning
itagakim
0
410
Cloud TPUの使い方〜BigBirdの日本語学習済みモデルを作る〜
itagakim
0
750
多言語学習済みモデルmT5とは?
itagakim
1
790
AWSのGPUを安く使って TensorFlowモデルを訓練する方法
itagakim
0
420
最近の自然言語処理モデルの動向
itagakim
1
590
ディープラーニングで芸術はできるか? 〜生成系ネットワークの進展〜
itagakim
0
380
AWSとTerraform初心者が やってみたこと
itagakim
1
530
Other Decks in Technology
See All in Technology
もう一度考える SRE チームの作り方・育て方 / Rethinking SRE #1: Building and Growing SRE Teams
rrreeeyyy
4
620
AI駆動開発は個人技からチーム戦へ:組織でAIを使いこなすための実践設計
moongift
PRO
0
390
コンポーネント名には何を含めるべきなのか? / what-should-be-included-in-component-names
airrnot1106
0
230
Data Hubグループ 紹介資料
sansan33
PRO
0
3.1k
クラウドを使う側から、作る側へ / 大吉祥寺.pm 2026前夜祭
fujiwara3
8
2k
【CEDEC2026】ゲームシナリオライターを支援するAIツール開発の実践 ― 設計とプロンプトの工夫 ―
cygames
PRO
1
160
Escolhendo LLMs na Prática: Lições Reais em Busca Agêntica no Mercado Livre —TDC 2026 Floripa
jpbonson
0
110
13年運用タイトルのサーバーサイドが辿り着いた現在地 ― モンスターストライクにおける技術・組織・AI活用から得た知見
mixi_engineers
PRO
1
380
書籍セキュアAPIについて
riiimparm
0
400
AIがコードを書く時代、人間は何を保証するのか———馬場さんと考える、開発者に求められる新しい責任と価値 - TECH PLAY
netmarkjp
0
1k
toio・myCobotでフィジカルAIっぽいことを行うための検討(とりあえず調査) / フィジカルAI LT(IoTLTによる開催)
you
PRO
0
220
運用を犠牲にせずコストを制御し事業成長を支える B2B SaaS ID管理基盤におけるS3 Tableのログストレージ活用
kaminashi
1
130
Featured
See All Featured
What the history of the web can teach us about the future of AI
inesmontani
PRO
1
650
Utilizing Notion as your number one productivity tool
mfonobong
4
490
The Impact of AI in SEO - AI Overviews June 2024 Edition
aleyda
5
1.1k
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
280
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
650
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
420
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
HDC tutorial
michielstock
2
760
Getting science done with accelerated Python computing platforms
jacobtomlinson
2
370
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
400
Writing Fast Ruby
sferik
630
63k
Transcript
JETSON NANOで ⾃律⾛⾏ロボットJETBOTを 作ってみた 板垣 正敏 2019/8/24 PYTHON機械学習勉強会 IN 新潟
RESTART #8
前回のLTから
GOOGLE EDGE TPU 板垣正敏 @PYTHON機械学習勉強会IN新潟 2019/6/1
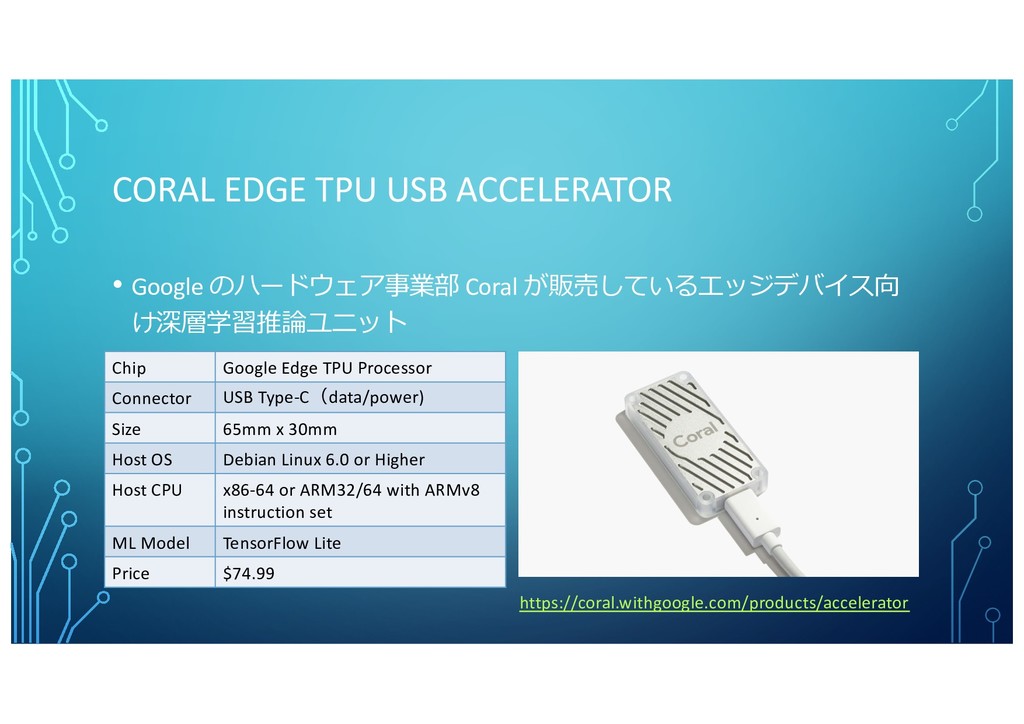
CORAL EDGE TPU USB ACCELERATOR https://coral.withgoogle.com/products/accelerator Chip Google Edge TPU
Processor Connector USB Type-C(data/power) Size 65mm x 30mm Host OS Debian Linux 6.0 or Higher Host CPU x86-64 or ARM32/64 with ARMv8 instruction set ML Model TensorFlow Lite Price $74.99 • Google のハードウェア事業部 Coral が販売しているエッジデバイス向 け深層学習推論ユニット
対抗⾺登場︕NVIDIA JETSON NANO https://developer.nvidia.com/embedded/buy/jetson-nano-devkit GPU 128-core Maxwell CPU Quad-core ARM
A57 @ 1.43 GHz Memory 4 GB 64-bit LPDDR4 25.6 GB/s Storage microSD Connector Gigabit Ether/HDMI/USB/ Camera I/O GPIO/I2C/I2S/SPI/UART OS Debian Price $99.00 https://developer.nvidia.com/embedded/jetson- nano-dl-inference-benchmarks
きっかけ
第33回⼈⼯知能学会@新潟 • NVIDIAの出展していたブースで • 私「GoogleのEdge-TPUは買ったんですけど」 • NVIDIAの⼈「Jetson Nano 開発キットはUSB 3.0なので、Edge
TPUも早い ですよ。Edge TPUを刺して両⽅使っている⼈もいますよ」 • 私「なるほど︕」
JETBOTも 動いてました • Jetson Nanoを搭載した⾃ 律⾛⾏ロボット • パーツリストと組み⽴て ⽅が公開されている •
ソフトウェアはOSイメー ジをダウンロード • ボディは3Dプリンタ⽤の データが公開
3Dプリンタが無いとできないの︖ • そもそも持ってないし使ったことも無い • ⻑岡のNaDeC BASEで借りるには講習会受講が必要かあ • 8/14の回に申し込み → 受講しました︕
• でも8/24には間に合いそうにないなあ • 新潟エスラボの⽥中さんがやってる「荻川ITラボ」で借りられるか も︖ • 相談したら「有料で良ければ出⼒してあげるよ」→ 速攻「お願いします︕」
荻川IT⼯房 • 新潟エスラボの事務 所兼コミュニティス ペース http://niigata-sl.com/ogikawaitkoubou
やってみた︕私の失敗と注意点
参照サイト • オージス総研のブログ • https://www.ogis-ri.co.jp/otc/hiroba/technical/lets-try-jetbot/part1.html • 本家GitHub/Wiki • https://github.com/NVIDIA-AI-IOT/jetbot
部品購⼊ • 基本はオージス総研のブログのリストから • Cameraモジュールのリンク先が違った︕ • https://www.amazon.co.jp/gp/product/B01ER2SKFS/ が適切 • PiO
LED ディスプレイがマルツで在庫なし • スイッチサイエンスで購⼊ https://www.switch- science.com/catalog/3393/
部品リストにないもの • ⼯具 • ハンダゴテ、ニッパー、ケーブルストリッパー、ドライバー、ヤスリ等 • ブログ・Wiki参照 • ネジ(本家Wikiにはある) •
私の場合 リストのM2 8mmは⻑すぎ(鍋ネジだったのでなおさら) • M2 6mm ⽫ネジがフィット • パッチケーブル • オスーメス(オス)✕ 4本(モーター接続⽤) • メスーメス ✕ 4本(モータードライバ接続⽤)
私の失敗 • はんだ付けも久しぶり • モータードライバで何度も失敗 • 3pinと2pinの位置を2度取り違え • ターミナルブロックの⽳の⽅向を間違え •
1度はんだ付けしたものを抜いて再挿⼊する のに四苦⼋苦 • ハンダゴテの熱でLSIが壊れていないかヒヤ ヒヤ
あったほうが 良いもの lモータードライバは⼩さ な基盤なので、固定でき ないと作業が難しい lたいてい両⼿がふさがっ ているし、熱伝導で熱く なるので、⼿で押さえる のは困難 https://www.amazon.co.jp/gp/product/B004NXTW18/
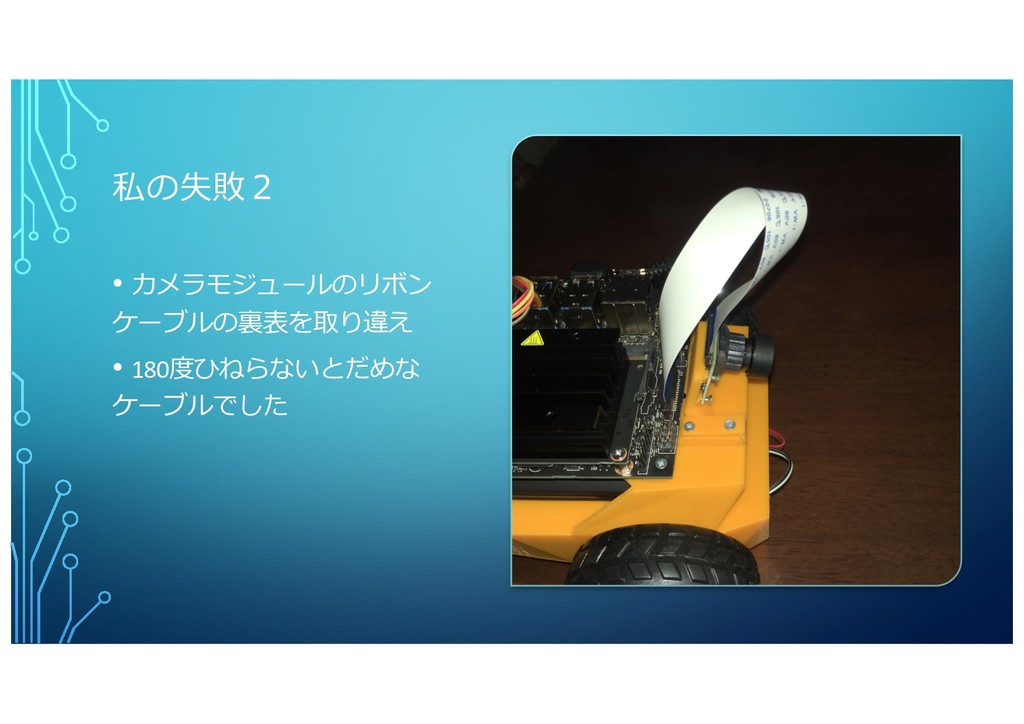
私の失敗2 • カメラモジュールのリボン ケーブルの裏表を取り違え • 180度ひねらないとだめな ケーブルでした
なんとか完 成︕ • ちょっとUSB電源 ケーブルが⻑すぎ て邪魔ですが…
デモ
JET RACER 登場 • Donkey Carと似たレーサー • LaTraxあるいはTamiyaのラ ジコンカーベース •
JetBotより⾼速で、ステア リングの他にスロットリ ングも可能
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}