Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
17_1019 人と接触するロボットのための安全な力制御技術
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
Ryo Kikuuwe
October 19, 2017
Technology
1.8k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
17_1019 人と接触するロボットのための安全な力制御技術
九州大学・科学技術振興機構(JST)共催,新技術説明会,2017年10月19日(木).
Ryo Kikuuwe
October 19, 2017
More Decks by Ryo Kikuuwe
See All by Ryo Kikuuwe
26_0616 ロボットの力制御:要件の整理
kikuuwe
0
32
26_0423 ロボットの力制御:論点と要件の整理
kikuuwe
0
93
23_1211 Nonsmooth Modeling of Hydraulic Systems and Its Application to Control of Hydraulic Excavators
kikuuwe
0
320
22_0910 非平滑力学へのお誘い
kikuuwe
0
1.7k
22_0905 可逆駆動性の低い歯車減速機の運動方程式表現
kikuuwe
0
1.6k
20_1025 Torque-Bounded Admittance Control Realized by a Set-valued Algebraic Feedback
kikuuwe
0
460
19_1216 Differential-Algebraic Relaxation and Set-Valued Algebraic Loop for Realization of Sliding Mode Systems
kikuuwe
0
270
19_0906 A First-Order Differentiator with First-Order Sliding Mode Filtering
kikuuwe
0
380
19_0530 非圧縮流体仮定にもとづく油圧シリンダの準静的モデル
kikuuwe
0
880
Other Decks in Technology
See All in Technology
Escolhendo LLMs na Prática: Lições Reais em Busca Agêntica no Mercado Livre —TDC 2026 Floripa
jpbonson
0
120
Power Automateアップデート情報
miyakemito
0
290
Claude Code並行開発環境の ムダ‧ムラ‧ムリを見直した話
muranakaaa
1
390
システム監視を 「システムを監視するだけ」で 終わらせないために
seiud
0
160
Webの技術とガジェットで子どもも大人も楽しめるワクワク体験を提供する / Qiita Tech Festa Day 2026
you
PRO
1
330
Atlassian Cloudサポート業務でのAIエージェント活用事例
smt7174
0
230
20260801_スクフェス大阪
kgnkhkr
0
330
AI エージェント時代のデジタルアイデンティティ
fujie
2
1.3k
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
610
【CEDEC2026】ゲームシナリオライターを支援するAIツール開発の実践 ― 設計とプロンプトの工夫 ―
cygames
PRO
1
160
reFACToring
moznion
1
1.1k
AIツールを導入しても生産性はあがらない? カオナビが直面した 3つの壁と乗り越え方。/ Overcoming 3 Barriers to AI-Driven Productivity at kaonavi
kaonavi
0
1.3k
Featured
See All Featured
Build your cross-platform service in a week with App Engine
jlugia
234
18k
How Software Deployment tools have changed in the past 20 years
geshan
1
34k
Jamie Indigo - Trashchat’s Guide to Black Boxes: Technical SEO Tactics for LLMs
techseoconnect
PRO
0
550
The Art of Programming - Codeland 2020
erikaheidi
57
14k
Code Reviewing Like a Champion
maltzj
528
40k
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
620
Ethics towards AI in product and experience design
skipperchong
2
330
Automating Front-end Workflow
addyosmani
1370
210k
Leading Effective Engineering Teams in the AI Era
addyosmani
9
2.2k
The Limits of Empathy - UXLibs8
cassininazir
1
570
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
2k
WCS-LA-2024
lcolladotor
0
780
Transcript
1 人と接触するロボットのための 人と接触するロボットのための 安全な力制御技術 安全な力制御技術 http://home.hiroshima-u.ac.jp/kikuuwe/ http://www.youtube.com/kikuuwe/ 菊 植 亮
き く う え りょう 2017年9月30日まで:九州大学 大学院工学研究院 准教授 2017年10月1日から:広島大学 大学院工学研究科 教授
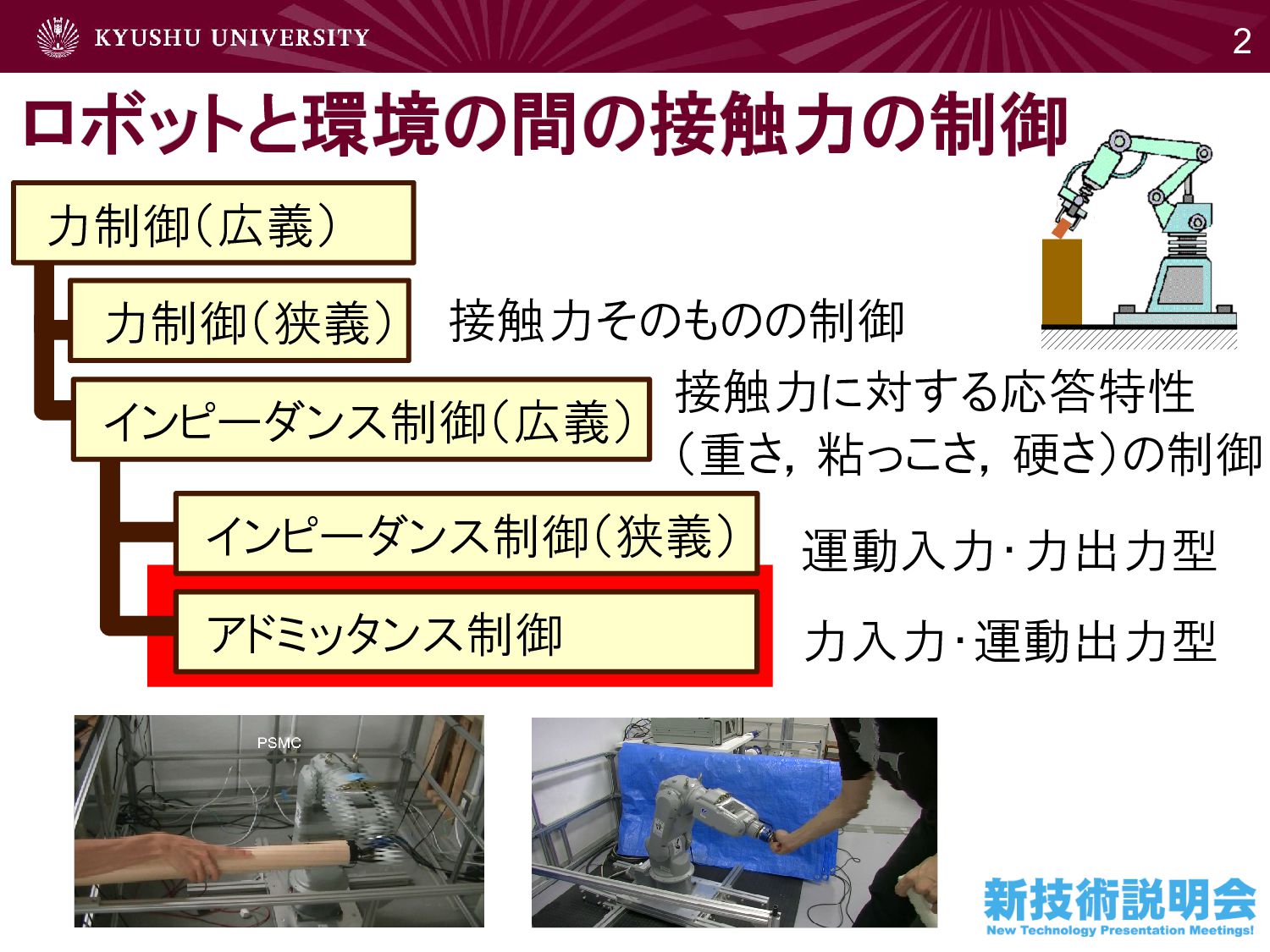
2 ロボットと環境の間の接触力の制御 ロボットと環境の間の接触力の制御 力制御(広義) インピーダンス制御(狭義) アドミッタンス制御 力制御(狭義) インピーダンス制御(広義) 接触力そのものの制御 接触力に対する応答特性
(重さ,粘っこさ,硬さ)の制御 運動入力・力出力型 力入力・運動出力型
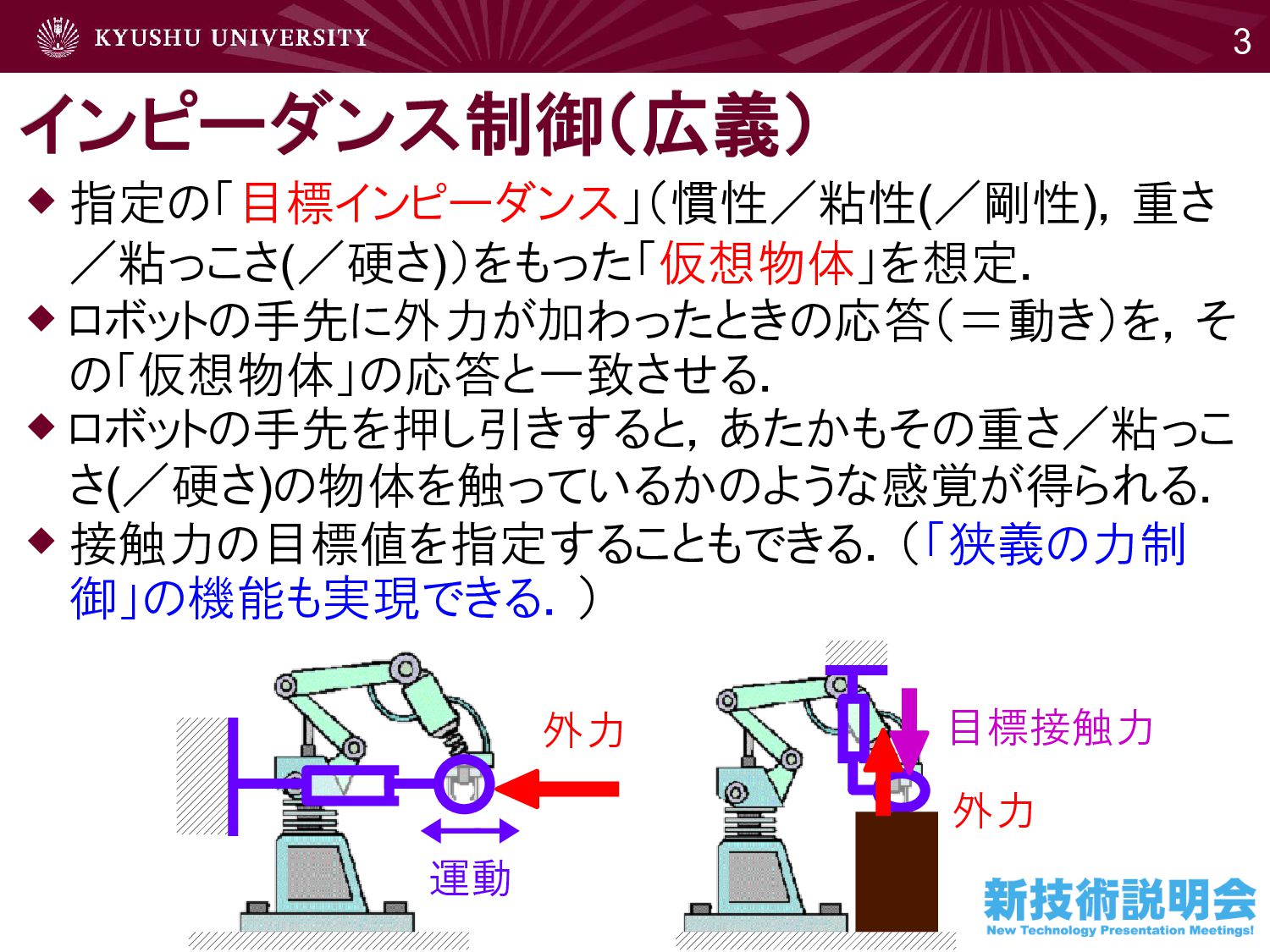
3 インピーダンス制御(広義) インピーダンス制御(広義) 指定の「目標インピーダンス」(慣性/粘性(/剛性),重さ /粘っこさ(/硬さ))をもった「仮想物体」を想定. ロボットの手先に外力が加わったときの応答(=動き)を,そ の「仮想物体」の応答と一致させる.
ロボットの手先を押し引きすると,あたかもその重さ/粘っこ さ(/硬さ)の物体を触っているかのような感覚が得られる. 接触力の目標値を指定することもできる.(「狭義の力制 御」の機能も実現できる.) 外力 運動 目標接触力 外力
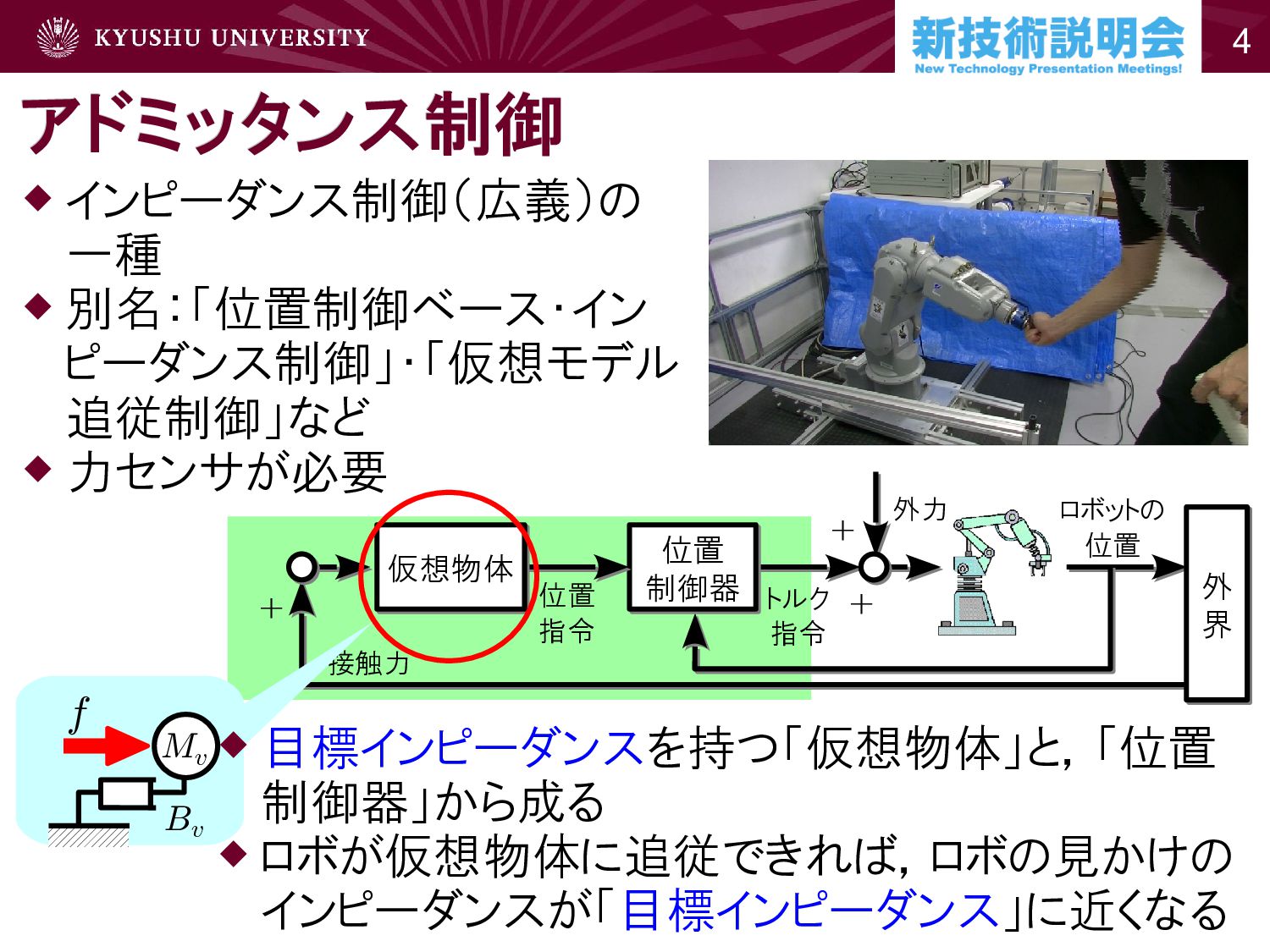
4 外 界 外 界 ロボットの 位置 接触力 位置 指令
位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + + アドミッタンス制御 アドミッタンス制御 インピーダンス制御(広義)の 一種 別名:「位置制御ベース・イン ピーダンス制御」・「仮想モデル 追従制御」など 力センサが必要 f Mv Bv 目標インピーダンスを持つ「仮想物体」と,「位置 制御器」から成る ロボが仮想物体に追従できれば,ロボの見かけの インピーダンスが「目標インピーダンス」に近くなる
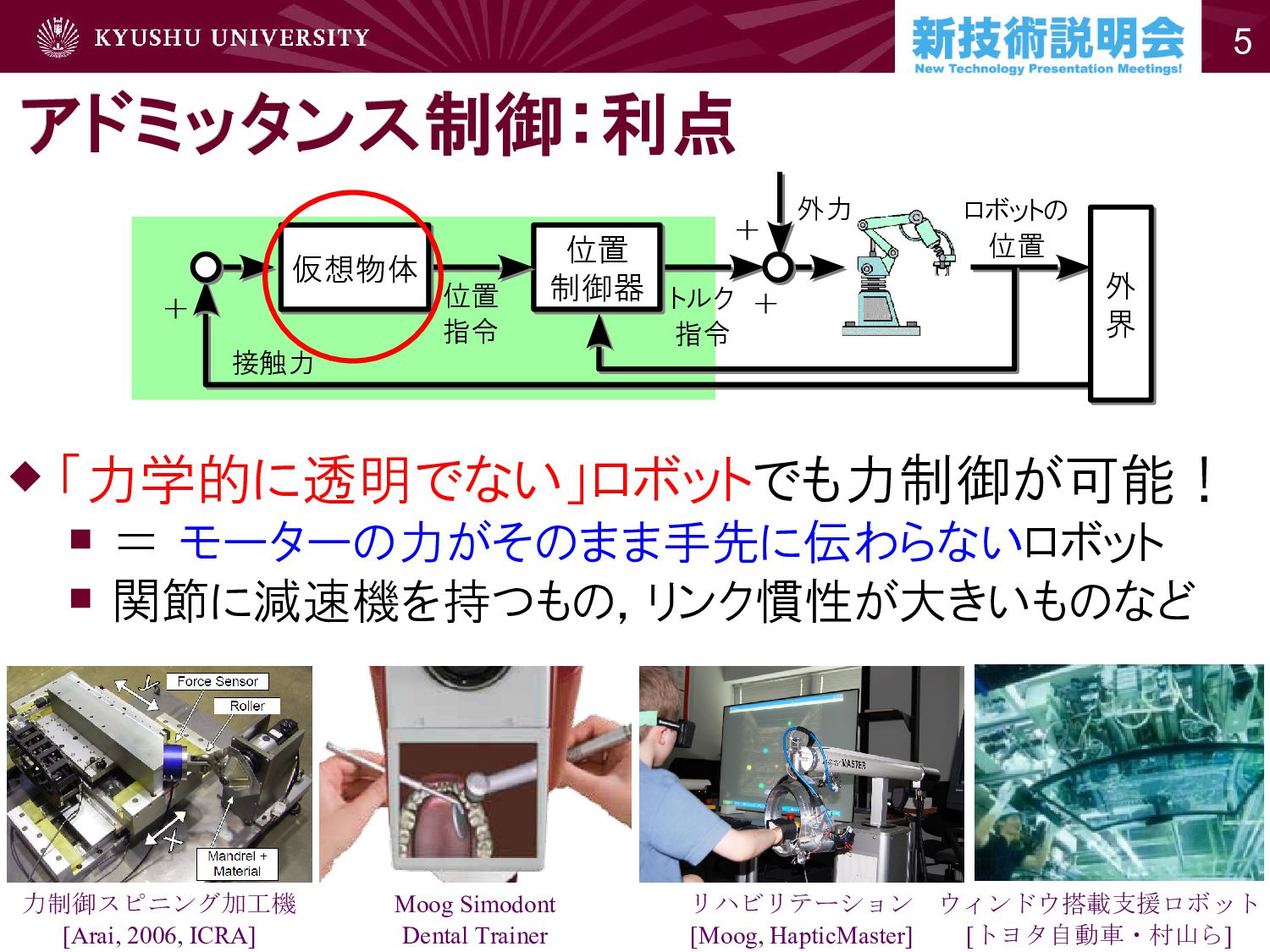
5 アドミッタンス制御:利点 アドミッタンス制御:利点 Moog Simodont Dental Trainer 力制御スピニング加工機 [Arai, 2006,
ICRA] ウィンドウ搭載支援ロボット [トヨタ自動車・村山ら] リハビリテーション [Moog, HapticMaster] 「力学的に透明でない」ロボットでも力制御が可能! = モーターの力がそのまま手先に伝わらないロボット 関節に減速機を持つもの,リンク慣性が大きいものなど 外 界 外 界 ロボットの 位置 接触力 位置 指令 位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + +
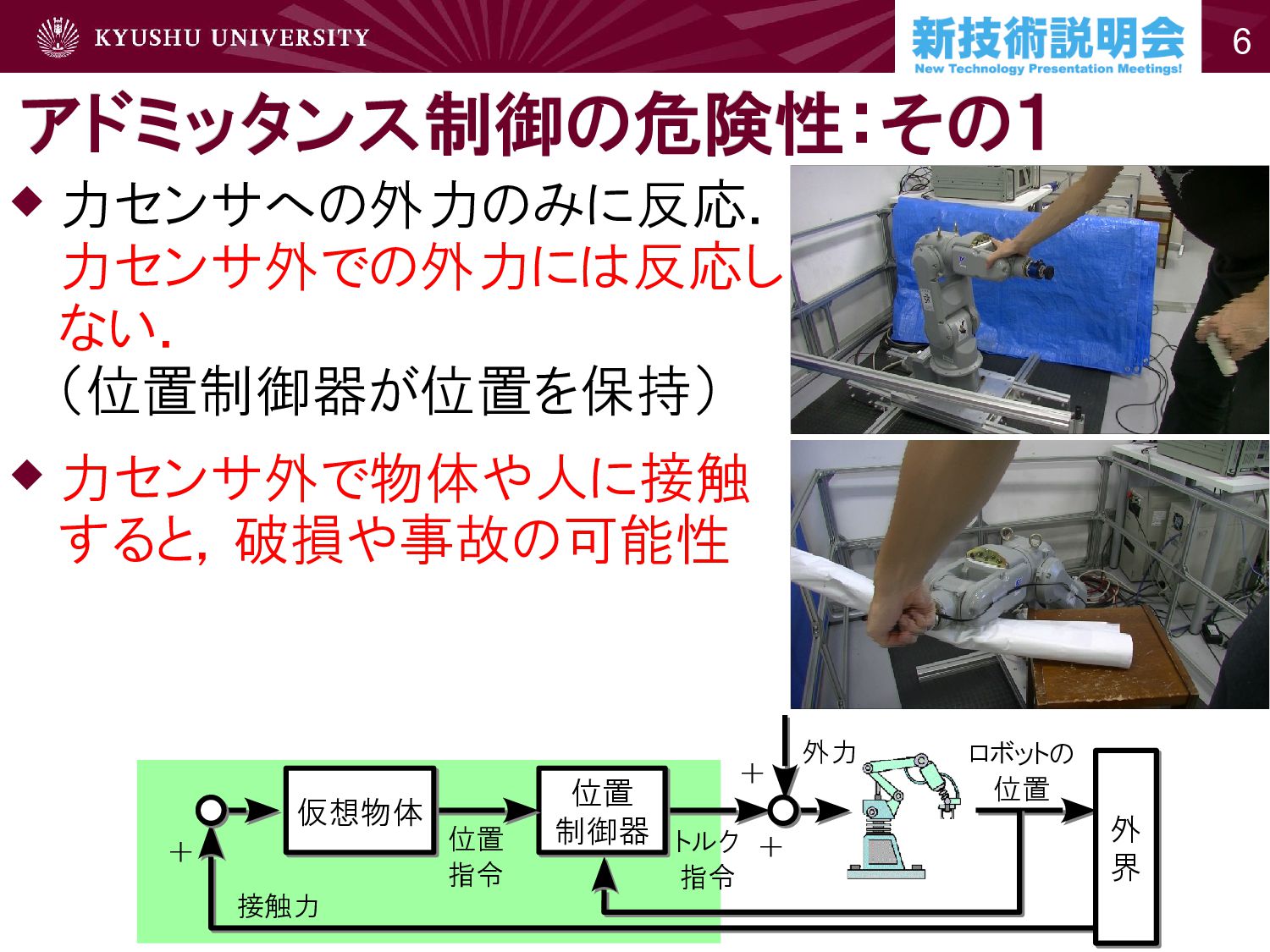
6 アドミッタンス制御の危険性:その1 アドミッタンス制御の危険性:その1 力センサへの外力のみに反応. 力センサ外での外力には反応し ない. (位置制御器が位置を保持) 力センサ外で物体や人に接触
すると,破損や事故の可能性 外 界 外 界 ロボットの 位置 接触力 位置 指令 位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + +
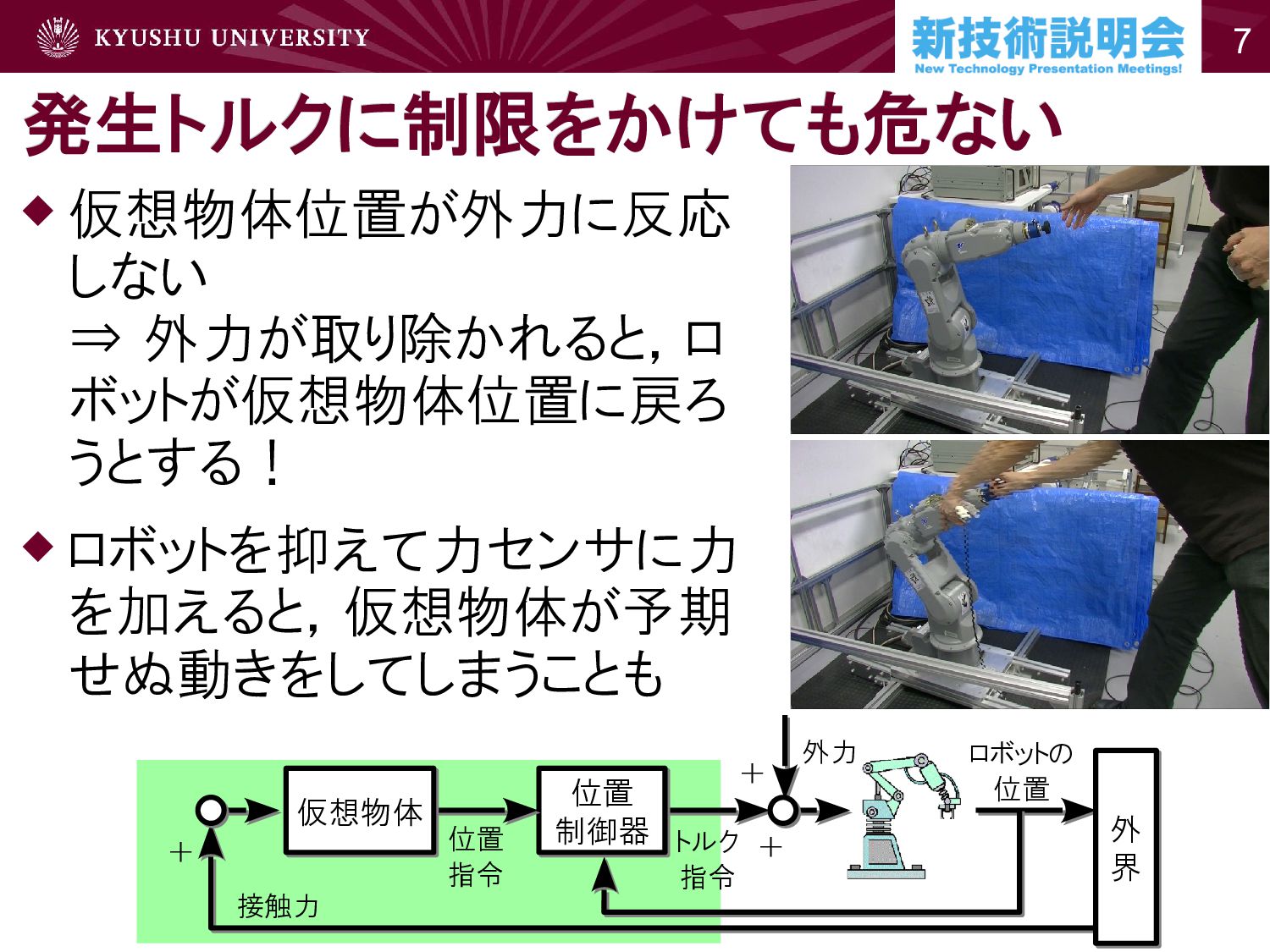
7 発生トルクに制限をかけても危ない 発生トルクに制限をかけても危ない 仮想物体位置が外力に反応 しない ⇒ 外力が取り除かれると,ロ ボットが仮想物体位置に戻ろ うとする!
ロボットを抑えて力センサに力 を加えると,仮想物体が予期 せぬ動きをしてしまうことも 外 界 外 界 ロボットの 位置 接触力 位置 指令 位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + +
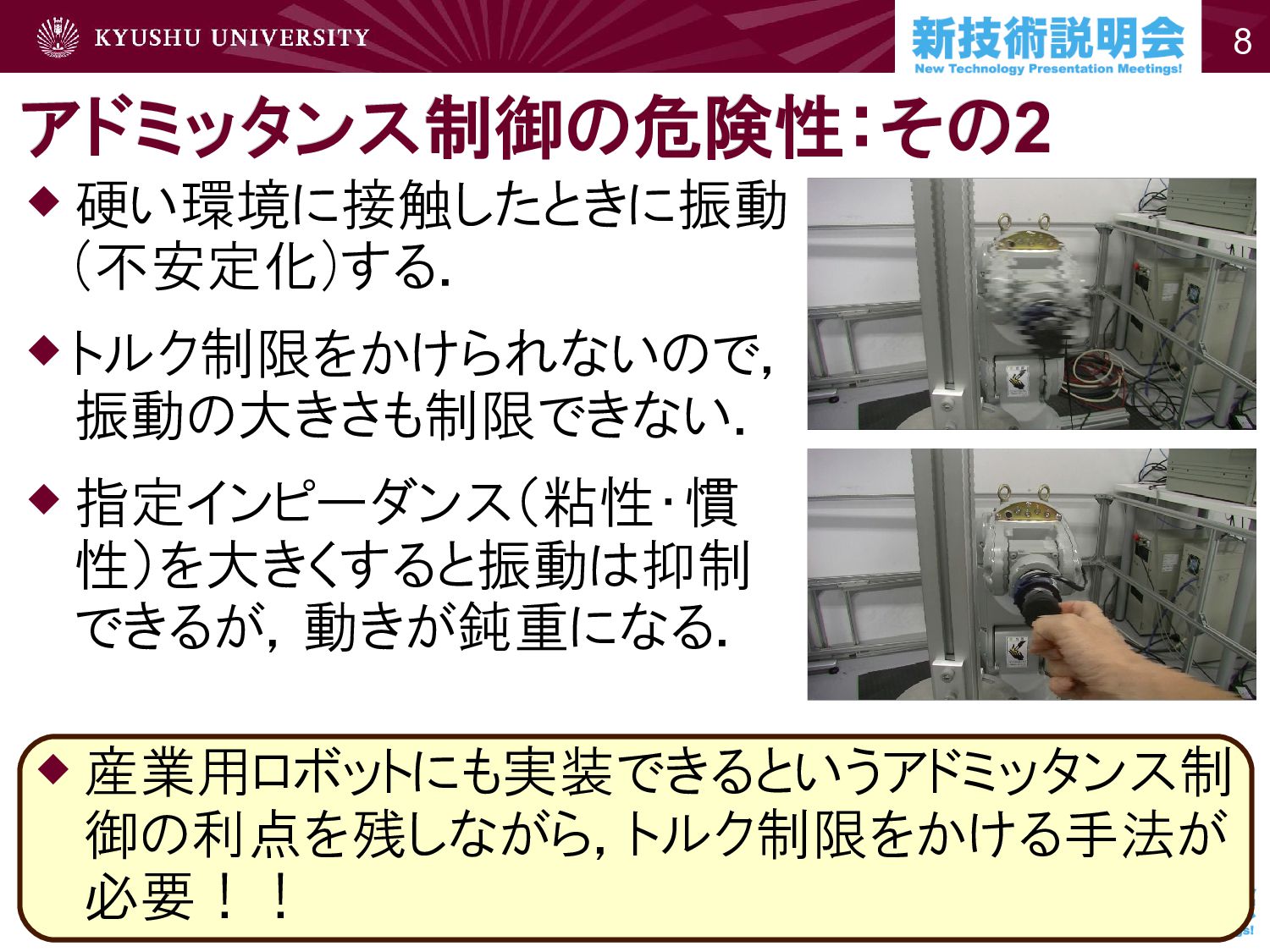
8 アドミッタンス制御の危険性:その アドミッタンス制御の危険性:その2 2 硬い環境に接触したときに振動 (不安定化)する. トルク制限をかけられないので, 振動の大きさも制限できない.
指定インピーダンス(粘性・慣 性)を大きくすると振動は抑制 できるが,動きが鈍重になる. 産業用ロボットにも実装できるというアドミッタンス制 御の利点を残しながら,トルク制限をかける手法が 必要!!
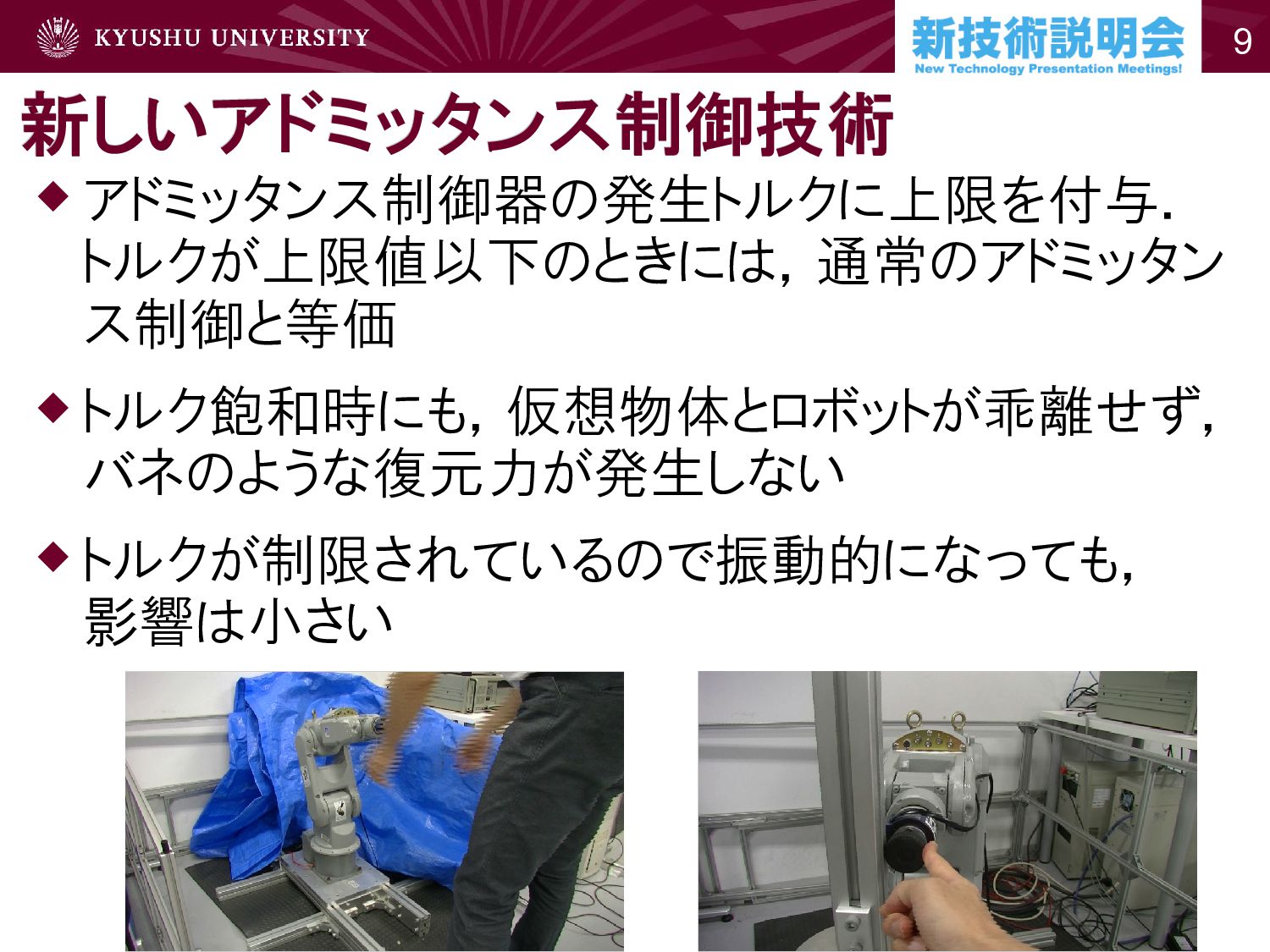
9 新しいアドミッタンス制御技術 新しいアドミッタンス制御技術 アドミッタンス制御器の発生トルクに上限を付与. トルクが上限値以下のときには,通常のアドミッタン ス制御と等価 トルク飽和時にも,仮想物体とロボットが乖離せず, バネのような復元力が発生しない
トルクが制限されているので振動的になっても, 影響は小さい
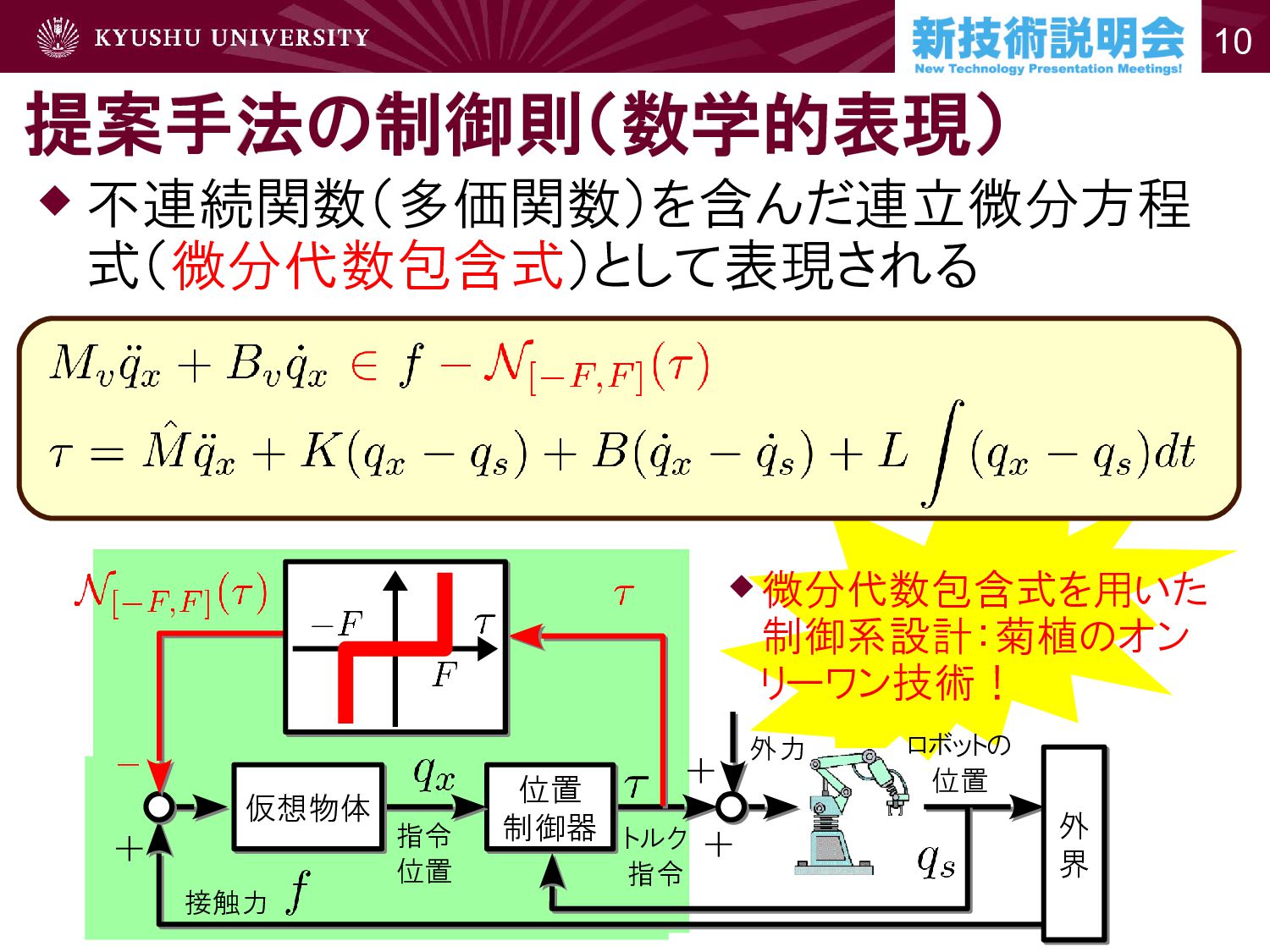
10 提案手法の制御則(数学的表現) 提案手法の制御則(数学的表現) 不連続関数(多価関数)を含んだ連立微分方程 式(微分代数包含式)として表現される 外 界 外 界
ロボットの 位置 接触力 指令 位置 位置 制御器 位置 制御器 トルク 指令 仮想物体 仮想物体 外力 + + + - 微分代数包含式を用いた 制御系設計:菊植のオン リーワン技術!
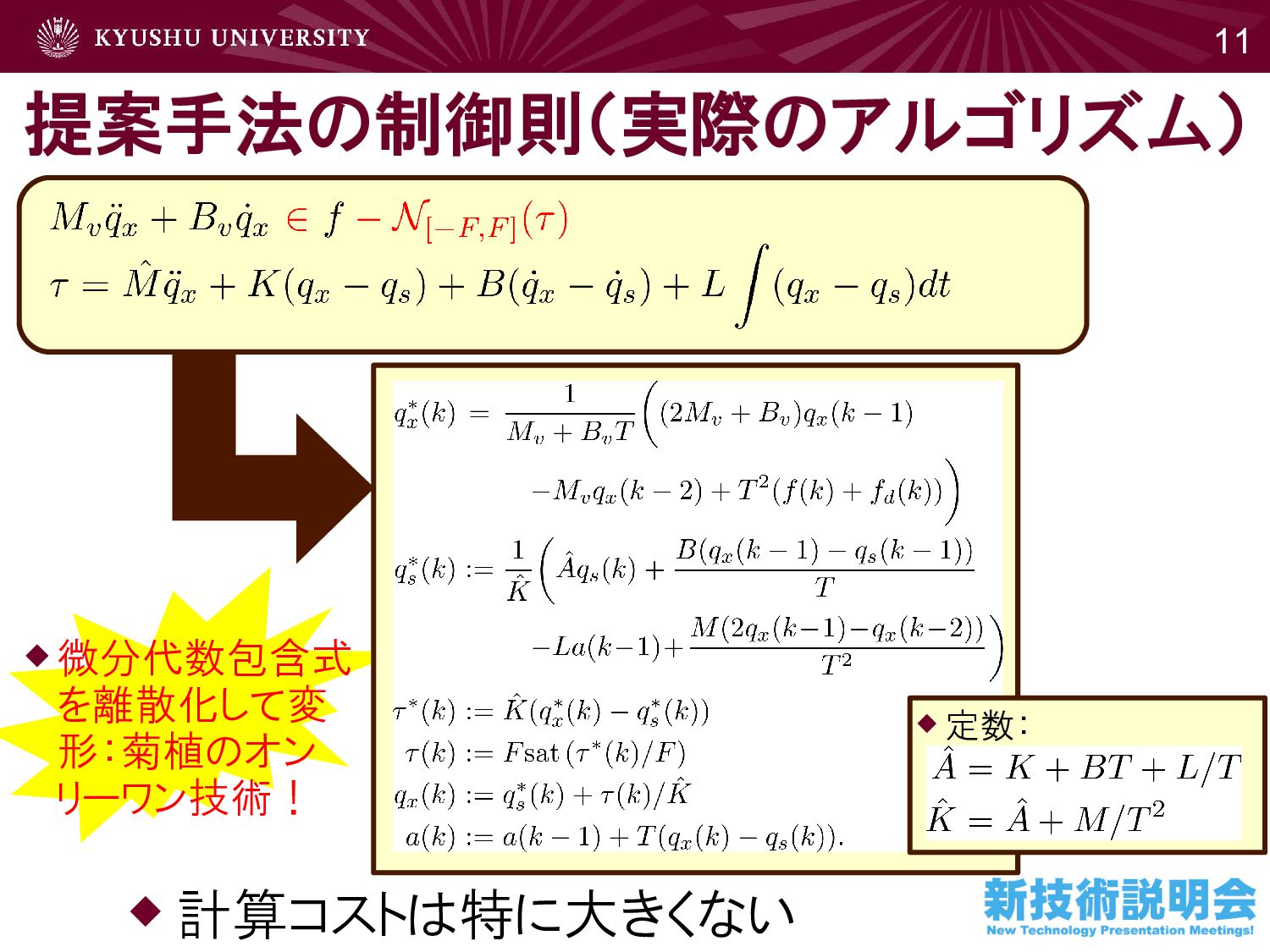
11 提案手法の制御則(実際のアルゴリズム) 提案手法の制御則(実際のアルゴリズム) 計算コストは特に大きくない 定数: 微分代数包含式 を離散化して変 形:菊植のオン リーワン技術!
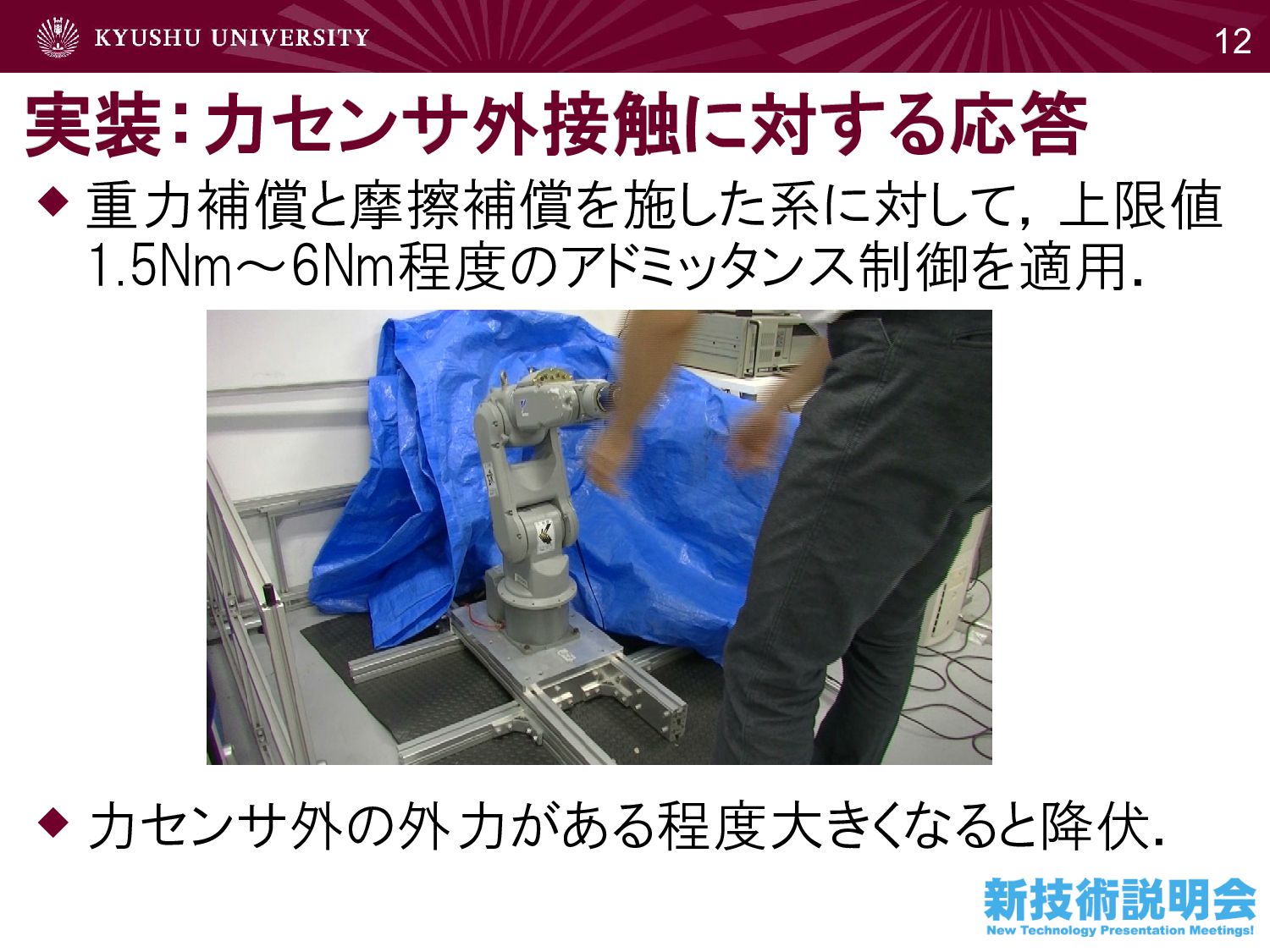
12 実装:力センサ外接触に対する応答 実装:力センサ外接触に対する応答 重力補償と摩擦補償を施した系に対して,上限値 1.5Nm~6Nm程度のアドミッタンス制御を適用. 力センサ外の外力がある程度大きくなると降伏.
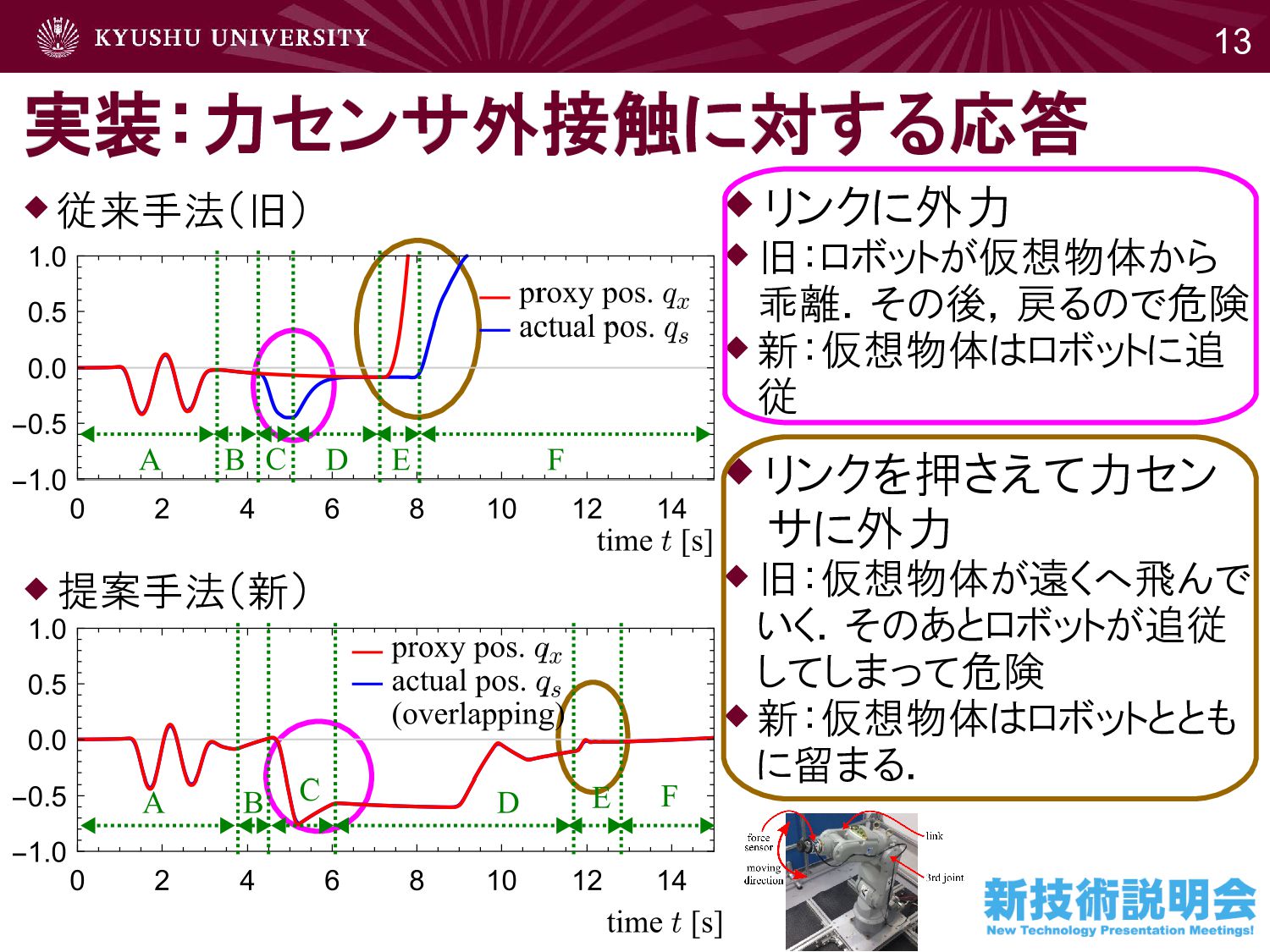
13 実装:力センサ外接触に対する応答 実装:力センサ外接触に対する応答 従来手法(旧) 提案手法(新) リンクに外力 旧:ロボットが仮想物体から 乖離.その後,戻るので危険 新:仮想物体はロボットに追
従 リンクを押さえて力セン サに外力 旧:仮想物体が遠くへ飛んで いく.そのあとロボットが追従 してしまって危険 新:仮想物体はロボットととも に留まる.
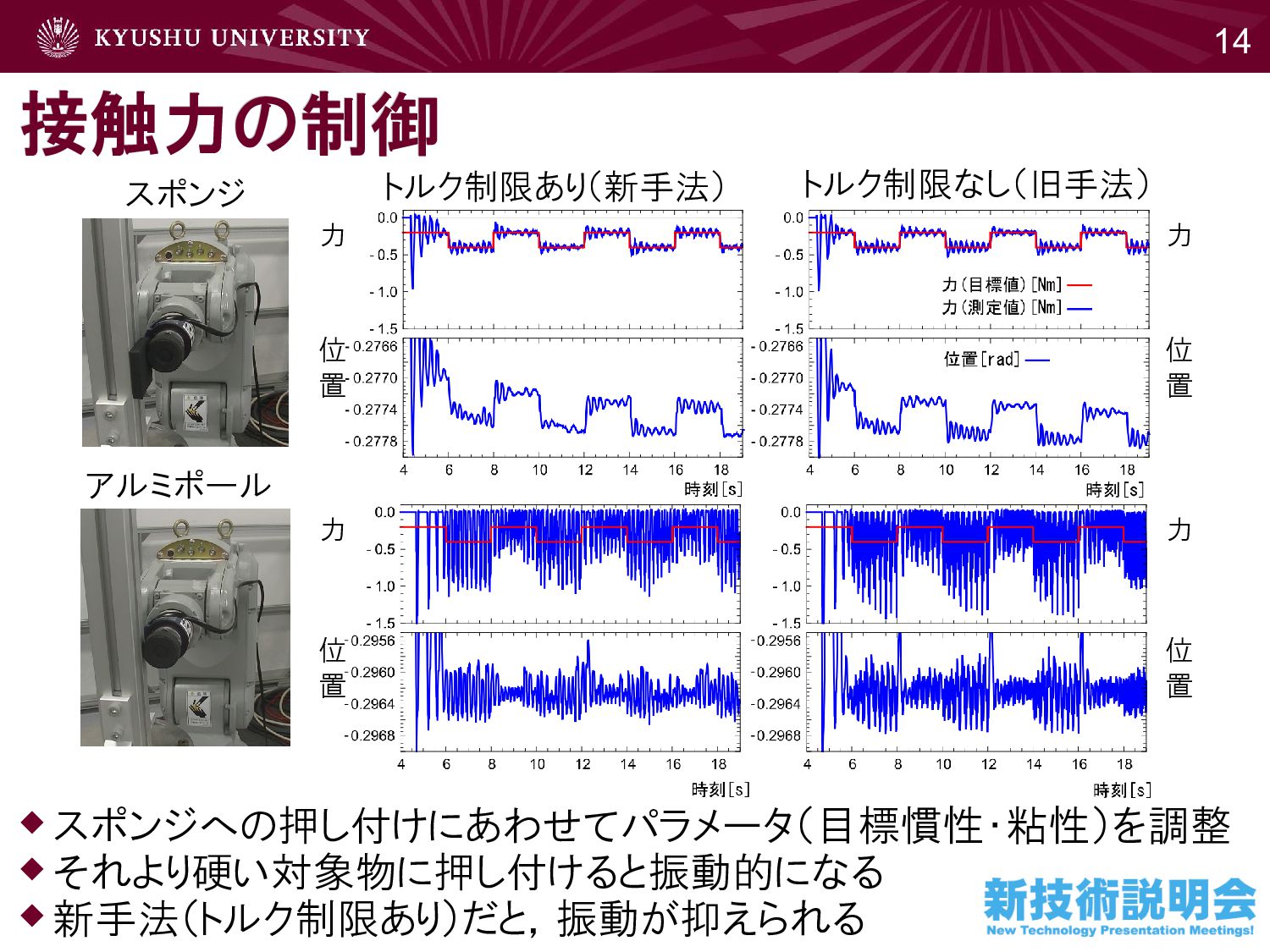
14 接触力の制御 接触力の制御 トルク制限なし(旧手法) トルク制限あり(新手法) スポンジ アルミポール スポンジへの押し付けにあわせてパラメータ(目標慣性・粘性)を調整 それより硬い対象物に押し付けると振動的になる 新手法(トルク制限あり)だと,振動が抑えられる
力 力 位 置 位 置 力 力 位 置 位 置
15 新技術の特徴・従来技術との比較 新技術の特徴・従来技術との比較 不連続性を含む連立微分方程式として制御則を構築する というアプローチは,世界的にもオンリーワン技術 「透明でない」ロボットの力制御において,トルクに制限かけ る本質安全を実現
従来のアドミッタンス制御は 力センサ部でしか接触しない トルク飽和しない という前提での利用に限られていた.その前提を除去する ことができる. 不安定化したときの危険性も小さくなる.
16 FAQ1 FAQ1 質問: 他の制御則でも同様の応答特性を実現可能か? 回答: 可能かもしれないが,おそらく複雑な条件分岐を含 んだ制御則が必要になる.条件が切り替わるときの
速度,加速度,トルクの連続性を保つためには注意 深いプログラミングが必要.複雑な条件分岐はプロ グラムのバグや信頼性の低下につながるので望ま しくない.
17 FAQ2 FAQ2 質問: 関節にトルクセンサがついていれば,この制御則は 必要ないのでは? 回答: その場合でも,モータートルクに明示的に上限を設
けるために,この制御則は有効です.
18 想定される用途 想定される用途 直感的なロボットティーチング ティーチングペンダントで数値で指定するのではなく, ロボットを直接手でつかんで動かして動きを教示 人と作業スペースを共有する産業用ロボット
作業時にロボットと人間が接触しても安全 人間と協調作業するロボット 重量物の位置決め/組み立て作業など 人間の動作を支援するロボット/メカトロニクス機器 脚,腰,腕などのリハビリや,パワーアシストなど
19 実用化に向けた課題 実用化に向けた課題 純粋に技術的な課題はないはず.しかし・・・ ほとんどの産業用ロボットは,メーカーの長年のノウ ハウが詰め込まれた専用位置制御器(関節角度制 御器)で制御される.
本技術の実装では位置制御器自体を改変する必 要があるため,若干,敷居が高いかもしれない. そこをなんとかクリアしていただければ,簡単に実装 可能です.(本技術に限らず,さまざまな力制御技 術も実装可能になります!!)
20 企業様への期待 企業様への期待 まずは実装して試してみてください! できるだけ制御周期の短い,トルク指令型のコントローラ が望ましい. 必要ならばお手伝いします.
具体的な適用先の候補やアイデアをお持ちであれ ば,ぜひお知らせください. 新たな研究テーマや制御則改良のヒントにもなります. 適用先に合わせたカスタマイズも可能です. 座標系の設定,多次元化など,関節トルクセンサへの 対応など
21 本技術に関する知的財産権 本技術に関する知的財産権 発明の名称:力制御装置,力制御方法及び 力制御プログラム 出願番号 :特願2017-136283
出願人 :九州大学 発明者 :菊植 亮
22 これ以外にも様々なメカトロ制御技術を これ以外にも様々なメカトロ制御技術を 保有しています.ご相談ください. 保有しています.ご相談ください. http://www.youtube.com/kikuuwe/
23 お問い合わせ先 お問い合わせ先 九州大学学術研究・産学官連携本部 知的財産グループ TEL: 092-832-2128
FAX: 092-832-2147 E-mail:
[email protected]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}