第40回日本ロボット学会学術講演会における発表資料.
内容の詳細は下記をご参照ください.
https://doi.org/10.36227/techrxiv.18583775
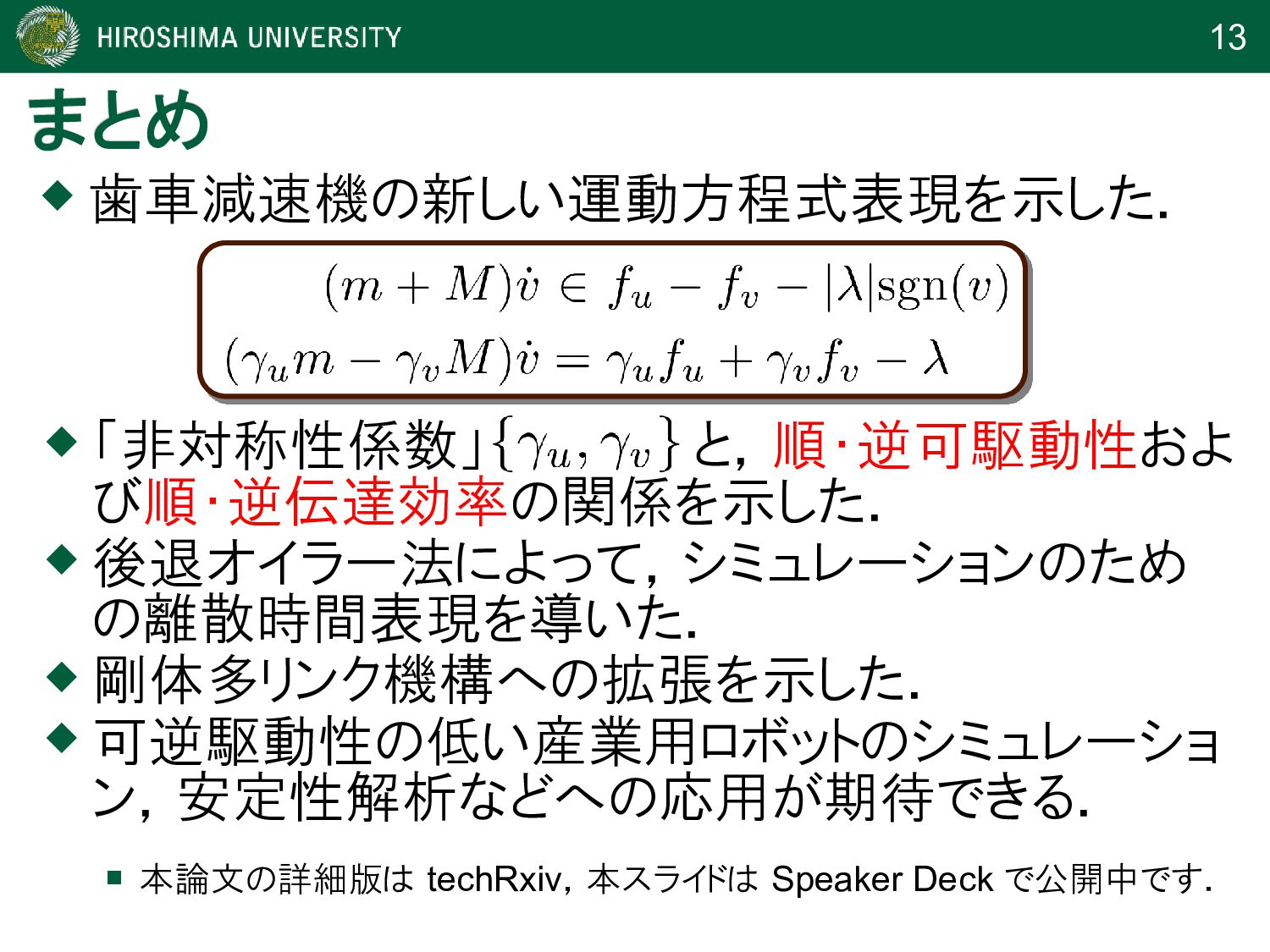
キーワード:バックドライバビリティ,backdrivability,摩擦,運動方程式,微分代数包含式,微分包含式,ギアボックス
Mechanism and Machine Theory に掲載されています.
https://www.sciencedirect.com/science/article/pii/S0094114X22003627
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}