Presented at the 15th International Workshop on Variable Structure Systems and Sliding Mode Control, Graz, Austria, July 11, 2018.
Its extended version is published in:
Ryo Kikuuwe: "Sliding Motion Accuracy of Proxy-Based Sliding Mode Control Subjected to Measurement Noise and Disturbance," European Journal of Control, vol.58, pp.114-122, March 2021.
http://doi.org/10.1016/j.ejcon.2020.07.005
{kind=link}
![2 Outline Outline [1] Overview of “Proxy-based Sliding Mode](https://files.speakerdeck.com/presentations/06a7f4f5fe9943e7b6d78b00d0dcdf2b/slide_1.jpg){kind=link}
![3 [1] [1] Overview of Overview of Proxy-based Sliding Mode](https://files.speakerdeck.com/presentations/06a7f4f5fe9943e7b6d78b00d0dcdf2b/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
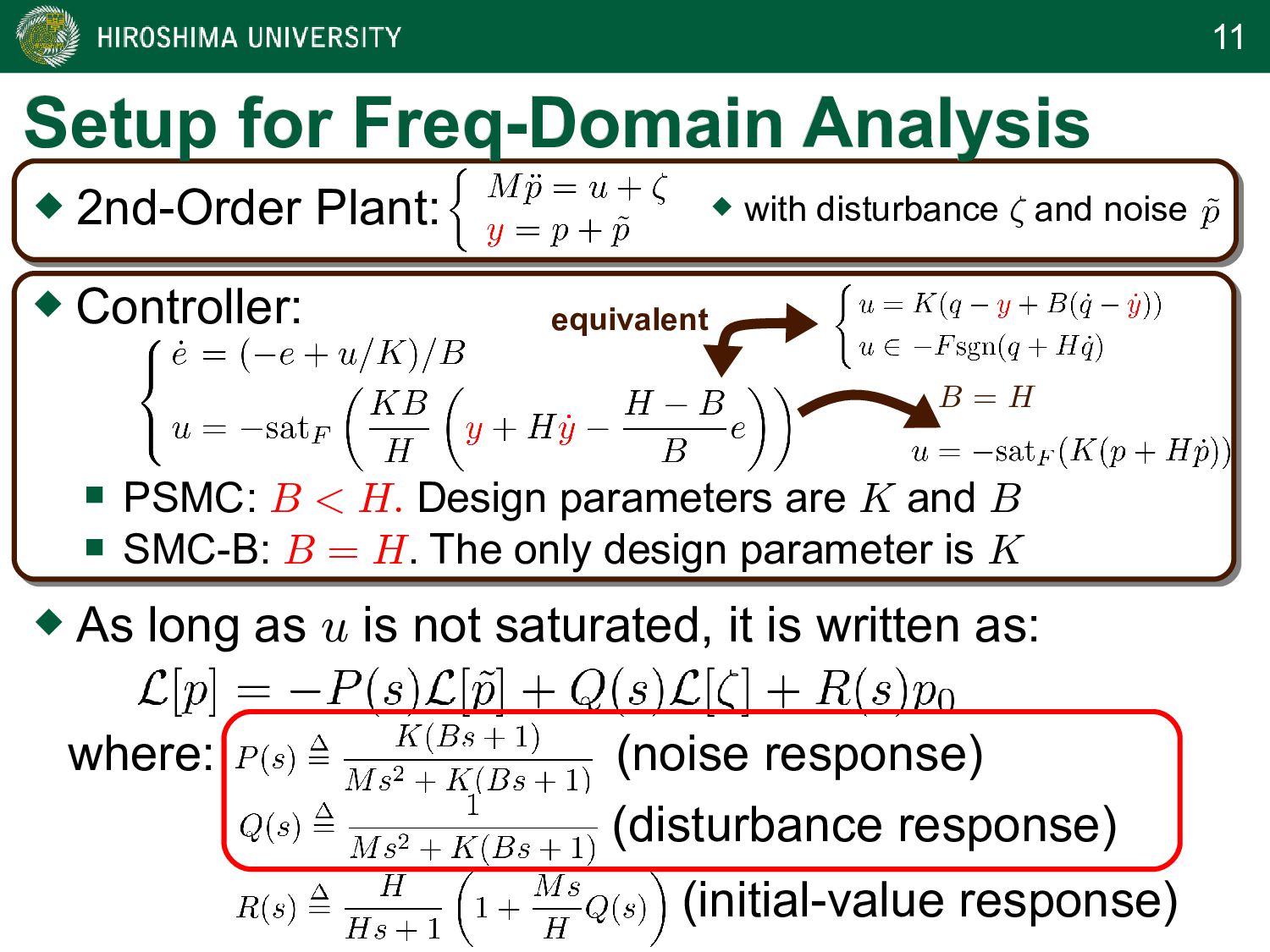
![10 [2] [2] Frequency Domain Properties Frequency Domain Properties [2]](https://files.speakerdeck.com/presentations/06a7f4f5fe9943e7b6d78b00d0dcdf2b/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![15 [3] [3] Time Domain Properties Time Domain Properties [3]](https://files.speakerdeck.com/presentations/06a7f4f5fe9943e7b6d78b00d0dcdf2b/slide_14.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![21 [4] [4] Conclusions Conclusions [4] [4] Conclusions Conclusions](https://files.speakerdeck.com/presentations/06a7f4f5fe9943e7b6d78b00d0dcdf2b/slide_20.jpg){kind=link}
{kind=link}