Set-Valued Algebraic Loop for Realization of for Realization of Sliding Mode Systems Sliding Mode Systems Department of Mechanical Systems Engineering Hiroshima University, Japan Ryo Kikuuwe https://home.hiroshima-u.ac.jp/kikuuwe/ https://www.youtube.com/user/kikuuwe/
Simulation of Coulomb Friction [2] Differential-Algebraic Relaxation for Simulation of Coulomb Friction [3] Differential-Algebraic Relaxation for Sliding Mode Control [4] Set-valued Algebraic Loop for Force Control of robots [5] Concluding Remarks
in this idea.) (How I arrived in this idea.) [1] [1] Implicit Integration Implicit Integration (How I arrived in this idea.) (How I arrived in this idea.)
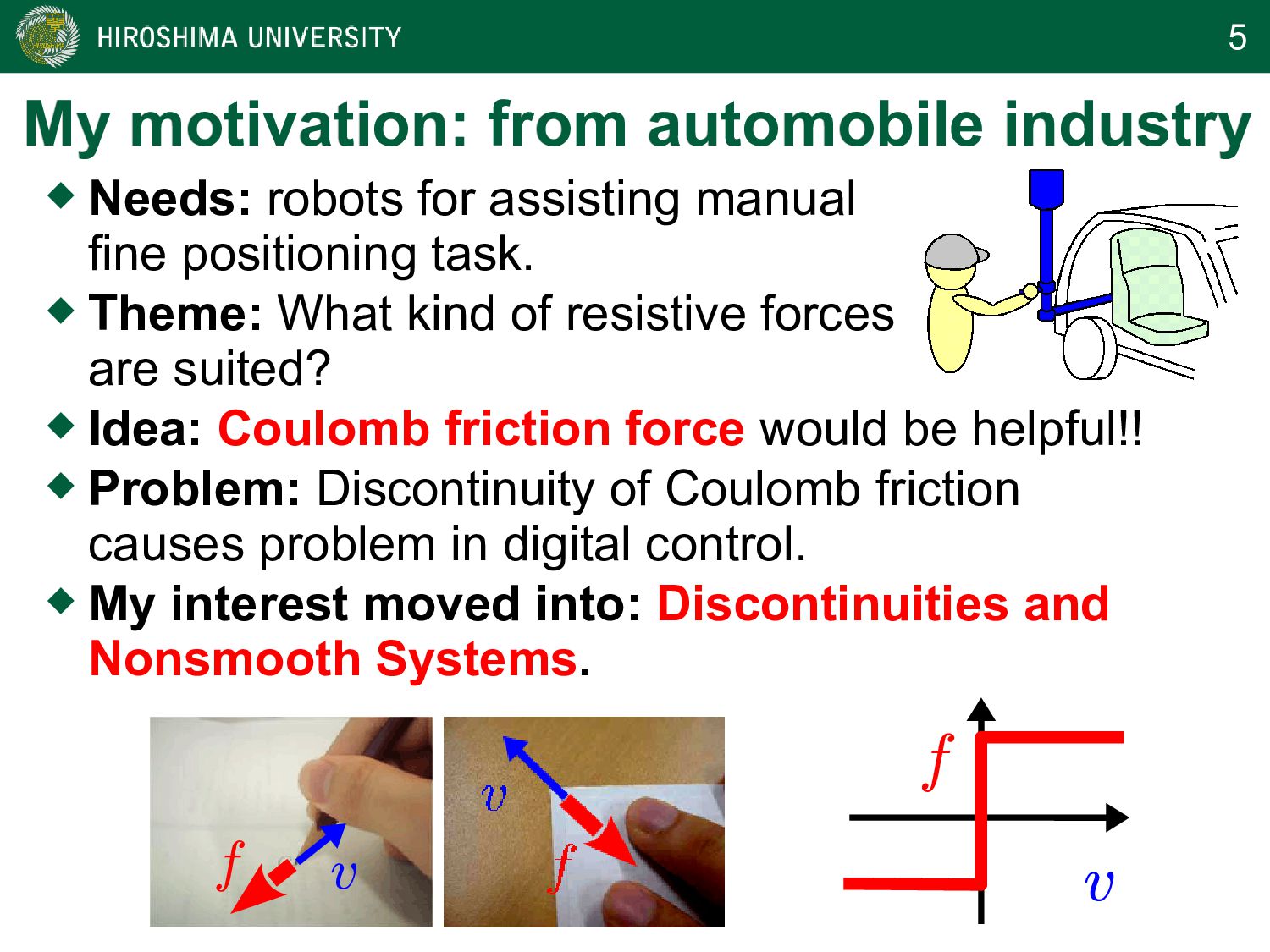
industry Needs: robots for assisting manual fine positioning task. Theme: What kind of resistive forces are suited? f v Idea: Coulomb friction force would be helpful!! Problem: Discontinuity of Coulomb friction causes problem in digital control. My interest moved into: Discontinuities and Nonsmooth Systems.
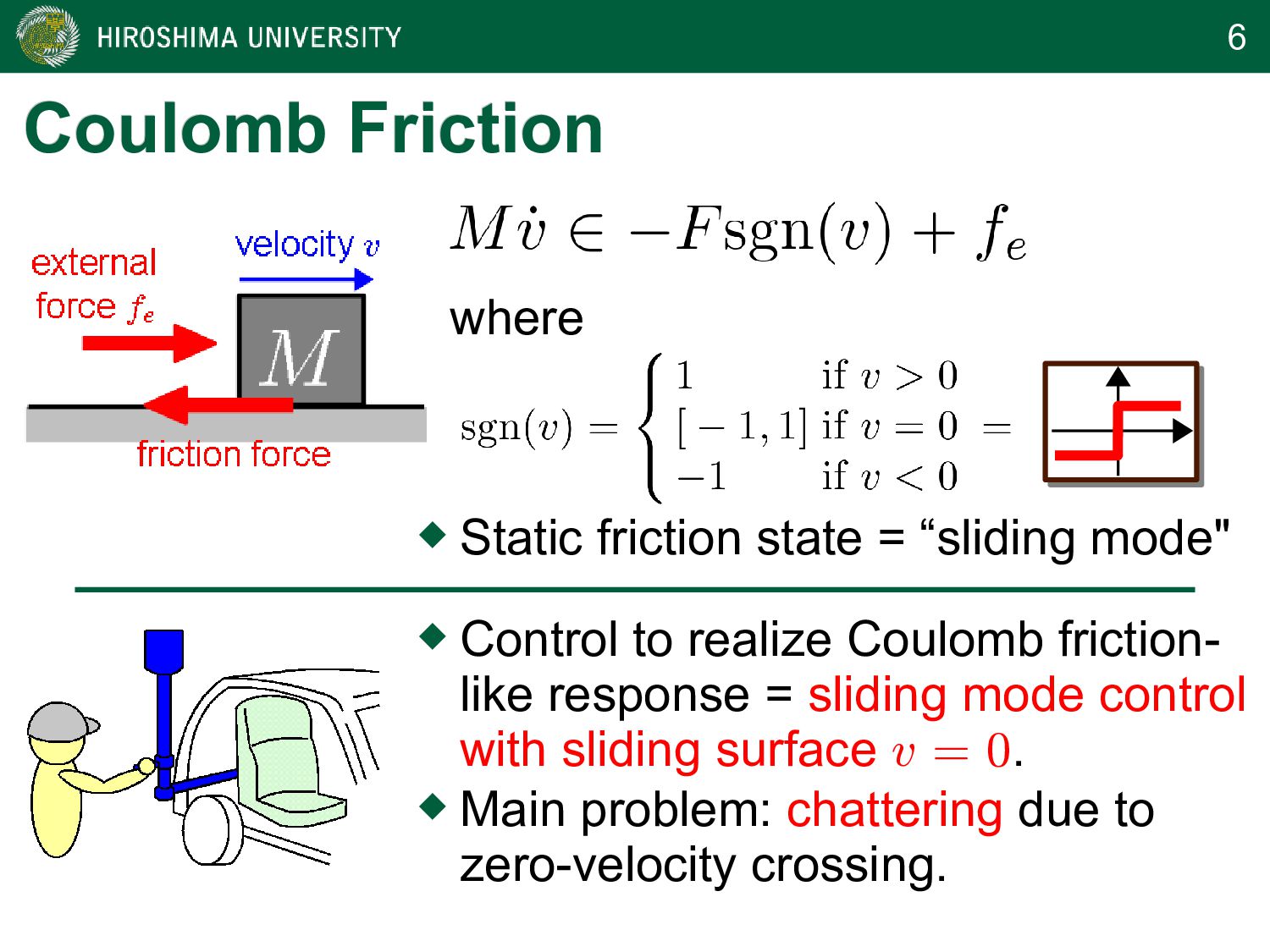
= “sliding mode" Control to realize Coulomb friction- like response = sliding mode control with sliding surface v = 0. Main problem: chattering due to zero-velocity crossing.
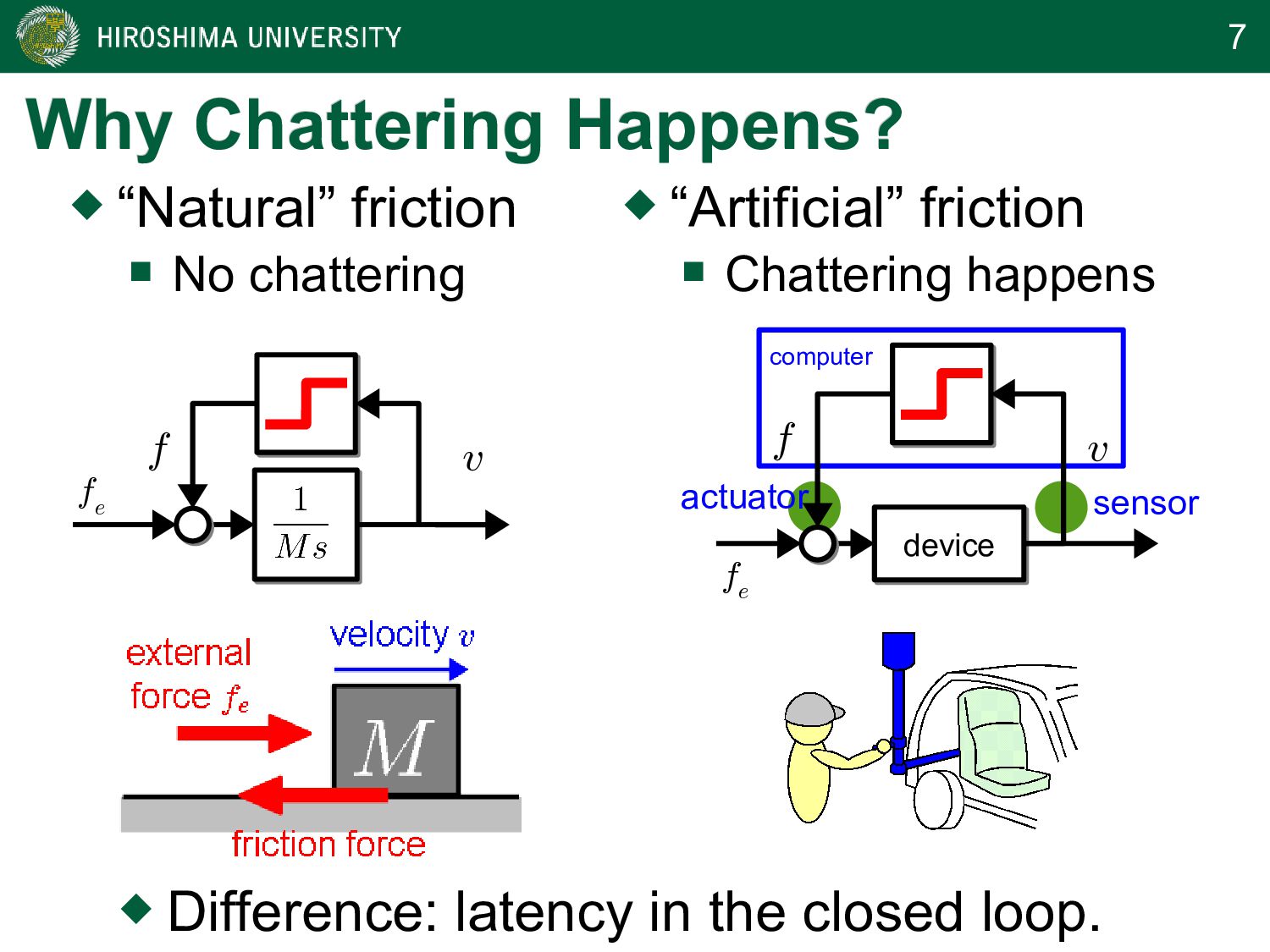
No chattering “Artificial” friction Chattering happens Difference: latency in the closed loop. f v f e device device f v computer f e actuator sensor
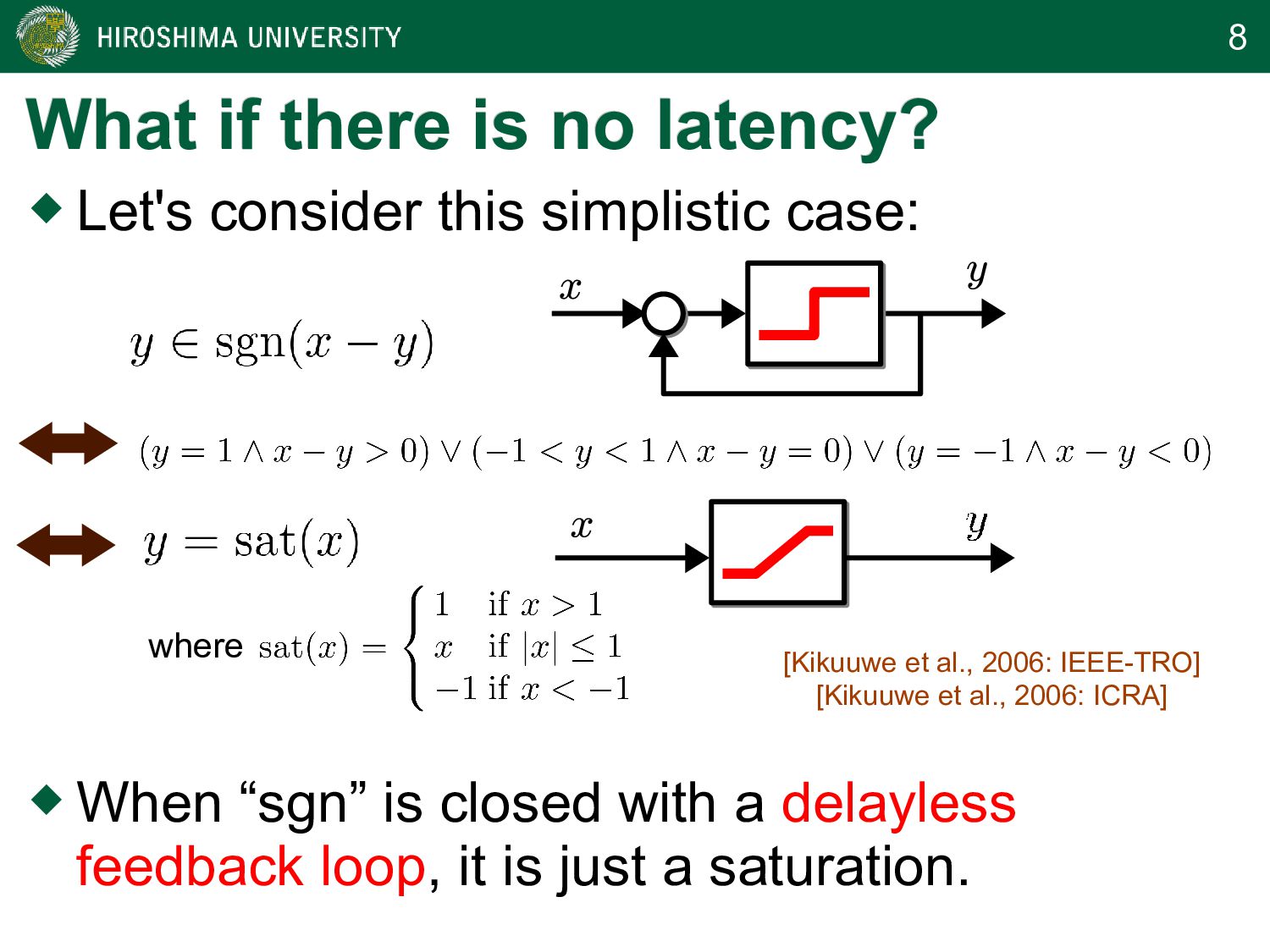
is no latency? Let's consider this simplistic case: When “sgn” is closed with a delayless feedback loop, it is just a saturation. [Kikuuwe et al., 2006: IEEE-TRO] [Kikuuwe et al., 2006: ICRA] where
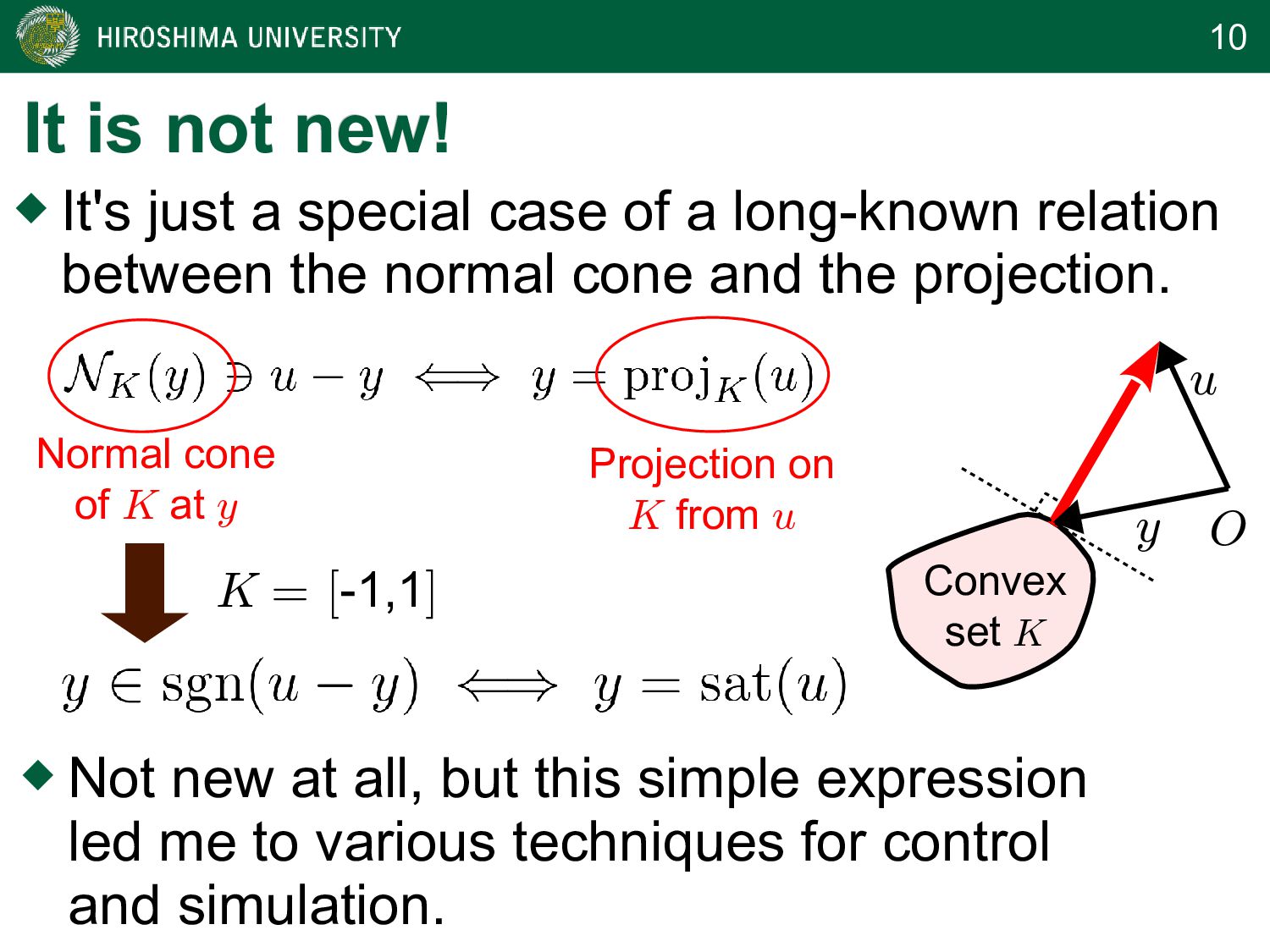
cone of K at y Projection on K from u K = [-1,1] Not new at all, but this simple expression led me to various techniques for control and simulation. y O Convex set K u It's just a special case of a long-known relation between the normal cone and the projection.
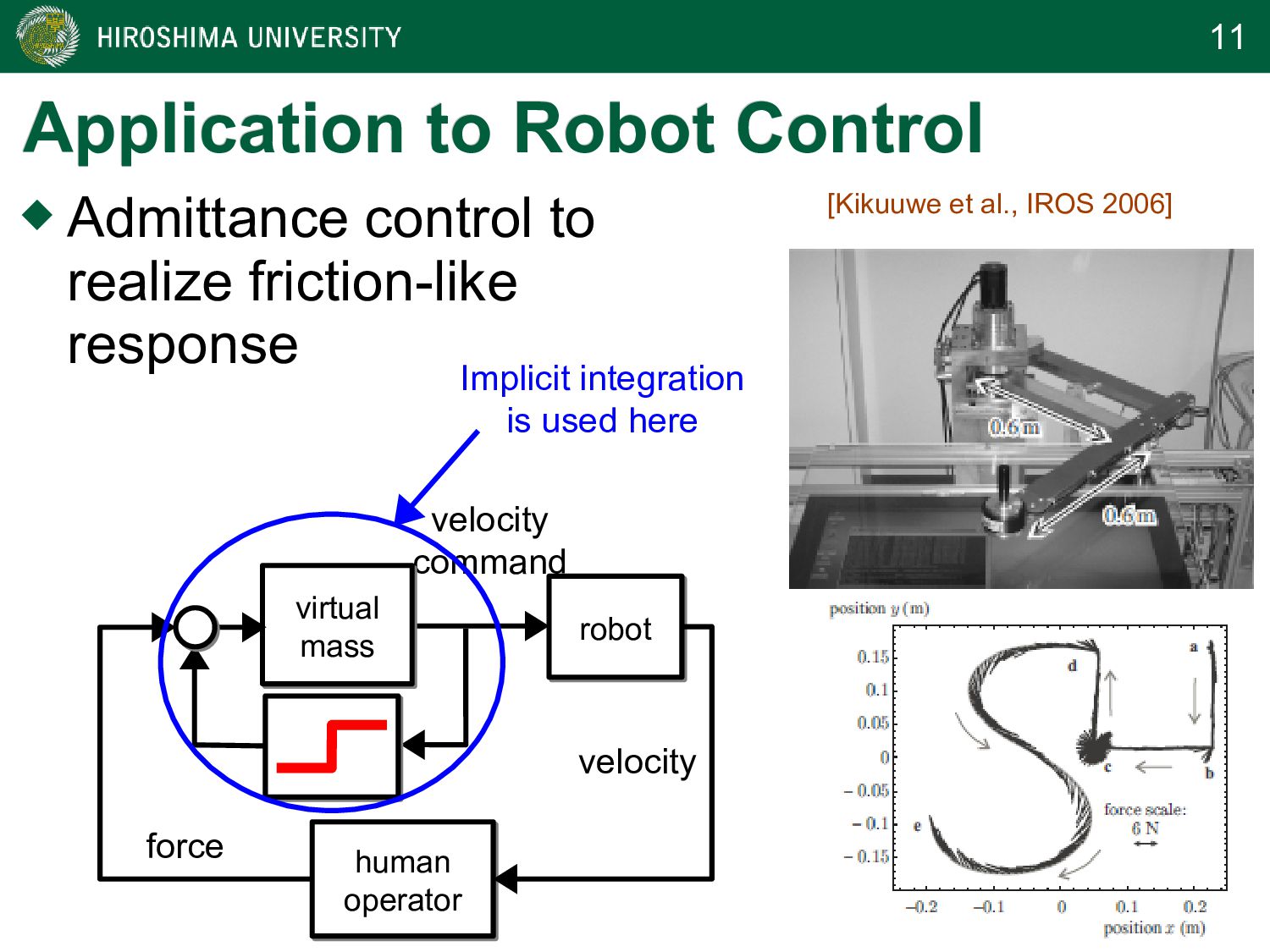
et al., IROS 2006] robot robot velocity command force virtual mass virtual mass velocity human operator human operator Implicit integration is used here Admittance control to realize friction-like response
I was cited … An interesting contribution is in Kikuuwe et al. (2005) where the implicit discretization of Coulomb friction is rediscovered and extended to more sophisticated multivalued nonsmooth models (equations (14a)-(14c) in Kikuuwe et al., 2005 exactly correspond to the procedure described in Fig. 1.17) ... Acary & Brogliato: “Numerical Methods for Nonsmooth Dynamical Systems”, Springer, 2008. (At the time of 2005, I wasn't aware of Acary & Brogliato's works.) V. Acary B. Brogliato
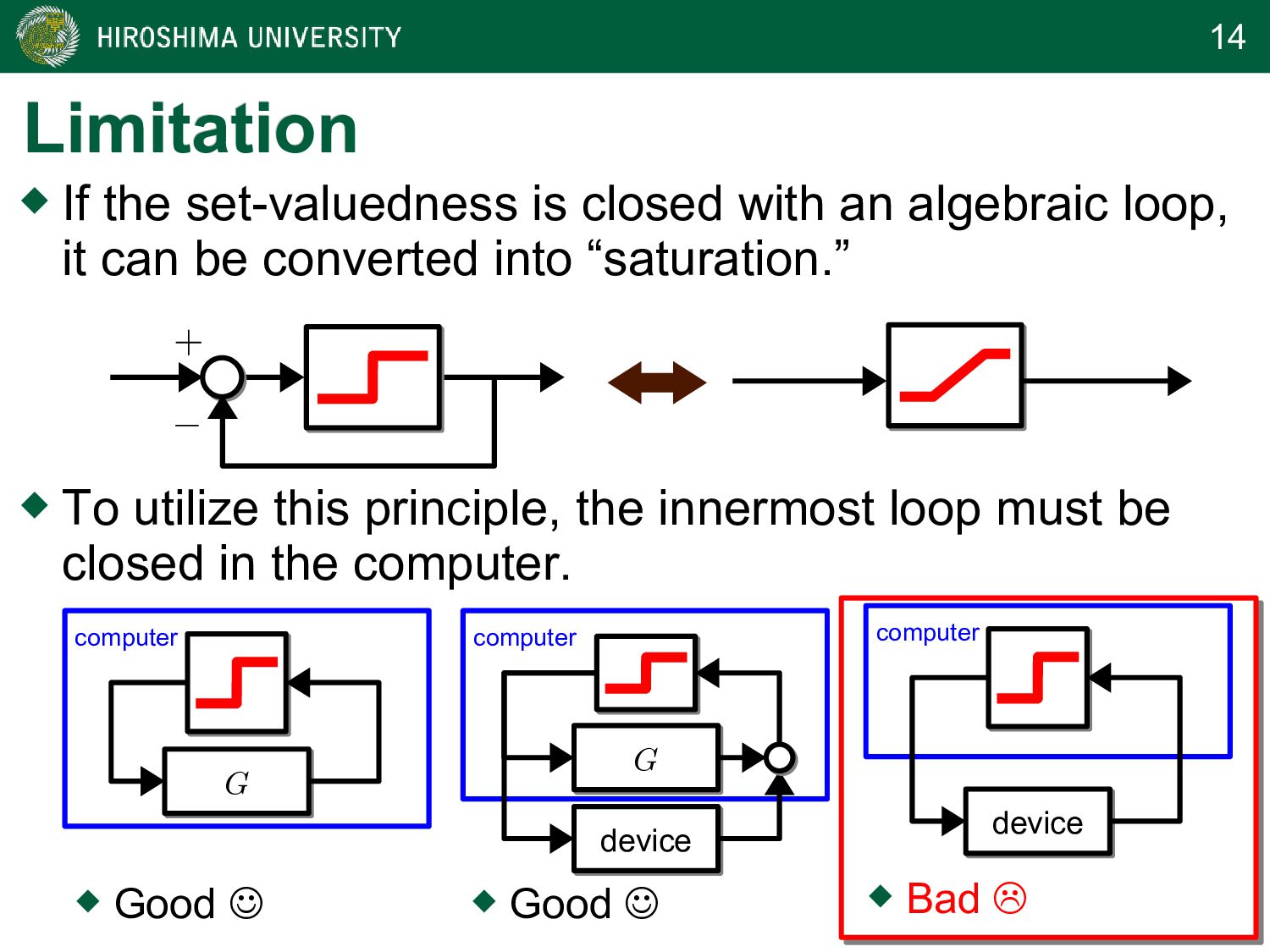
an algebraic loop, it can be converted into “saturation.” + ¡ To utilize this principle, the innermost loop must be closed in the computer. G G device device G G computer computer device device computer Good J Bad L Good J
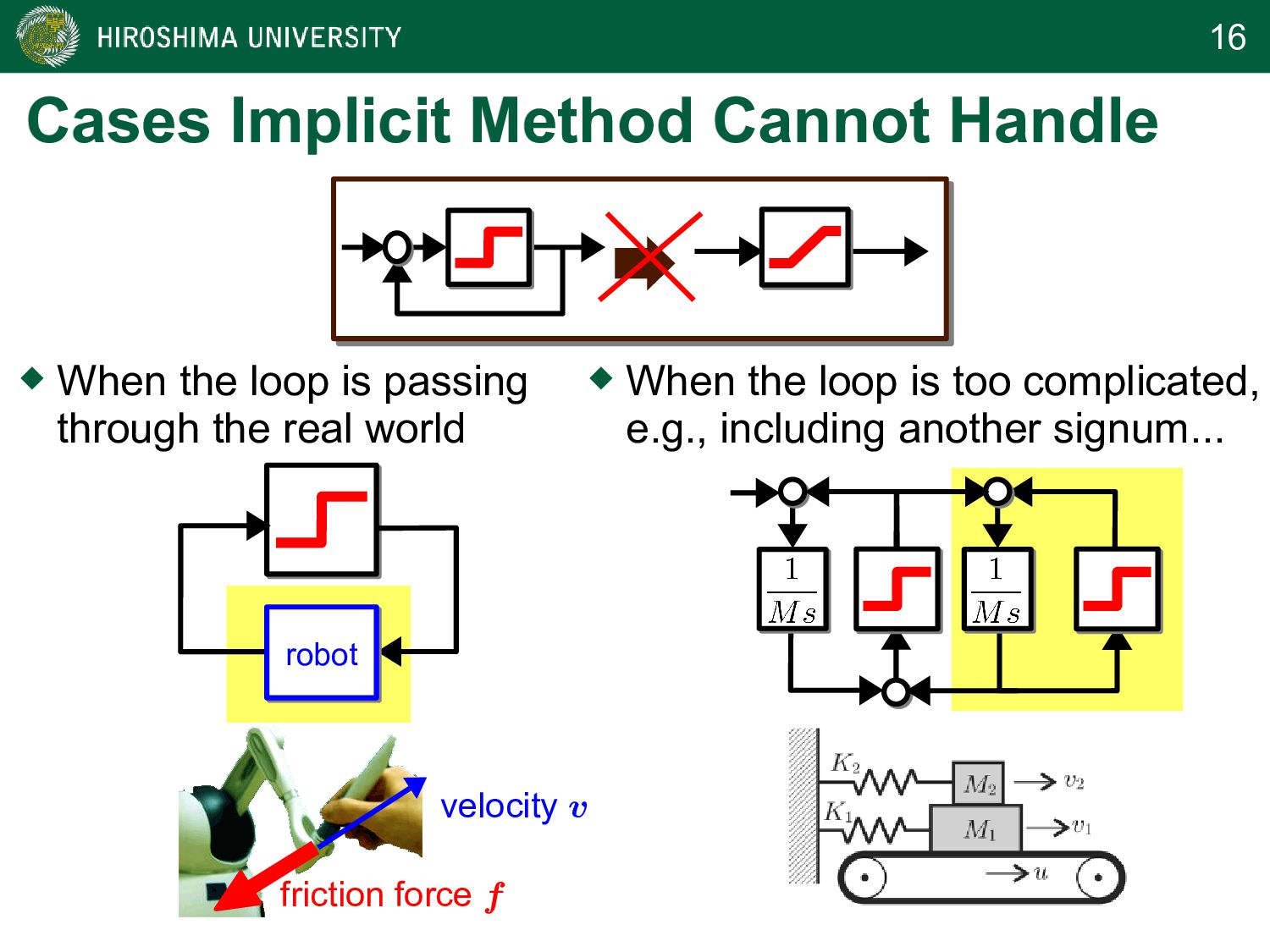
Handle Cases Implicit Method Cannot Handle When the loop is passing through the real world When the loop is too complicated, e.g., including another signum... robot
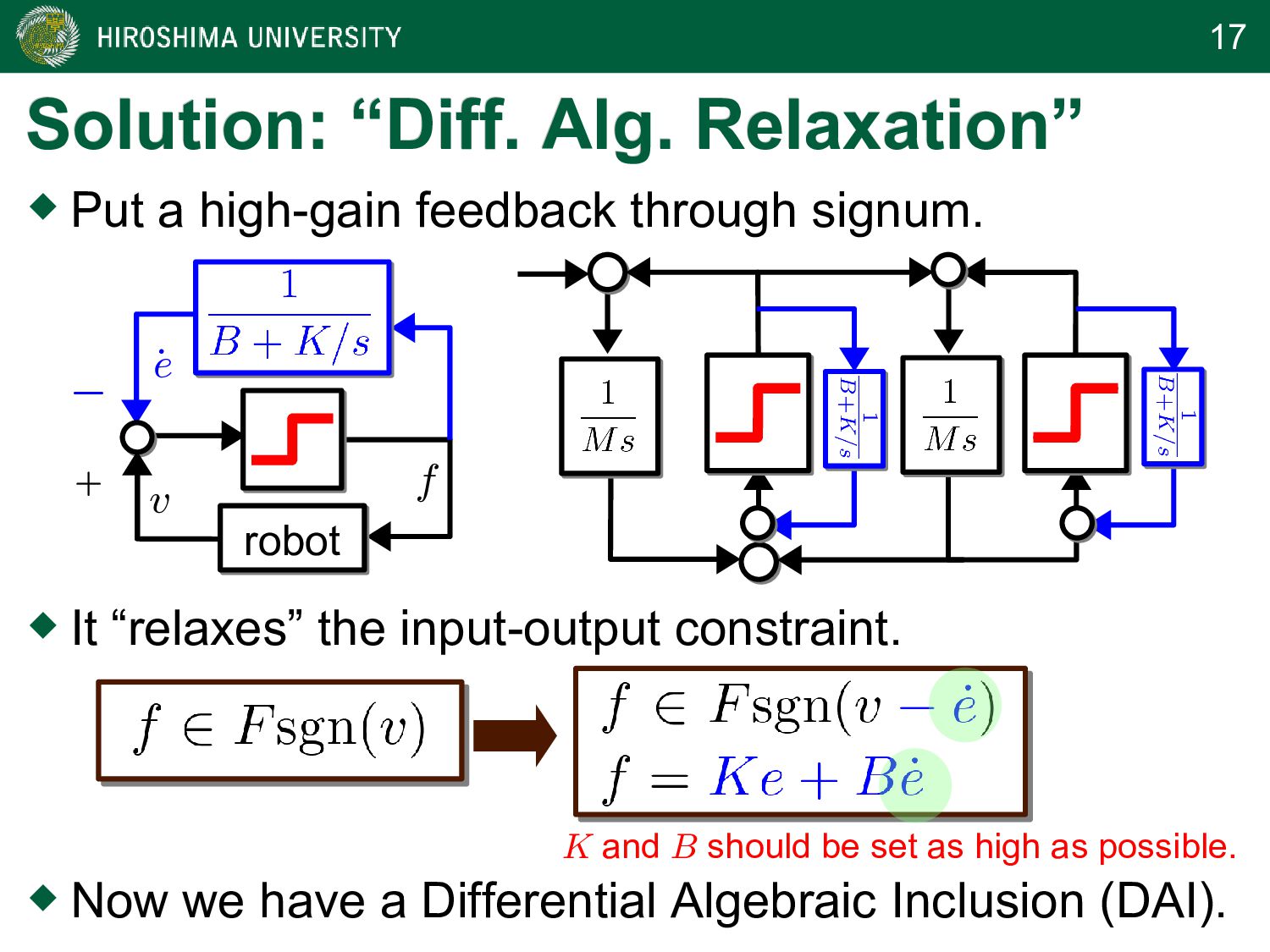
Put a high-gain feedback through signum. robot f v e _ ¡ + It “relaxes” the input-output constraint. K and B should be set as high as possible. Now we have a Differential Algebraic Inclusion (DAI).
disp. e “Relaxed” system velocity friction force “Original” system Friction acts on a massless “proxy” object. The “proxy” and the device are connected through a stiff spring-damper element. Friction acts on the device friction force f velocity v friction force f velocity v ¡ e _ velocity friction force
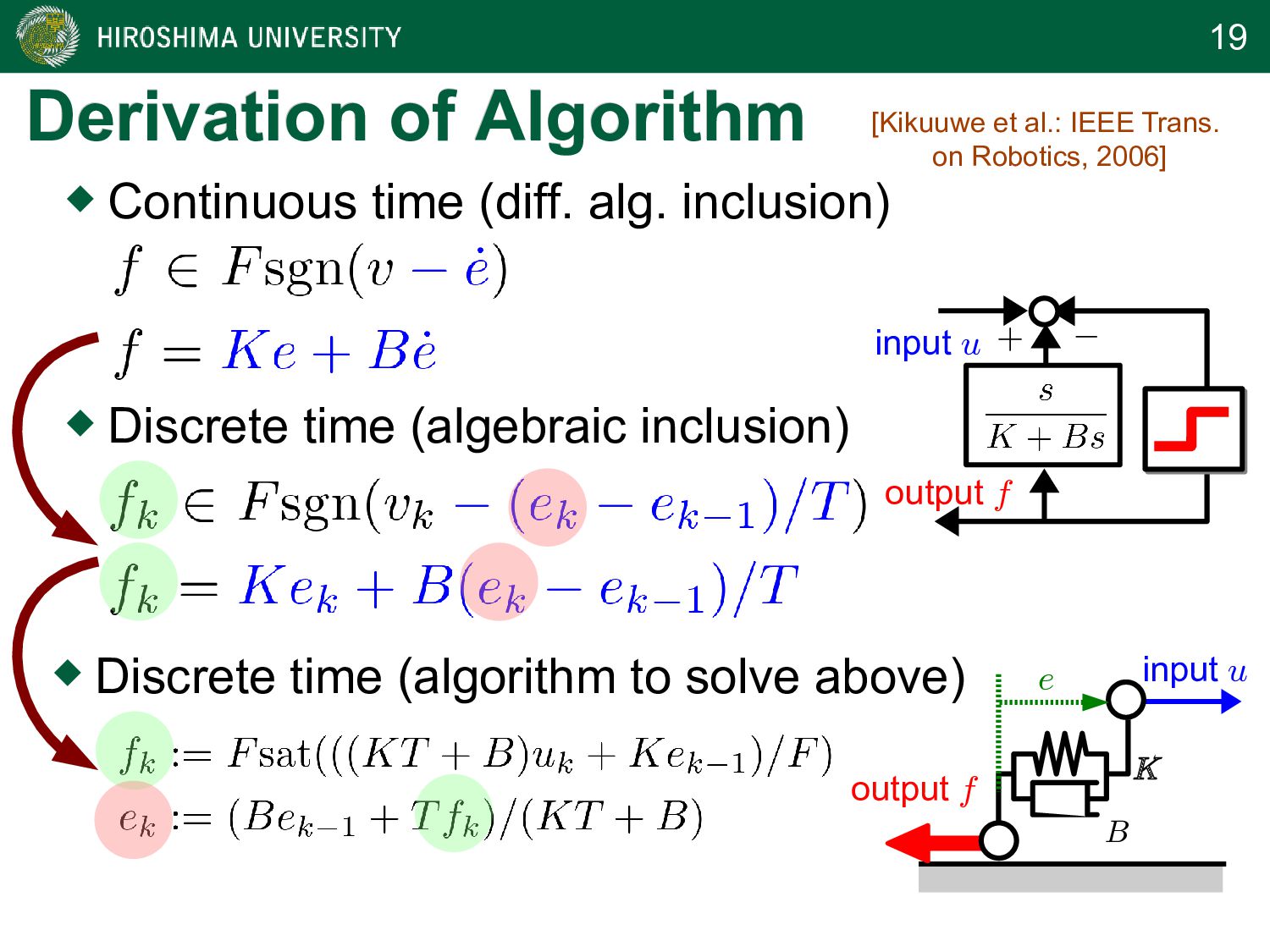
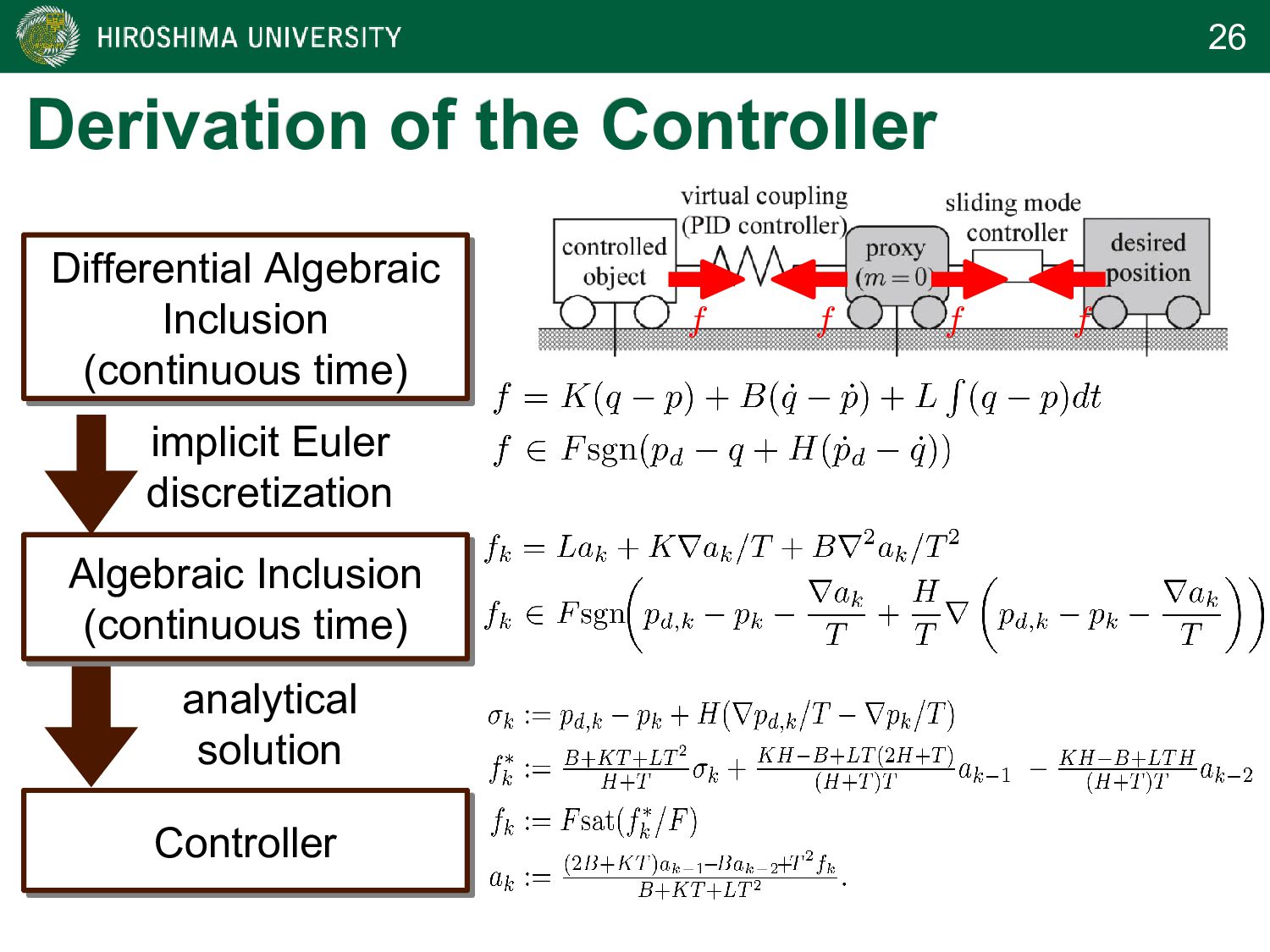
Algorithm Derivation of Algorithm Continuous time (diff. alg. inclusion) Discrete time (algorithm to solve above) Discrete time (algebraic inclusion) [Kikuuwe et al.: IEEE Trans. on Robotics, 2006] output f input u ¡ +
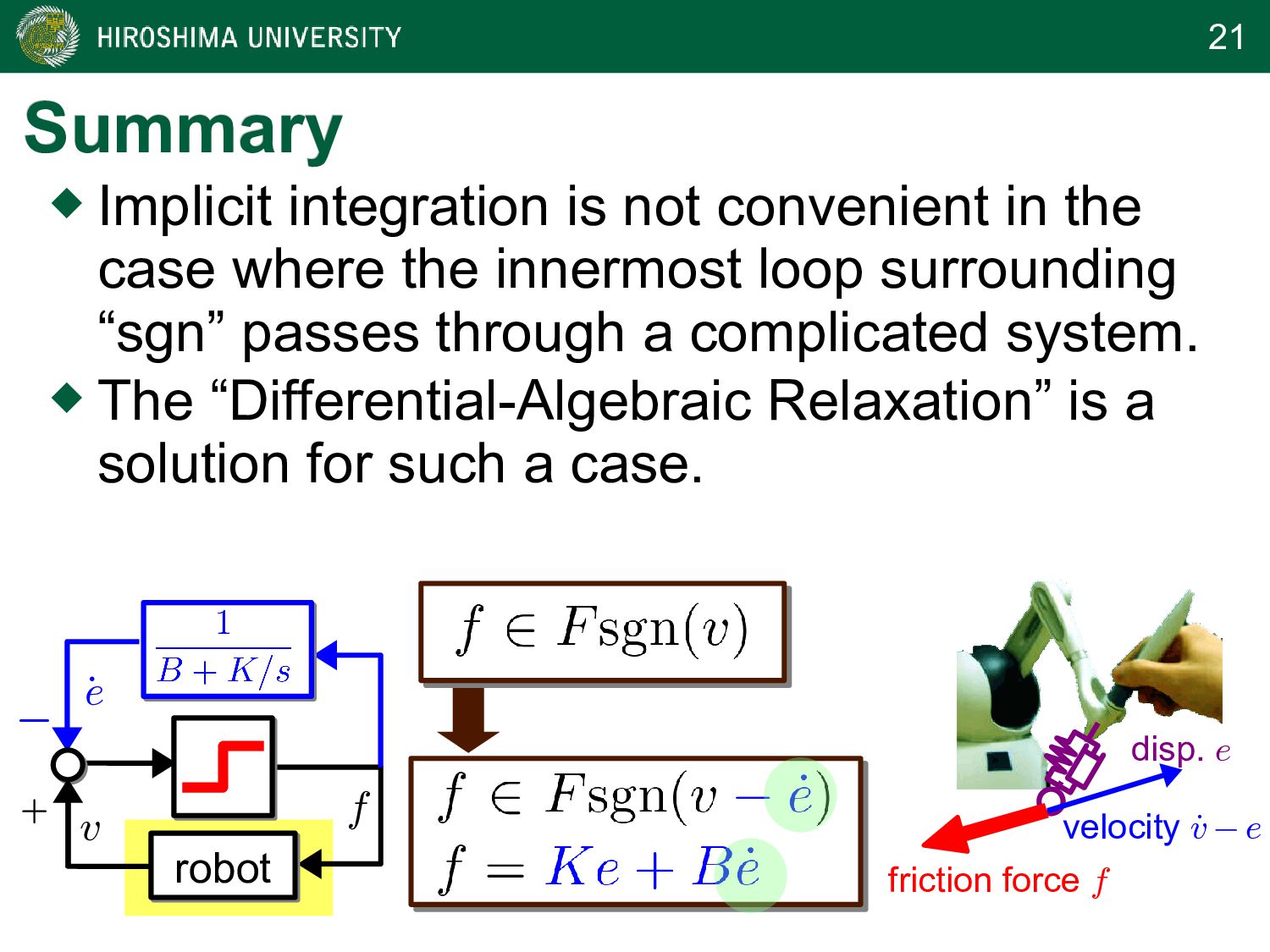
the case where the innermost loop surrounding “sgn” passes through a complicated system. The “Differential-Algebraic Relaxation” is a solution for such a case. robot f v e _ ¡ + disp. e friction force f velocity v ¡ e _
for Sliding Mode Control Sliding Mode Control [3] [3] Differential Algebraic Relaxation Differential Algebraic Relaxation for for Sliding Mode Control Sliding Mode Control
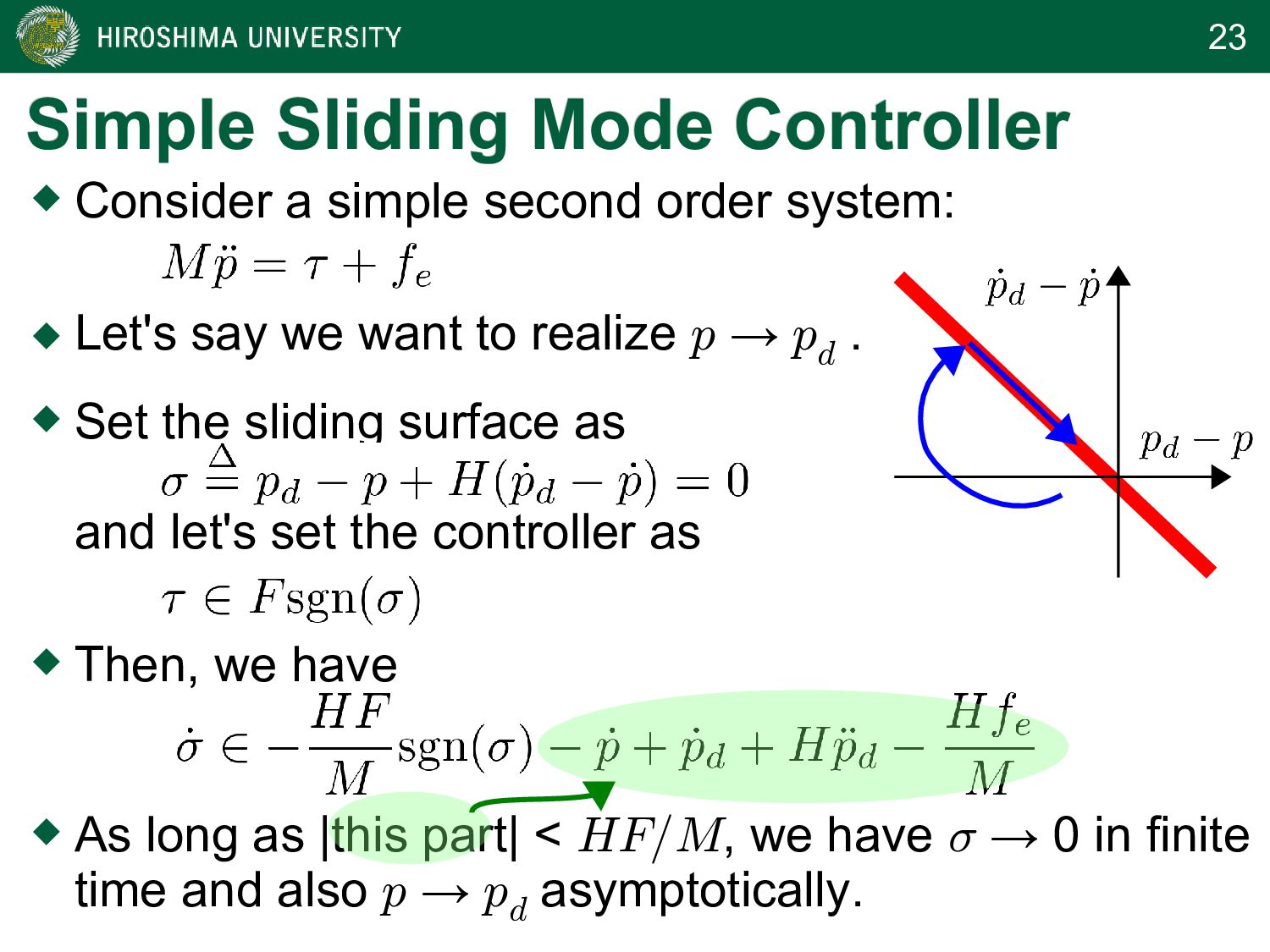
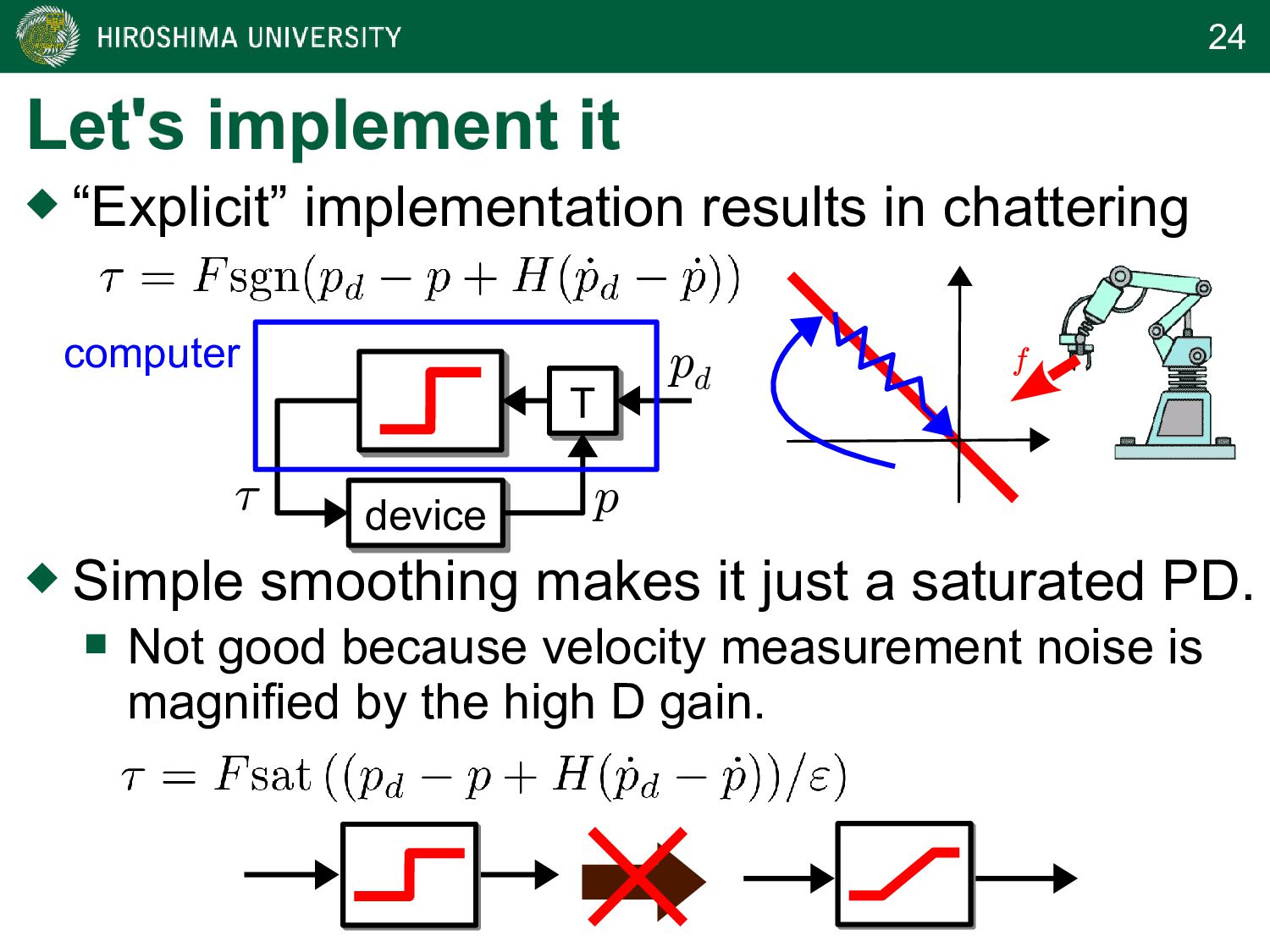
say we want to realize p → p d . Set the sliding surface as and let's set the controller as Then, we have As long as |this part| < HF/M, we have ¾ → 0 in finite time and also p → p d asymptotically. Simple Sliding Mode Controller Simple Sliding Mode Controller
results in chattering Simple smoothing makes it just a saturated PD. Not good because velocity measurement noise is magnified by the high D gain. T T device device ¿ p p d computer
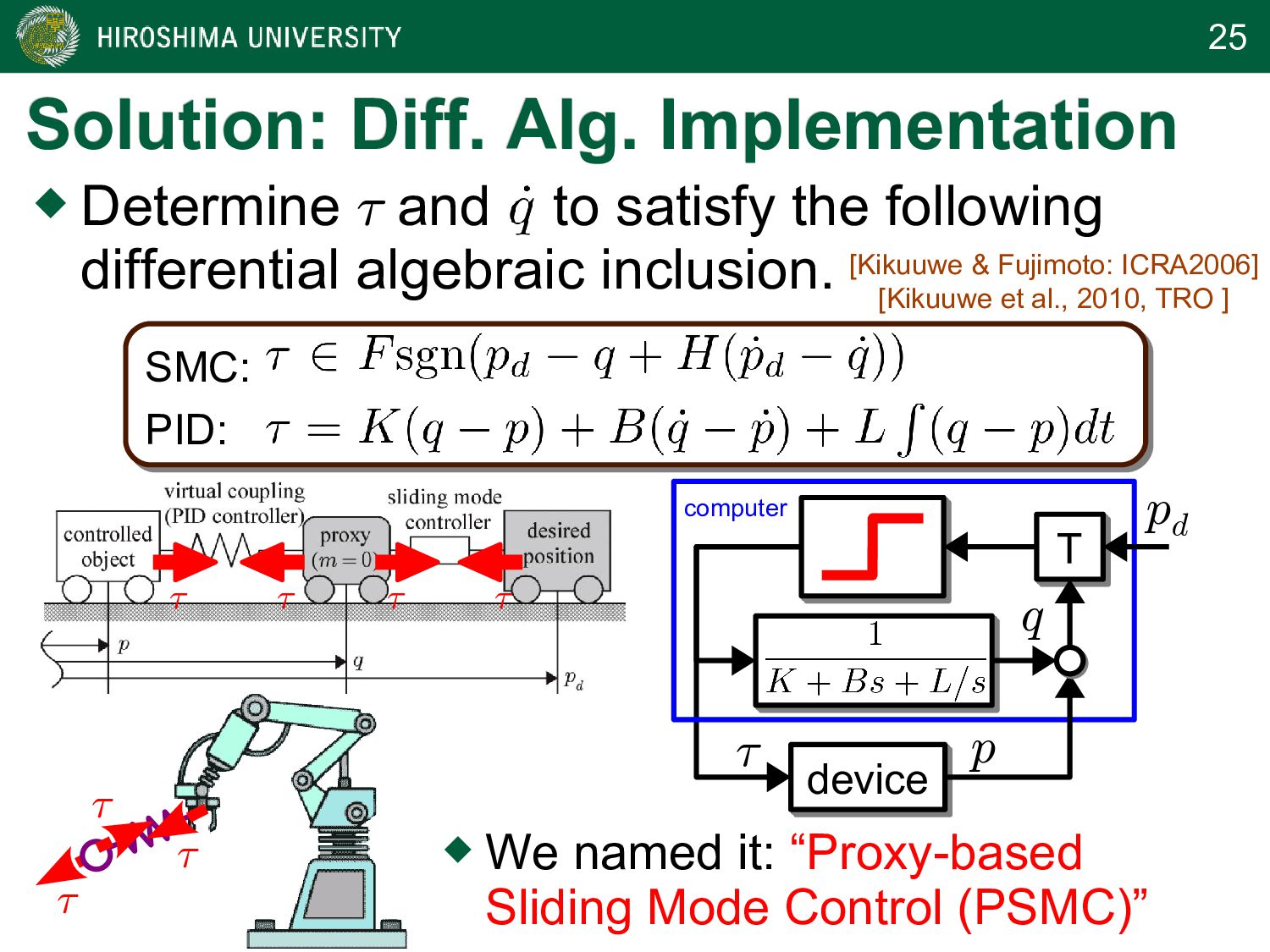
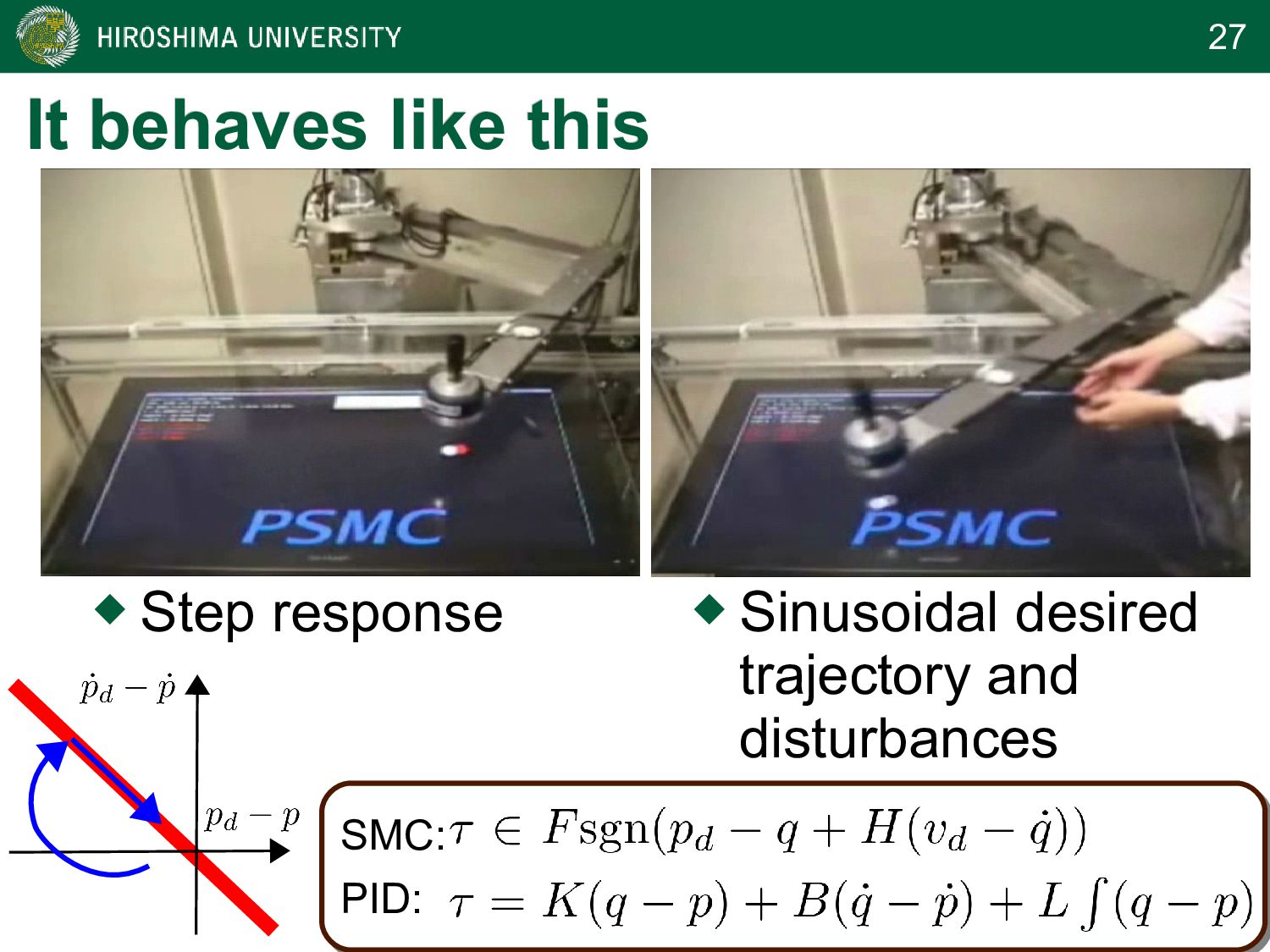
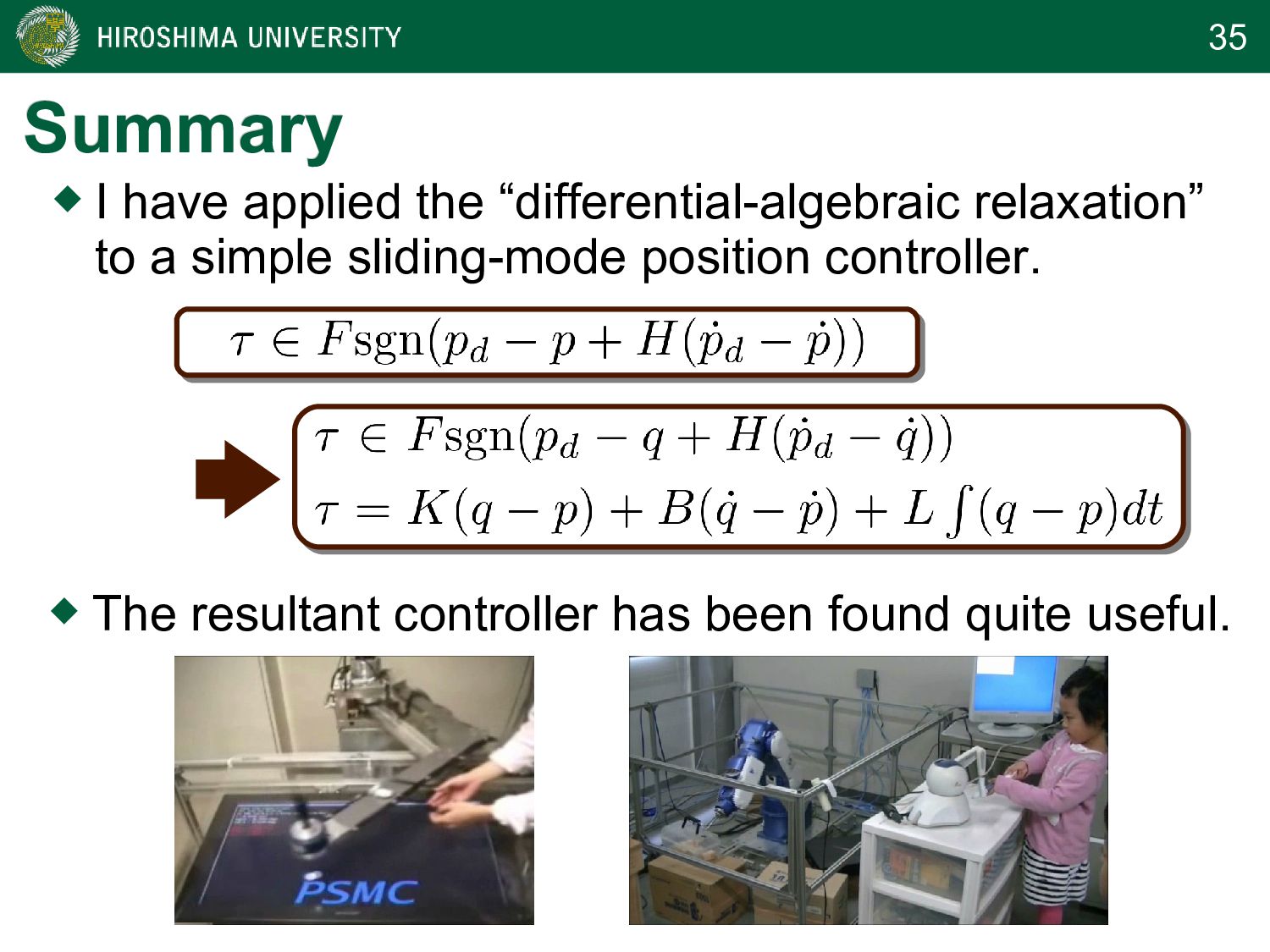
¿ ¿ [Kikuuwe & Fujimoto: ICRA2006] [Kikuuwe et al., 2010, TRO ] PID: SMC: ¿ ¿ ¿ ¿ Determine ¿ and to satisfy the following differential algebraic inclusion. T T computer device device ¿ p p d q We named it: “Proxy-based Sliding Mode Control (PSMC)”
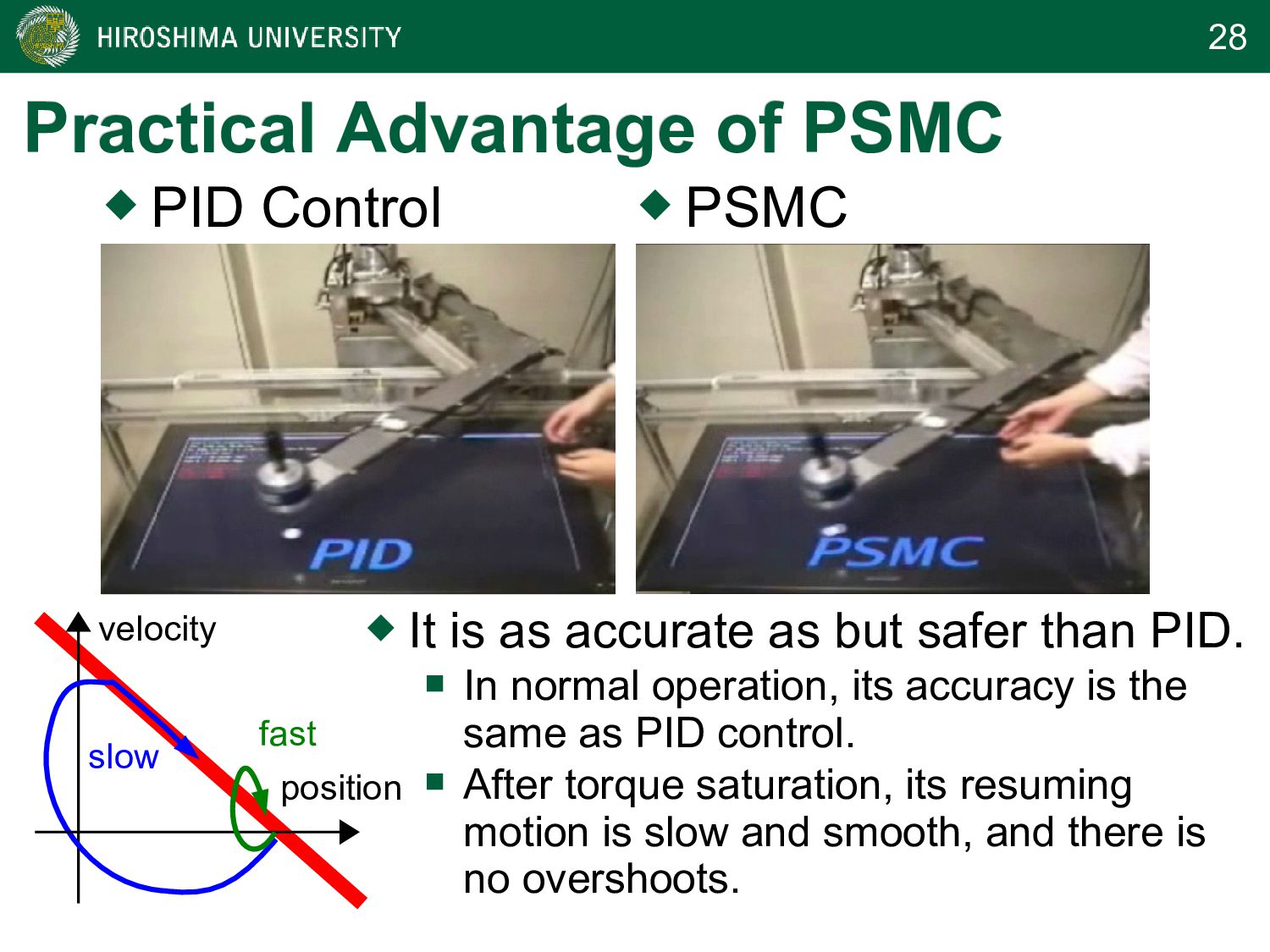
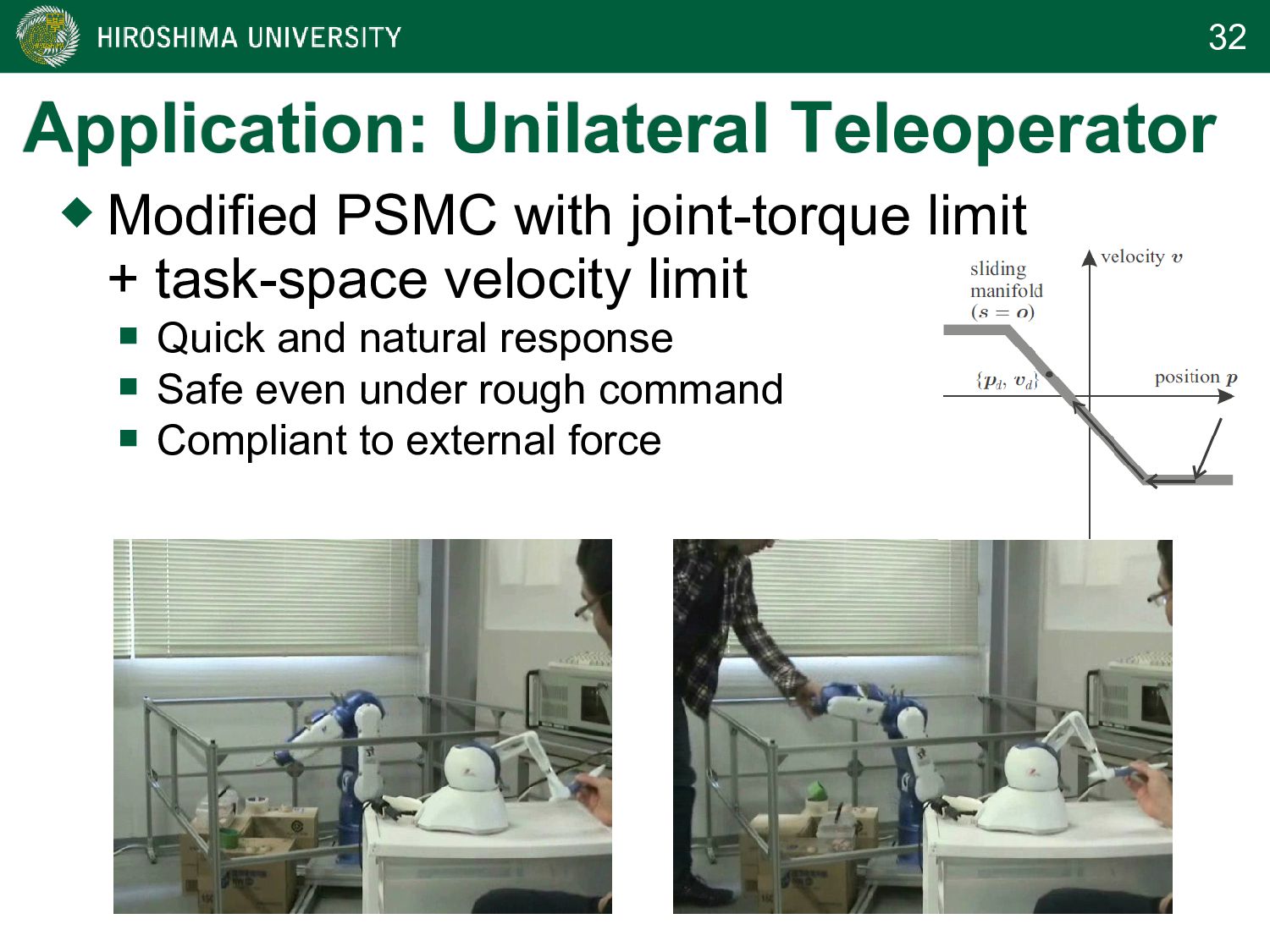
PID Control PSMC It is as accurate as but safer than PID. In normal operation, its accuracy is the same as PID control. After torque saturation, its resuming motion is slow and smooth, and there is no overshoots. fast slow position velocity
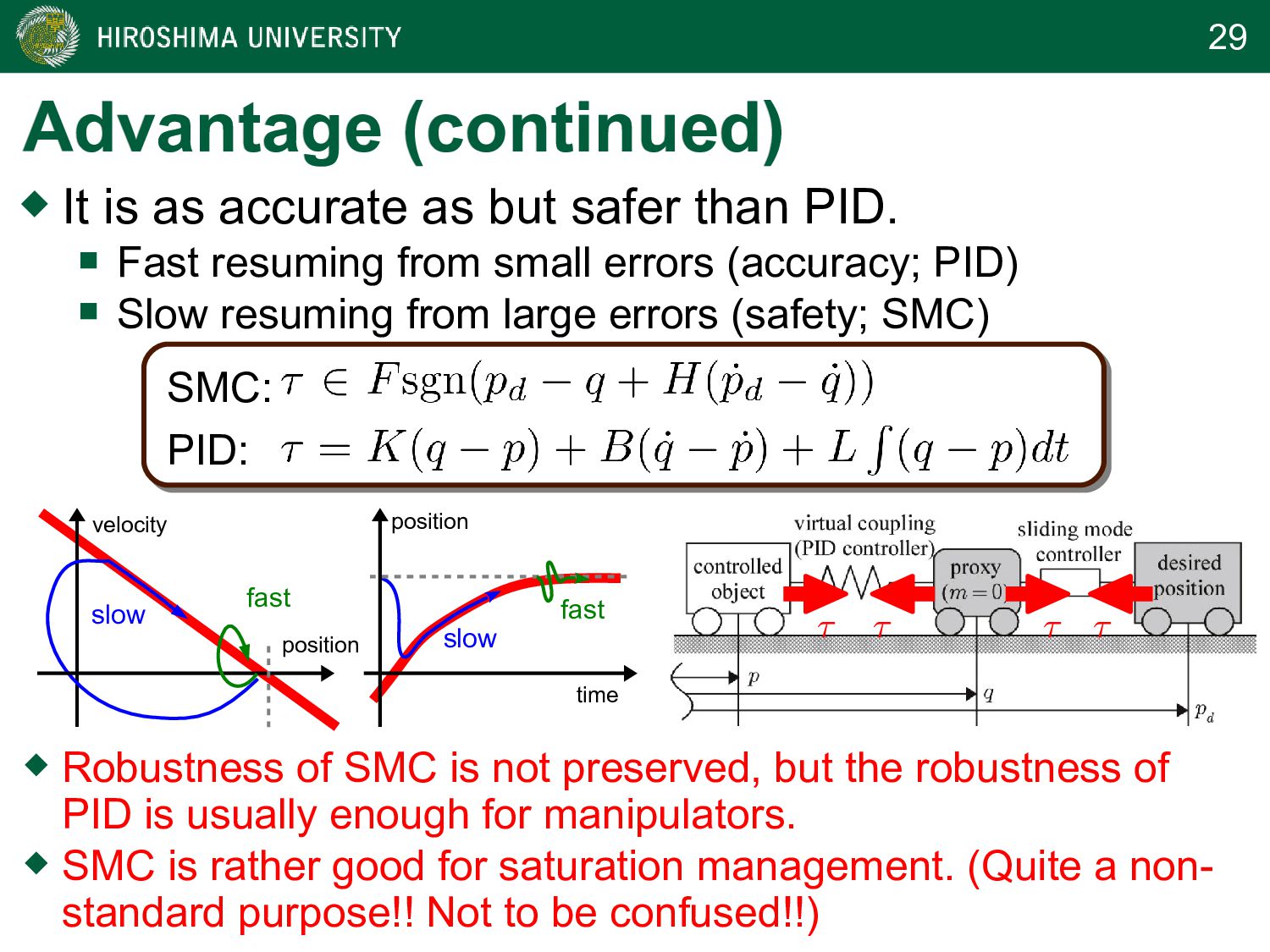
as but safer than PID. Fast resuming from small errors (accuracy; PID) Slow resuming from large errors (safety; SMC) fast slow position velocity time position slow fast PID: SMC: ¿ ¿ ¿ ¿ Robustness of SMC is not preserved, but the robustness of PID is usually enough for manipulators. SMC is rather good for saturation management. (Quite a non- standard purpose!! Not to be confused!!)
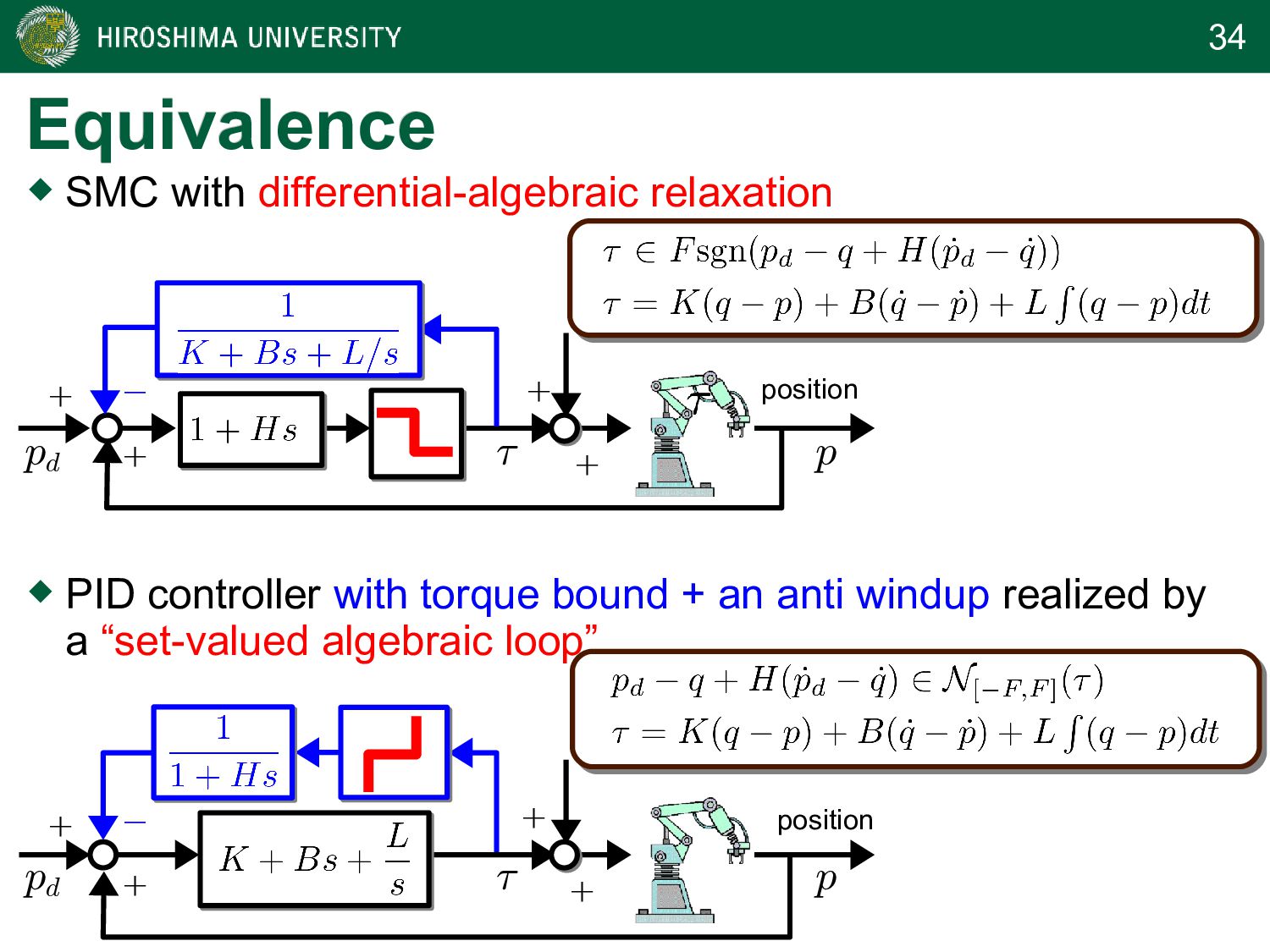
an anti windup realized by a “set-valued algebraic loop” position + + + - position + + SMC with differential-algebraic relaxation ¿ p pd + ¿ p pd + - +
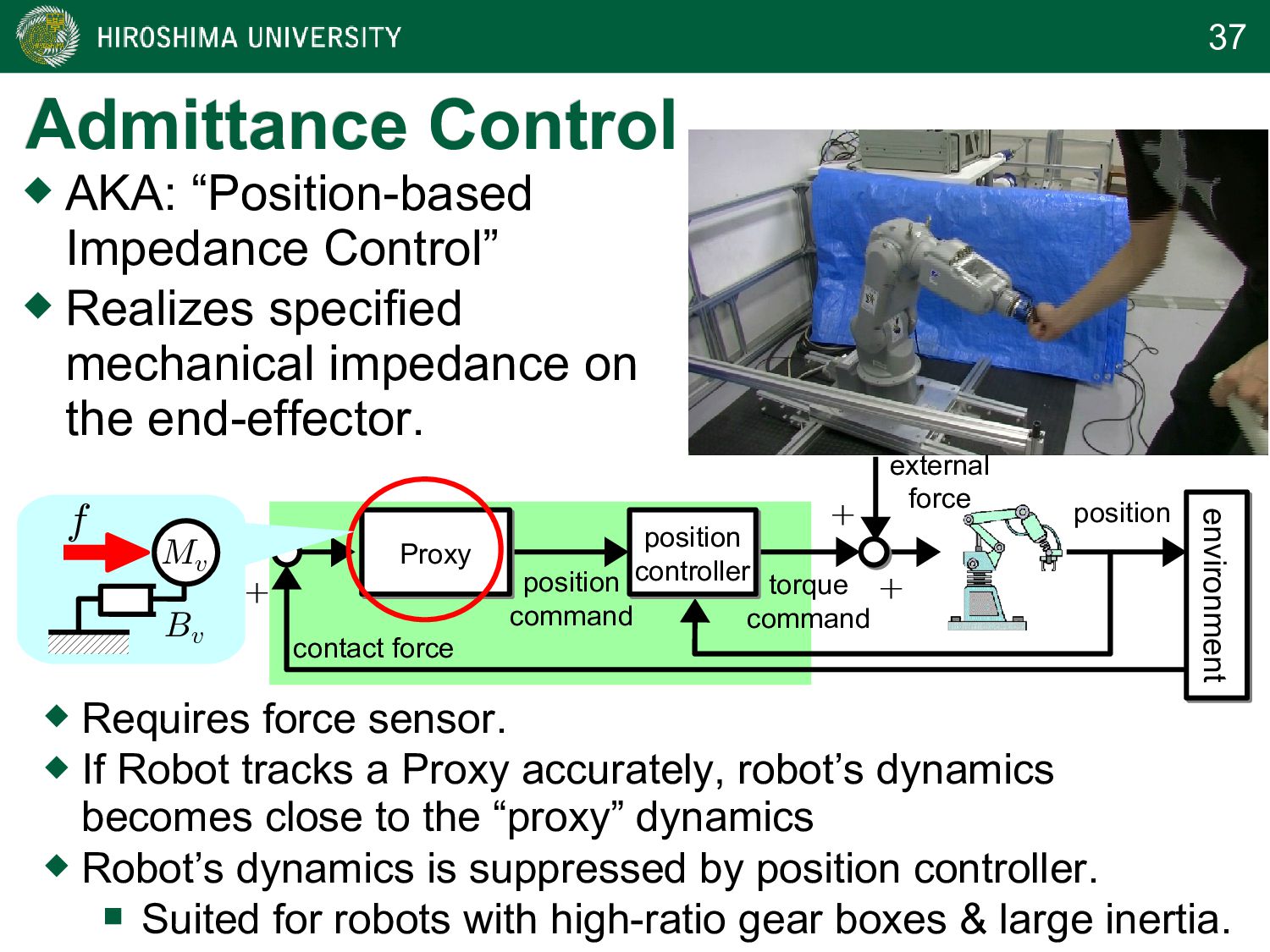
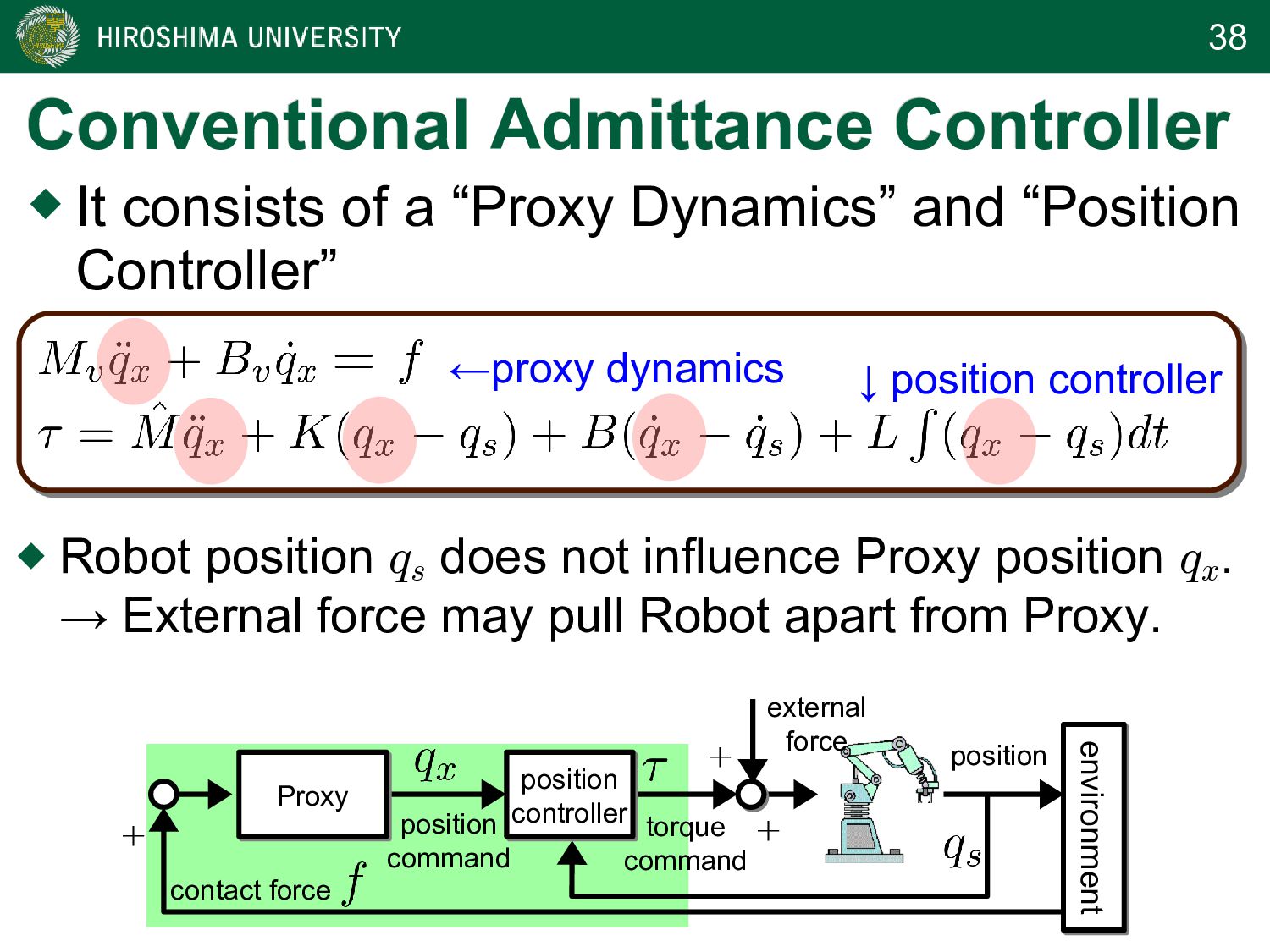
position controller torque command Proxy Proxy external force + + + Admittance Control Admittance Control AKA: “Position-based Impedance Control” Realizes specified mechanical impedance on the end-effector. f Mv Bv Requires force sensor. If Robot tracks a Proxy accurately, robot’s dynamics becomes close to the “proxy” dynamics Robot’s dynamics is suppressed by position controller. Suited for robots with high-ratio gear boxes & large inertia.
of a “Proxy Dynamics” and “Position Controller” Robot position qs does not influence Proxy position qx . → External force may pull Robot apart from Proxy. environment environment position contact force position command position controller position controller torque command Proxy Proxy external force + + + ↓ position controller ←proxy dynamics =
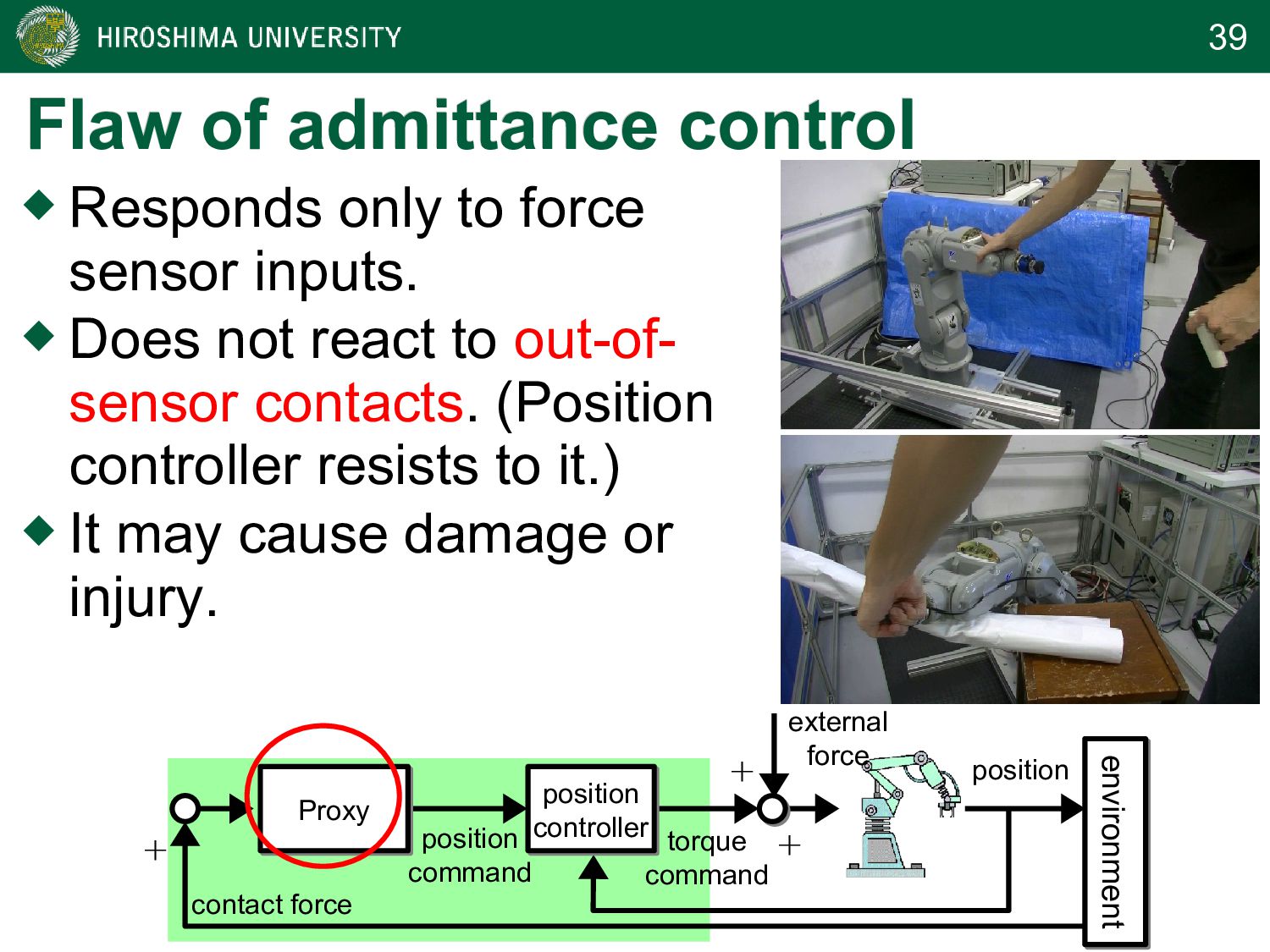
Responds only to force sensor inputs. Does not react to out-of- sensor contacts. (Position controller resists to it.) It may cause damage or injury. environment environment position contact force position command position controller position controller torque command Proxy Proxy external force + + +
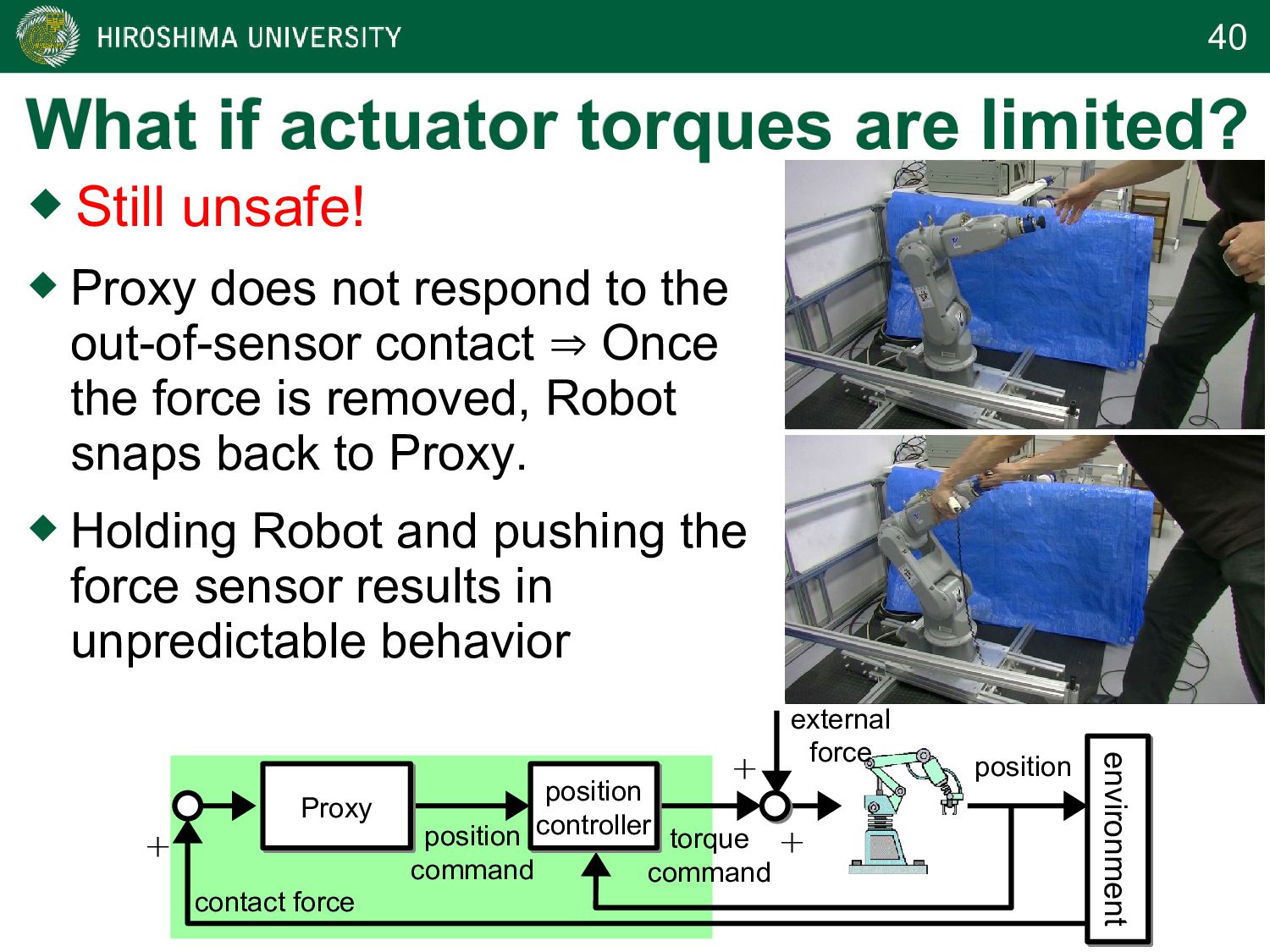
torques are limited? Still unsafe! Proxy does not respond to the out-of-sensor contact Once ⇒ the force is removed, Robot snaps back to Proxy. Holding Robot and pushing the force sensor results in unpredictable behavior environment environment position contact force position command position controller position controller torque command Proxy Proxy external force + + +
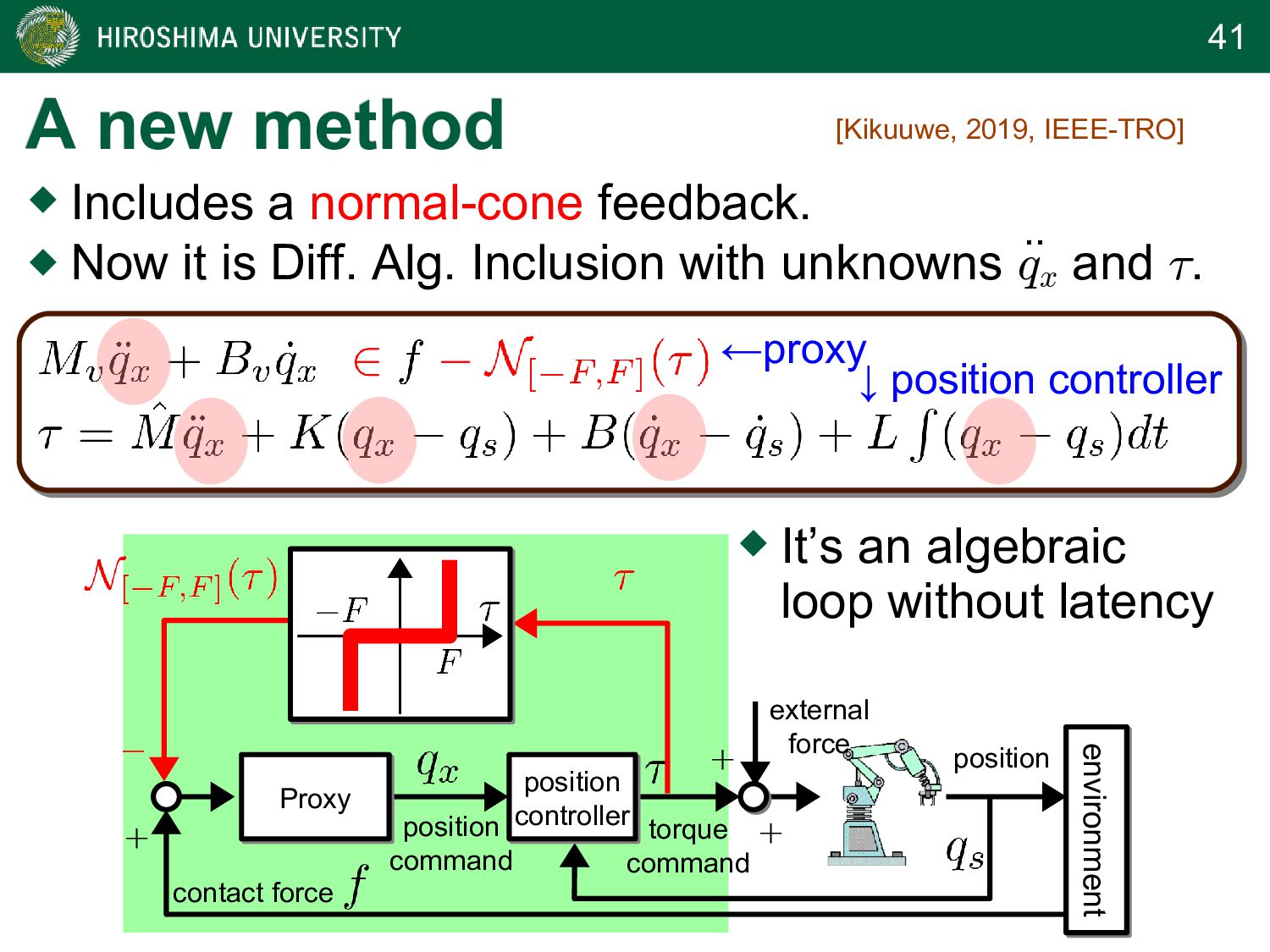
normal-cone feedback. Now it is Diff. Alg. Inclusion with unknowns qx and ¿. It’s an algebraic loop without latency ←proxy .. ↓ position controller environment environment position contact force position command position controller position controller torque command Proxy Proxy external force + + + - [Kikuuwe, 2019, IEEE-TRO]
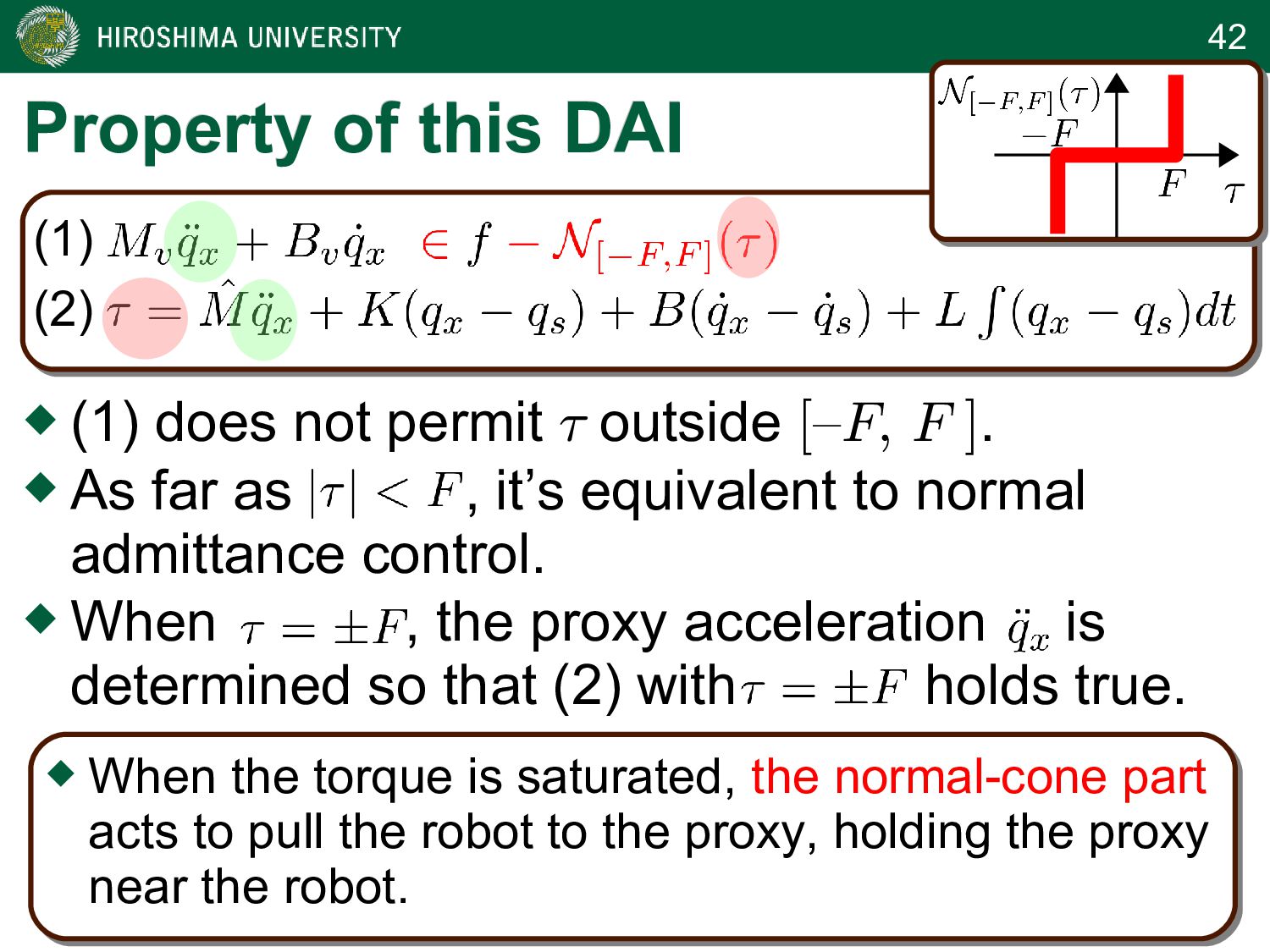
]. As far as , it’s equivalent to normal admittance control. When , the proxy acceleration is determined so that (2) with holds true. (2) (1) Property of this DAI Property of this DAI When the torque is saturated, the normal-cone part acts to pull the robot to the proxy, holding the proxy near the robot.
proxy, and snaps back later [N] Proxy follows robot Experiments & Results Experiments & Results [C] Conventional Method [N] New method Pushing the link with holding force sensor [C] Proxy moves away and Robot tries to chase it. [N] Proxy stays with Robot.
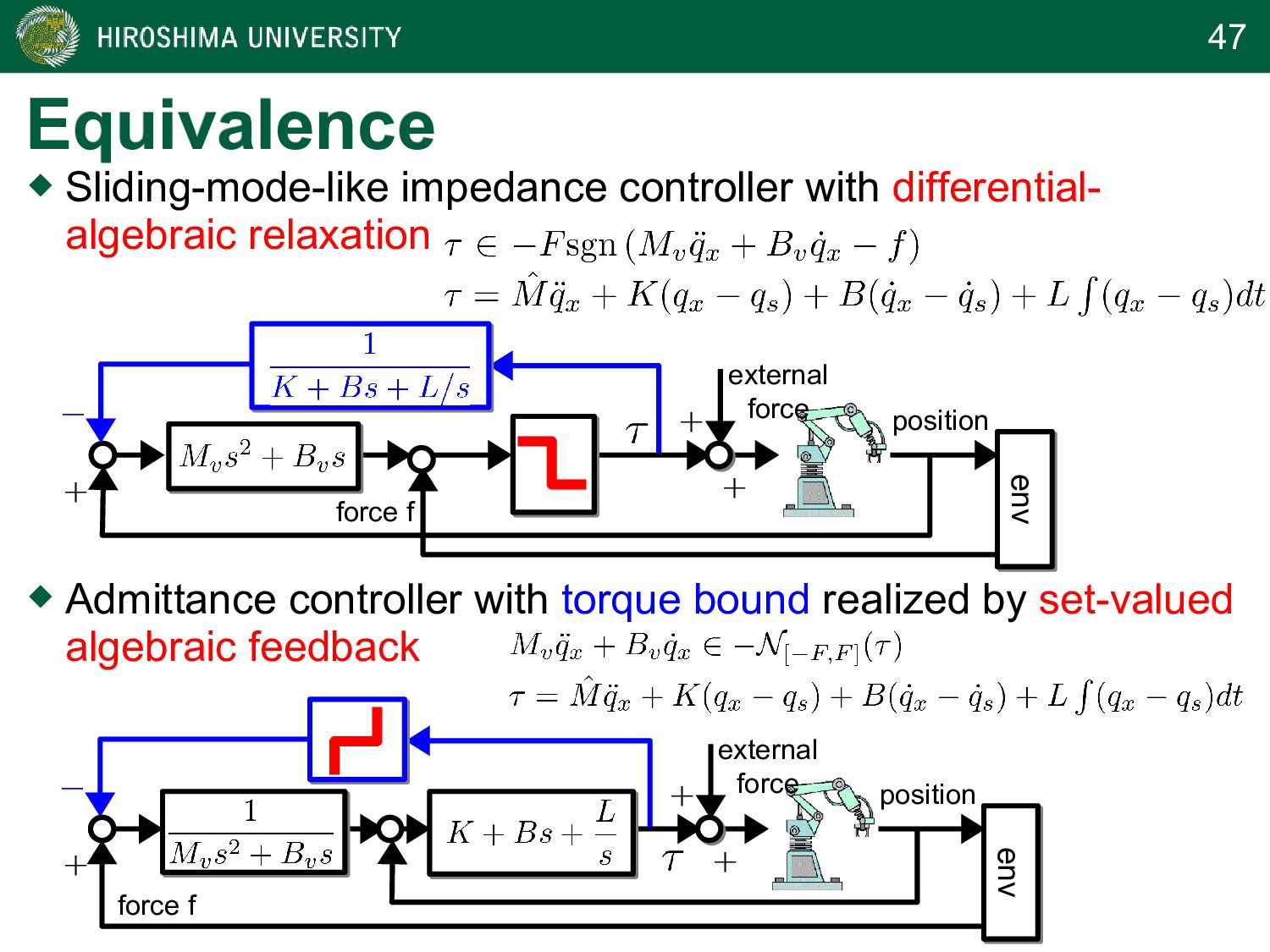
by set-valued algebraic feedback position force f external force + + + env env - position force f external force + + + env env - Sliding-mode-like impedance controller with differential- algebraic relaxation
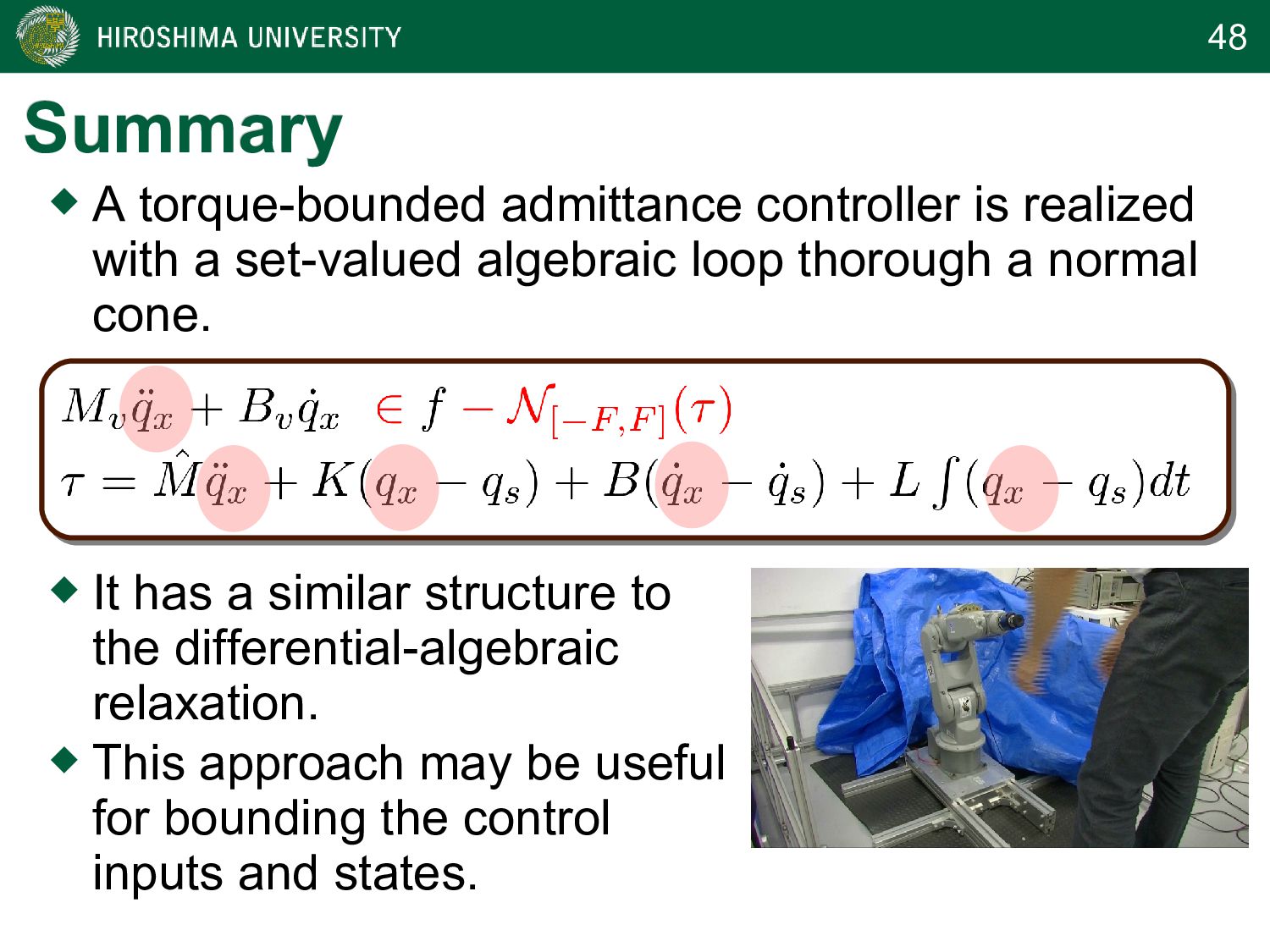
with a set-valued algebraic loop thorough a normal cone. It has a similar structure to the differential-algebraic relaxation. This approach may be useful for bounding the control inputs and states.
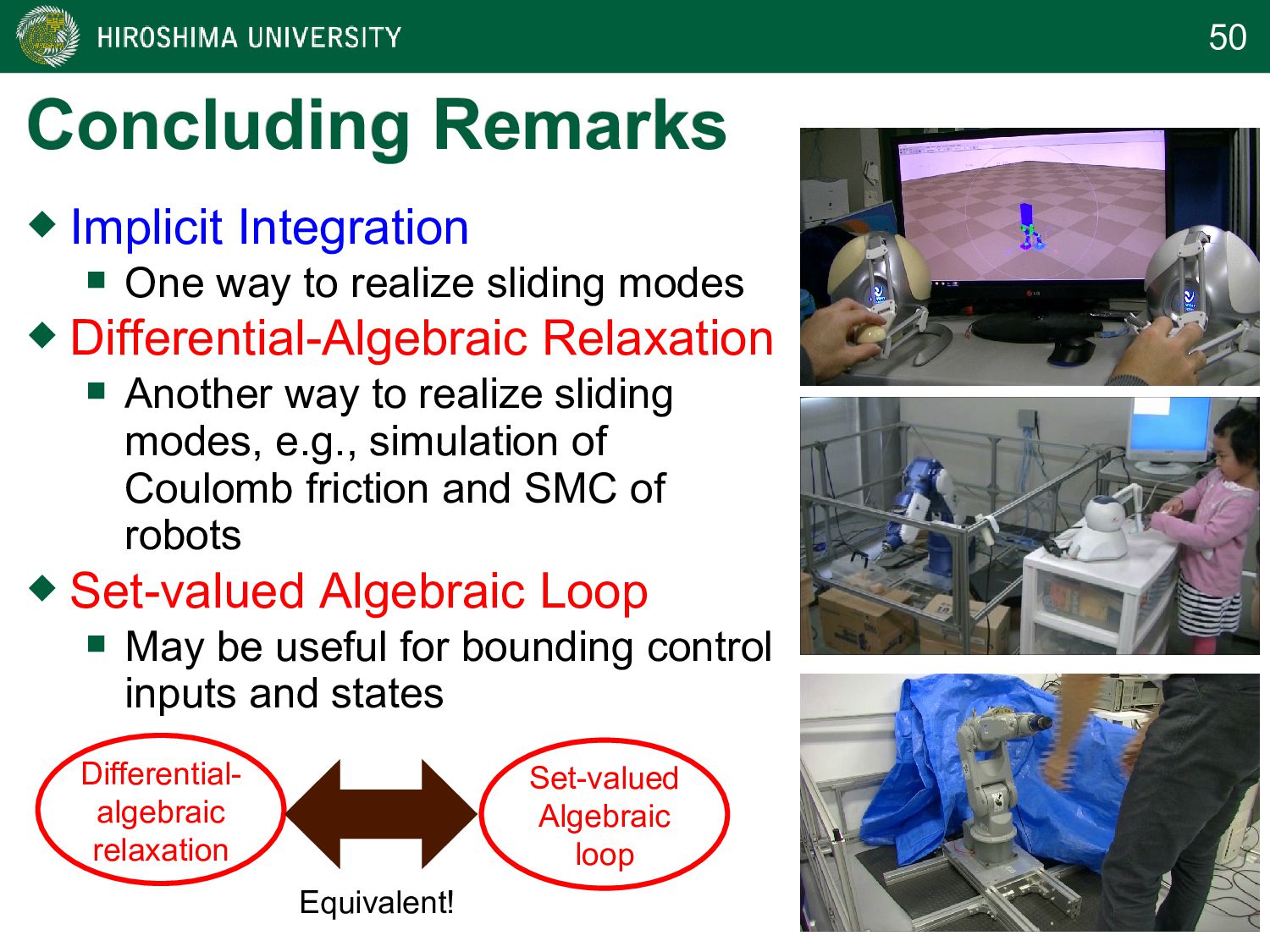
way to realize sliding modes Differential-Algebraic Relaxation Another way to realize sliding modes, e.g., simulation of Coulomb friction and SMC of robots Set-valued Algebraic Loop May be useful for bounding control inputs and states Set-valued Algebraic loop Differential- algebraic relaxation Equivalent!
{kind=link}
![3 Today's Talk Today's Talk [1] Implicit Integration for](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_1.jpg){kind=link}
![4 [1] [1] Implicit Integration Implicit Integration (How I arrived](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![15 [2] [2] Differential Algebraic Relaxation Differential Algebraic Relaxation [2]](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
![18 Physical Interpretation Physical Interpretation [Kikuuwe et al.: IEEE-TRO, 2006]](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![22 [3] [3] Differential Algebraic Relaxation Differential Algebraic Relaxation for](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![36 [4] [4] Force Control with Force Control with Set-valued](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![46 Pushing the link [C] Robot departs from](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_43.jpg){kind=link}
{kind=link}
{kind=link}
![49 [5] [5] Concluding Remarks Concluding Remarks [5] [5] Concluding](https://files.speakerdeck.com/presentations/5003b6502c634486bc19f2f0ce764798/slide_46.jpg){kind=link}
{kind=link}