Share
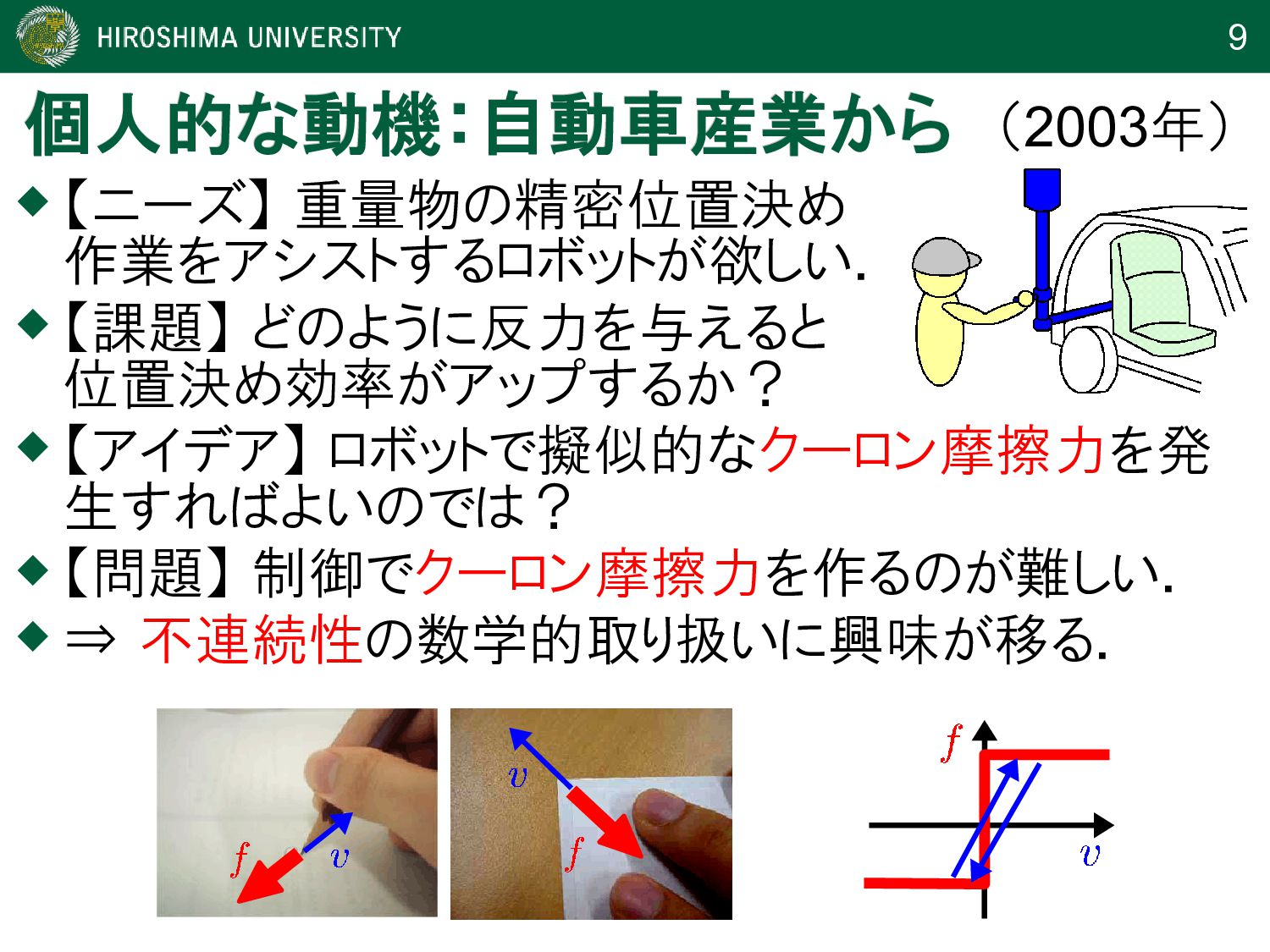
2022年09月10日(土)のヒューマノイド・ロボティクス2022夏の学校における発表資料. https://sig.rsj-web.org/humanoidrobotics/sshr2022.html
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![7 本日の内容 本日の内容 [0] はじめに [1] 集合値関数と代数ループ ](https://files.speakerdeck.com/presentations/8482d0858bb64eab88ffb1141f702b70/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![22 (単位飽和関数) 法錐と「代数ループ」(一次元版) 法錐と「代数ループ」(一次元版) [Kikuuwe et al., 2006; IEEE-TRO] [Kikuuwe](https://files.speakerdeck.com/presentations/8482d0858bb64eab88ffb1141f702b70/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![42 さまざまな拘束がある剛体系の一般 さまざまな拘束がある剛体系の一般表現 表現 [Kikuuwe & Brogliato, 2017] 両側拘束:](https://files.speakerdeck.com/presentations/8482d0858bb64eab88ffb1141f702b70/slide_39.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![61 まとめ まとめ [1] 集合値関数と代数ループ 「法錘」と,代数ループによる「射影」への変換 [2]](https://files.speakerdeck.com/presentations/8482d0858bb64eab88ffb1141f702b70/slide_58.jpg){kind=link}
{kind=link}