Japan Bandung Inst. Tech., Indonesia Gyuho Byun Rainhart Pasaribu A First-Order Differentiator with A First-Order Differentiator with First-Order Sliding Mode Filtering First-Order Sliding Mode Filtering
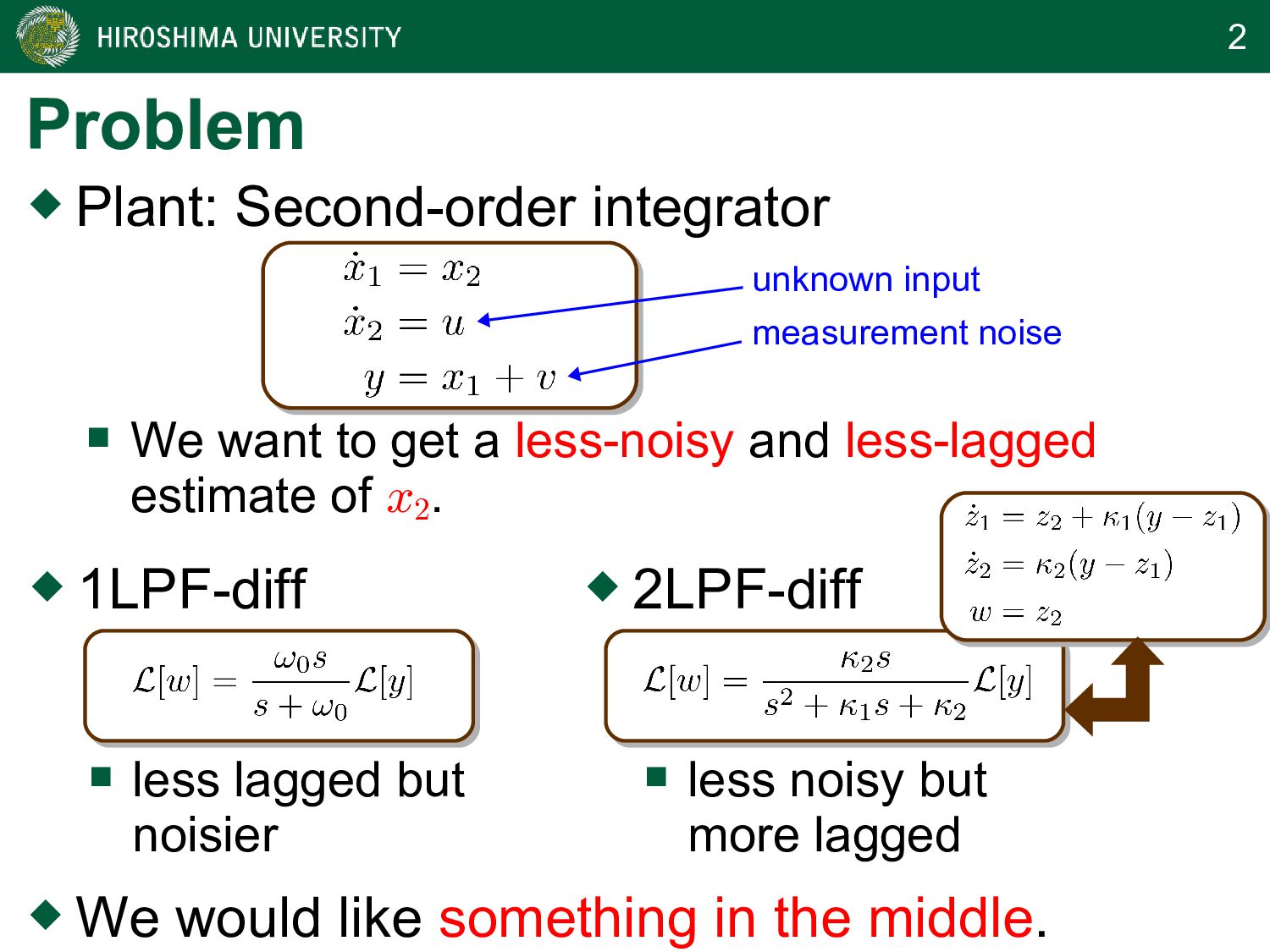
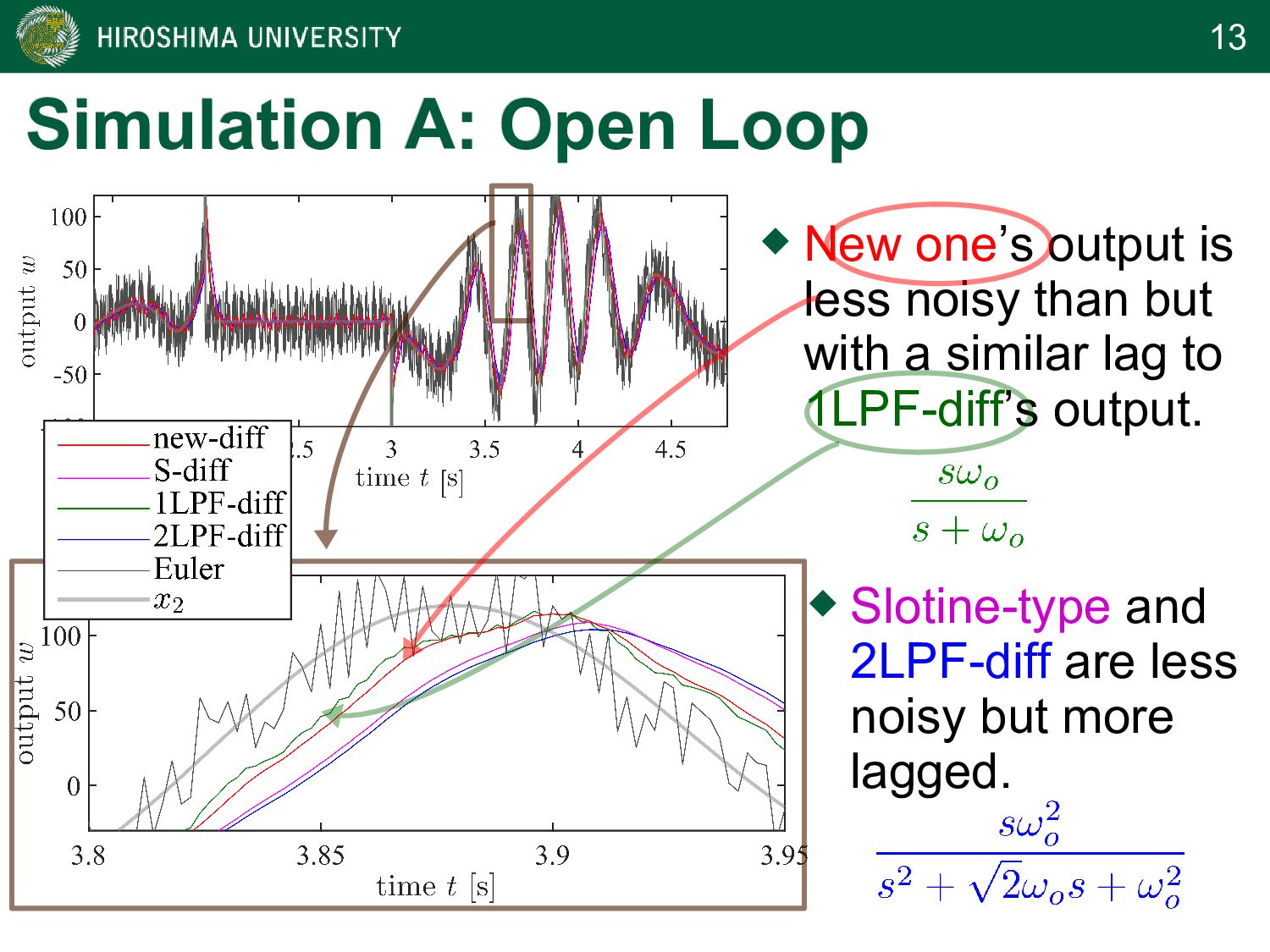
Problem Plant: Second-order integrator less noisy but more lagged 1LPF-diff measurement noise unknown input We want to get a less-noisy and less-lagged estimate of x2 . less lagged but noisier 2LPF-diff
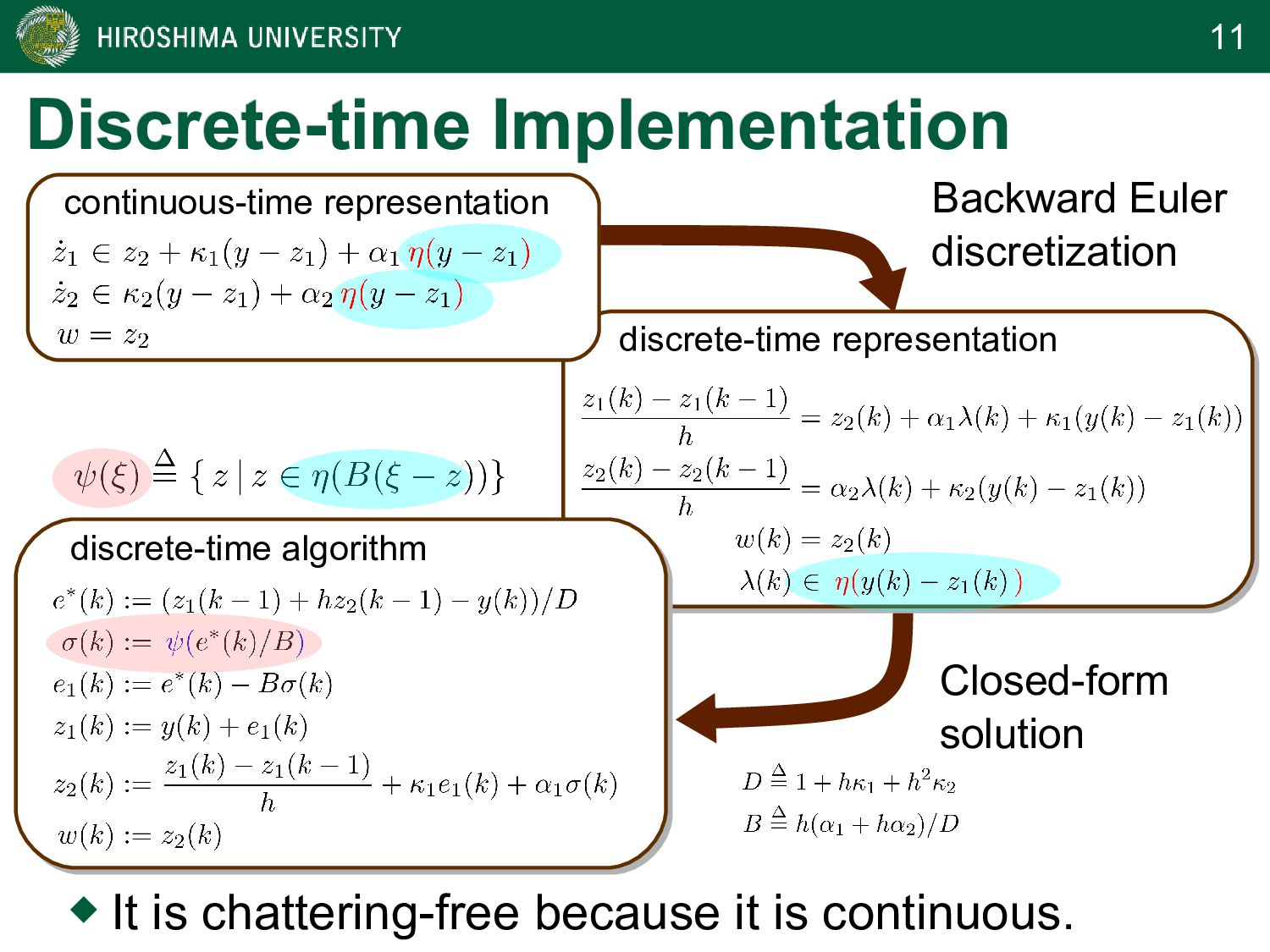
New “non-Lipschitz” variant of Slotine-type observer and its properties Discrete-time Implementation based on implicit discretization Some Simulation Results Conclusions
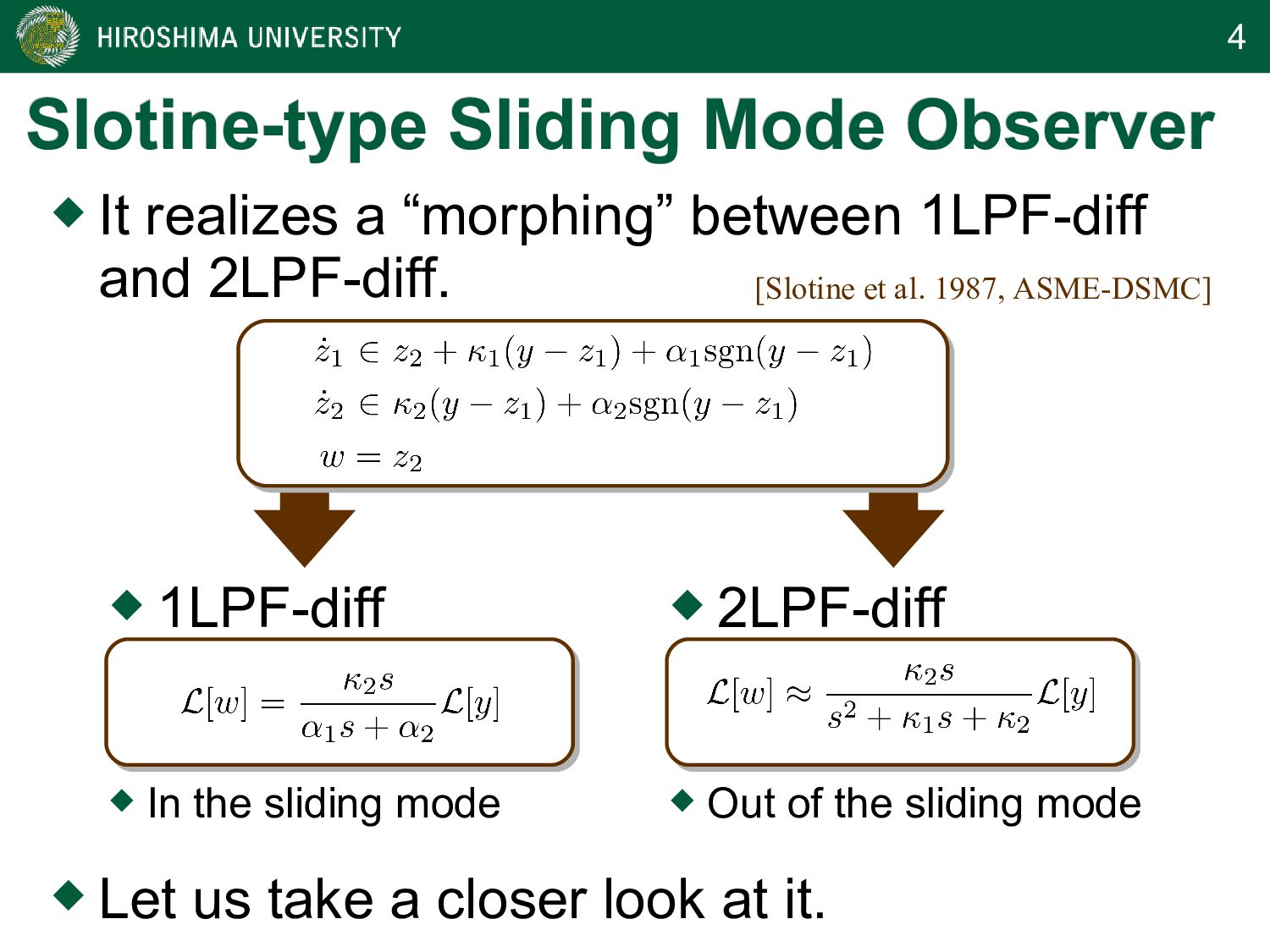
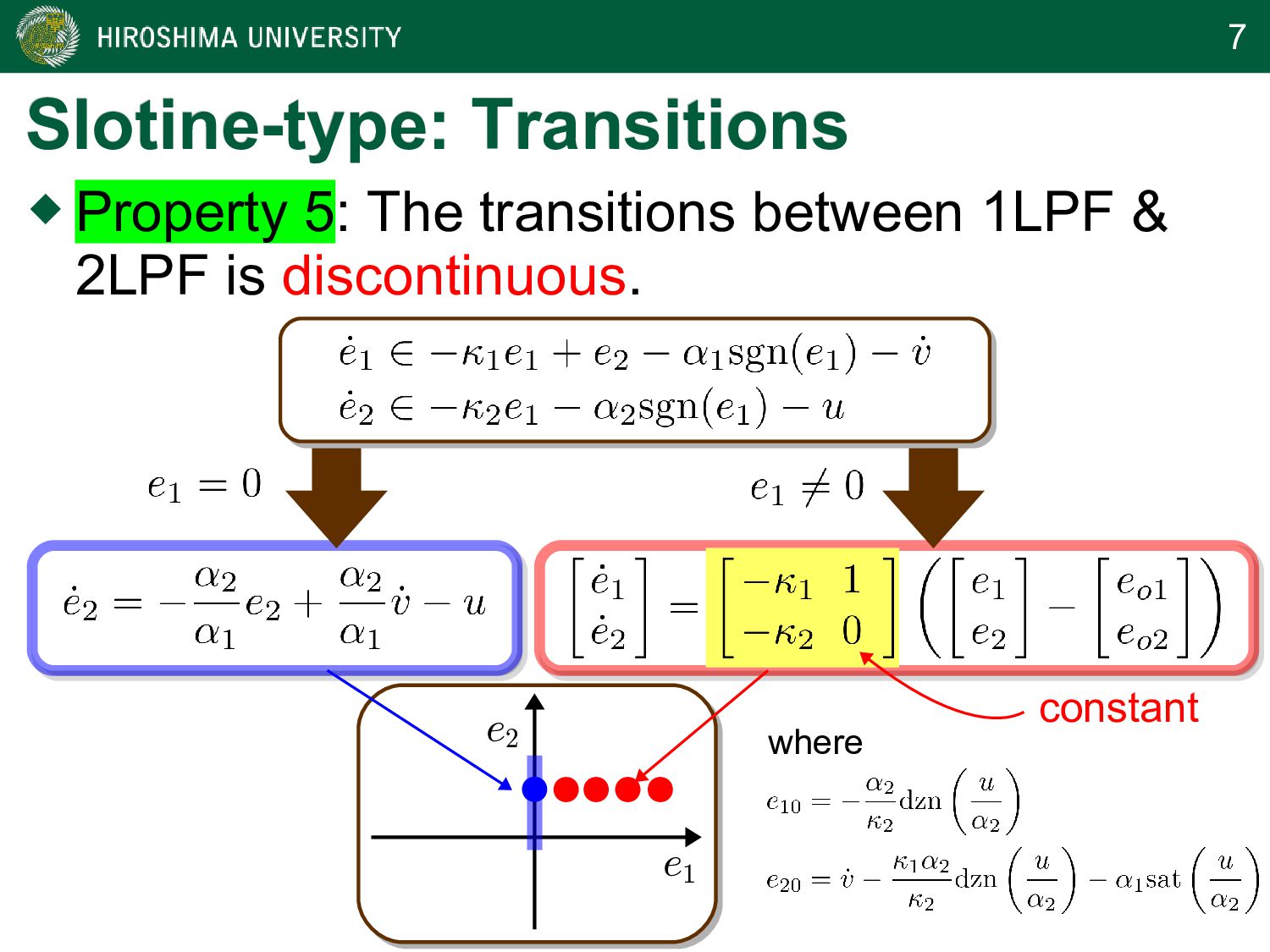
et al. 1987, ASME-DSMC] It realizes a “morphing” between 1LPF-diff and 2LPF-diff. In the sliding mode Out of the sliding mode 1LPF-diff 2LPF-diff Let us take a closer look at it.
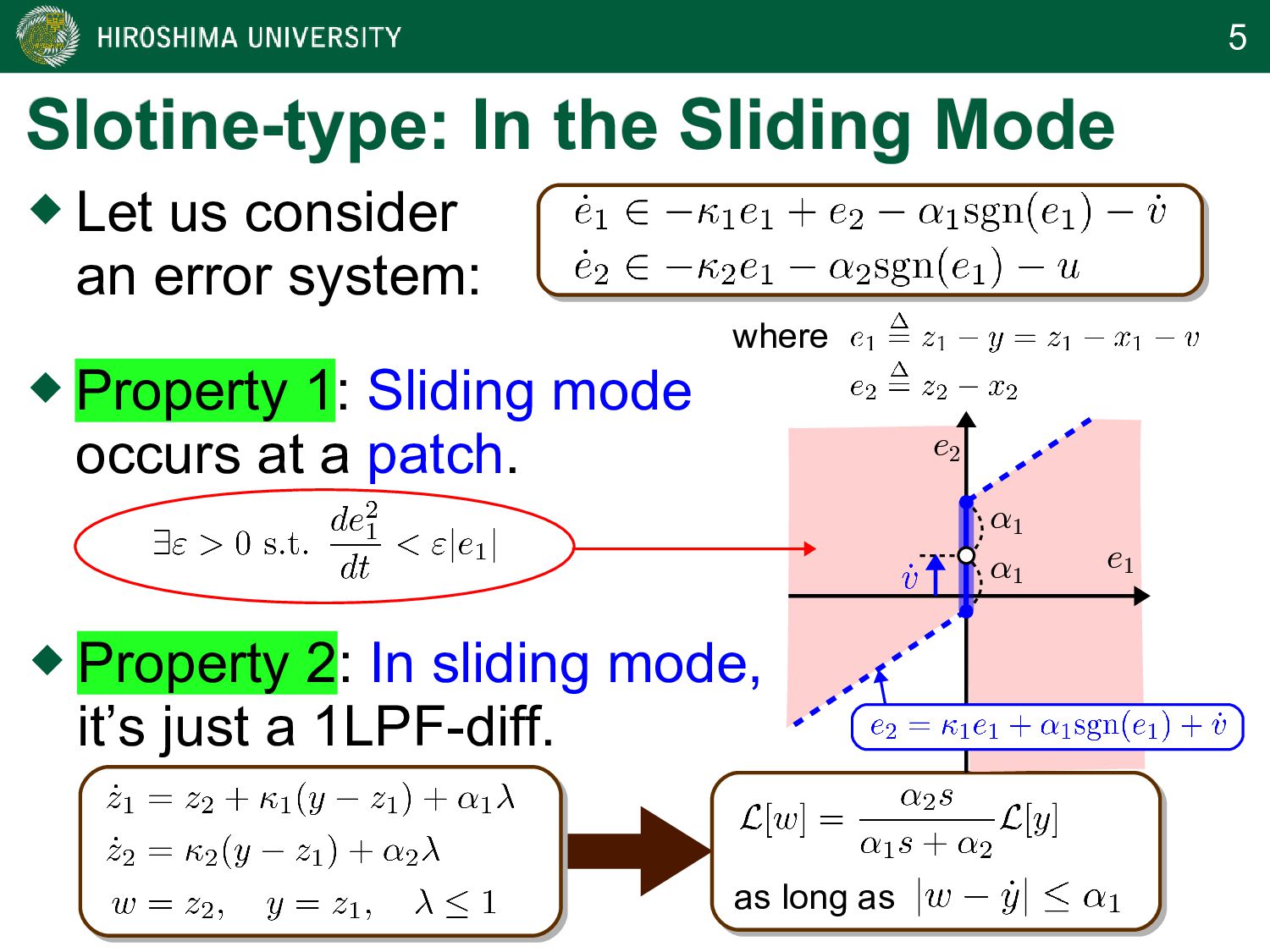
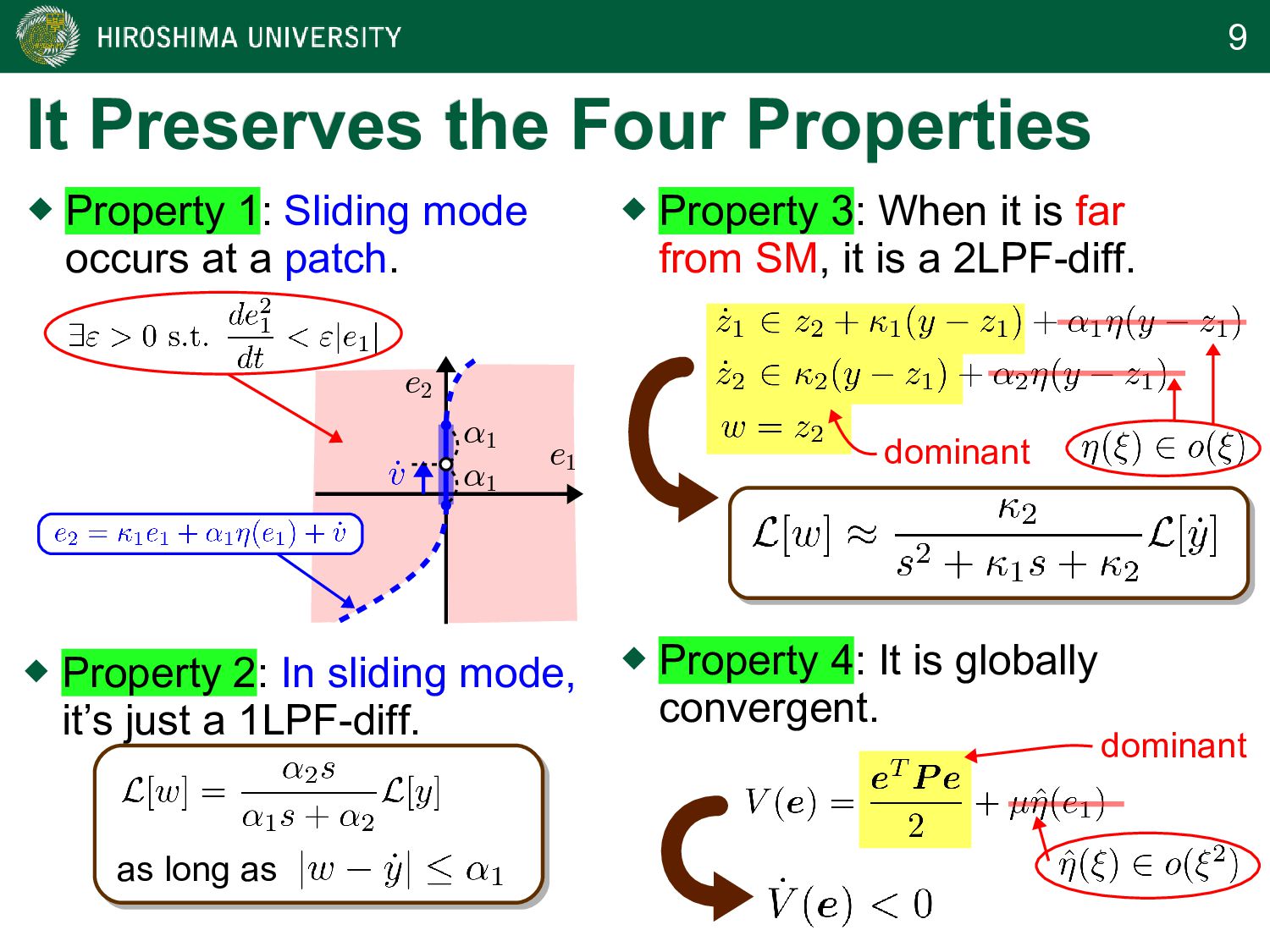
Mode as long as e1 e2 ®1 ®1 Let us consider an error system: Property 2: In sliding mode, it’s just a 1LPF-diff. Property 1: Sliding mode occurs at a patch. where
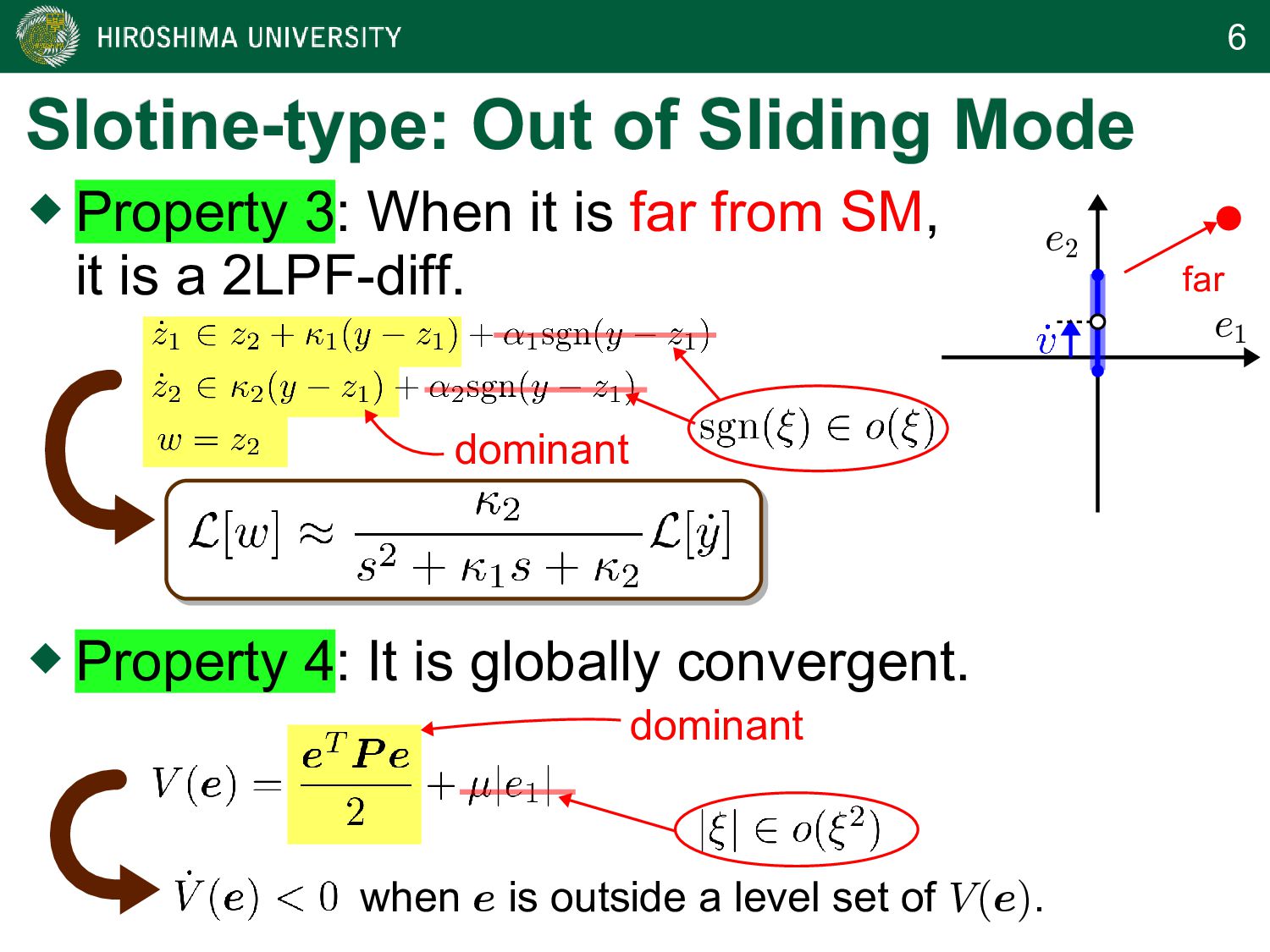
Mode Property 3: When it is far from SM, it is a 2LPF-diff. Property 4: It is globally convergent. dominant e1 e2 far when e is outside a level set of V(e). dominant
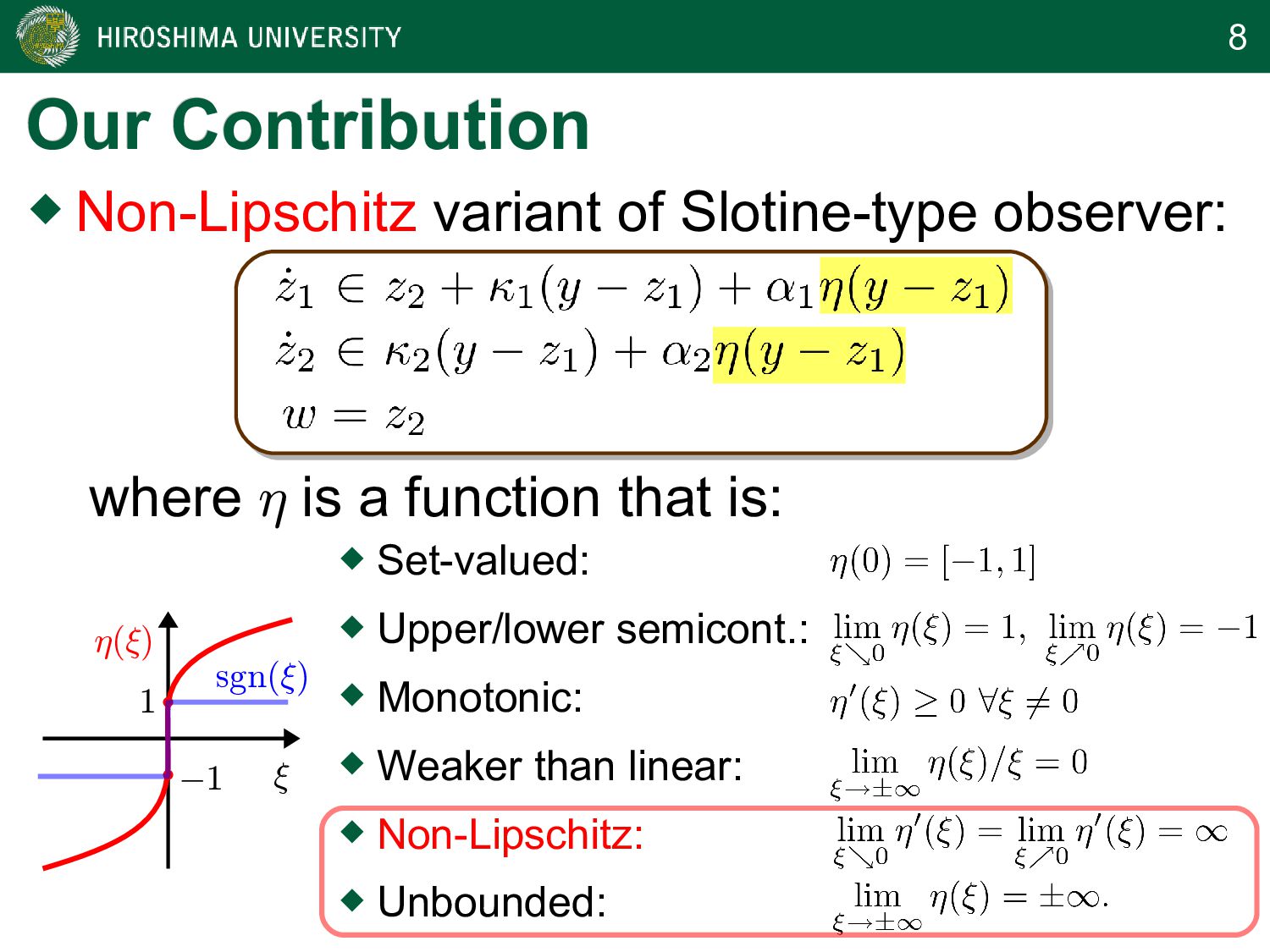
than linear: Non-Lipschitz: Unbounded: Our Contribution Our Contribution Non-Lipschitz variant of Slotine-type observer: » ´(») 1 ¡1 sgn(») where ´ is a function that is:
It Preserves the Four Properties as long as Property 2: In sliding mode, it’s just a 1LPF-diff. Property 1: Sliding mode occurs at a patch. Property 3: When it is far from SM, it is a 2LPF-diff. Property 4: It is globally convergent. dominant dominant
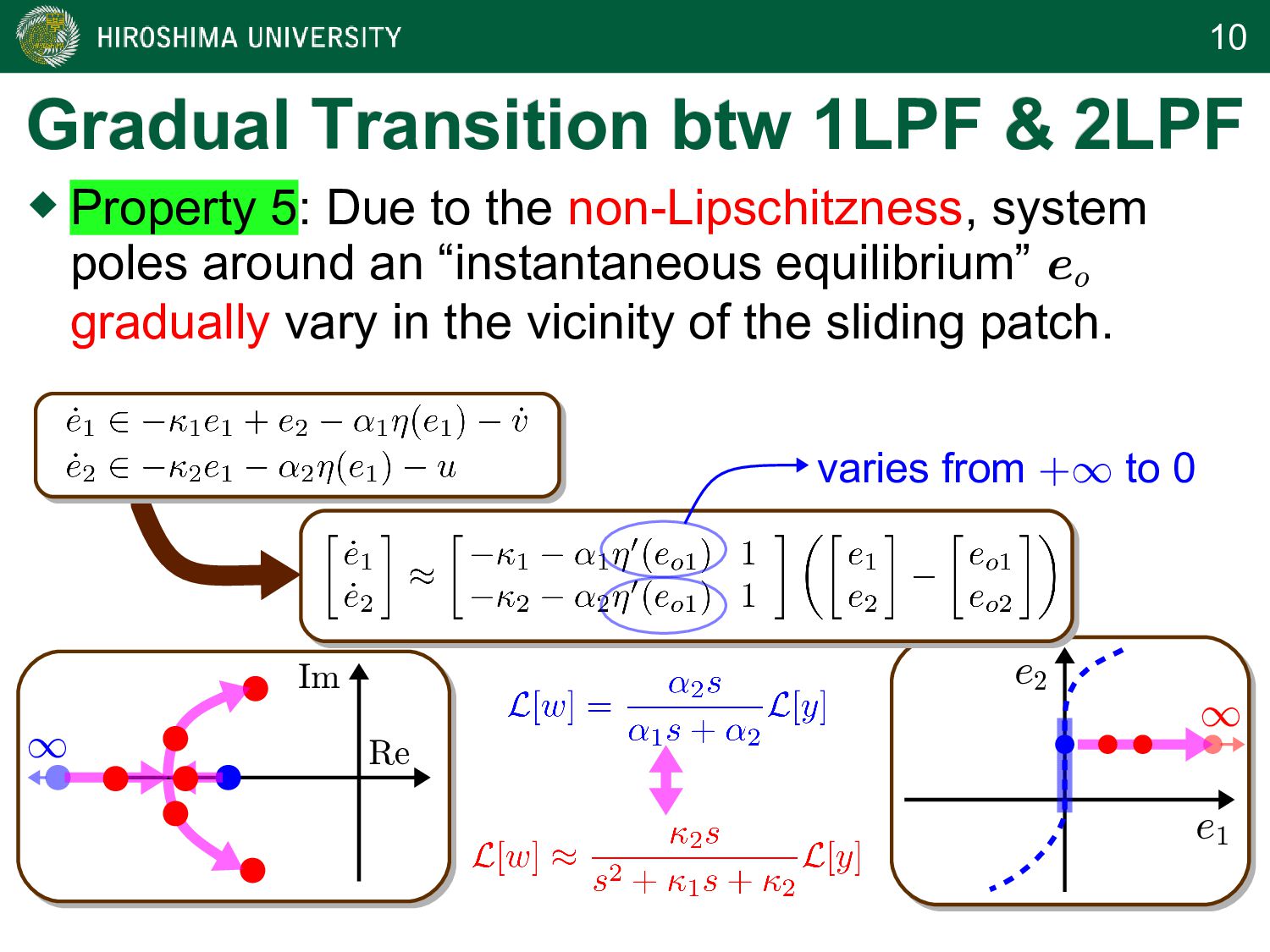
Gradual Transition btw 1LPF & 2LPF Property 5: Due to the non-Lipschitzness, system poles around an “instantaneous equilibrium” eo gradually vary in the vicinity of the sliding patch. varies from +1 to 0 Re Im 1
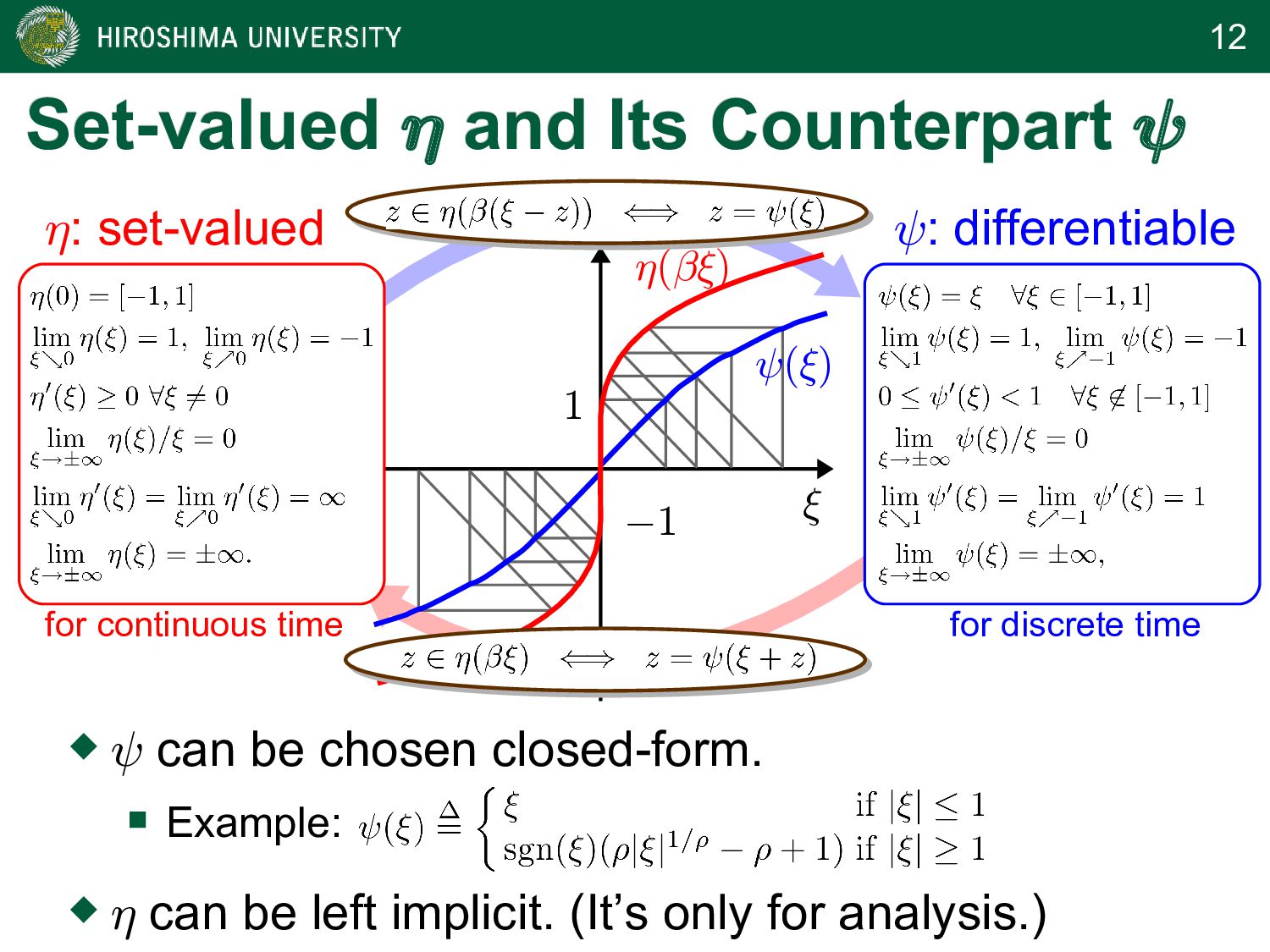
Counterpart à à à can be chosen closed-form. Example: ´ can be left implicit. (It’s only for analysis.) » 1 ¡1 Ã(») ´(¯») Ã: differentiable ´: set-valued for continuous time for discrete time
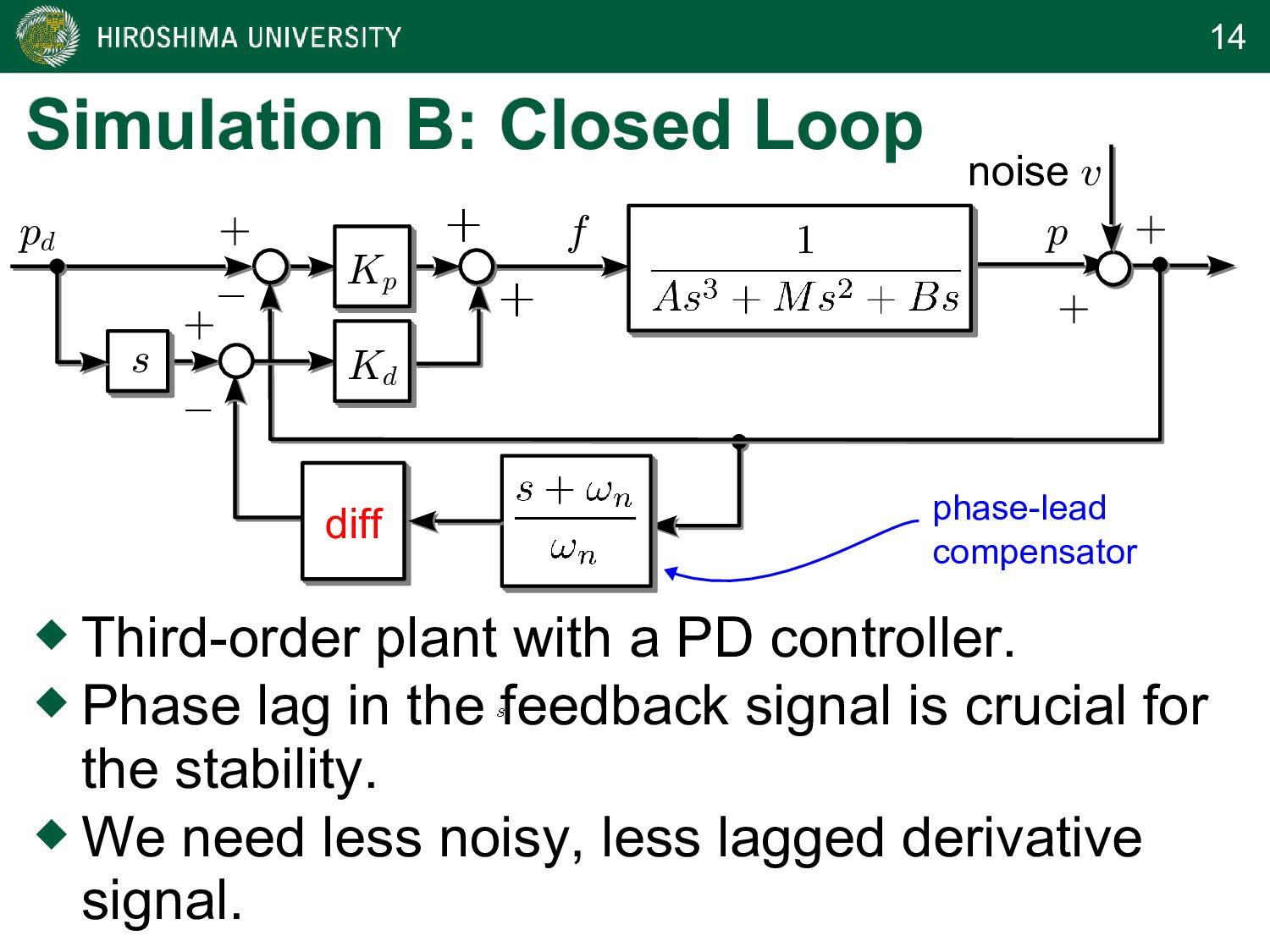
Third-order plant with a PD controller. Phase lag in the feedback signal is crucial for the stability. We need less noisy, less lagged derivative signal. diff diff Kd Kp f s pd p ¡ ¡ + + + + phase-lead compensator noise v
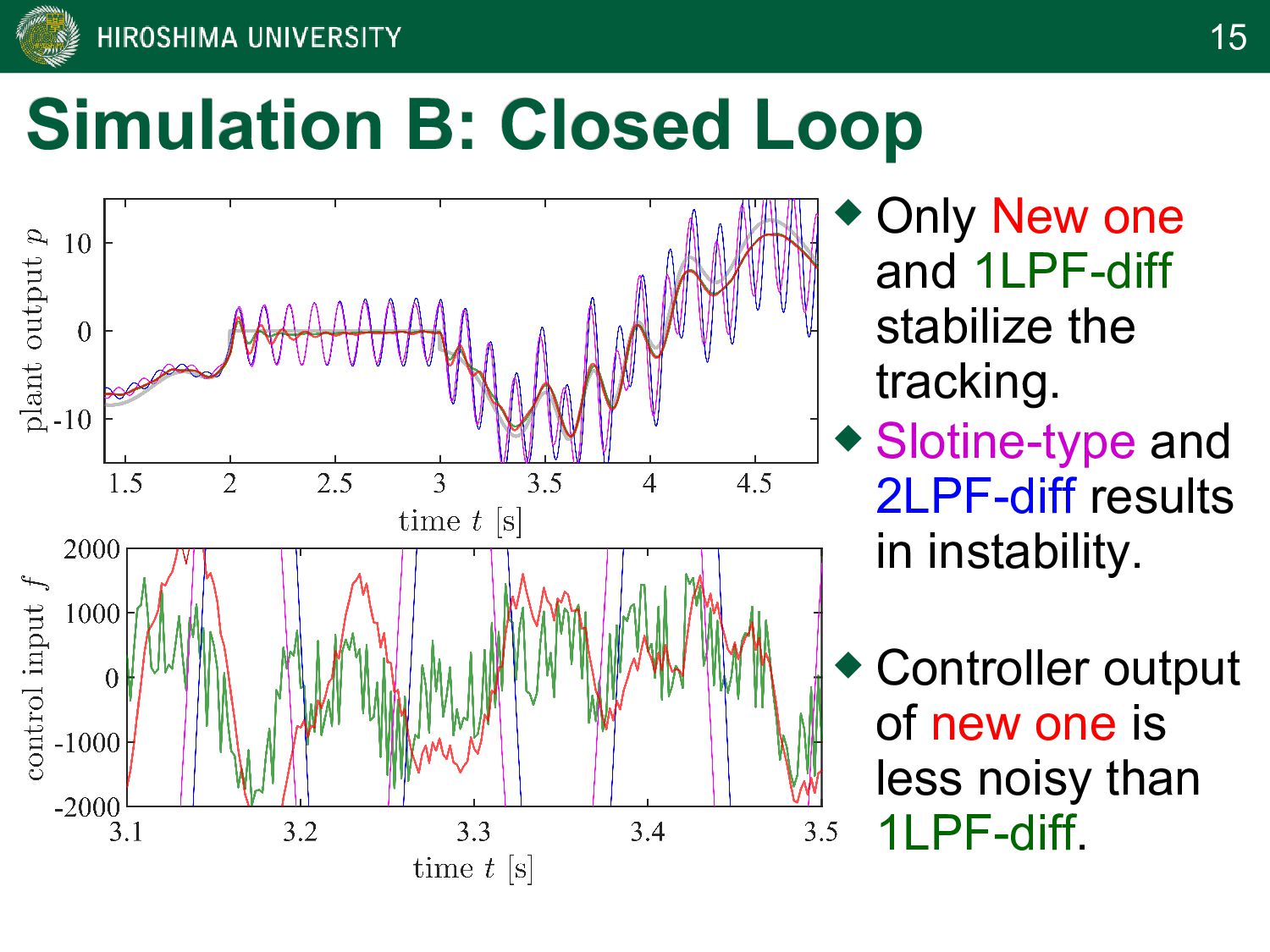
Only New one and 1LPF-diff stabilize the tracking. Slotine-type and 2LPF-diff results in instability. Controller output of new one is less noisy than 1LPF-diff.
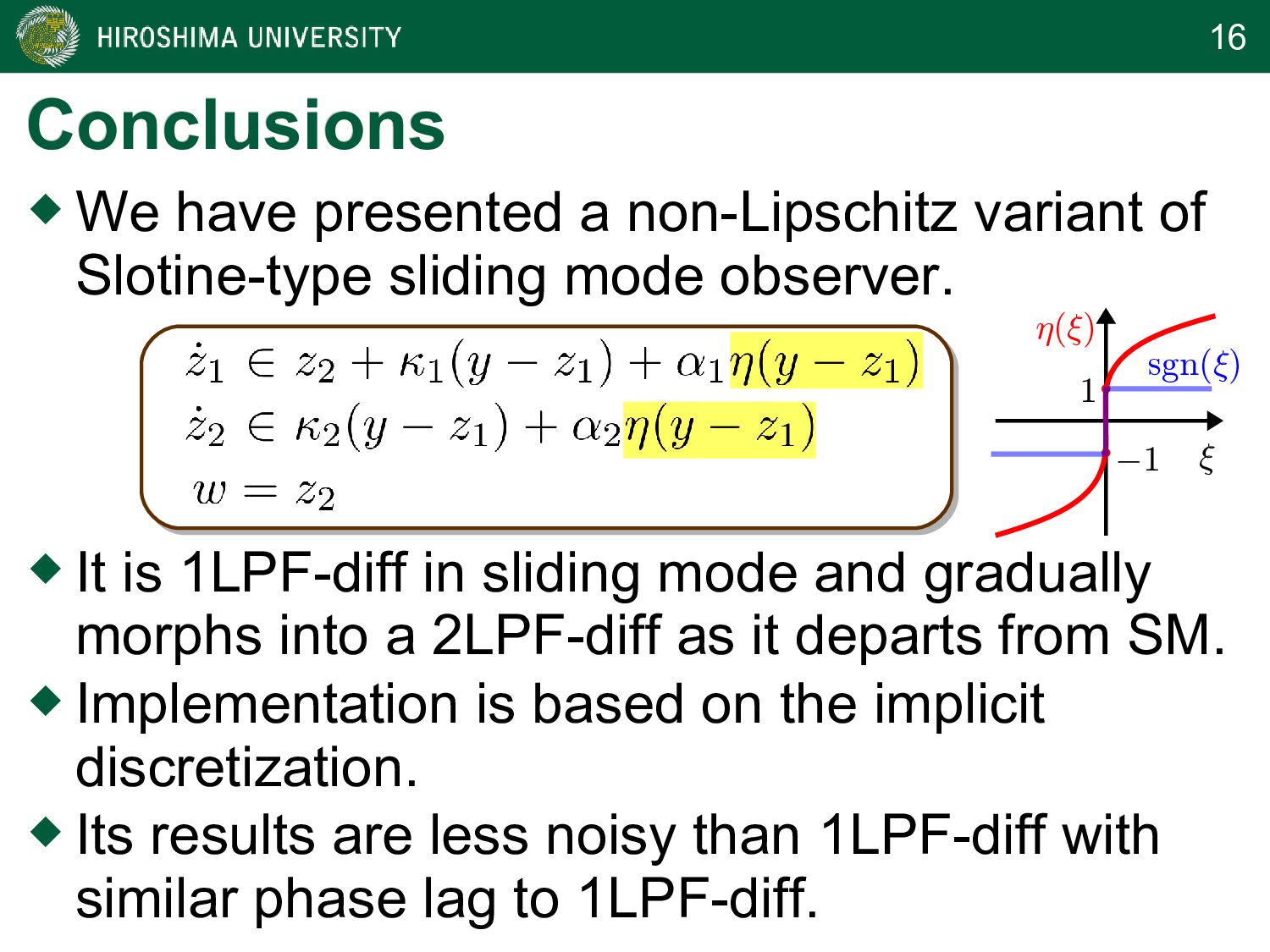
of Slotine-type sliding mode observer. It is 1LPF-diff in sliding mode and gradually morphs into a 2LPF-diff as it departs from SM. Implementation is based on the implicit discretization. Its results are less noisy than 1LPF-diff with similar phase lag to 1LPF-diff. » ´(») 1 ¡1 sgn(»)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}