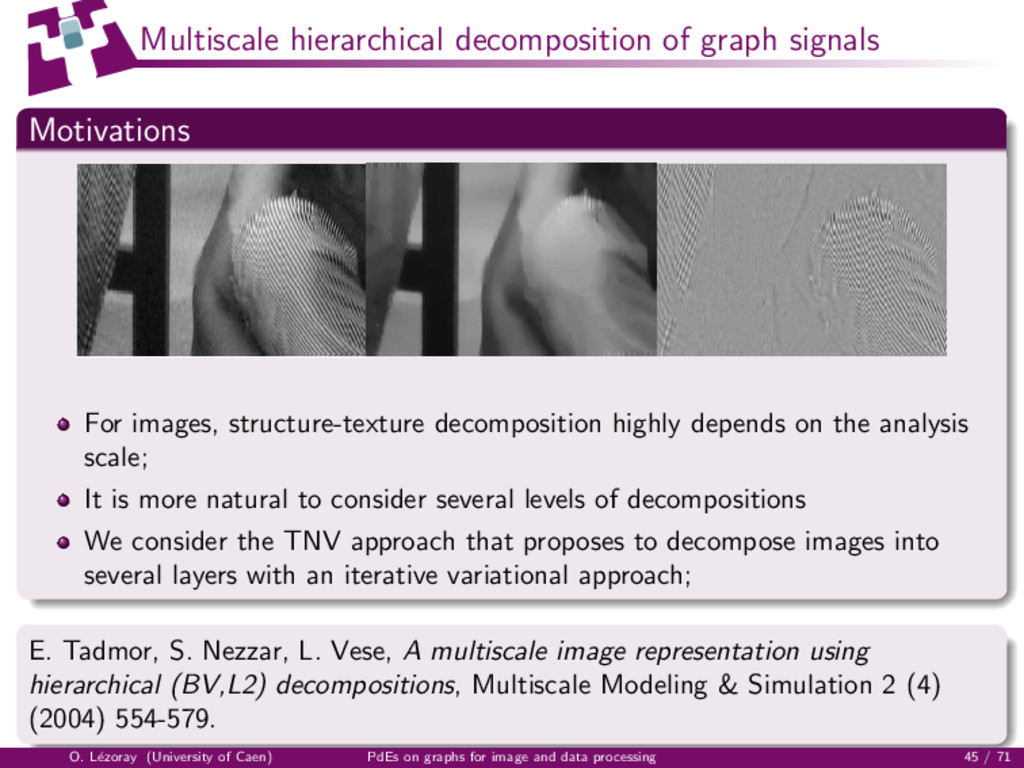
IMAGE PROCESSING, VOL. 12, NO. 8, AUGUST 2003 Fig. 2. Basic algorithm proposed in this paper. The original image in the first row, left (a section of Fig. 1) is decomposed into a structure image and a image, [31], second row. Note how the image on the left mainly contains the underlying image structure while the image on the right mainly contains the These two images are reconstructed via inpainting, [5], and texture synthesis, [10], respectively, third row. The image on the left managed to reconstruct the s (see for example the chair vertical leg), while the image on the right managed to reconstruct the basic texture. The resulting two images are added to ob reconstructed result, first row right, where both structure and texture are recovered. For , as used in this paper, the corresponding Euler- Lagrange equations are [31] (5) (6) (7) As can be seen from the examples in [31] and the images in this paper, the minimization model (4) allows to extract from a given real textured image the components and , such that Figure 4.1 – Illustration de l’utilisation de la décomposition structure-texture pour l’inpaiting simultané des structures et textures dans les images. dans la figure 4.1 tirée de [BVSO03]. Signalons enfin, que d’autres algorithmes d’inpaiting ont eu recours à la décomposition structure-texture, notamment dans [ESQD05]. L’application de la décomposition structure-texture à la détection de contours a été considérée dans [BLMV10] où les auteurs ont proposé d’e ectuer la détection sur la partie u. En segmentation d’images, les auteurs de [BT06] ont proposés de séparer les composantes u et v et d’e ectuer la segmentation sur la partie structure uniquement. Récemment, les auteurs de [CPGN+12] ont combiné une décompo- sition structure-texture avec l’algorithme de segmentation basé sur les coupes normalisées de Shi et Malik [SM00]. Ce dernier est basé sur la décomposition Fig. 2. Basic algorithm proposed in this paper. The original image in the first row, left (a section of Fig. 1) is decomposed into a structure image and a te image, [31], second row. Note how the image on the left mainly contains the underlying image structure while the image on the right mainly contains the te These two images are reconstructed via inpainting, [5], and texture synthesis, [10], respectively, third row. The image on the left managed to reconstruct the stru (see for example the chair vertical leg), while the image on the right managed to reconstruct the basic texture. The resulting two images are added to obta reconstructed result, first row right, where both structure and texture are recovered. For , as used in this paper, the corresponding Euler- Lagrange equations are [31] (5) (6) (7) As can be seen from the examples in [31] and the images in this paper, the minimization model (4) allows to extract from a given real textured image the components and , such that Figure 4.1 – Illustration de l’utilisation de la décomposition structure-texture pour l’inpaiting simultané des structures et textures dans les images. dans la figure 4.1 tirée de [BVSO03]. Signalons enfin, que d’autres algorithmes d’inpaiting ont eu recours à la décomposition structure-texture, notamment dans [ESQD05]. L’application de la décomposition structure-texture à la détection de contours a été considérée dans [BLMV10] où les auteurs ont proposé d’e ectuer la détection sur la partie u. En segmentation d’images, les auteurs de [BT06] ont proposés de séparer les composantes u et v et d’e ectuer la segmentation sur la partie structure uniquement. Récemment, les auteurs de [CPGN+12] ont combiné une décompo- sition structure-texture avec l’algorithme de segmentation basé sur les coupes normalisées de Shi et Malik [SM00]. Ce dernier est basé sur la décomposition For images, structure-texture decomposition highly depends on the analysis scale; It is more natural to consider several levels of decompositions We consider the TNV approach that proposes to decompose images into several layers with an iterative variational approach; E. Tadmor, S. Nezzar, L. Vese, A multiscale image representation using hierarchical (BV,L2) decompositions, Multiscale Modeling & Simulation 2 (4) (2004) 554-579. O. L´ ezoray (University of Caen) PdEs on graphs for image and data processing 45 / 71
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}