Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
動くプログラミング
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Naoki Kato
PRO
July 18, 2023
Education
110
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
動くプログラミング
東京学芸大学教育学部共通SE科目
小学校におけるプログラミング教育
数でプログラミング教育
2023/5/30更新
Naoki Kato
PRO
July 18, 2023
More Decks by Naoki Kato
See All by Naoki Kato
ICTを使った授業アップデートについて(次期学習指導要領への助走)
naokikato
PRO
0
14
E類入門セミナー:情報セキュリティと情報倫理
naokikato
PRO
0
54
学習者用デジタル教科書の活用
naokikato
PRO
0
94
子どもが自立した学習者となるデジタルの活用について
naokikato
PRO
0
230
高校におけるプログラミング教育を考える
naokikato
PRO
0
240
デジタル教科書研究の今
naokikato
PRO
0
63
デジタル教科書の現在地と今後の展望
naokikato
PRO
0
130
複数カメラ活用による授業の遠隔参観や収録コンテンツ開発の促進
naokikato
PRO
0
120
教育DXの推進に向けて
naokikato
PRO
0
78
Other Decks in Education
See All in Education
!コスパよくインターンに受かる方法!
ruribou
1
300
AI-Based Speaking Assessment of a Short-Term Study Abroad Program
uranoken
0
370
[2026前期火5] 論理学(京都大学文学部 前期 第3回)「形式言語と四つのキーワード:メタ・構成・意味論・ハーモニー」
yatabe
0
600
[2026前期火5] 論理学(京都大学文学部 前期 第8回)「正規化定理の証明」
yatabe
0
230
2026年度春学期 統計学 第9回 確からしさを記述する ー 確率 (2026. 5. 28)
akiraasano
PRO
0
150
Where Data Meets Storytelling
georgesinnott
0
130
Curso de Consagração ao Sagrado Coração de Jesus - O Sagrado Coração na História (Aula 01)
cm_manaus
0
240
Course Review - Lecture 13 - Next Generation User Interfaces (4018166FNR)
signer
PRO
0
2.3k
良書紹介08_ 頭のいい子がやっているすごいグラフの読み方
bunnchinn3
0
120
「答えを出す」より「わかる」をつくる
kzkmaeda
1
230
BITCOIN : Les fondamentaux !
rlifchitz
0
200
2026年度春学期 統計学 第5回 分布をまとめるー記述統計量(平均・分散など) (2026. 5. 7)
akiraasano
PRO
0
200
Featured
See All Featured
Building the Perfect Custom Keyboard
takai
2
810
Jess Joyce - The Pitfalls of Following Frameworks
techseoconnect
PRO
1
190
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.7k
Making the Leap to Tech Lead
cromwellryan
135
10k
The agentic SEO stack - context over prompts
schlessera
0
850
Sharpening the Axe: The Primacy of Toolmaking
bcantrill
46
2.9k
Typedesign – Prime Four
hannesfritz
42
3.1k
The Art of Programming - Codeland 2020
erikaheidi
57
14k
KATA
mclloyd
PRO
35
15k
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
AI: The stuff that nobody shows you
jnunemaker
PRO
8
830
Effective software design: The role of men in debugging patriarchy in IT @ Voxxed Days AMS
baasie
0
450
Transcript
©2016- Naoki Kato, IML at TGU 共通SE科目 東 東京 京学
学芸 芸大 大学 学 I IC CT Tセ セン ンタ ター ー 教 教育 育情 情報 報化 化研 研究 究チ チー ーム ム 加 加藤 藤直 直樹 樹 Programming Education in Elementary School 小学校における プログラミング教育 動かすプログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミング 動かすプログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミングの例
©2016- Naoki Kato, IML at TGU 道順プログラミング Hour of code
l パズルゲーム型ブロックプログラミング https://hourofcode.com/code
©2016- Naoki Kato, IML at TGU 道順プログラミング タンジブルプログラミング 左上写真:プログラミングロボ コード・A・ピラー
https://www.coporii.com/?pid=113251915 右上写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html 下左写真:GIZMODO https://www.gizmodo.jp/2016/03/3cubetto.html 下右写真:プログラミング+ https://ascii.jp/elem/000/001/265/1265712/
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 1年生活・課程外 小金井市立前原小
©2016- Naoki Kato, IML at TGU 道順プログラミング ゴールをめざせ 低学年生活・課程外 小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 道順プログラミング アンプラグドでゴールをめざせ 3年社会 町田市立第五小学校
1年課程外 奥多摩町立古里小学校
©2016- Naoki Kato, IML at TGU 道順プログラミング ブロックプログラミングでゴールをめざせ
©2016- Naoki Kato, IML at TGU 道順プログラミングのタイプ
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ1 ❌ ❌
❌ G 前に一歩 右を向く 左を向く
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのタイプ2 ❌ ❌
❌ G 前に一歩 右に一歩 左に一歩 後に一歩
©2016- Naoki Kato, IML at TGU 道順プログラミング コード・A・ピラーなどはタイプ3 G 前進
右折 左折
©2016- Naoki Kato, IML at TGU 道順プログラミング 道順プログラミングのポイント l タイプ1,タイプ3は向きの感覚が必要
l 使える命令で,道順が変化 ❌ ❌ ❌ G プログラミング の本質 でもある
©2016- Naoki Kato, IML at TGU うまくいく道順プログラミング
©2016- Naoki Kato, IML at TGU 道順プログラミング プログラムが確認できること l できないと,意図通り動かなかった時
l 正しい試行錯誤につながらない 写真:プログラミングロボット True true https://www.kenis.co.jp/truetrue/index.html プログラムが 間違っていた? 実は入力が 間違っていた?
©2016- Naoki Kato, IML at TGU 道順プログラミング 安定してうごくこと l うごかないと,意図通り動かなかった時
l 正しい試行錯誤につながらない プログラムが 間違っていた? たまたま うまく 動かなかった?
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 動かすプログラミング
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 決められたルートを走らせる 5年 総合
昭島市立中神小
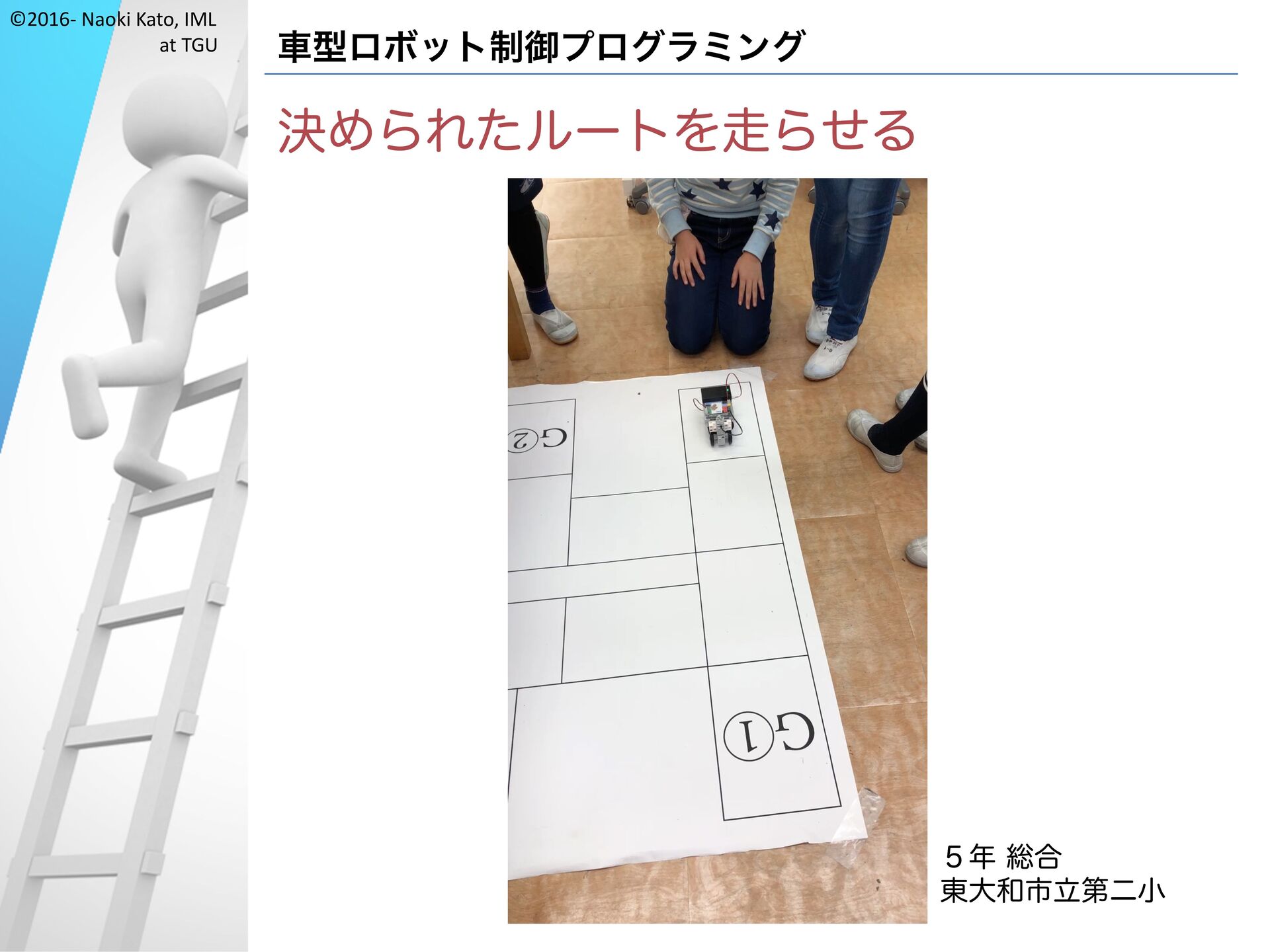
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング 決められたルートを走らせる 5年 総合
東大和市立第二小
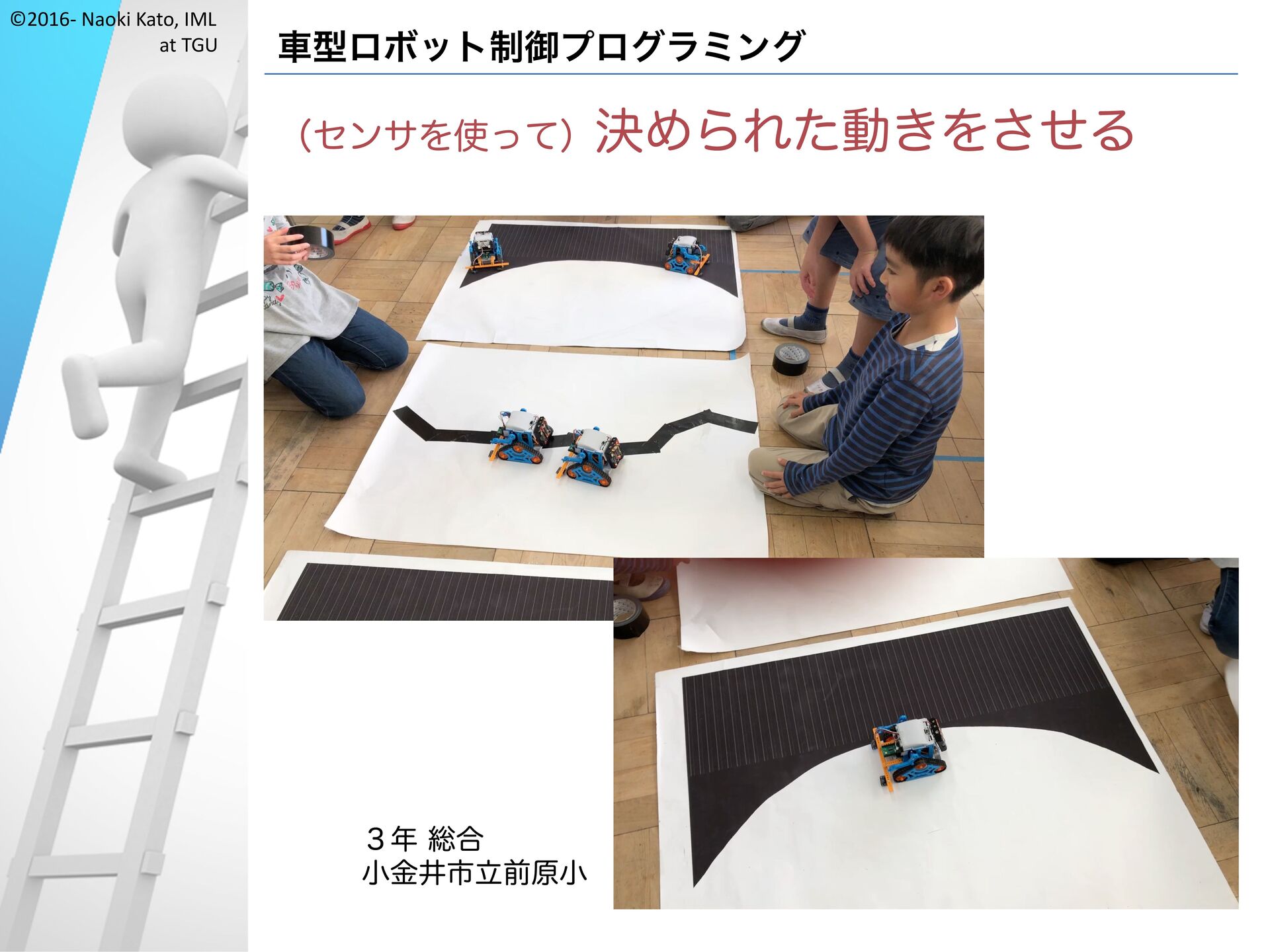
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)決められた動きをさせる 3年 総合
小金井市立前原小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング (センサを使って)考えたルートを走らせる 5年 総合
小金井市立前原小
©2016- Naoki Kato, IML at TGU 車型ロボット制御プログラミング ロボット制御プログラミングのポイント l 誤差を許容させる声かけ・手だてが重要
ある程度の誤差を 許容するコース
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 動かすプログラミング
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 かっこいい動きを創作する 5年 総合
東大和市立第二小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 相手を押し出す動きを考える 6年 課程外
小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 楽しい動きを創作する(光のパレード) 6年 図工
町田市立第五小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 楽しい動きを創作する(光のパレード) 6年 図工
小平第三小
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(倍数・公倍数) 小平市立小平第七小学校
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 算数に使ってみる(速さと時間と道のり) モータの誤差が(^^;;;;;
©2016- Naoki Kato, IML at TGU 車型ロボットの応用 理科に使ってみる(テコの原理) 小金井市立前原小学校
©2016- Naoki Kato, IML at TGU おしまい 動かすプログラミング
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}