Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
EnebularMeetup_CatTower
Search
NearMugi
March 25, 2019
Technology
260
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
EnebularMeetup_CatTower
NearMugi
March 25, 2019
More Decks by NearMugi
See All by NearMugi
nekoIoTLT_NearMugiLLM
nearmugi
0
420
nekoIoTLT_CatAndColorSensor
nearmugi
0
970
VisualProgramming_GoogleHome_LINE
nearmugi
1
630
EnebularMeetup_GoogleCalendar
nearmugi
0
310
nekoIoTLT_ToyAndVoiceAnalysis
nearmugi
0
410
nekoIoTLT_Demachi
nearmugi
0
470
nekoIoTLT_SearchBlackObject
nearmugi
1
710
nekoIoTLT_nekoDeeplearning
nearmugi
0
350
nekoIoTLT_nekoGohan
nearmugi
0
570
Other Decks in Technology
See All in Technology
小さいから、全部わかる。— 常駐AI "xangi" のすすめ
sugupoko
0
270
AIDLC_ヤフーショッピングの取り組み
lycorptech_jp
PRO
0
570
アカウントが増えてからでは遅い? ~ マルチアカウント統制の勘所 ~
kenichinakamura
0
190
最適な自走を最小限の支援で — M&Aで拡大する組織で少人数SREが挑んだ1年 / SRE NEXT 2026
genda
0
370
AIペネトレーションテスト・ セキュリティ検証「AgenticSec」紹介資料
laysakura
2
8.1k
LiDAR SLAMの実装とセンサ融合 ~Lie群からContinuous-Time LIOまで~
naokiakai
1
1k
CSに"SLO"は要らない、経営層に"99.9%"は伝わらない - SREを全社に"翻訳"する3原則
cscengineer
PRO
1
3.6k
product engineering with qa
nealle
0
150
次世代ランサムウェア対策の考察 / 20260704 Mitsutoshi Matsuo
shift_evolve
PRO
5
1.7k
なぜ私たちのSREプラクティスはなかなか機能しないのか 〜システムより先に組織を見る〜 / Why our SRE practices aren't really working
vtryo
2
2.7k
脱金融のフューチャー・デザイン / Future Design Beyond Finance
ks91
PRO
0
140
20260702_生成AIはどこまで成長するのか_チャットだけじゃない世界
doradora09
PRO
0
110
Featured
See All Featured
It's Worth the Effort
3n
188
29k
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
220
We Analyzed 250 Million AI Search Results: Here's What I Found
joshbly
1
1.5k
How to train your dragon (web standard)
notwaldorf
97
6.7k
[SF Ruby Conf 2025] Rails X
palkan
2
1.1k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.8k
Code Review Best Practice
trishagee
74
20k
Information Architects: The Missing Link in Design Systems
soysaucechin
0
1k
The AI Revolution Will Not Be Monopolized: How open-source beats economies of scale, even for LLMs
inesmontani
PRO
3
3.6k
Tell your own story through comics
letsgokoyo
1
990
Everyday Curiosity
cassininazir
0
250
Transcript
キャットタワーの観察 2019.3.25 enebular developer Meetup Vol.9
自己紹介 黒田 哲平 パチンコの商品企画部に所属、 業務でArduinoやUnityを使っています。 ネコ2匹飼っています。 2か月ほど前、dotstudioさんでブログ書きました。 「NefryBTからGoogleDriveにデータをアップロードする方法」 →今日はこの2つに関連した話です。
今回紹介したい事例 キャットタワーを定期的に撮影し、ネコがいるかどうか観察する カメラ キャットタワーの ハンモック
観察の仕方 1.キャットタワーを定期的に撮影 →NefryBT+カメラ 2.ネコがいるか判定 →NNC(Neural Network Console) 3.記録する →GoogleDrive、SpreadSheets 4.ネコがいたとき家族に知らせる
→LINE
enebular(とNode-RED)を使った理由 Node-REDを使えばスッキリまとめられるはず。 ↓ ただNode-REDを常時動かす環境は自宅のラズパイしかない (家だとあまり自分の時間が取れない…) ↓ enebularなら外出先でもサクッと作れる!
使用したツール その1 NefryBT →愛用するESP32搭載ボード。Wifiに簡単接続。 ユーザー情報をプログラムソース外で設定出来て便利。
使用したツール その2 NNC(Neural Network Console) →ニューラルネットワークを直感的に設計。 仕組みが良く分かっていなくても、ある程度識別できた。 0:いない 1:ネコ1 2:ネコ2 3:分からない
観察した画像を分類して学習。学習結果はPythonを使って利用できる。
使用したツール その3 Google Cloud Platform ・CloudFunctions →サーバーレスな実行環境。Node.js・Pythonに対応。 HTTPリクエストで実行して結果を受け取れる。 ・Storage →撮影したデータを保存。
全体の流れ
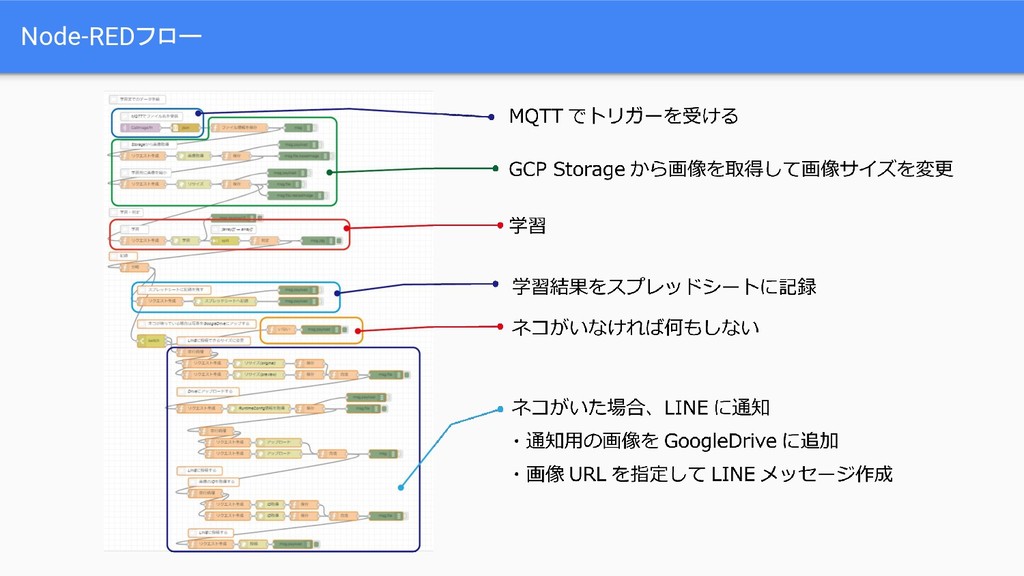
Node-REDフロー
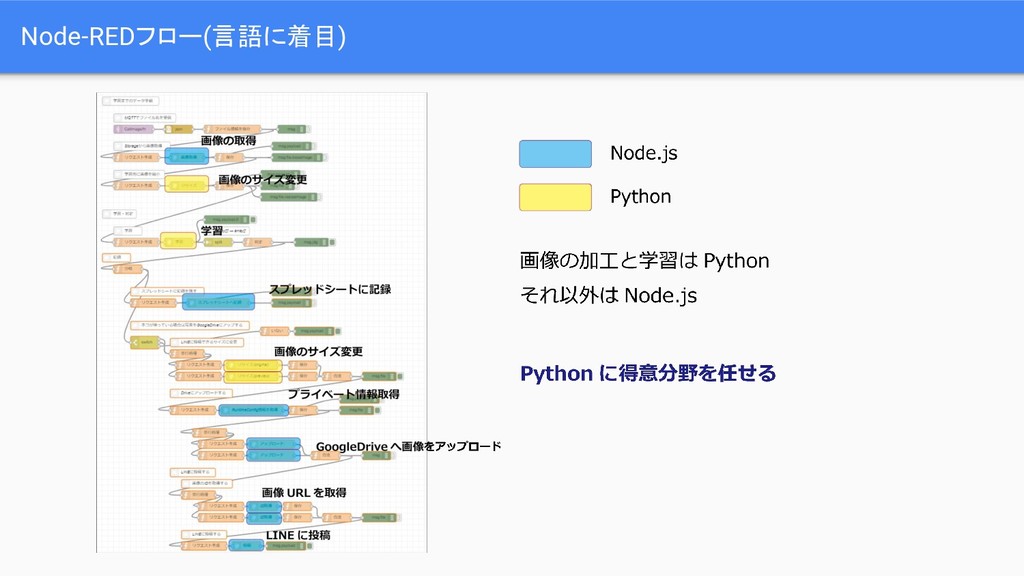
Node-REDフロー(言語に着目)
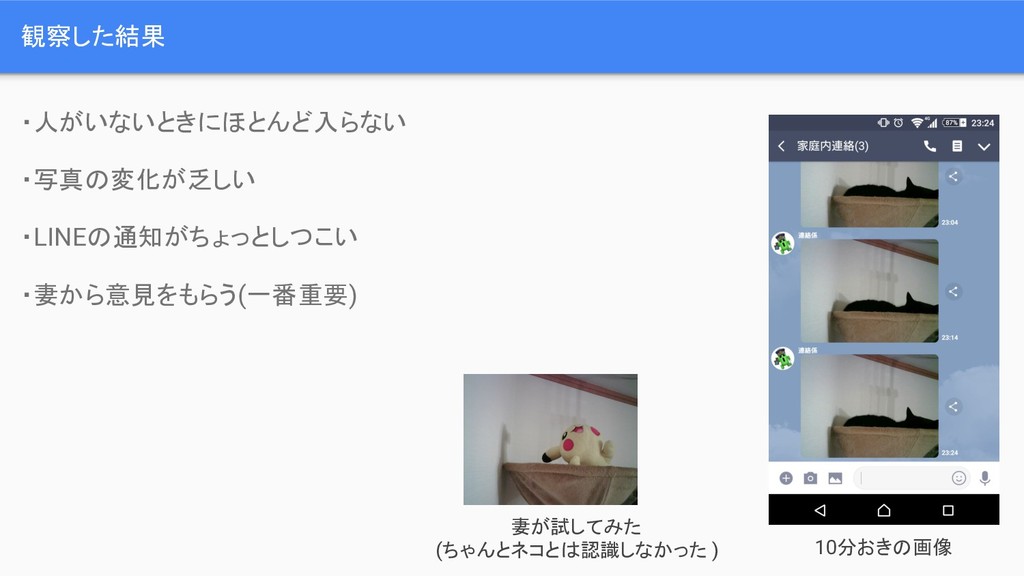
観察した結果 ・人がいないときにほとんど入らない ・写真の変化が乏しい ・LINEの通知がちょっとしつこい ・妻から意見をもらう(一番重要) 10分おきの画像 妻が試してみた (ちゃんとネコとは認識しなかった )
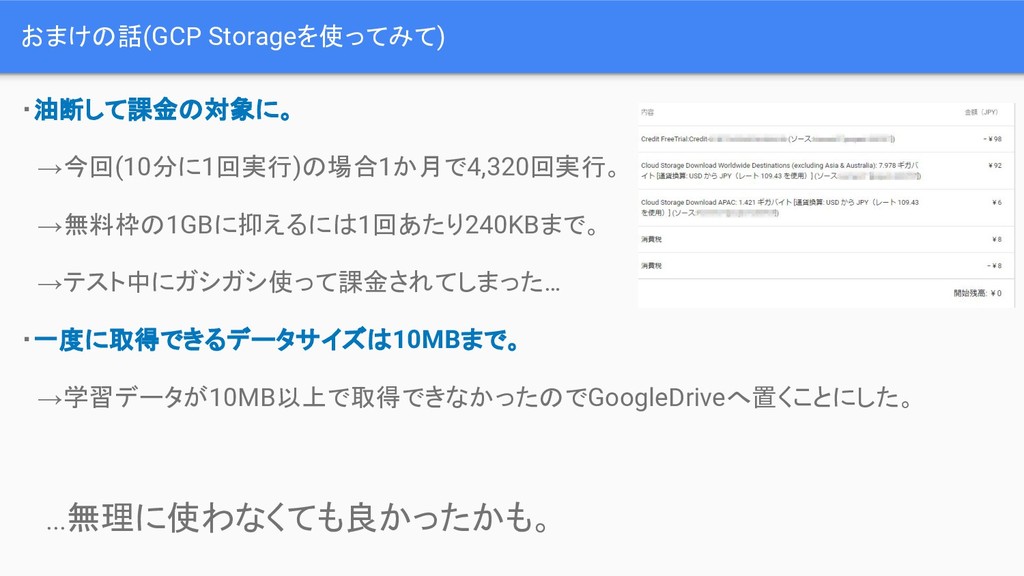
おまけの話(GCP Storageを使ってみて) ・油断して課金の対象に。 →今回(10分に1回実行)の場合1か月で4,320回実行。 →無料枠の1GBに抑えるには1回あたり240KBまで。 →テスト中にガシガシ使って課金されてしまった… ・一度に取得できるデータサイズは10MBまで。 →学習データが10MB以上で取得できなかったのでGoogleDriveへ置くことにした。 ...無理に使わなくても良かったかも。
まとめ ・インプットからアウトプットまで一括管理出来て便利。 ・パーツごとに言語を変えられて便利。得意分野を任せられる。 ・画像もテキストと同じように受け渡しできる。怖くない。 ・キャットタワーよりも違うものを観察したい。 以上となります。 ご清聴ありがとうございました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}