Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
nekoIoTLT_SearchBlackObject
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
NearMugi
October 21, 2020
Technology
710
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
nekoIoTLT_SearchBlackObject
NearMugi
October 21, 2020
More Decks by NearMugi
See All by NearMugi
nekoIoTLT_NearMugiLLM
nearmugi
0
420
nekoIoTLT_CatAndColorSensor
nearmugi
0
980
VisualProgramming_GoogleHome_LINE
nearmugi
1
630
EnebularMeetup_GoogleCalendar
nearmugi
0
310
nekoIoTLT_ToyAndVoiceAnalysis
nearmugi
0
410
nekoIoTLT_Demachi
nearmugi
0
470
nekoIoTLT_nekoDeeplearning
nearmugi
0
360
nekoIoTLT_nekoGohan
nearmugi
0
580
nekoIoTLT_Tsumetogi
nearmugi
1
750
Other Decks in Technology
See All in Technology
AI ネイティブな組織に Gemini Enterprise Agent Platform がなぜ必要なのか
asei
1
150
初めてのGitHub Actions / GitHub Actions at First
tooppoo
0
120
エンタープライズデータへ安全につなぐ Production-ready なエージェント設計 ― AI × MCP リファレンスアーキテクチャ ― #AIDevDay
cdataj
1
470
【5分でわかる】セーフィー エンジニア向け会社紹介
safie_recruit
0
53k
運用を犠牲にせずコストを制御し事業成長を支える B2B SaaS ID管理基盤におけるS3 Tableのログストレージ活用
kaminashi
1
140
タクシーアプリ『GO』の実践的データ活用〜位置情報データの収集とStreamlitでの可視化〜
mot_techtalk
2
150
20260722_品質と開発生産性の相互作用
magicpod
0
100
【Loop Engineeringの次に来る?】 人間中心デザインをもとにした Inquiry Engineeringを提唱したい
kotahisafuru
0
100
LangfuseによるLLMOps基盤の構築と活用事例
zozotech
PRO
1
250
toio・myCobotでフィジカルAIっぽいことを行うための検討(とりあえず調査) / フィジカルAI LT(IoTLTによる開催)
you
PRO
0
250
【CEDEC2026】コードレビュー支援ツール開発から学ぶ:LLMを用いた業務システムの実践的な運用設計と誤出力対策
cygames
PRO
0
210
AIは実装を速くする。では、私たちは何を今作るべきか?-立場を越えてリリースに向き合ったチーム開発の実践 / 20260801 Hiromi Nakaya and Naoki Takahashi
shift_evolve
PRO
3
270
Featured
See All Featured
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
200
First, design no harm
axbom
PRO
2
1.2k
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
A Tale of Four Properties
chriscoyier
163
24k
Gemini Prompt Engineering: Practical Techniques for Tangible AI Outcomes
mfonobong
2
470
Building a Modern Day E-commerce SEO Strategy
aleyda
45
9.2k
[SF Ruby Conf 2025] Rails X
palkan
2
1.2k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Chasing Engaging Ingredients in Design
codingconduct
0
250
The Curse of the Amulet
leimatthew05
2
13k
Public Speaking Without Barfing On Your Shoes - THAT 2023
reverentgeek
1
470
Beyond borders and beyond the search box: How to win the global "messy middle" with AI-driven SEO
davidcarrasco
3
190
Transcript
トイレにある黒い物体を検知する 2020.10.21 夜開催! ねこIoTLT vol.4
自己紹介 NearMugi(ニアムギ) ねこ2匹飼っています。
ねこ紹介 ニア ・3月8日生まれ 11歳 ・もふもふでかわいい ・寒くなってきたのでさらにもふもふに
ねこ紹介 ムギ ・5月8日生まれ 8歳 ・黒猫でかわいい ・メーメー鳴く ・この子も少し毛が伸びた
イントロ みなさんのおうちでこんなこと ありませんか?
イントロ ねこがトイレの前でじっとしている…
イントロ トイレを見てみると中に 黒い物体が。
イントロ 「これを取ってくれ」と言わんばかりに 立っている。
イントロ すぐに取ってあげたい。 気づいてあげたい。
イントロ IoTで解決してみます。
1.トイレの様子を定期的に撮影 2.撮影した画像から黒い物体を検知 3.LINEで通知 大まかな手順
・30分ごとに撮影する ・部屋の明るさの変化を考慮する ・前回撮影した画像と似ている場合は通知しない ・機械学習は使わずに黒い物体を検知する 細かい仕様
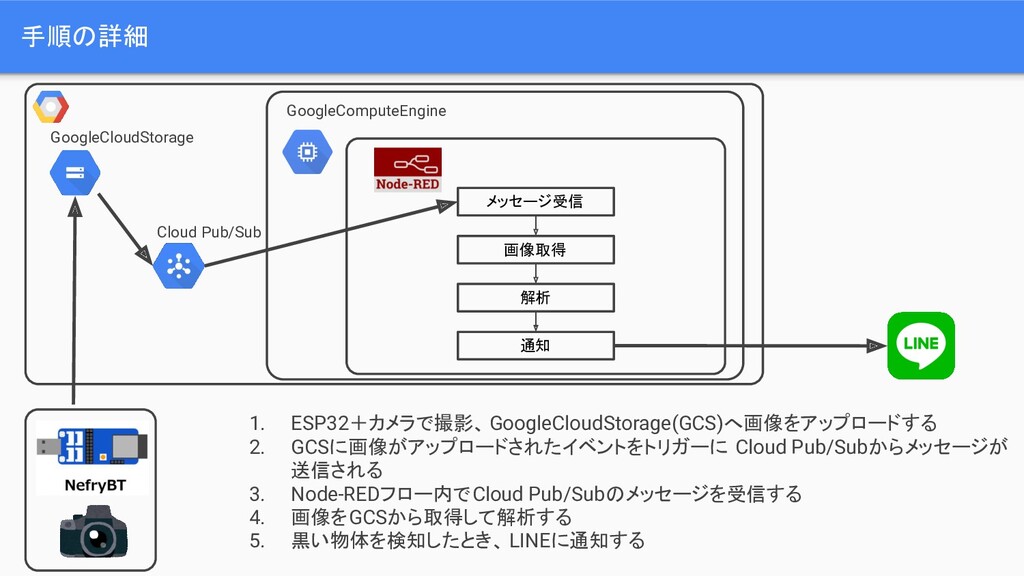
1. ESP32+カメラで撮影、GoogleCloudStorage(GCS)へ画像をアップロードする 2. GCSに画像がアップロードされたイベントをトリガーに Cloud Pub/Subからメッセージが 送信される 3. Node-REDフロー内でCloud Pub/Subのメッセージを受信する
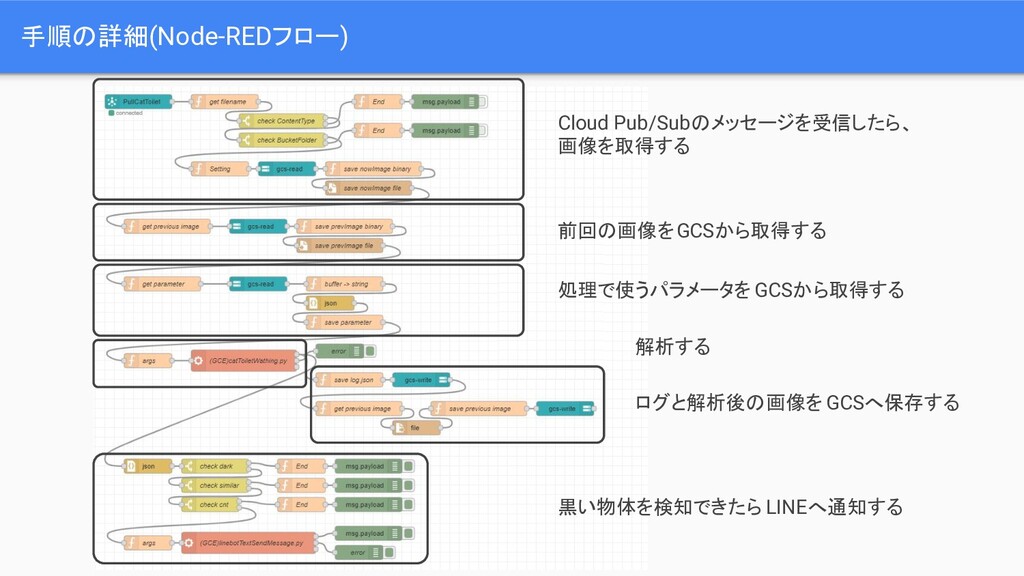
4. 画像をGCSから取得して解析する 5. 黒い物体を検知したとき、 LINEに通知する 手順の詳細 GoogleCloudStorage Cloud Pub/Sub GoogleComputeEngine メッセージ受信 画像取得 解析 通知
Cloud Pub/Subのメッセージを受信したら、 画像を取得する 手順の詳細(Node-REDフロー) 前回の画像をGCSから取得する 処理で使うパラメータを GCSから取得する 解析する ログと解析後の画像を GCSへ保存する
黒い物体を検知できたら LINEへ通知する
黒い物体の検知方法 黒い物体を検知するため OpenCVを使いました
黒い物体の検知方法 カメラで撮った画像 → 2値化(白黒)→白黒反転→輪郭を検出→面積を取得 → 面積の大きさから黒い物体があるか判断 画像から黒い物体を検知するまでの処理
黒い物体の検知方法 adaptiveThreshold : 画像をいい感じに2値化(白黒)する findContours : 黒い背景から白い物体の輪郭を検出する contourArea : 輪郭内の面積を取得する
OpenCVの関数
黒い物体の検知方法 -関数の説明(adaptiveThreshold) 元画像 void adaptiveThreshold(const Mat& src, Mat& dst, double maxValue,
int adaptiveMethod, int thresholdType, int blockSize, double C) 定数Cを変化させることで、白黒の範囲を調整できる C:10 白黒割合:0.29 C:20 白黒割合:0.23 C:30 白黒割合:0.18 C:40 白黒割合:0.13 C:60 白黒割合:0.06 C:70 白黒割合:0.04 C:80 白黒割合:0.03 C:90 白黒割合:0.02 C:50 白黒割合:0.09 ここらへんがちょうど良い
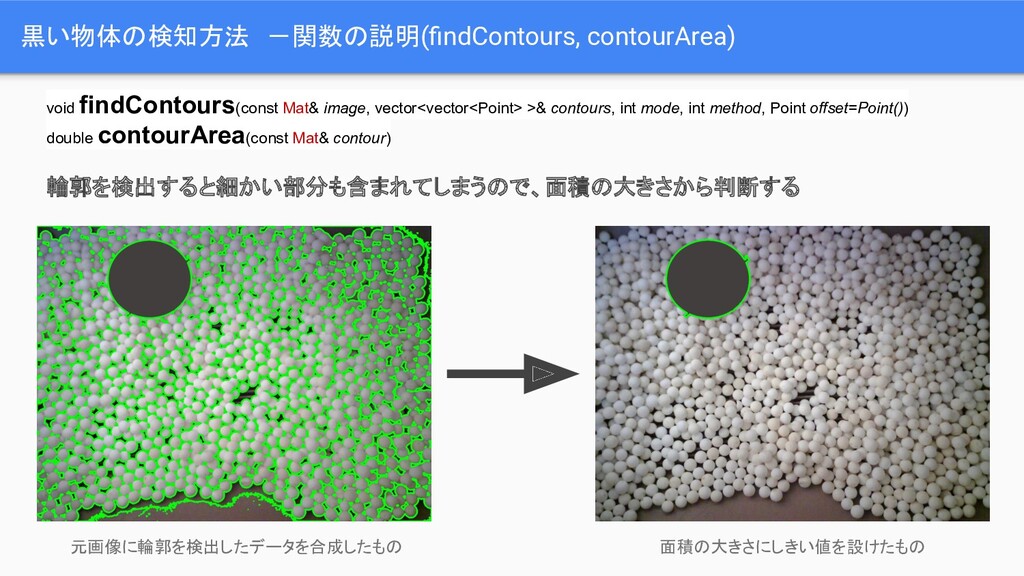
黒い物体の検知方法 -関数の説明(findContours, contourArea) void findContours(const Mat& image, vector<vector<Point> >& contours, int
mode, int method, Point offset=Point()) double contourArea(const Mat& contour) 輪郭を検出すると細かい部分も含まれてしまうので、面積の大きさから判断する 元画像に輪郭を検出したデータを合成したもの 面積の大きさにしきい値を設けたもの
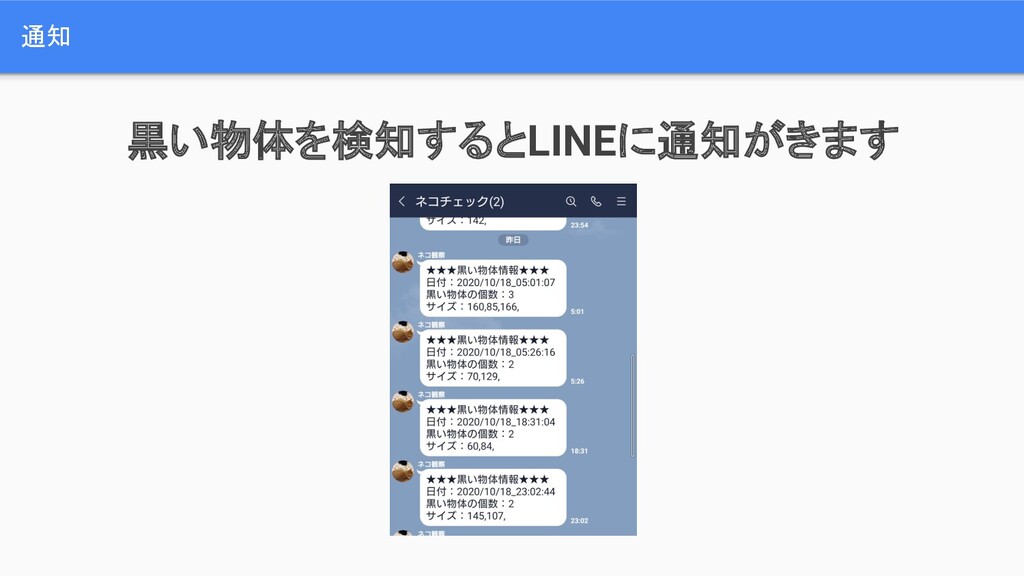
通知 黒い物体を検知するとLINEに通知がきます
結果 検出結果をお見せしたいのですが、 黒い物体があれなので 今回は控えさせていただきます。 そこそこの検出具合でした。 明るさの調整が一番難しいです。
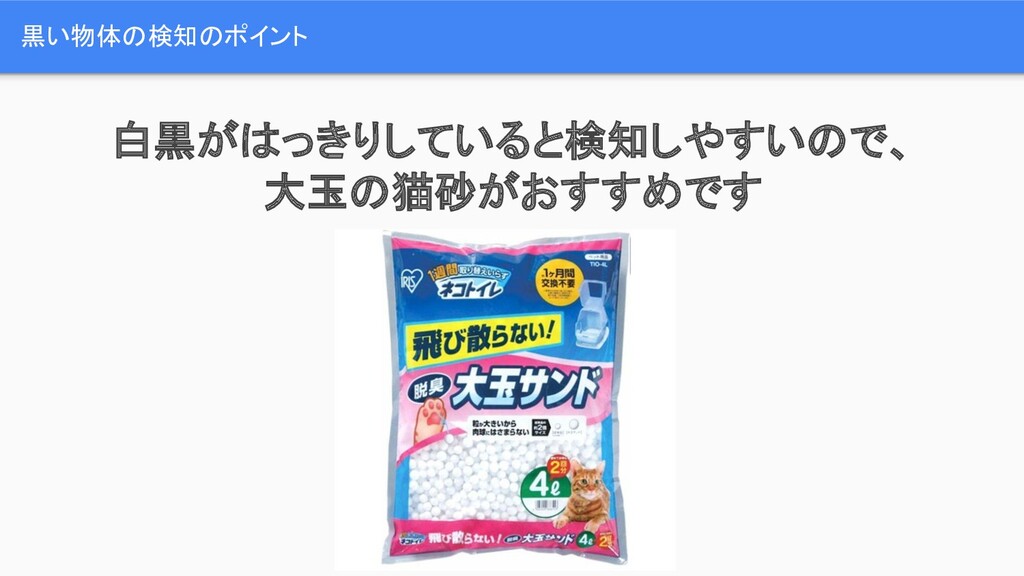
黒い物体の検知のポイント 白黒がはっきりしていると検知しやすいので、 大玉の猫砂がおすすめです
まとめ ・機械学習を使わなくてもある程度の検知が出来ると知りました。 照度センサーなどの補助があればもう少し精度が上がりそうです。 ・検知しやすくさせるため砂を平らにならしたり、砂の汚れ具合を 気にするようになりました。 以上となります。 ご清聴ありがとうございました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}