determinar pares (, ) ∈ ℂ × ℂ que tornam equação = verdadeira. Atenção, Loirinha e Surfista, o espaço das soluções (, ) do problema de autovalores e autovetores é ℂ × ℂ.
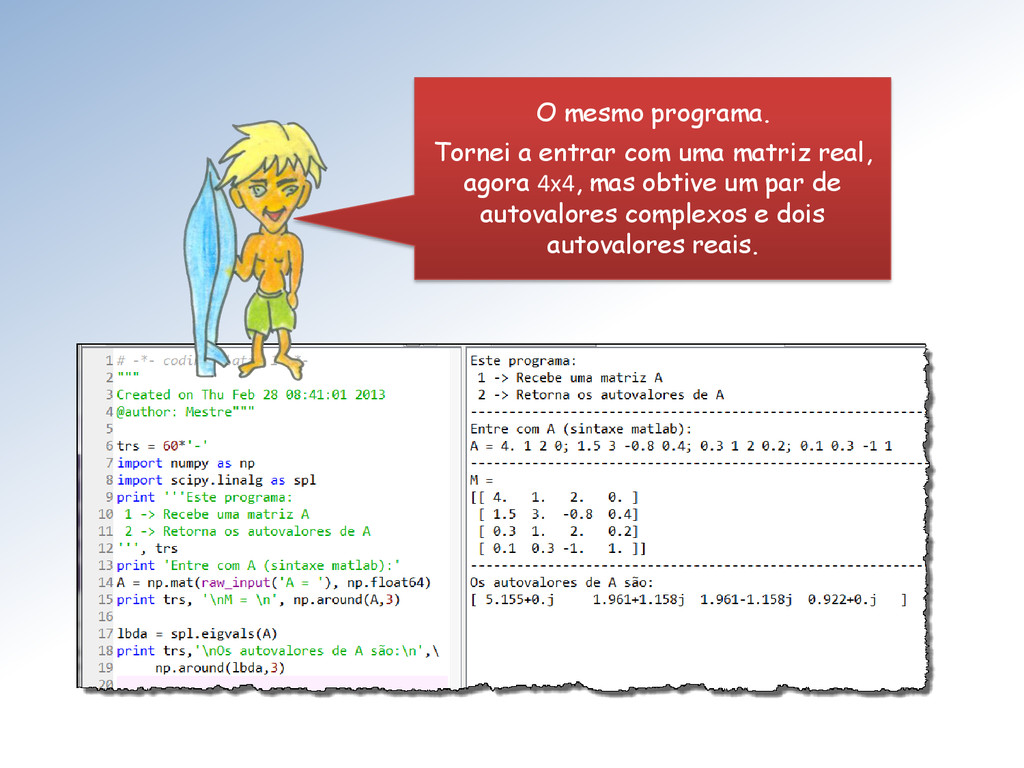
uma solução para o problema de autovalores/autovetores = de uma matriz real A, então o par , dos complexos conjugados correspondentes, também é solução para = . Sim pois da identidade = segue = = . Como A é uma matriz real, temos = e portanto = = = .
e também = 0 por linearidade. Então = torna-se uma identidade trivial, que é sempre verdadeira não importa qual seja ∈ ℂ. Entretanto, não há restrição alguma sobre λ. Poderemos ter = 0 ? Mestra, por que exige-se ≠ 0 na definição do problema de autovalores/autovetores?
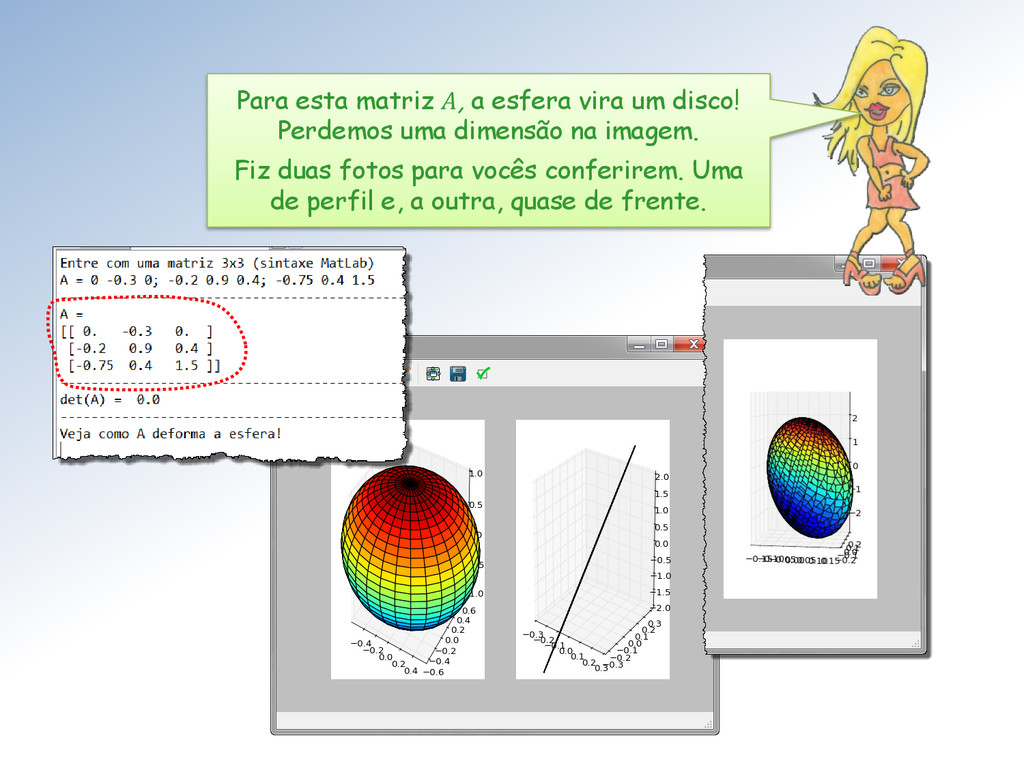
, associado a um autovetor ≠ 0 então = 0. Portanto não é inversível. Reciprocamente, se ≠ 0 não é inversível, então = 0 para algum vetor ≠ 0. Portanto 0 é um autovalor de , associado a , já que = 0.
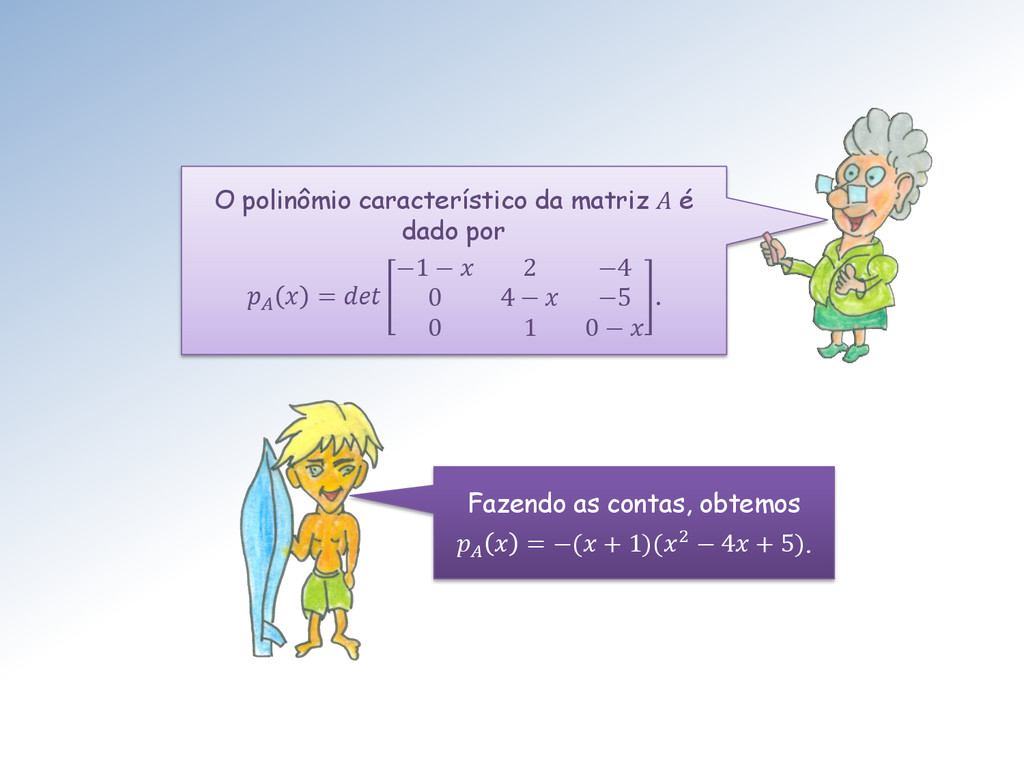
polinômio característico de A, isto é, = 0 O polinômio característico de uma matriz A é definido por = det( − ). Ele é um polinômio mônico. Da definição de autovalores e autovetores, é imediato que (prove Loirinha):
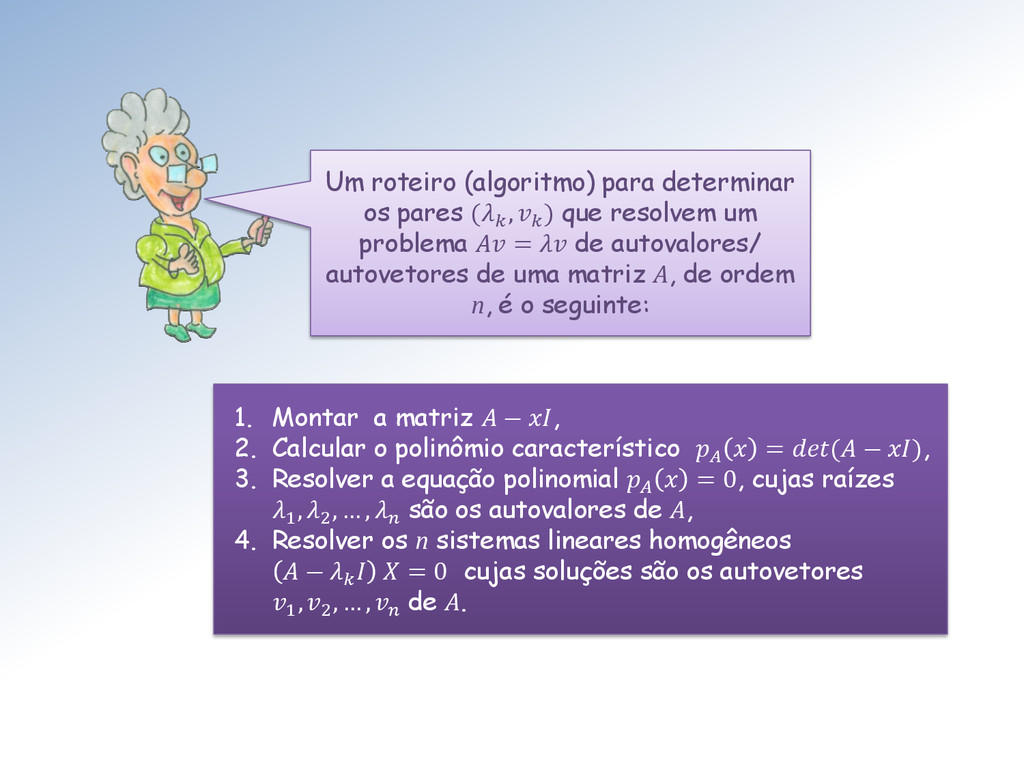
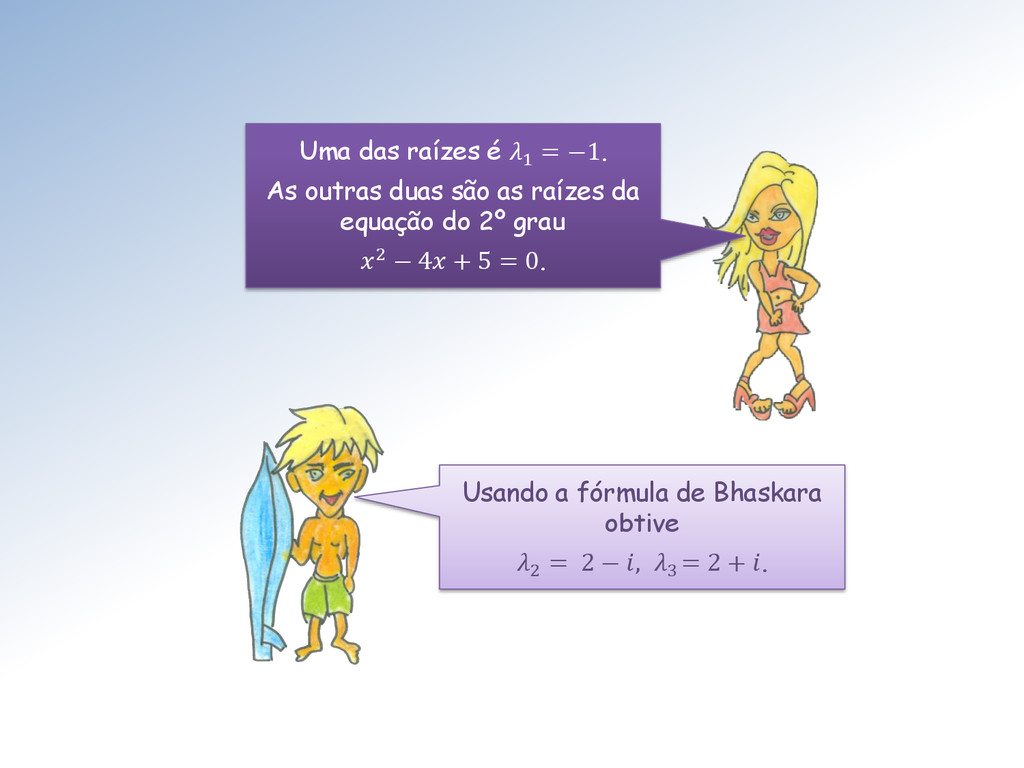
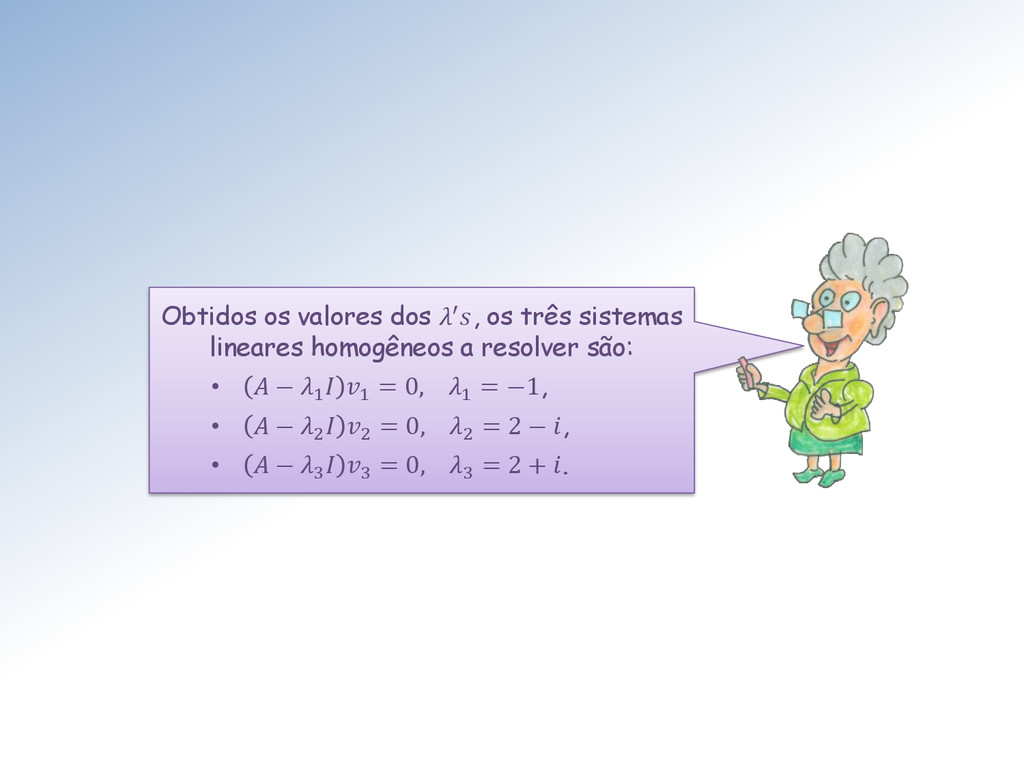
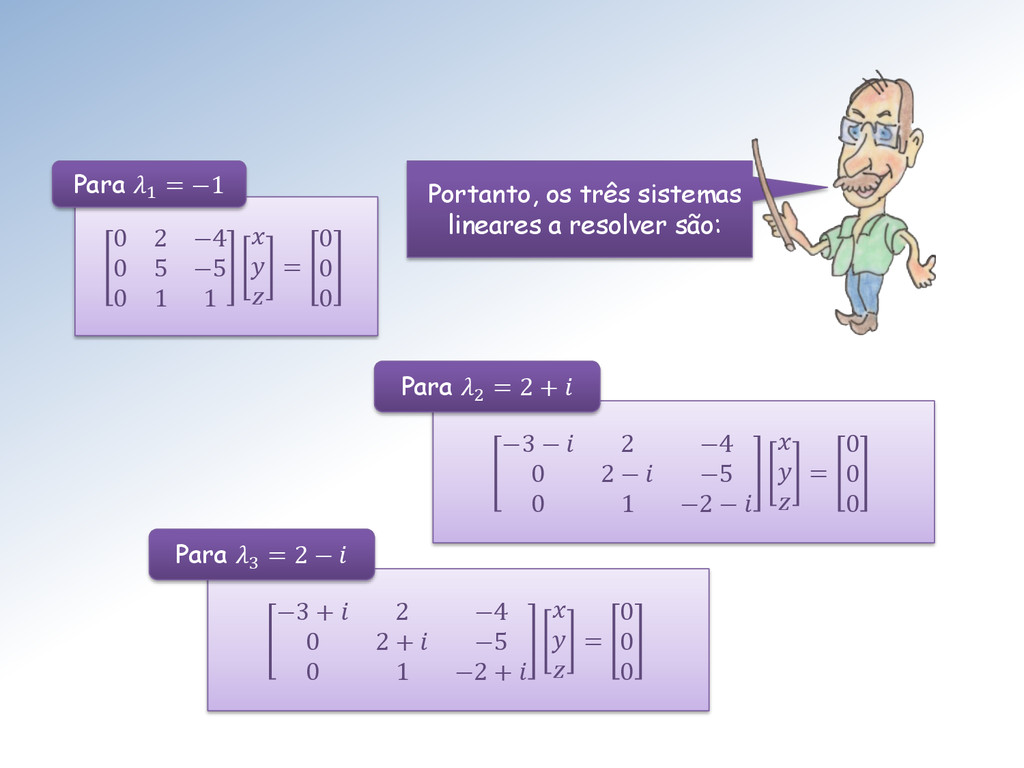
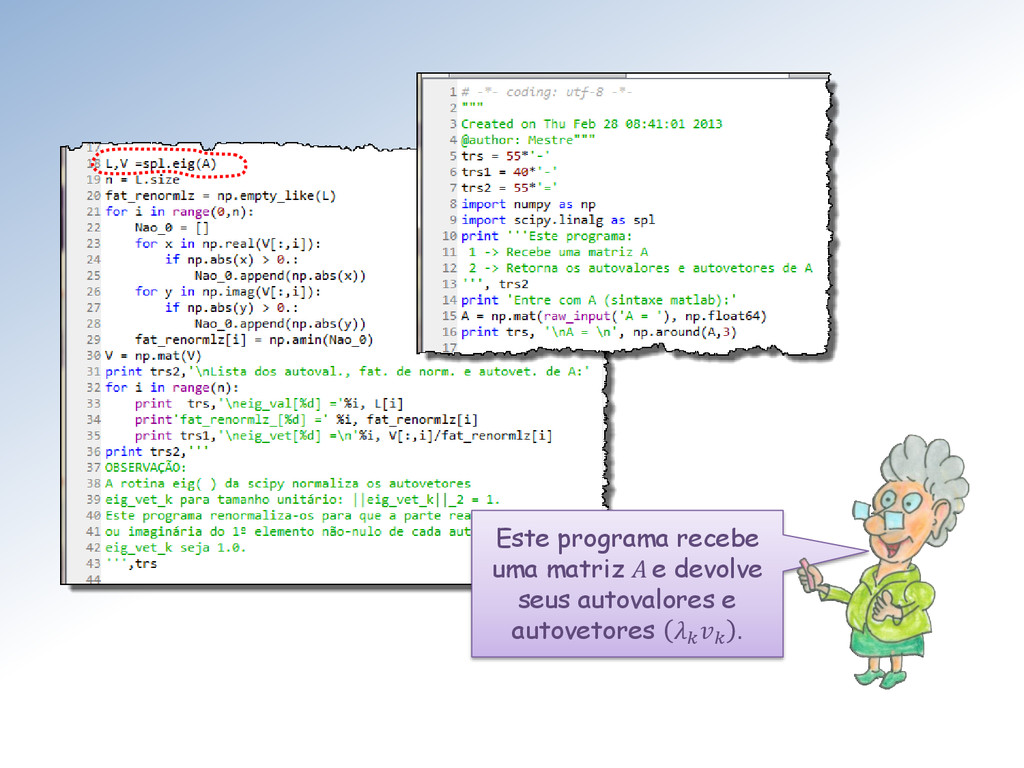
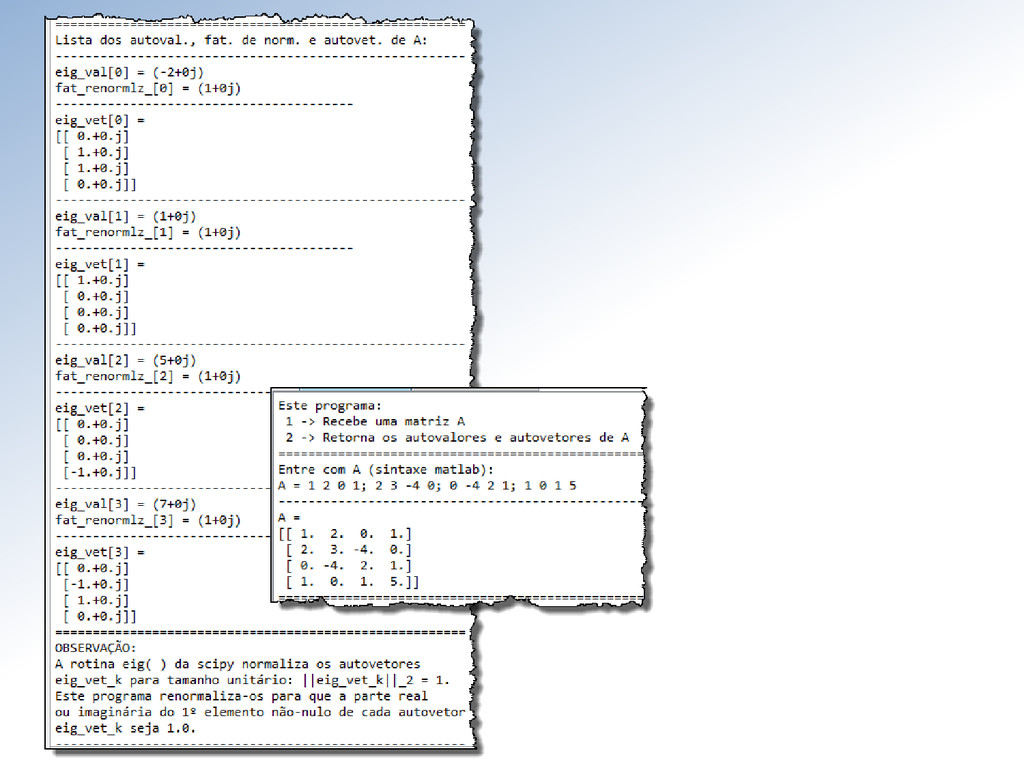
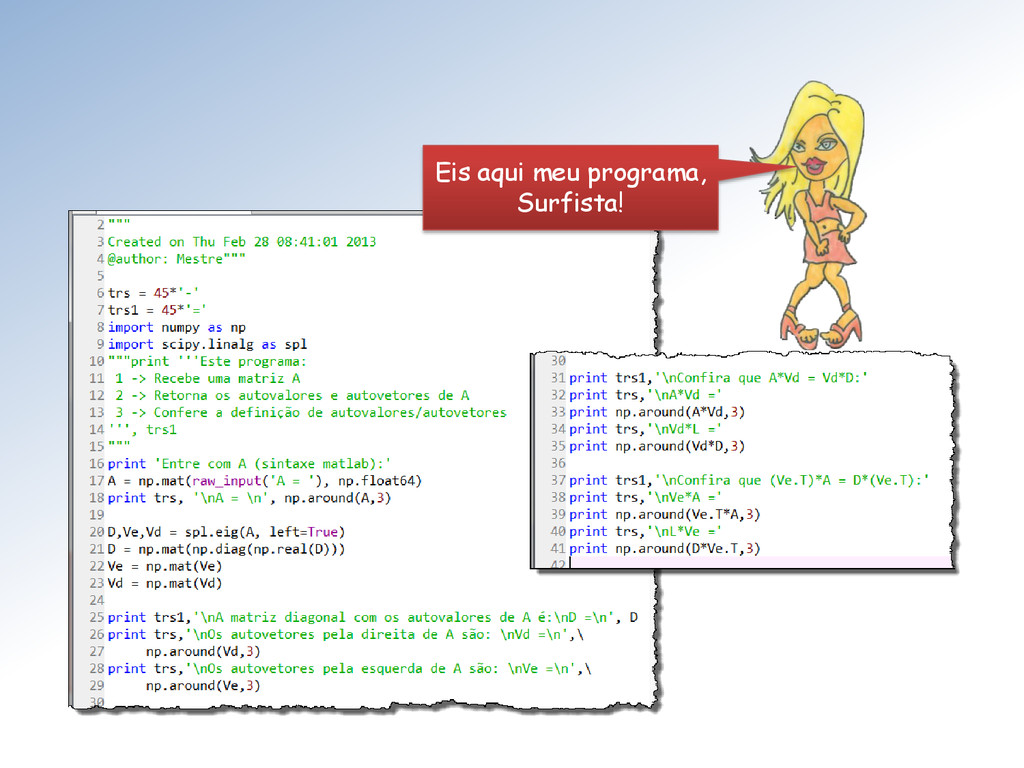
que resolvem um problema = de autovalores/ autovetores de uma matriz A, de ordem n, é o seguinte: 1. Montar a matriz − , 2. Calcular o polinômio característico = ( − ), 3. Resolver a equação polinomial = 0, cujas raízes 1 , 2 , … , são os autovalores de A, 4. Resolver os n sistemas lineares homogêneos − = 0 cujas soluções são os autovetores 1 , 2 , … , de A.
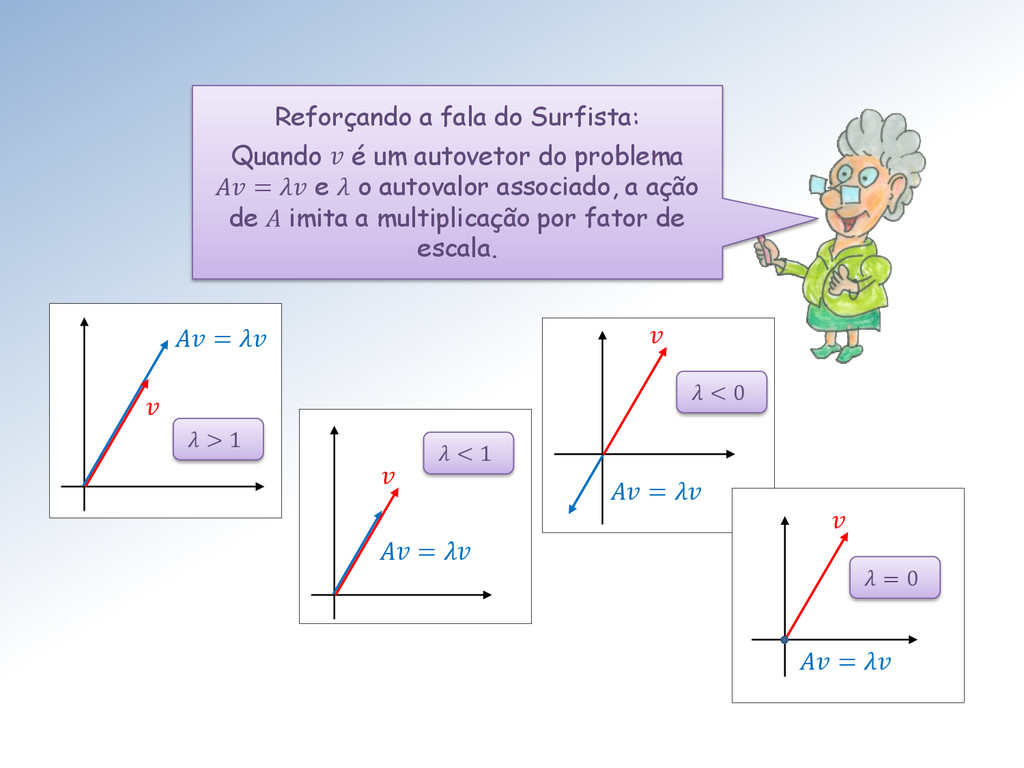
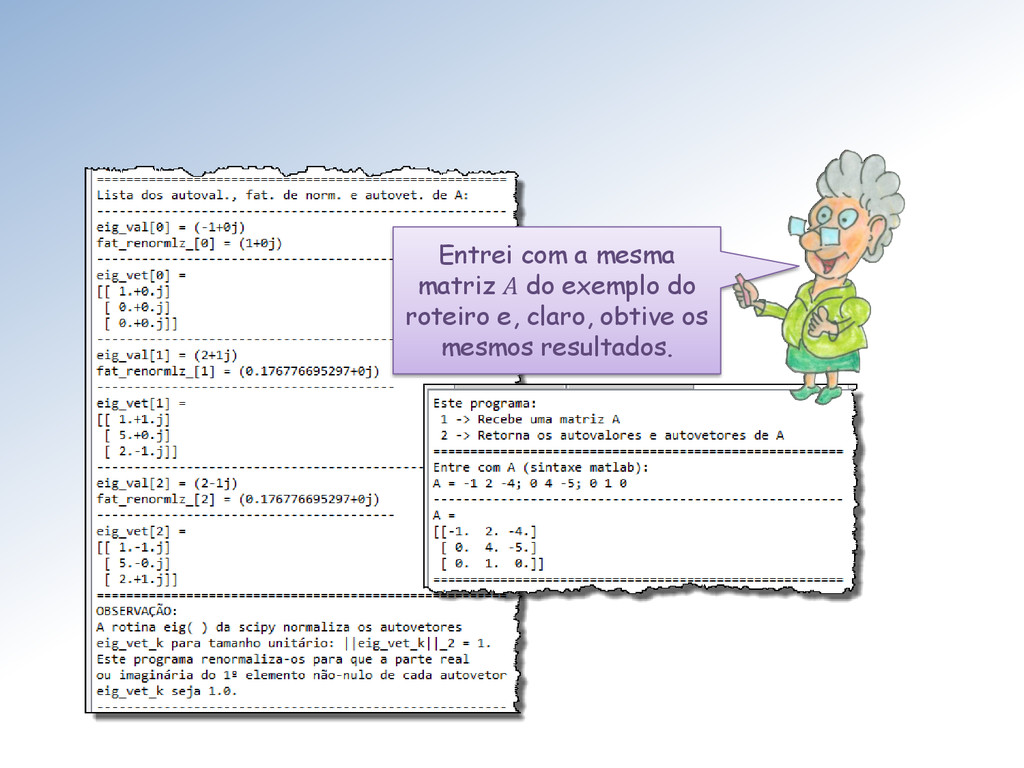
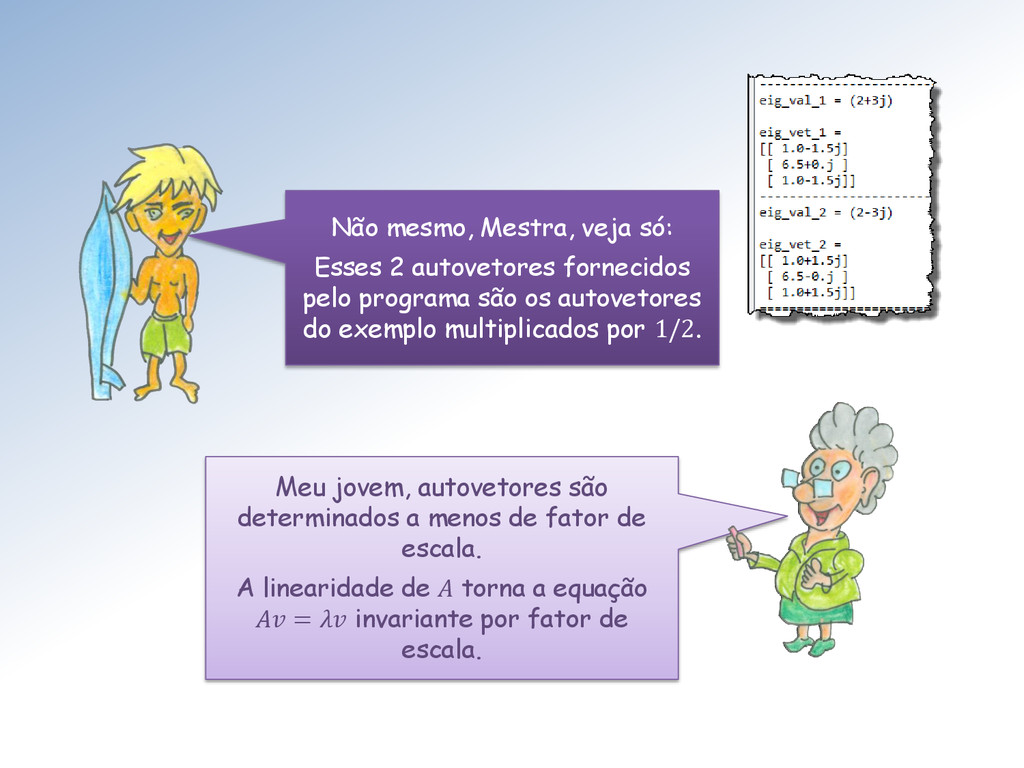
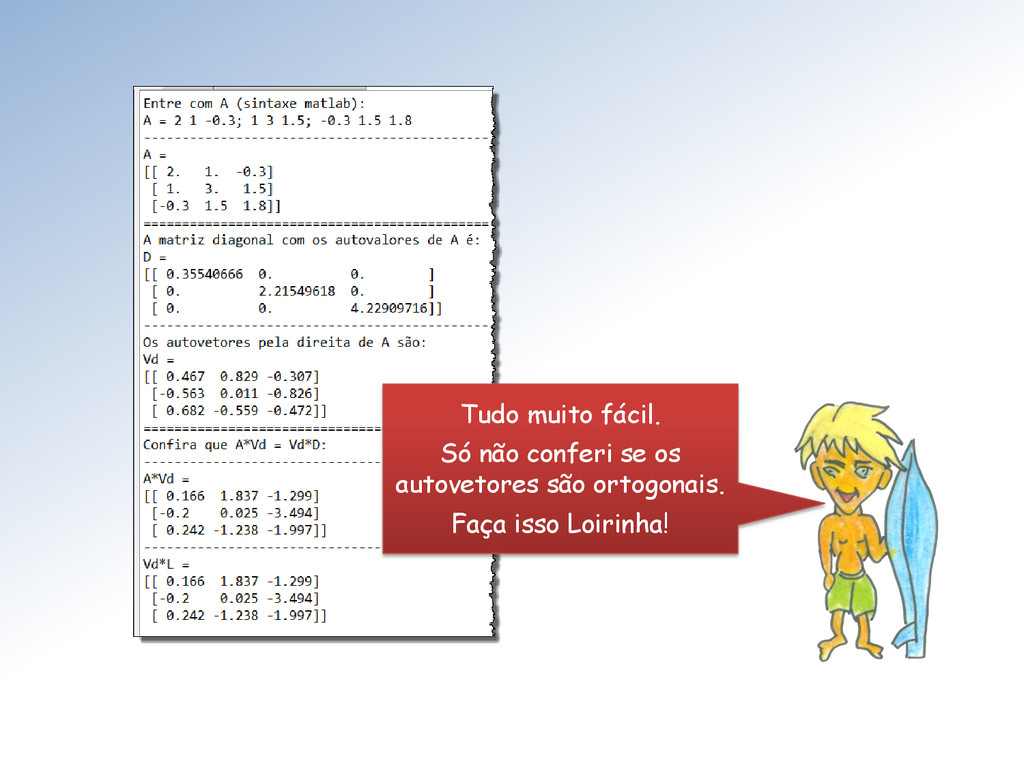
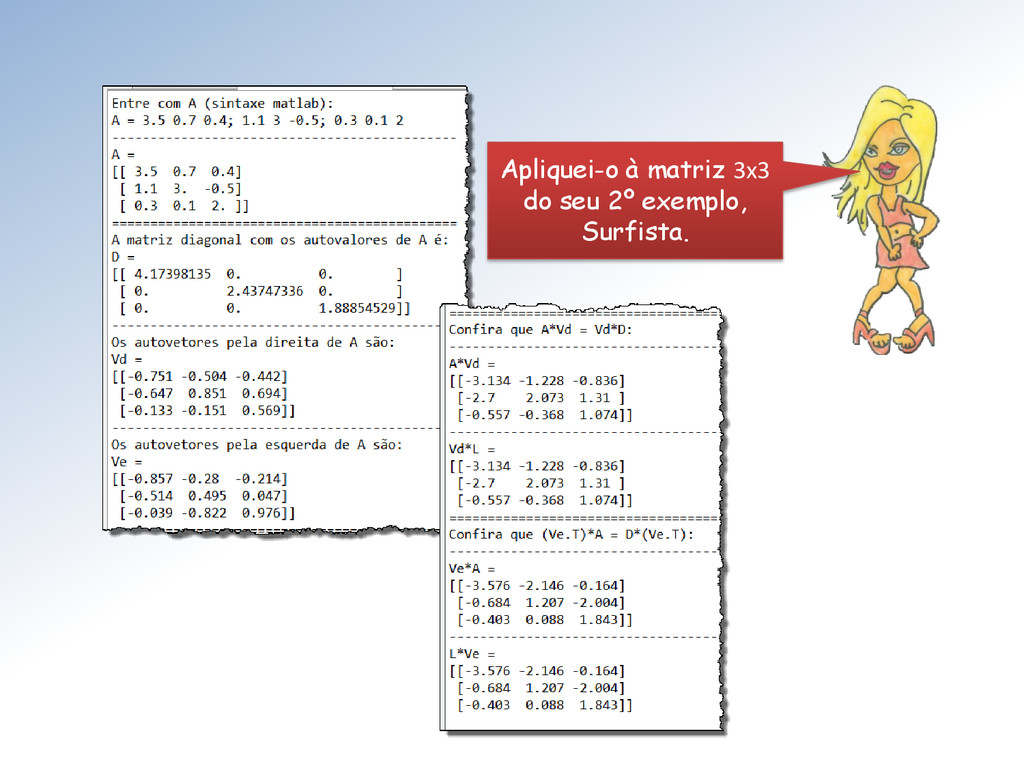
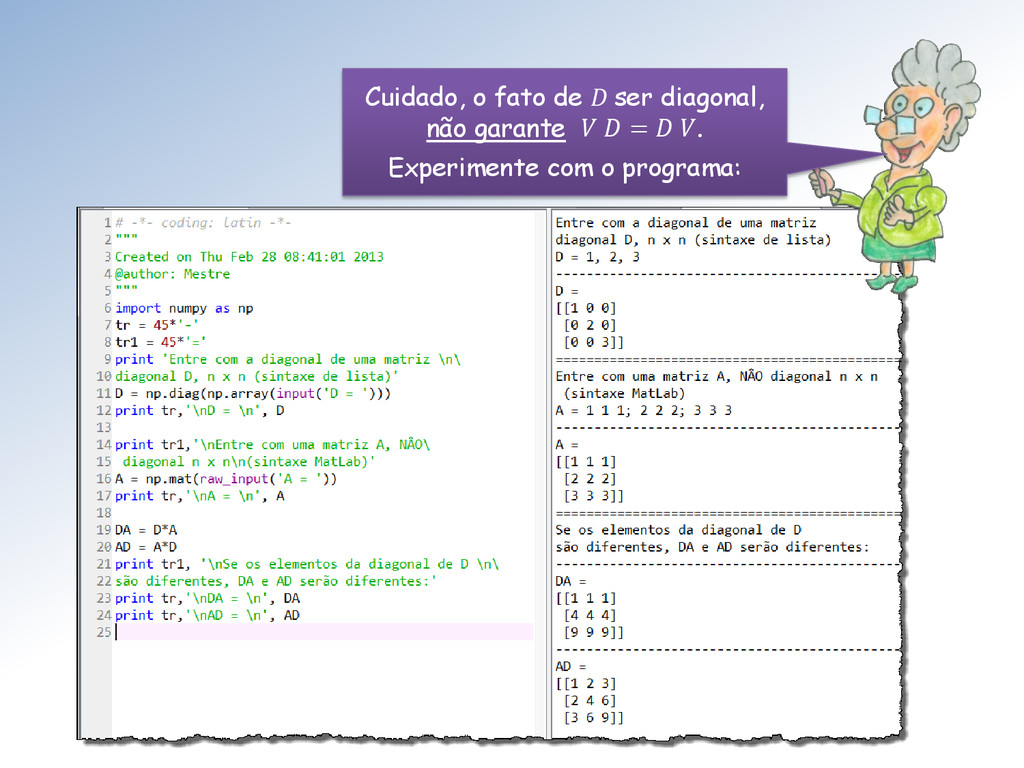
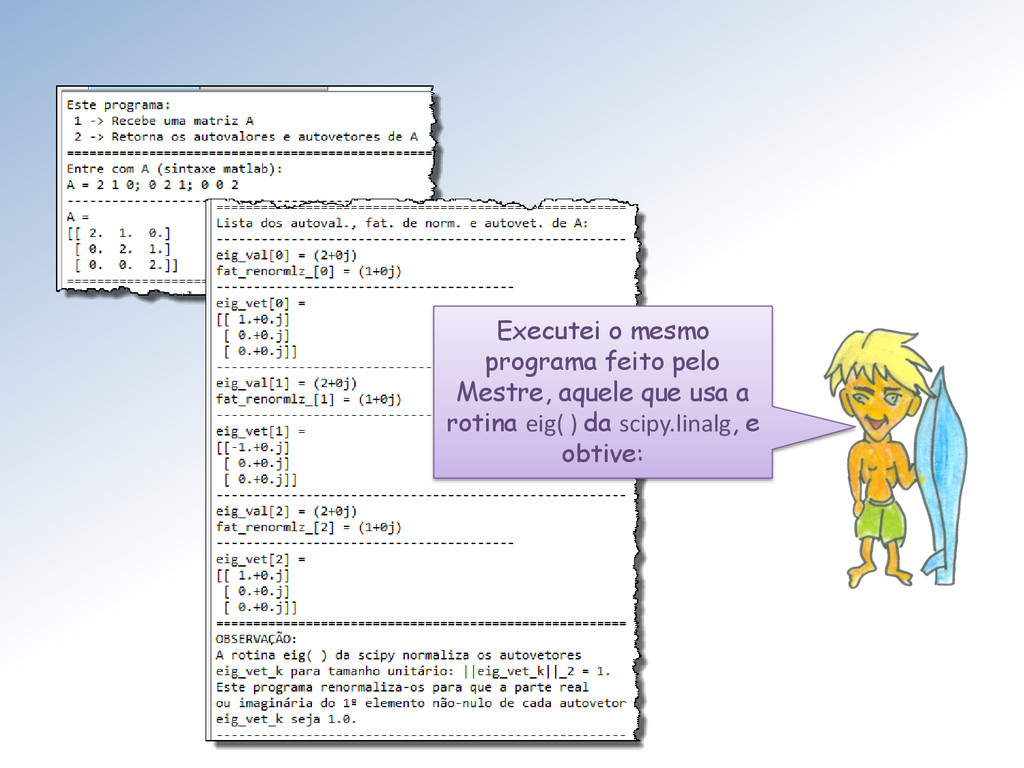
escala. A linearidade de A torna a equação = invariante por fator de escala. Não mesmo, Mestra, veja só: Esses 2 autovetores fornecidos pelo programa são os autovetores do exemplo multiplicados por 1/2.
2 os autovetores correspondentes. Se os autovalores são distintos 1 ≠ 2 então os autovetores 1 e 2 são LI e vice-versa. Mestre anuncie o resultado mais importante a respeito dos autovalores e autovetores de uma matriz quadrada A de ordem.
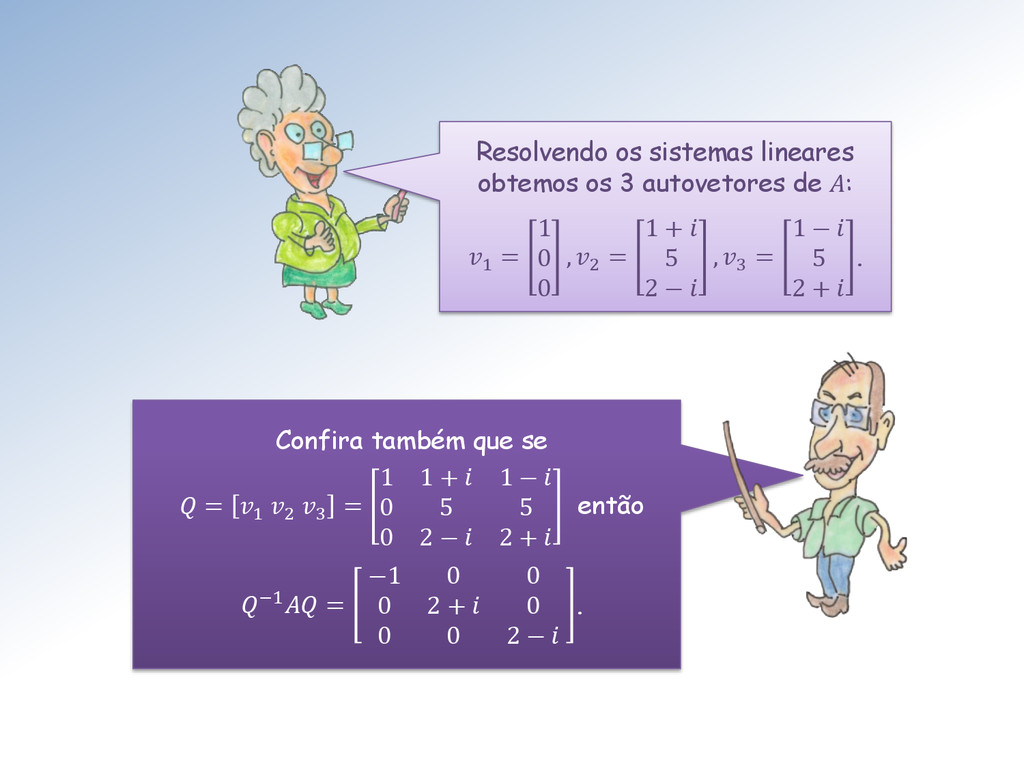
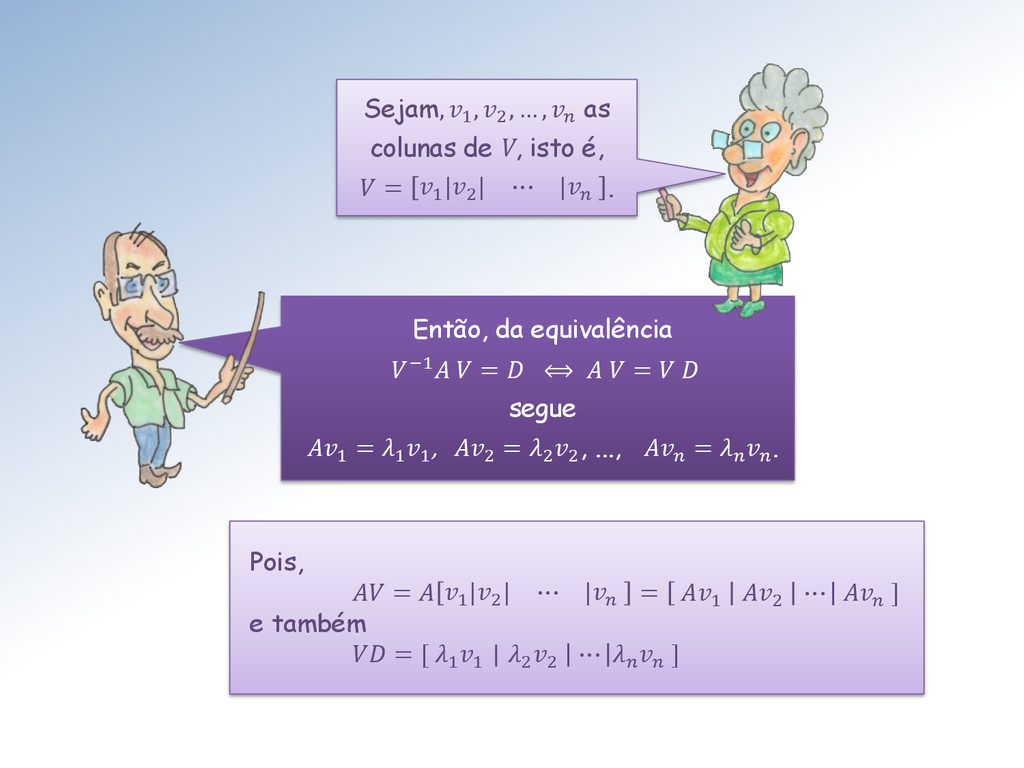
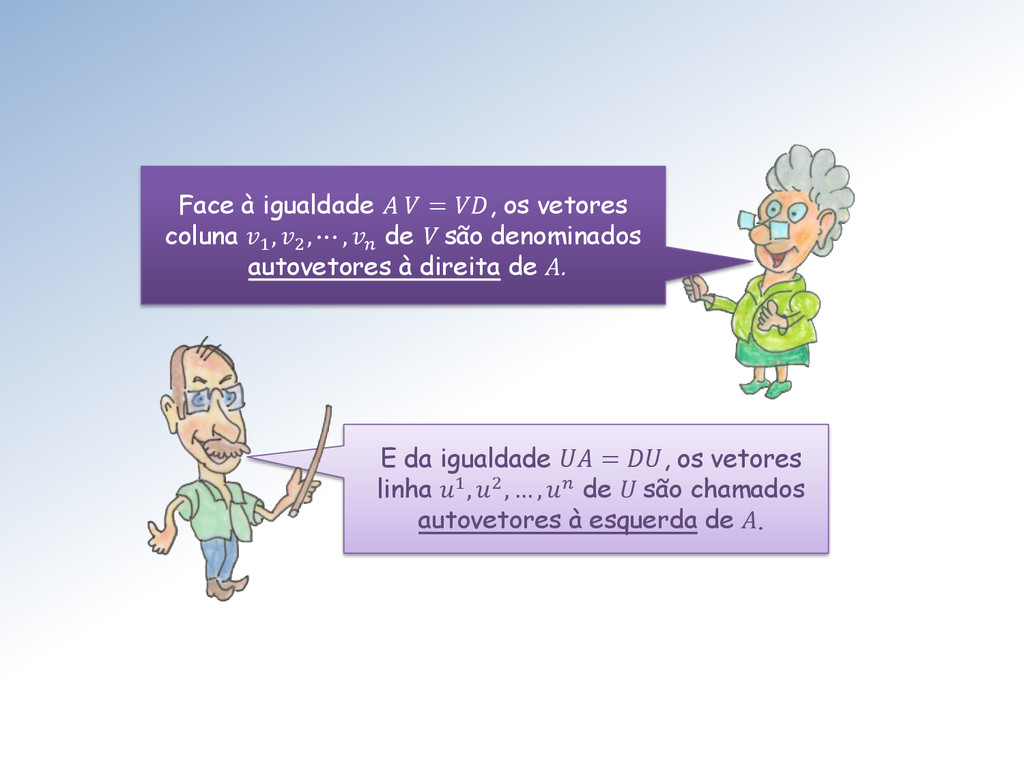
2 , … de A são todos distintos então eles constituem uma base para ℂ. Nessa base a matriz A é diagonalizável. Seja Q uma matriz formada com os autovetores de A, = 1 2 … . Então das n equações definidoras da relação autovalor/autovetor, = , segue a relação matricial = , na qual D é a matriz diagonal = (1 , 2 , … , ). Em outras palavras, −1 = .
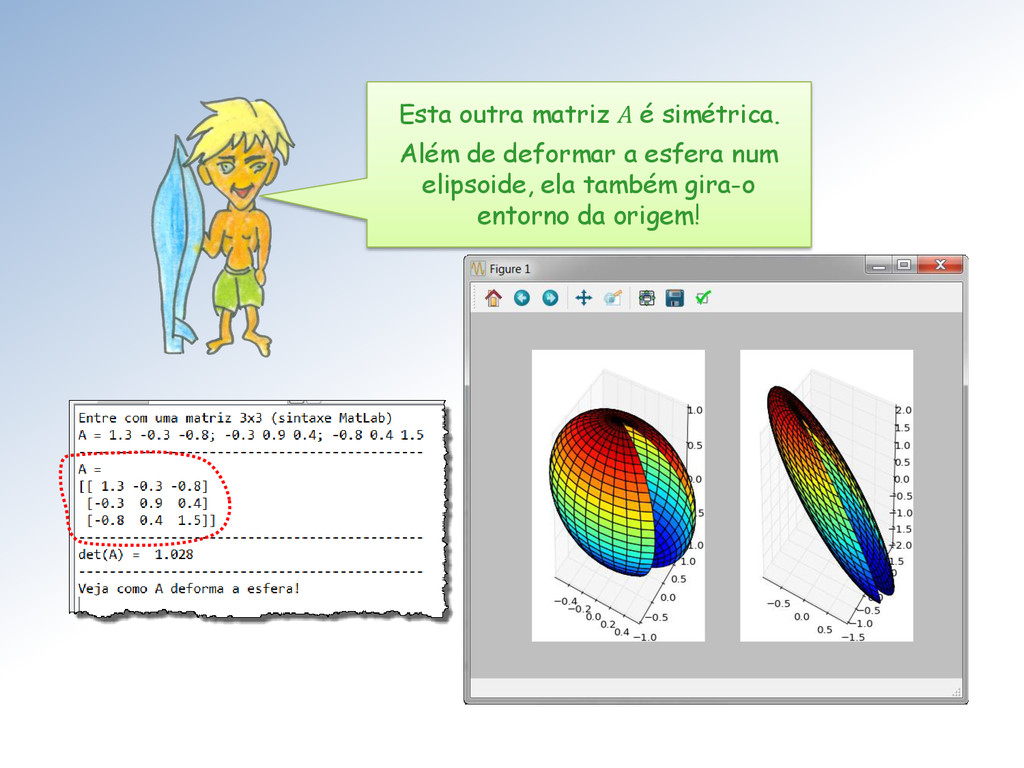
autovalores 1 , 2 , … , são distintos então os autovetores 1 , 2 , … formam uma base ortogonal para ℝ. Consequentemente a matriz = 1 2 … formada com os autovetores de A é uma matriz ortogonal, isto é, = . Assim, = , com = (1 , 2 , … , ).
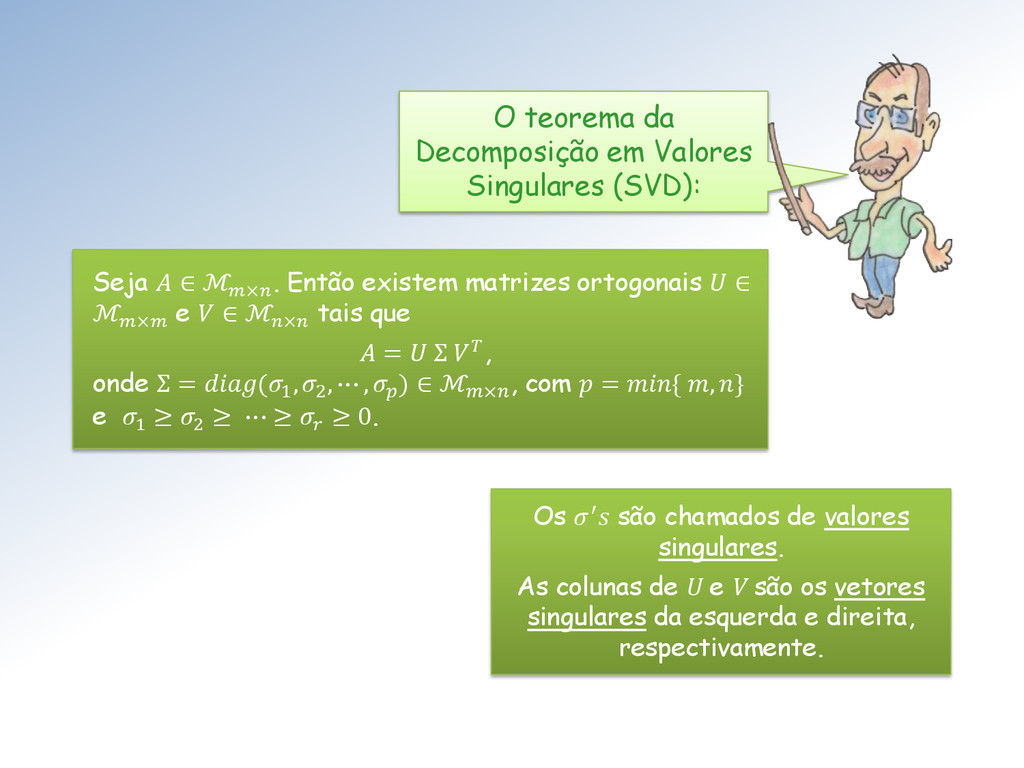
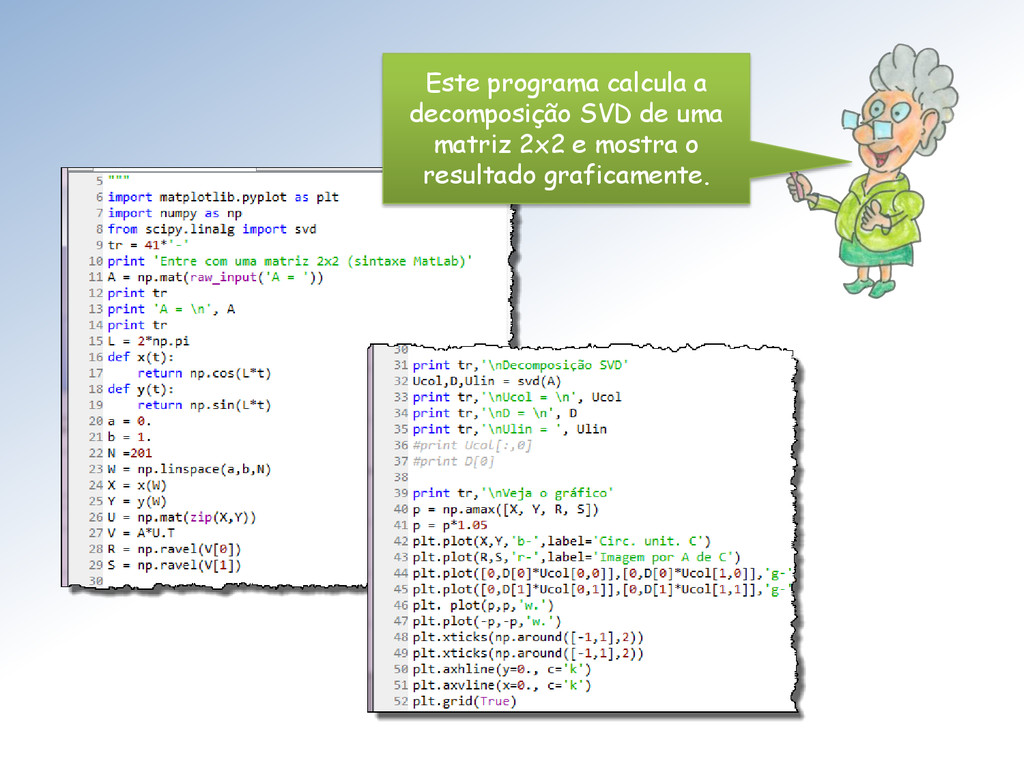
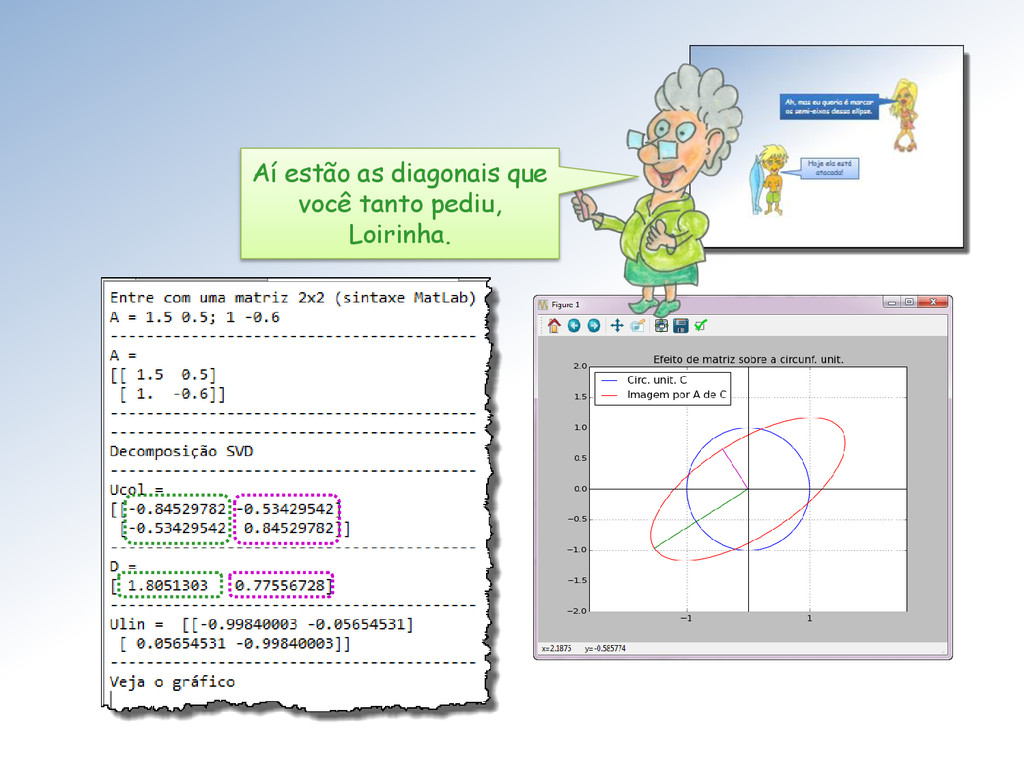
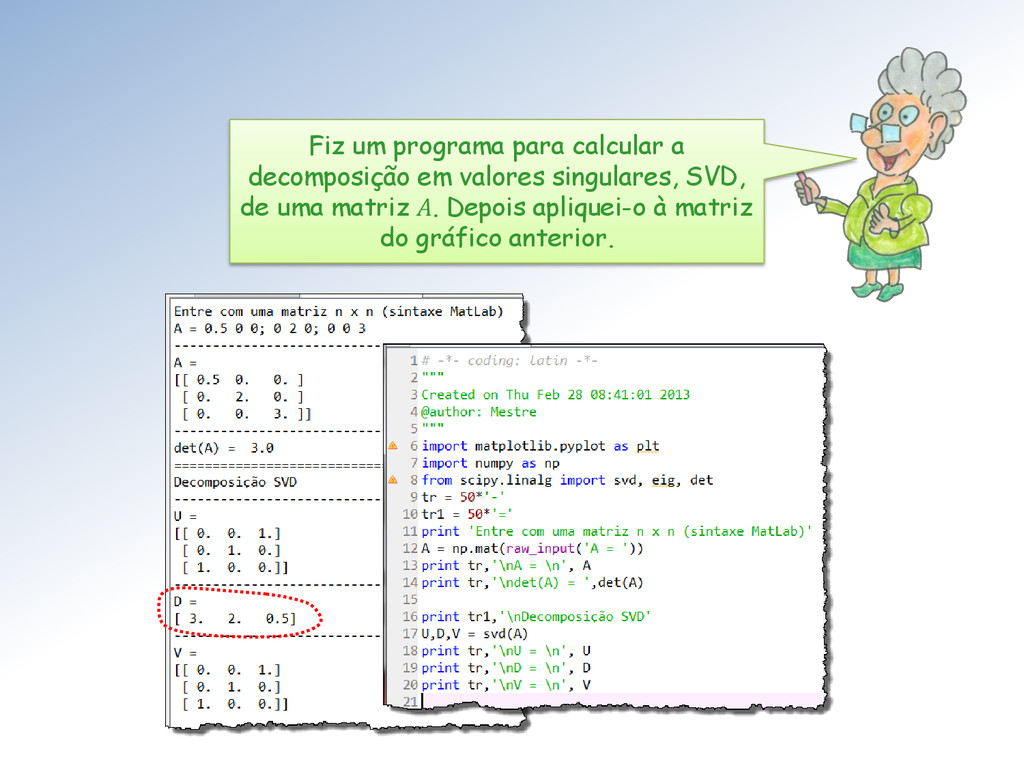
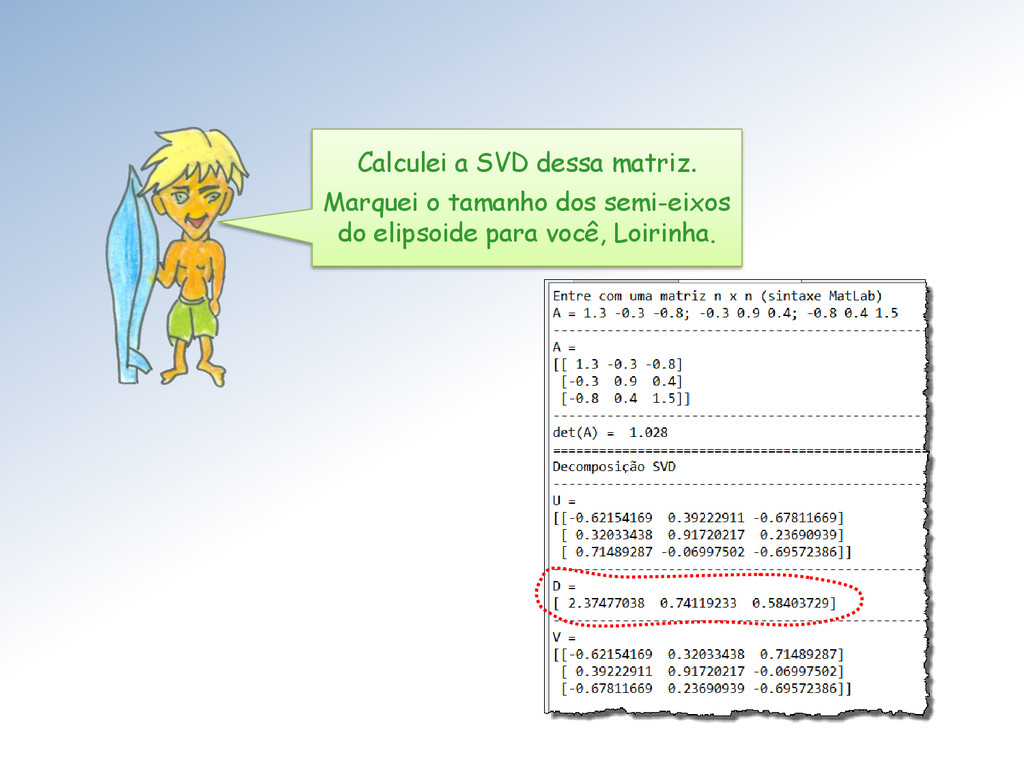
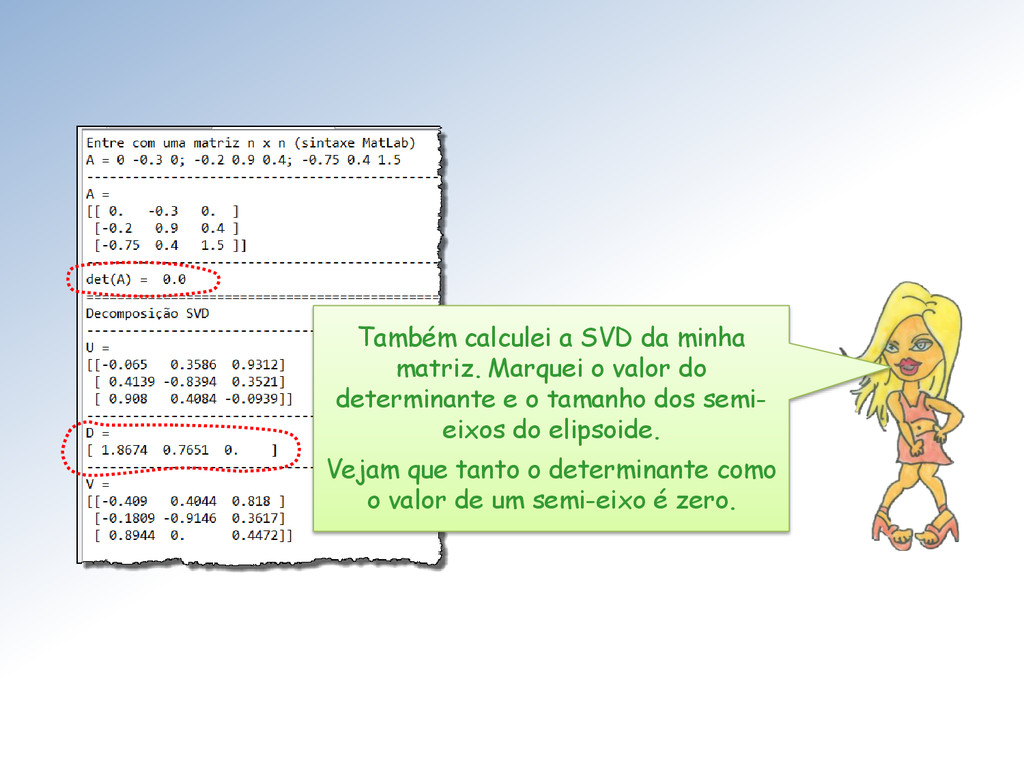
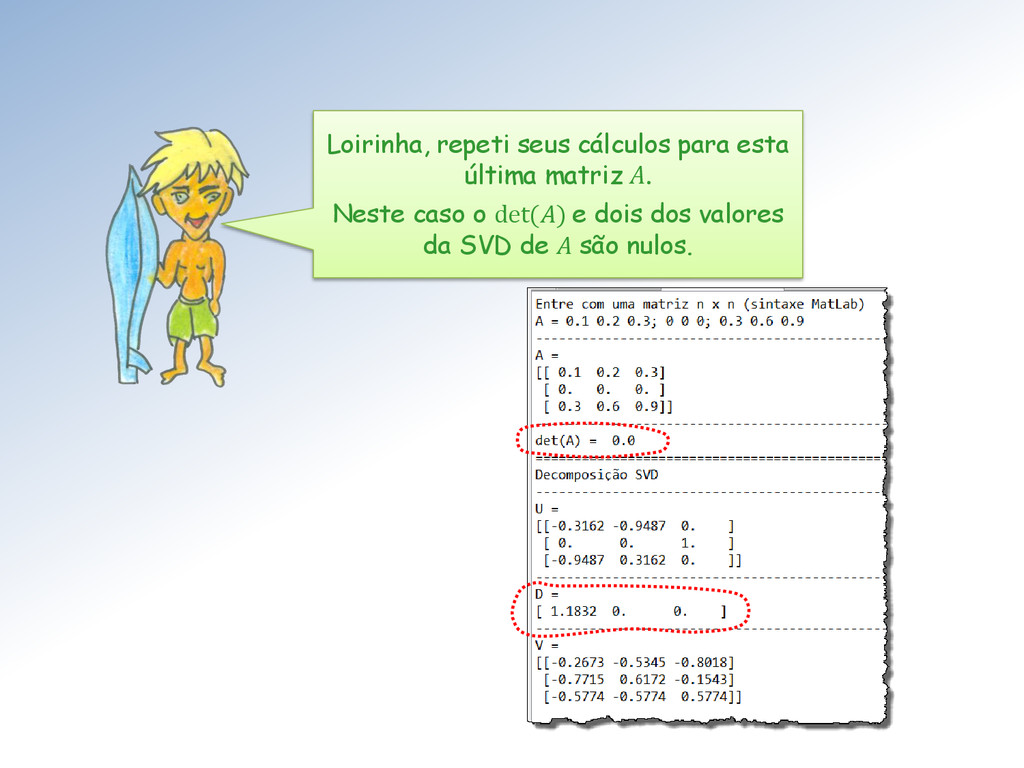
ℳ× . Então existem matrizes ortogonais ∈ ℳ× e ∈ ℳ× tais que = Σ , onde Σ = (1 , 2 , ⋯ , ) ∈ ℳ× , com = { , } e 1 ≥ 2 ≥ ⋯ ≥ ≥ 0. Os ′ são chamados de valores singulares. As colunas de U e V são os vetores singulares da esquerda e direita, respectivamente.
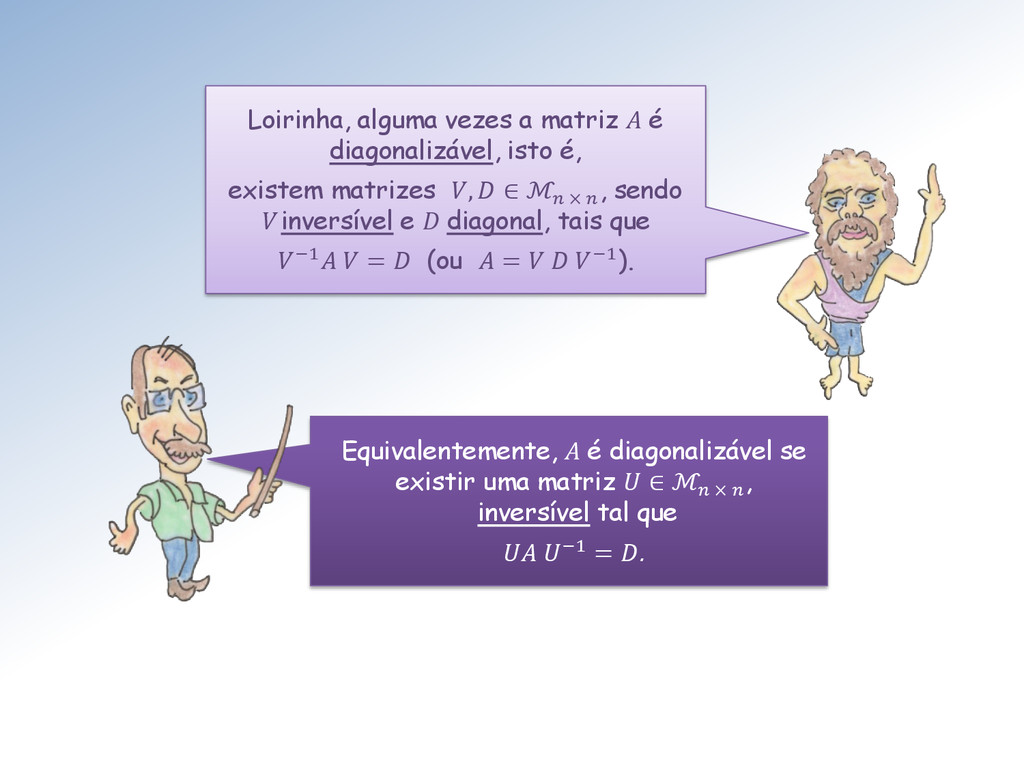
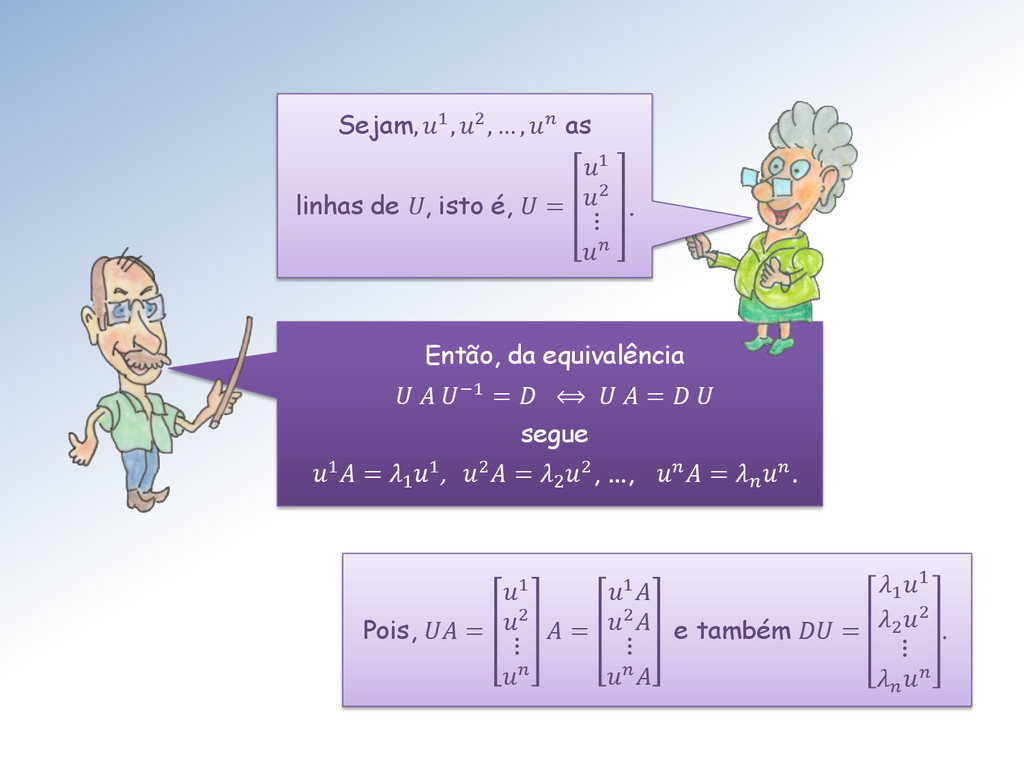
existem matrizes , ∈ ℳ × , sendo V inversível e D diagonal, tais que −1 = (ou = −1). Equivalentemente, A é diagonalizável se existir uma matriz ∈ ℳ × , inversível tal que −1 = .
aos autovetores 1 e 2 . Suponha, por absurdo, que 1 e 2 são LD, isto é 1 = 2 , ≠ 0. Conclua! Logo no início o Mestre afirmou que autovalores distintos garantem que os autovetores correspondentes são linearmente independentes. Prove isto como exercício, Surfista!
independentes) o subespaço gerado por eles possuirá dimensão maior que 1. A dimensão desse subespaço é conhecida como multiplicidade geométrica de . Mestres, existe a possibilidade de alguns dos autovalores 1 , 2 , ⋯ , em serem iguais?
daí que uma matriz ∈ ℳ × possui no máximo n autovalores, contadas as multiplicidades algébricas. Se todas as raízes do polinômio característico forem raízes simples, então A possuirá n autovalores distintos.
maior ou, quando muito, igual à sua multiplicidade geométrica. No caso da multiplicidade algébrica de um autovalor ser maior que sua multiplicidade geométrica, ele é dito defectivo.
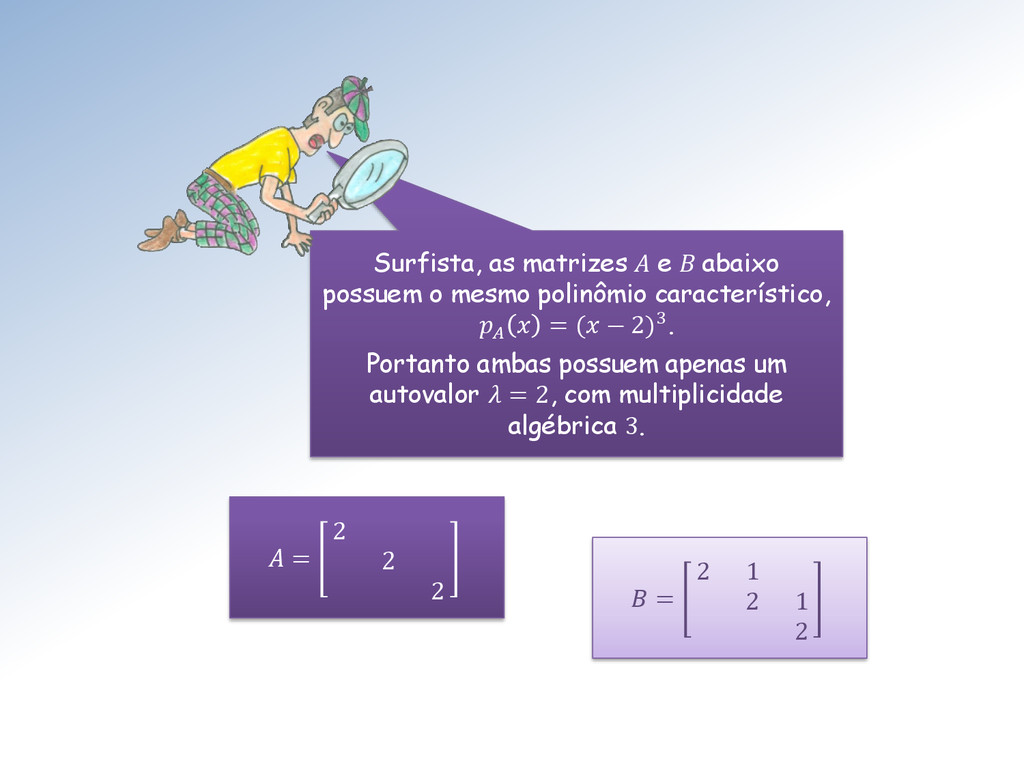
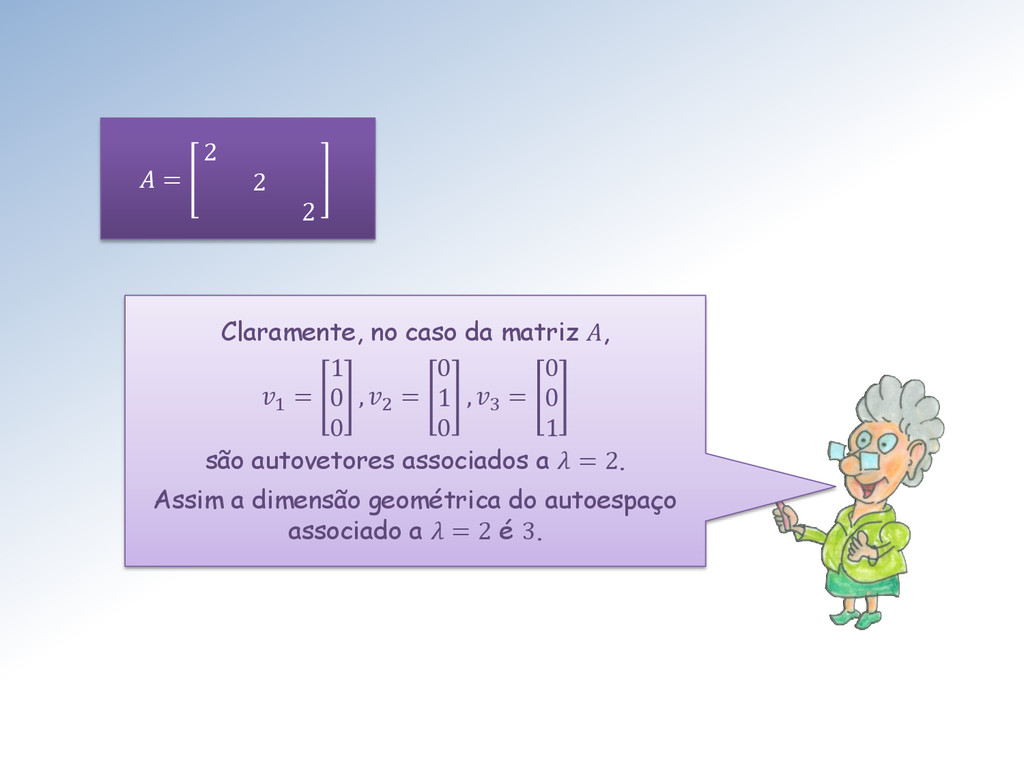
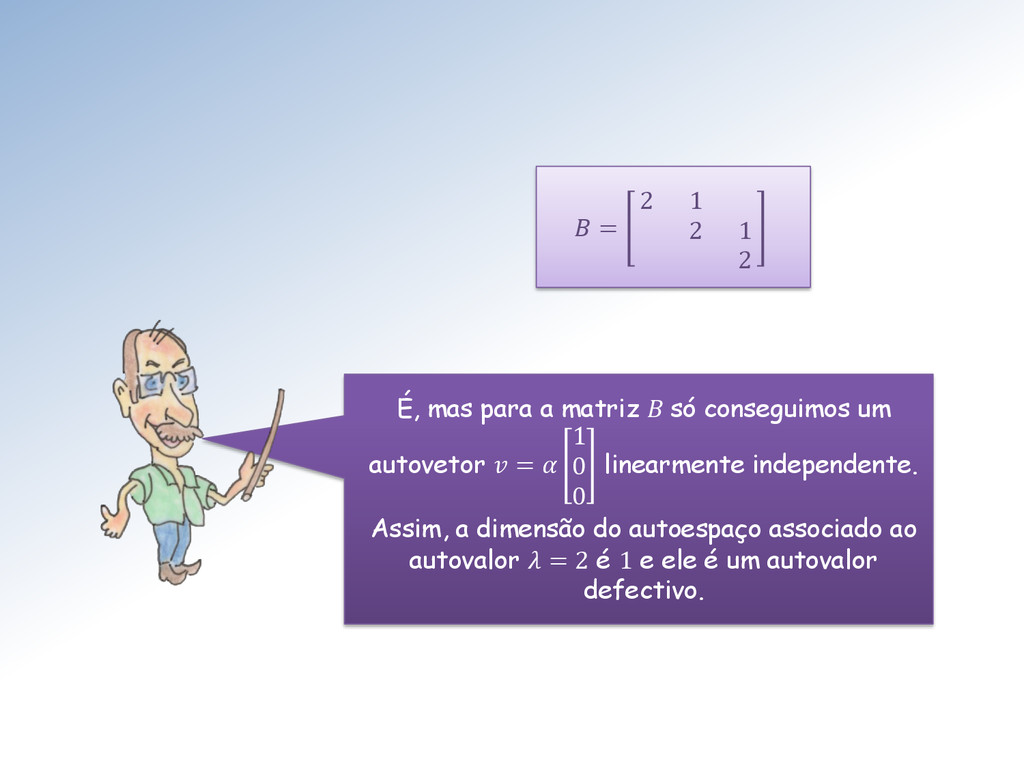
matriz B só conseguimos um autovetor = 1 0 0 linearmente independente. Assim, a dimensão do autoespaço associado ao autovalor = 2 é 1 e ele é um autovalor defectivo.
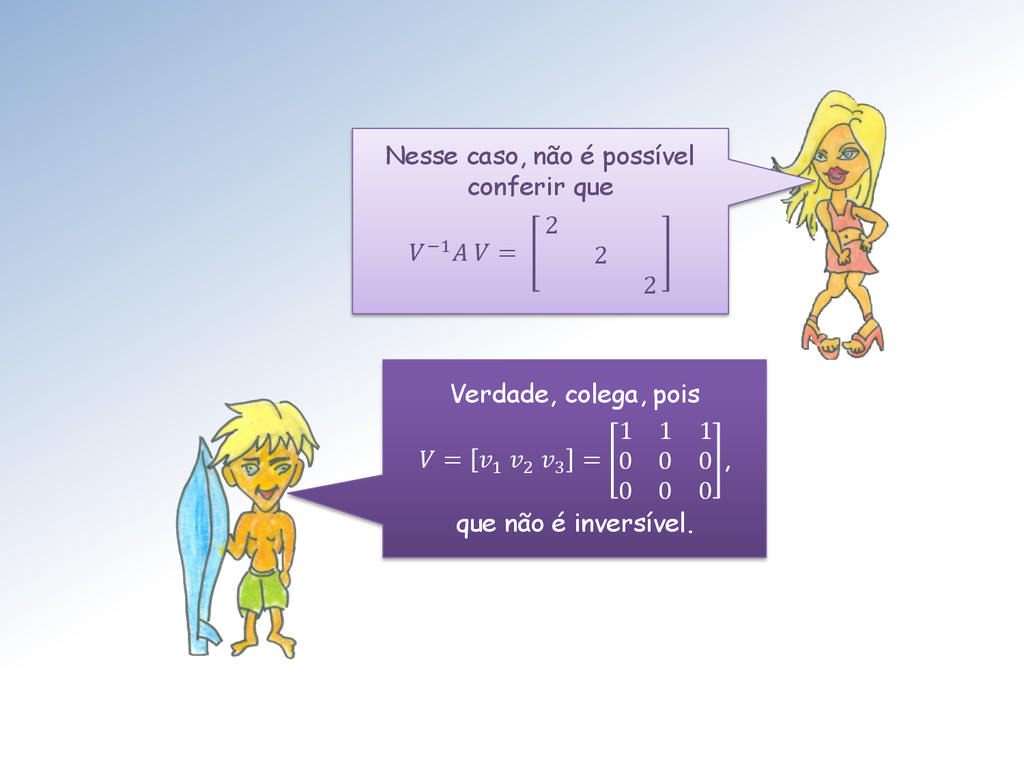
somente se, ela é não defectiva. Em outras palavras: existem matrizes V e , com V inversível e diagonal, tais que −1 = quando, e apenas quando, A é não defectiva.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}