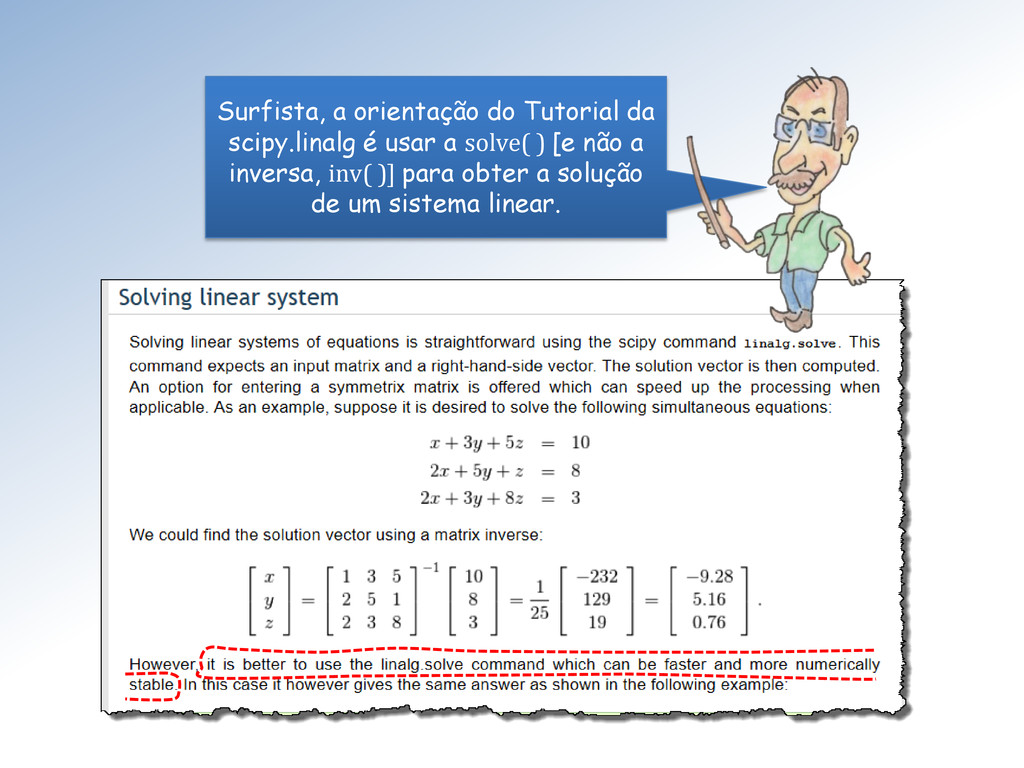
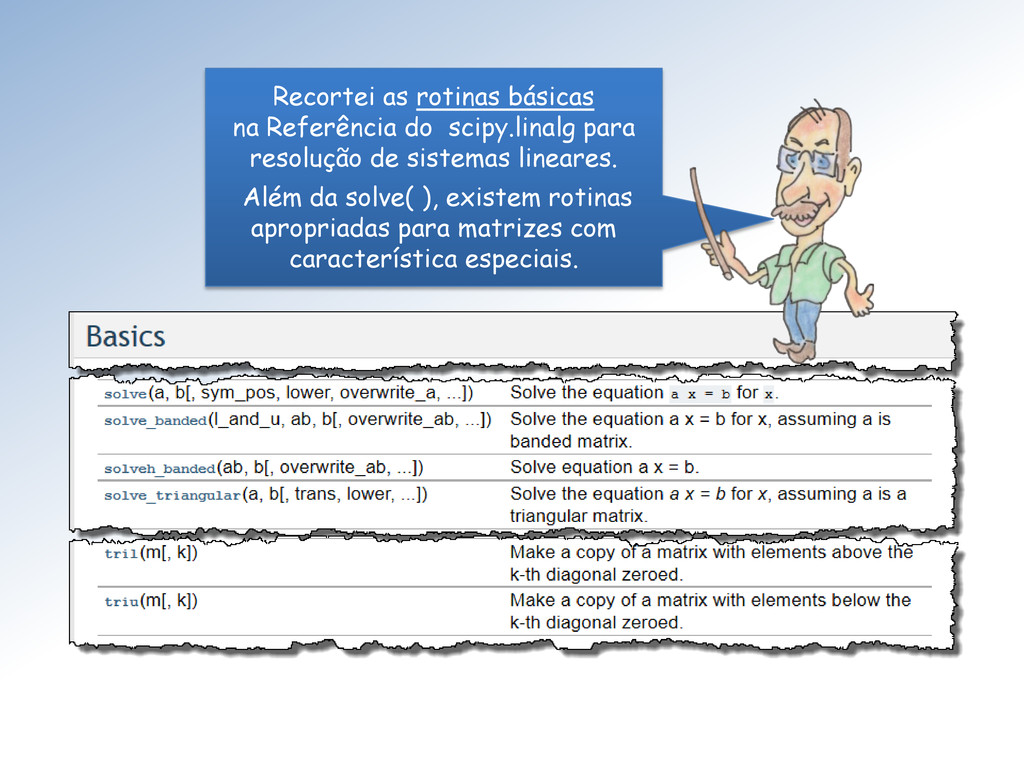
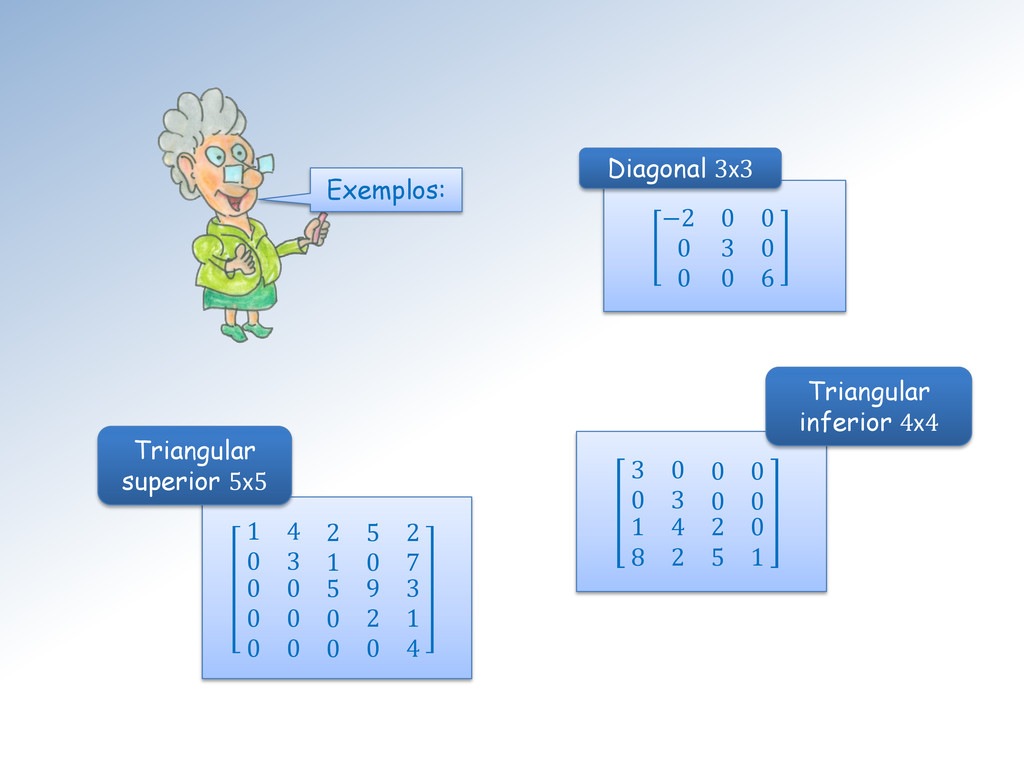
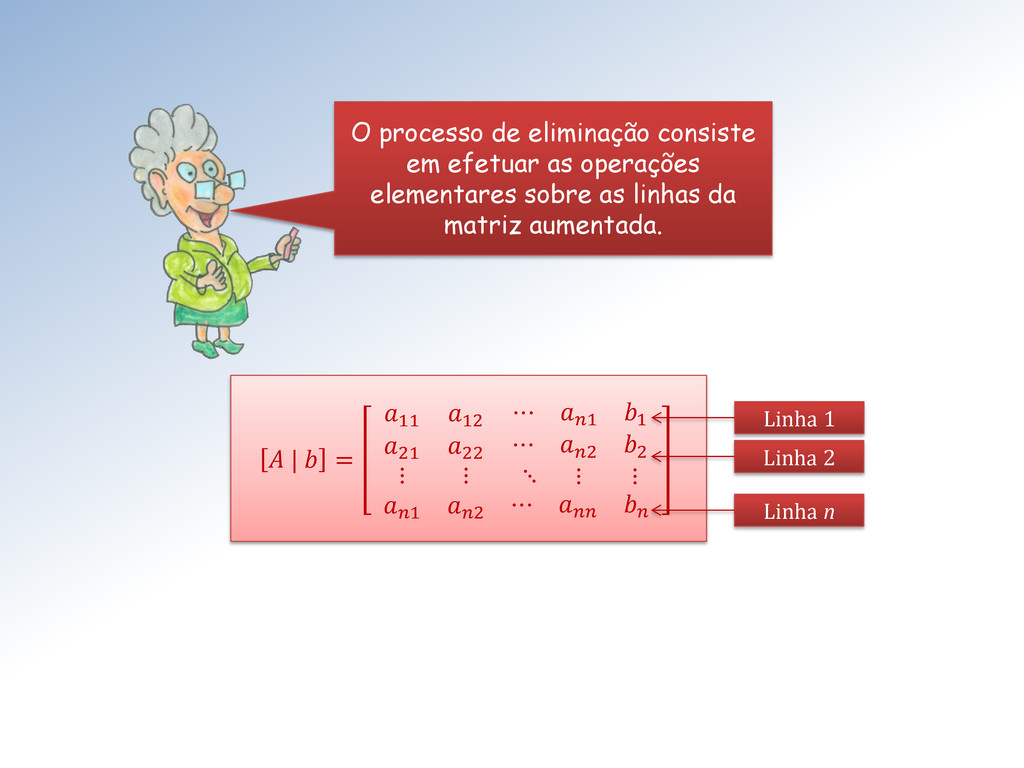
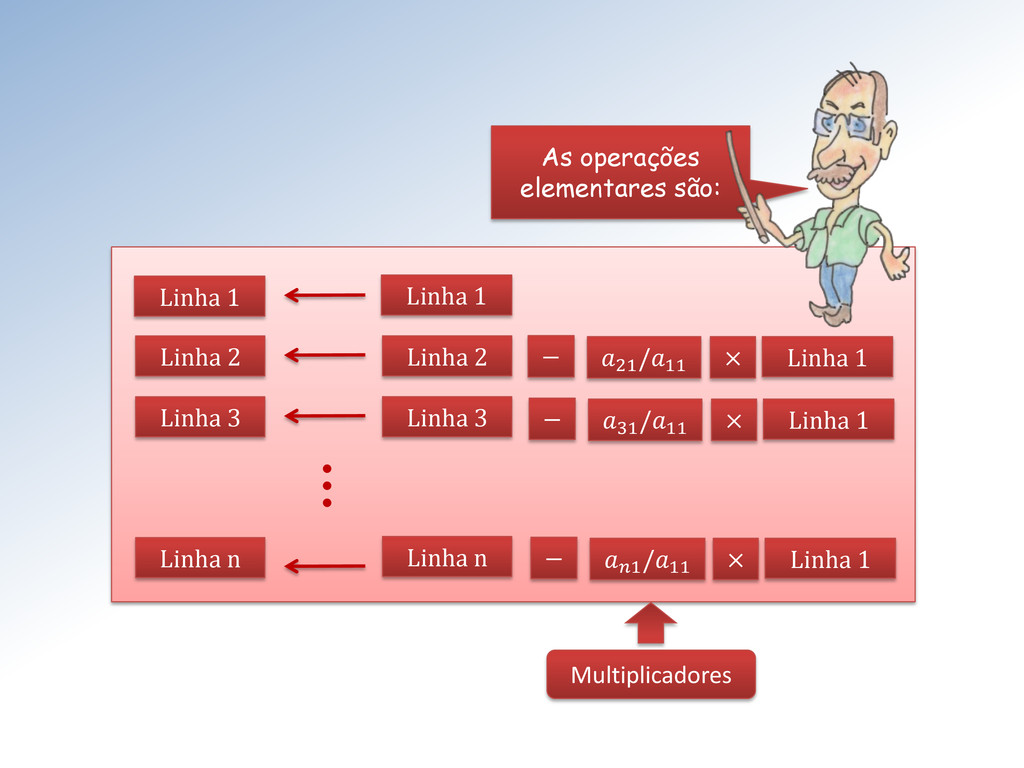
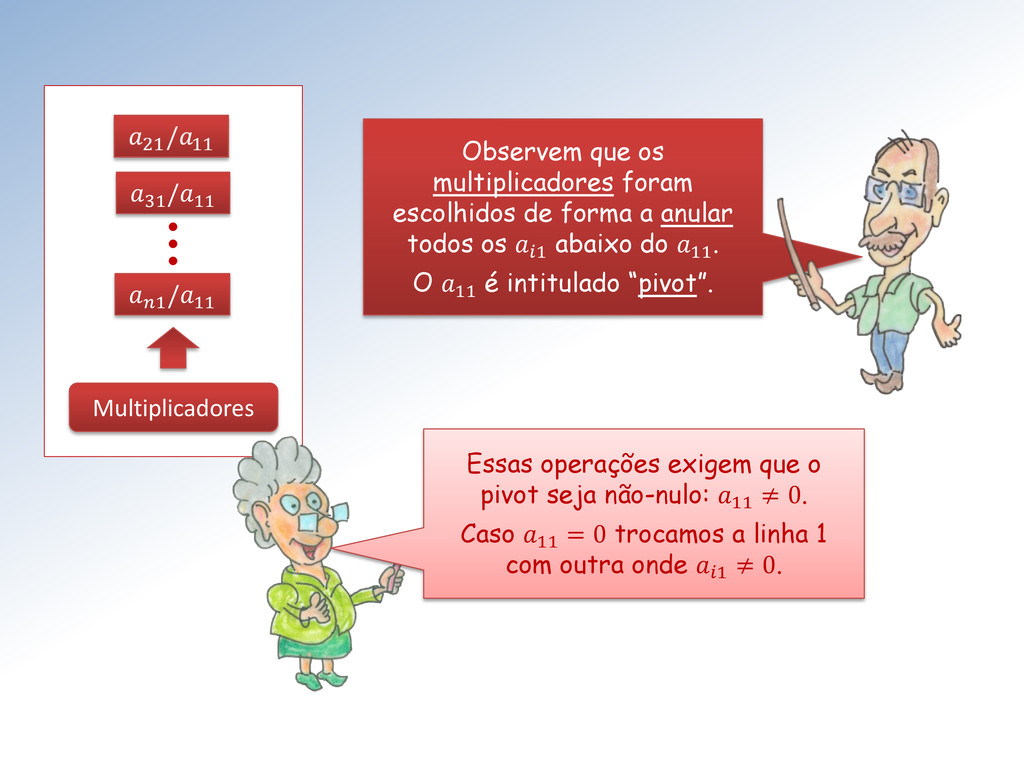
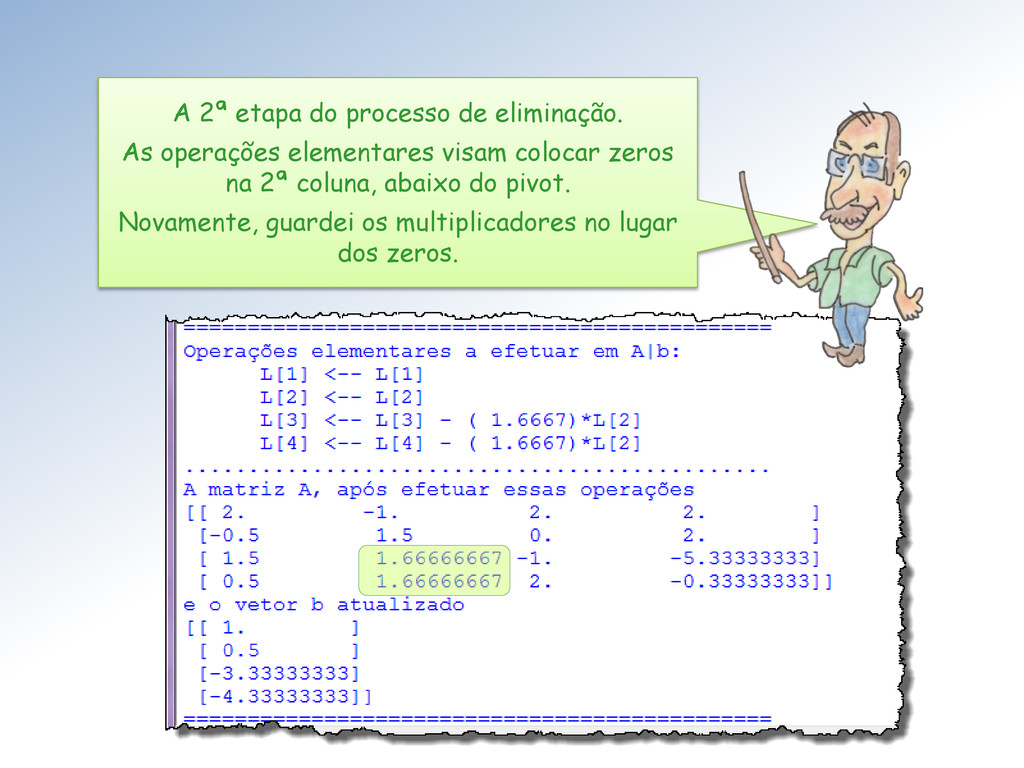
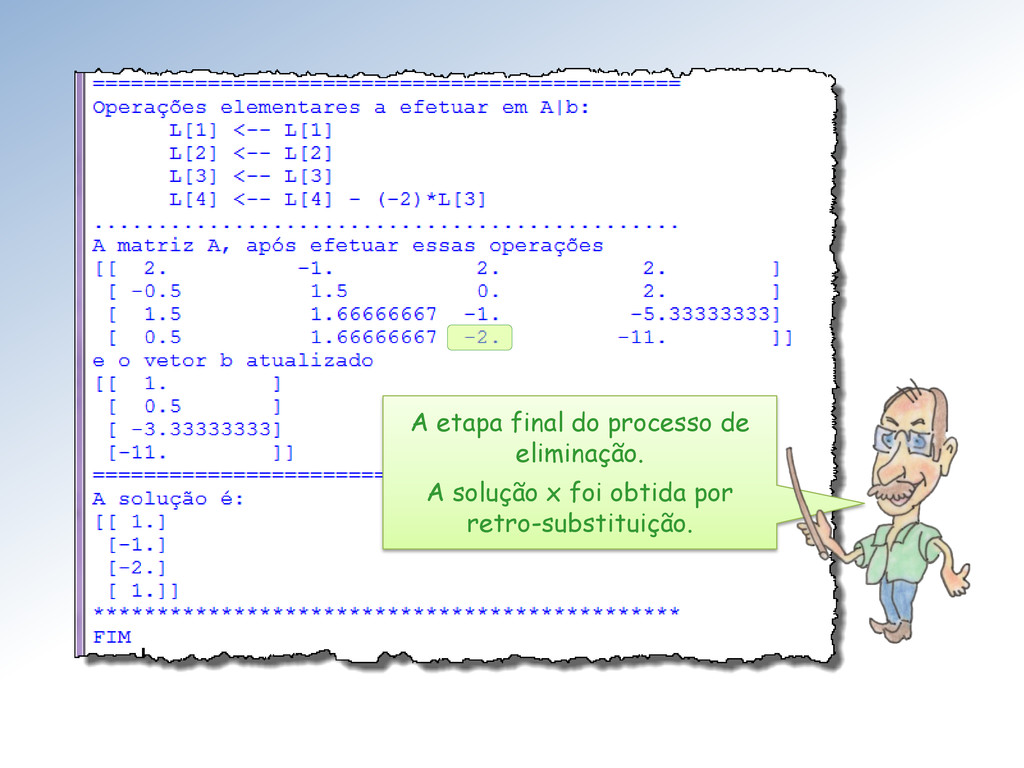
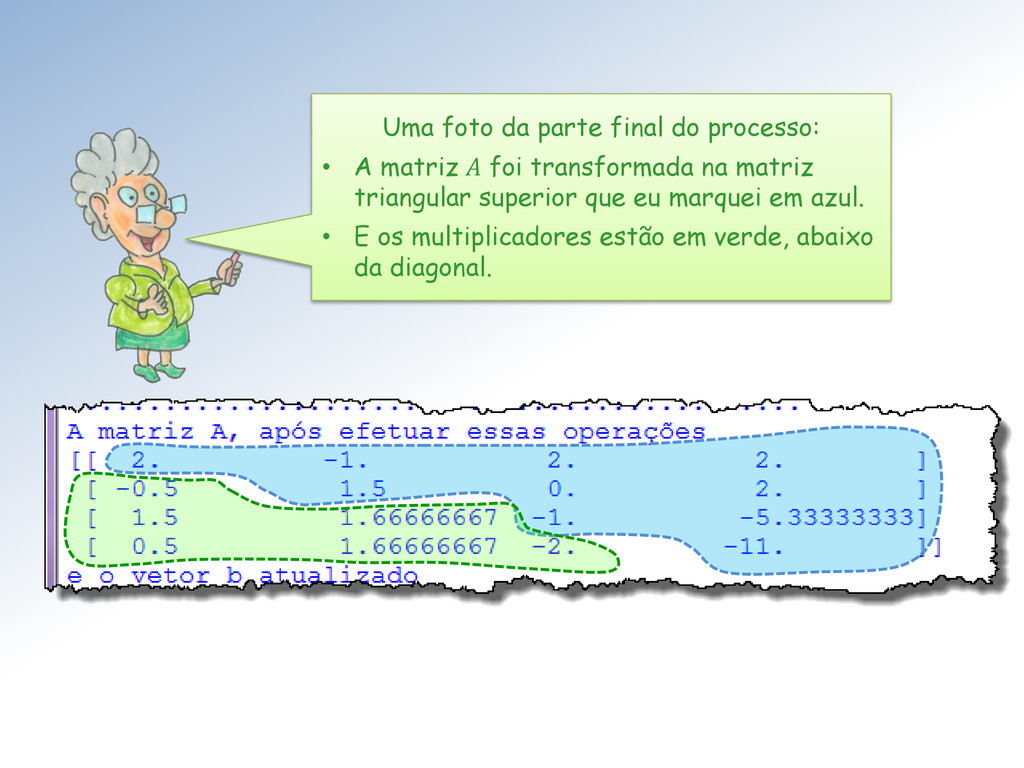
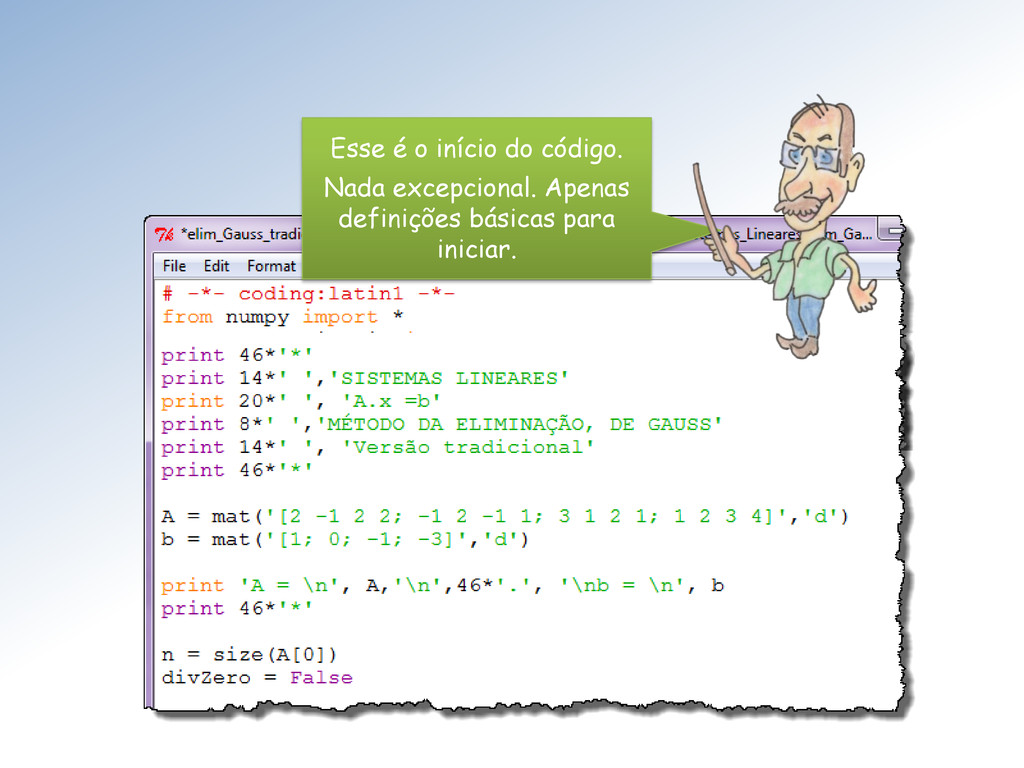
Recordamos os tipos de matrizes particulares usuais (simétricas, defin. posit., e de banda), apresentamos a utilização das rotinas básicas da sipy.linalg e suas fatorações LU e de Cholesky. Depois detalhamos a eliminação de Gauss e fatoração LU sem pivotamento e a necessidade do pivotamento para evitar a propagação do erro presente na aritmética finita da IEEE 754.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Aliás existe toda uma fauna de matrizes = [ ]](https://files.speakerdeck.com/presentations/80add4a002ff013135f97264a56abaca/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
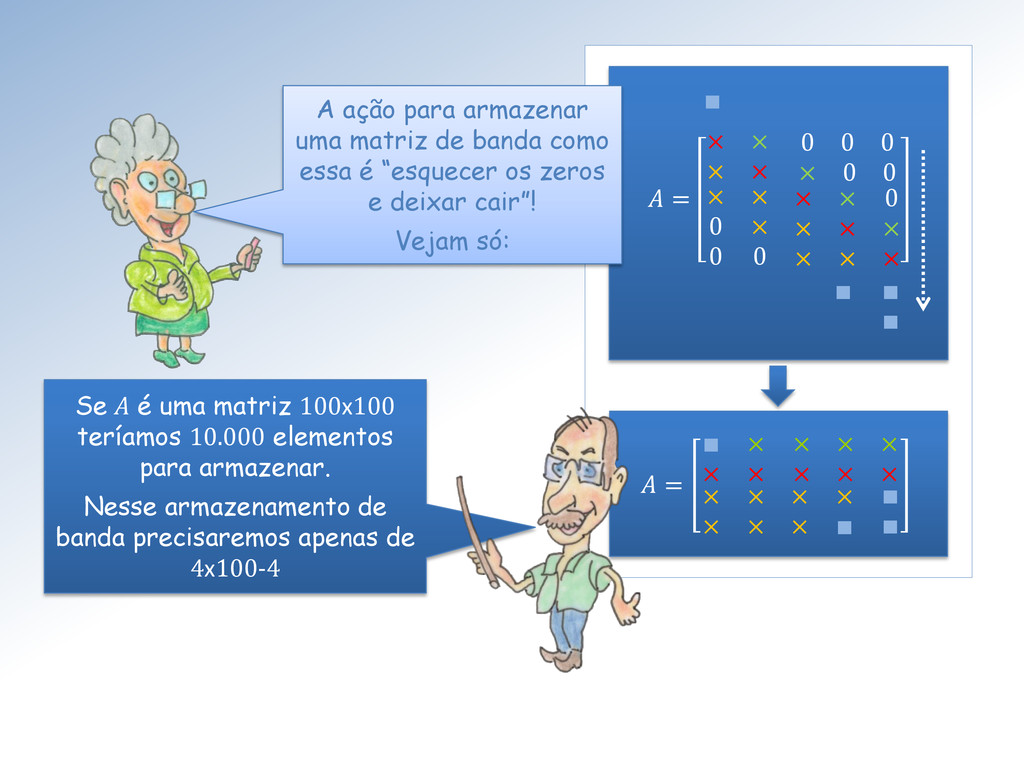
![Uma matriz = [ ] possui banda inferior k quando](https://files.speakerdeck.com/presentations/80add4a002ff013135f97264a56abaca/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Um zoológico bem complexo: A adjunta de = [ ],](https://files.speakerdeck.com/presentations/80add4a002ff013135f97264a56abaca/slide_30.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}