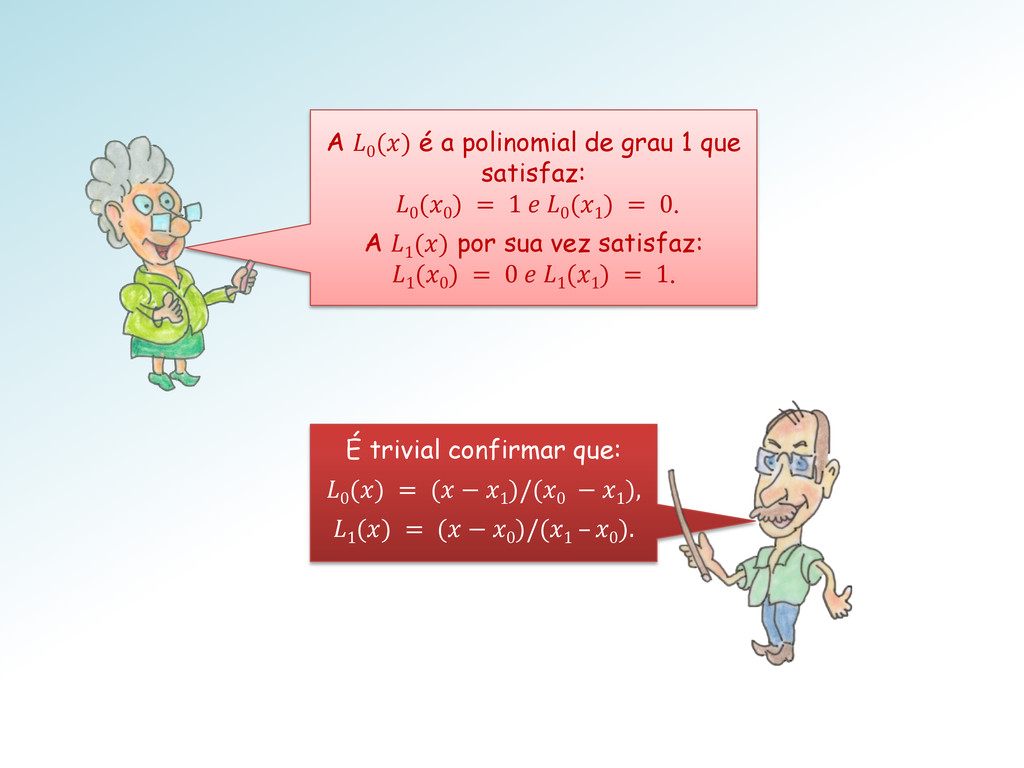
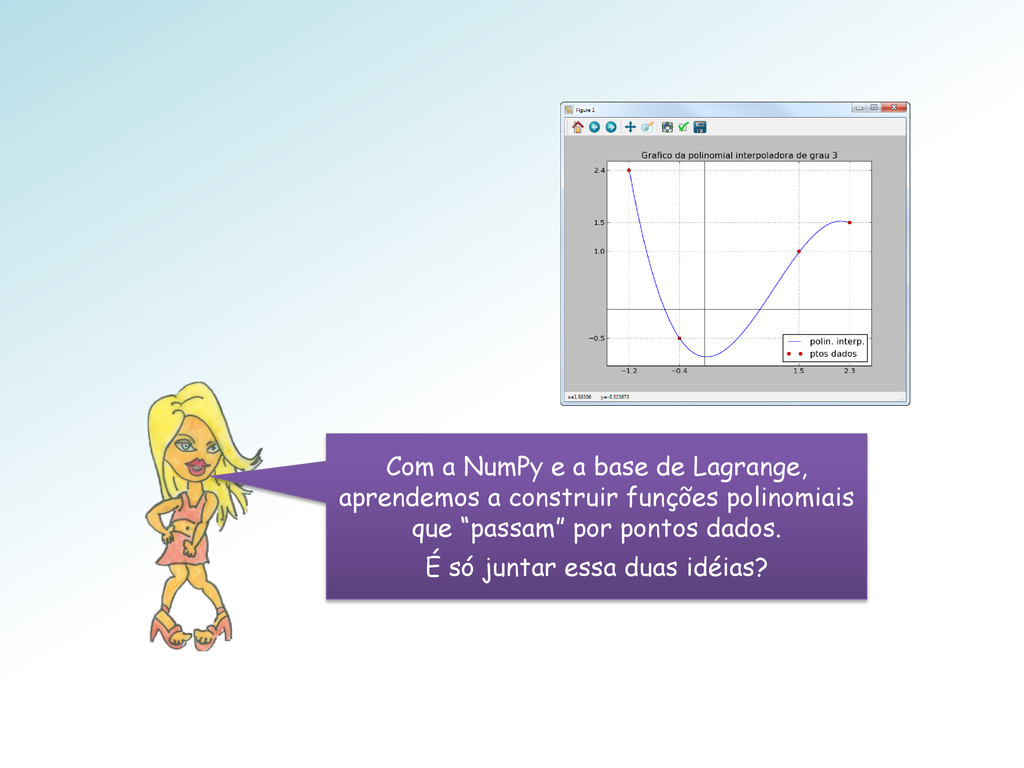
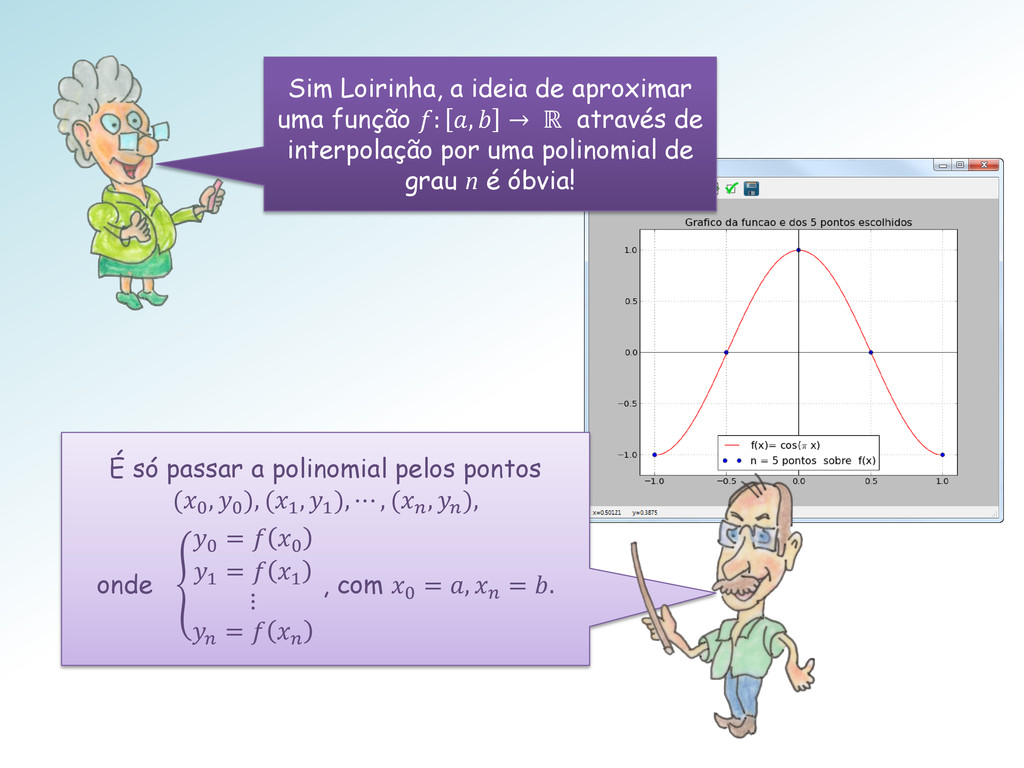
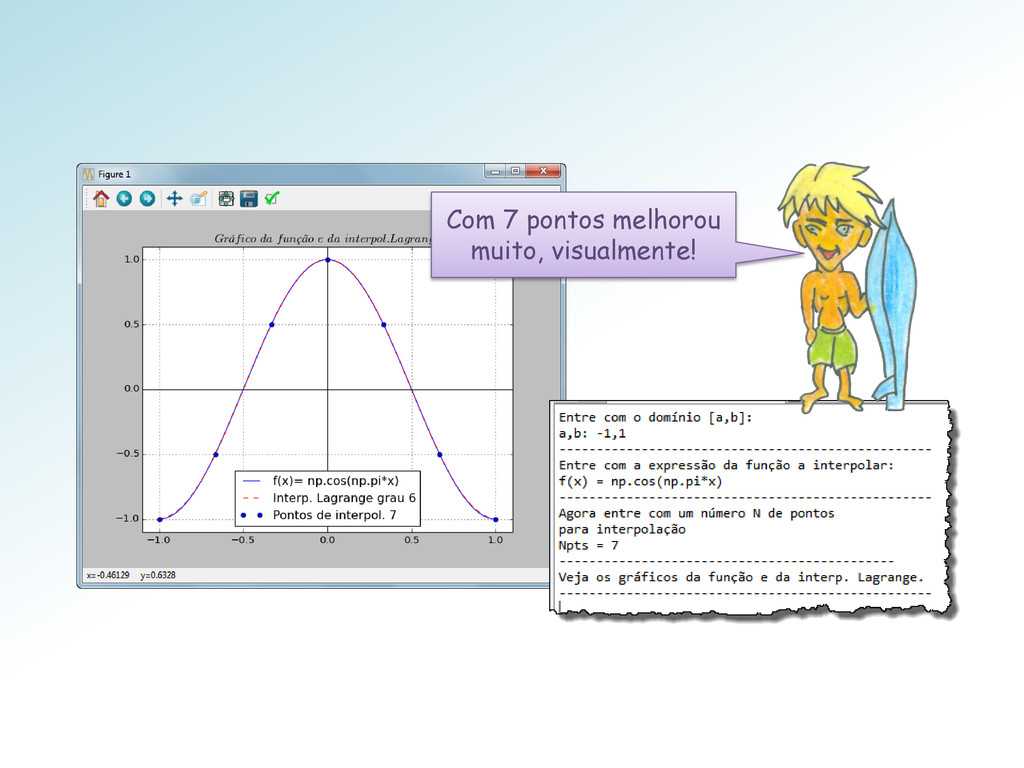
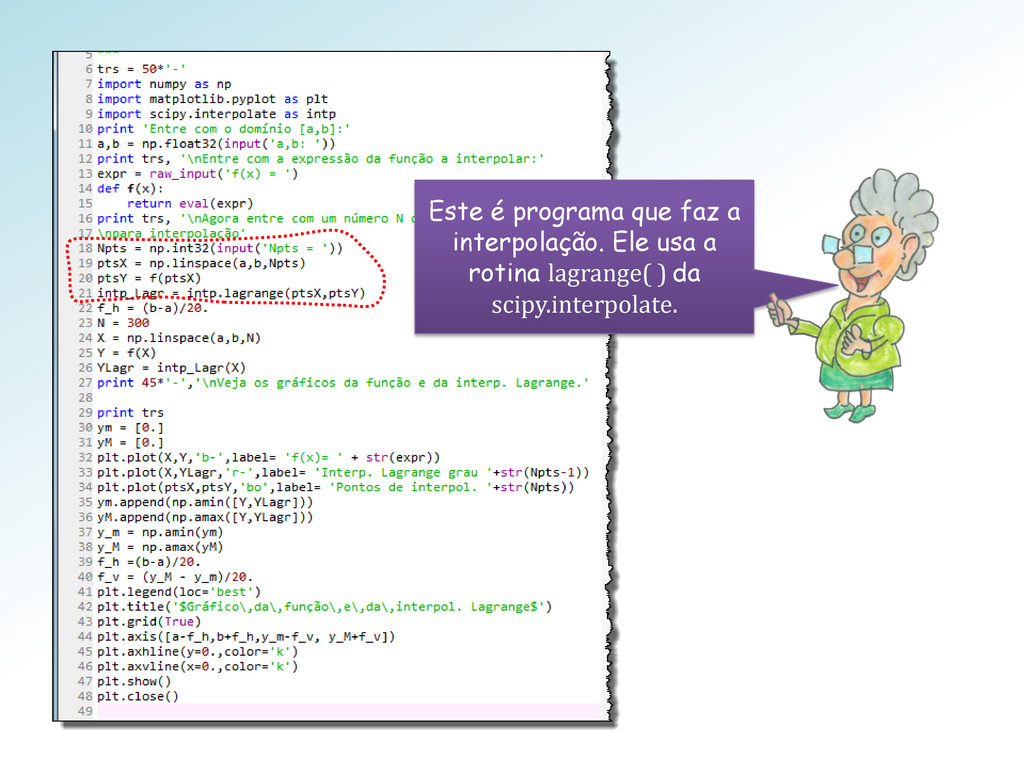
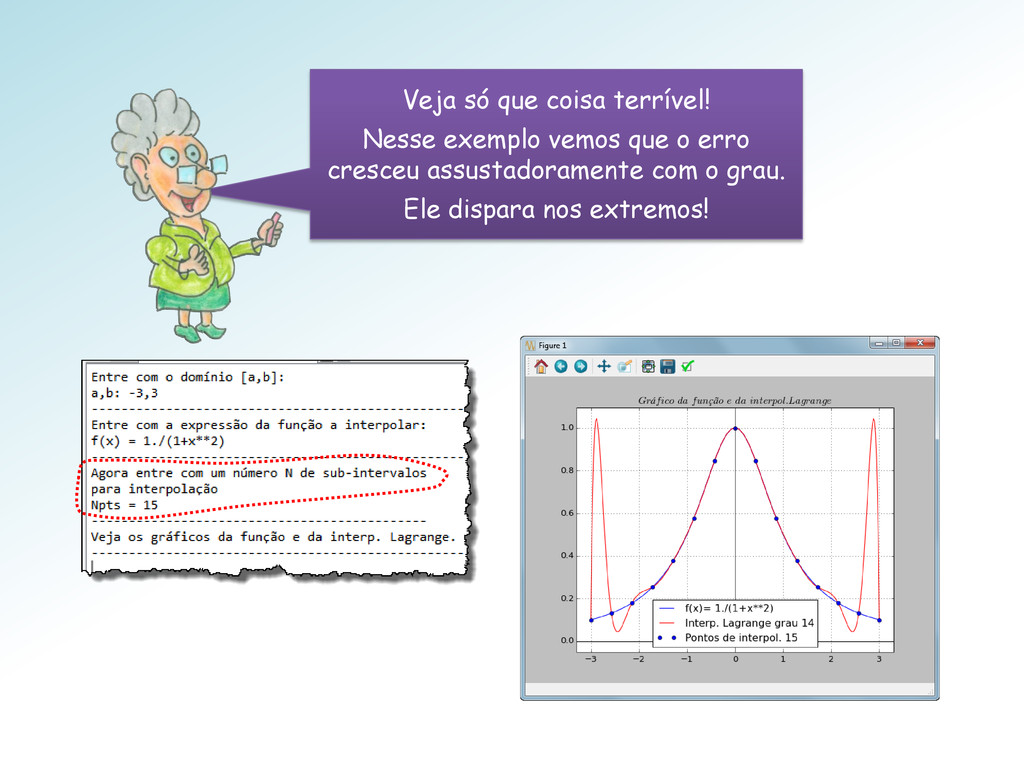
Começamos com a base canônica de Lagrange para o espaço das polinomiais de grau menor ou igual a N. Em seguida viajamos ao século XVI para as tábuas de funções trigonométricas e de logaritmos. Depois analisamos o conceito de supremo e definimos aproximação uniforme para o espaço das funções limitadas. Depois de do teorema de Weirstrass, passamos a usar o scipy.interpolate. Olhamos então para DDFs e para o algoritmo de Krogh. Seguindo Berrut e Trefethen recuperamos o prestígio da interpolação de Lagrange com a fórmula baricêntrica. Encerramos olhando para o fenômeno de Runge.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
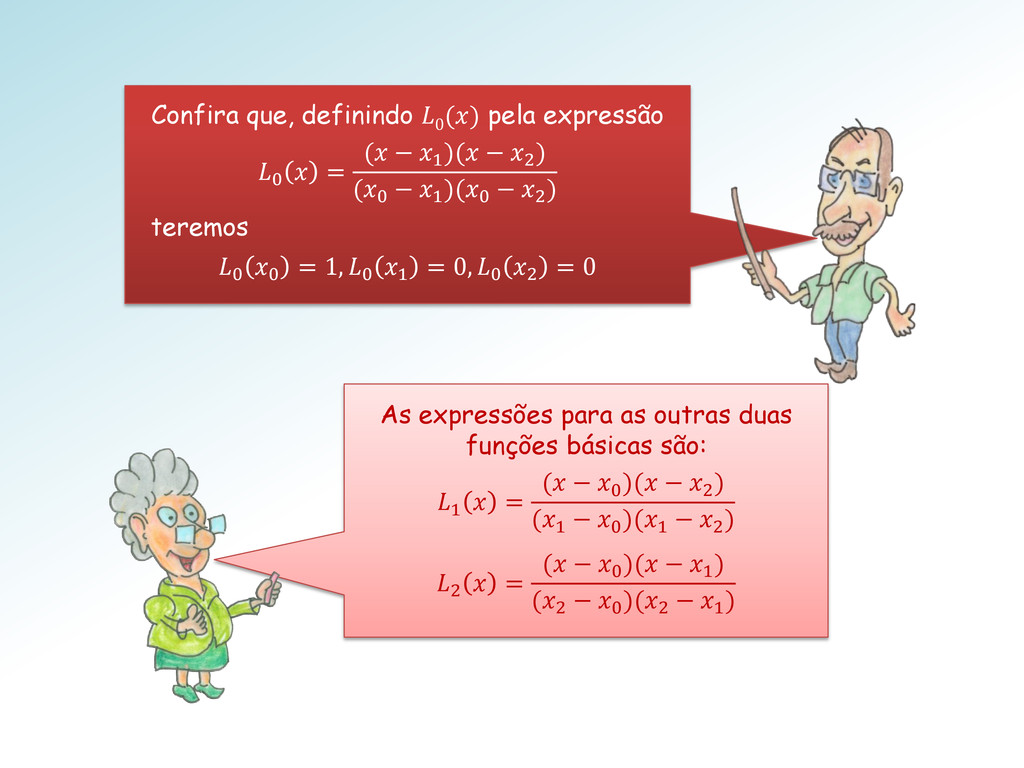
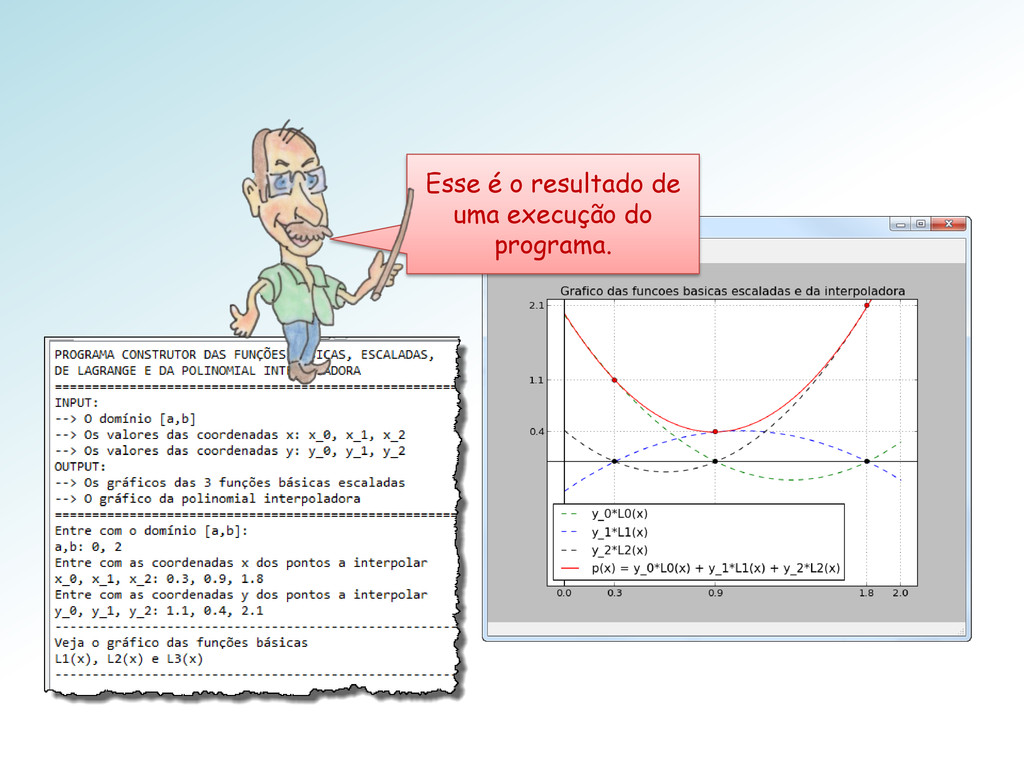
![Em ℙ2[, ], que tem dimensão três, as funções básicas](https://files.speakerdeck.com/presentations/0bf9bc503f5c013186956ace02da7969/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Assim ℙ[a, b] possui dimensão infinita (enumerável) e não se](https://files.speakerdeck.com/presentations/0bf9bc503f5c013186956ace02da7969/slide_52.jpg){kind=link}
{kind=link}
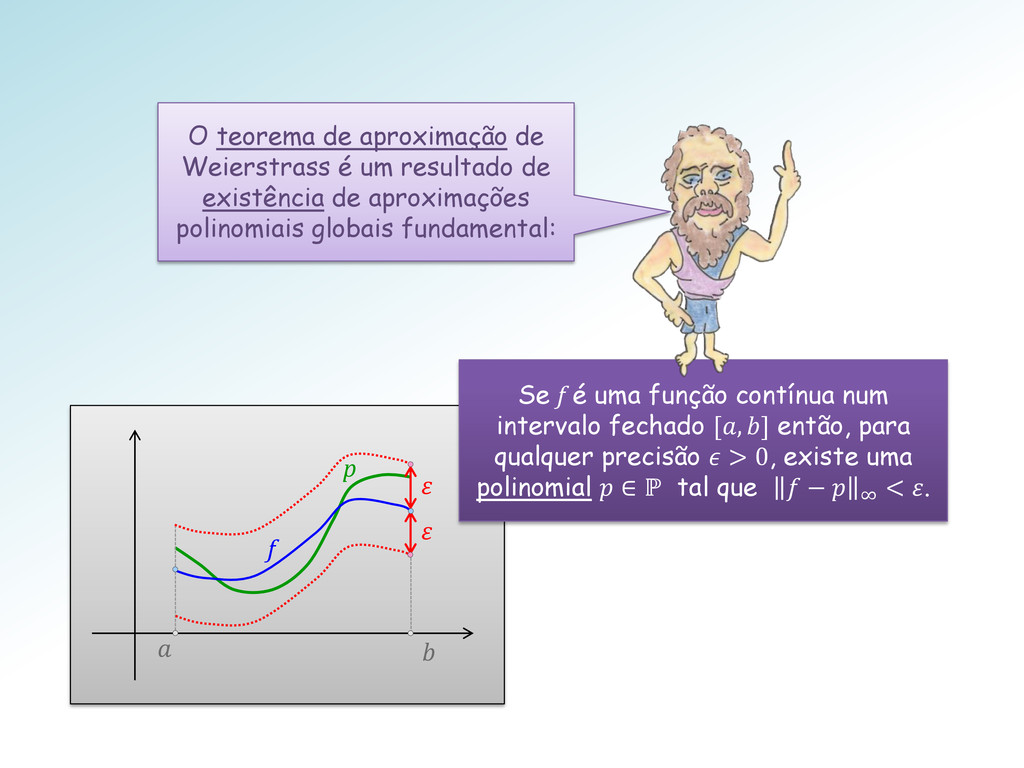
![Esse teorema de Weierstrass informa que ℙ[, ] é denso](https://files.speakerdeck.com/presentations/0bf9bc503f5c013186956ace02da7969/slide_54.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}