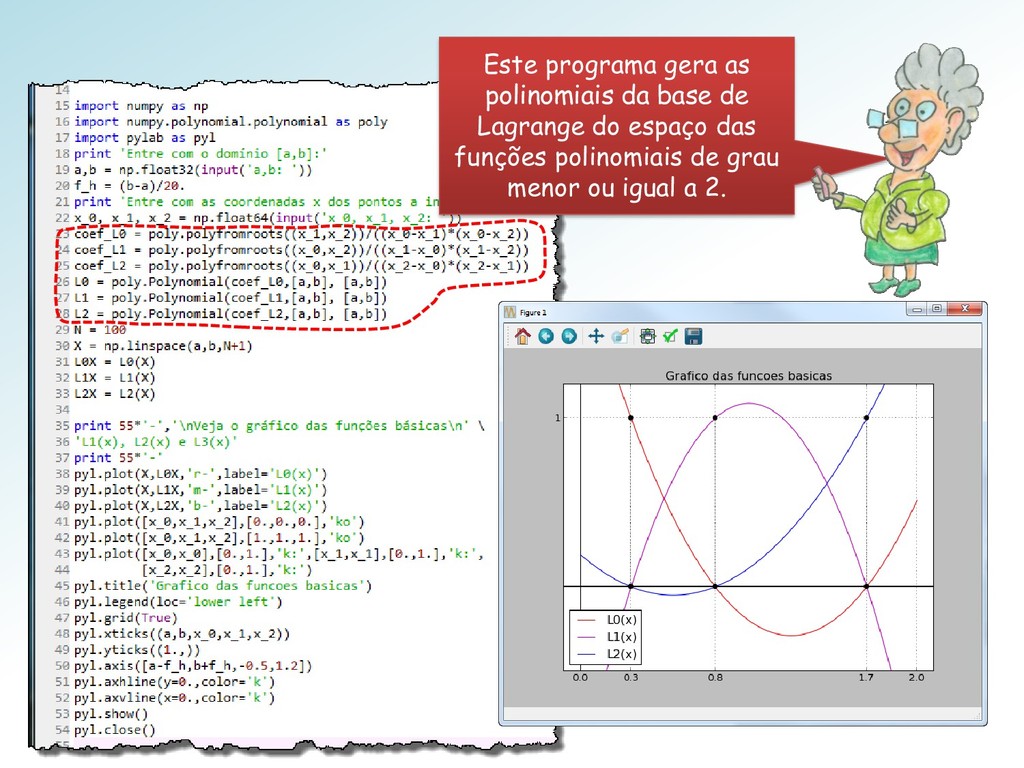
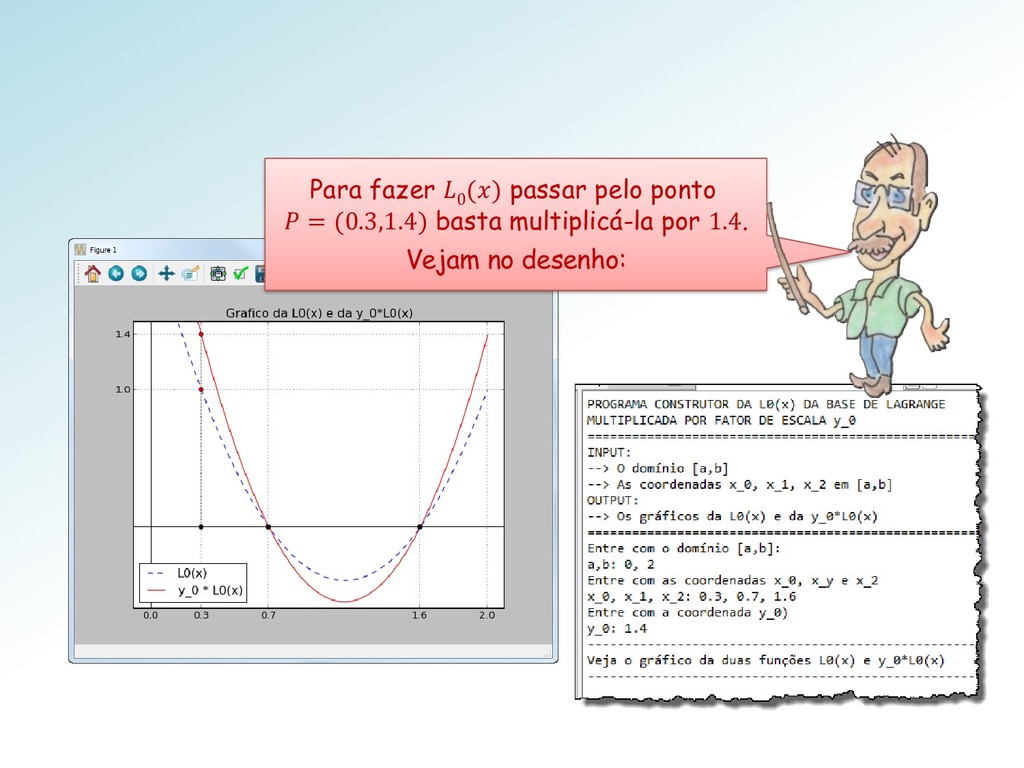
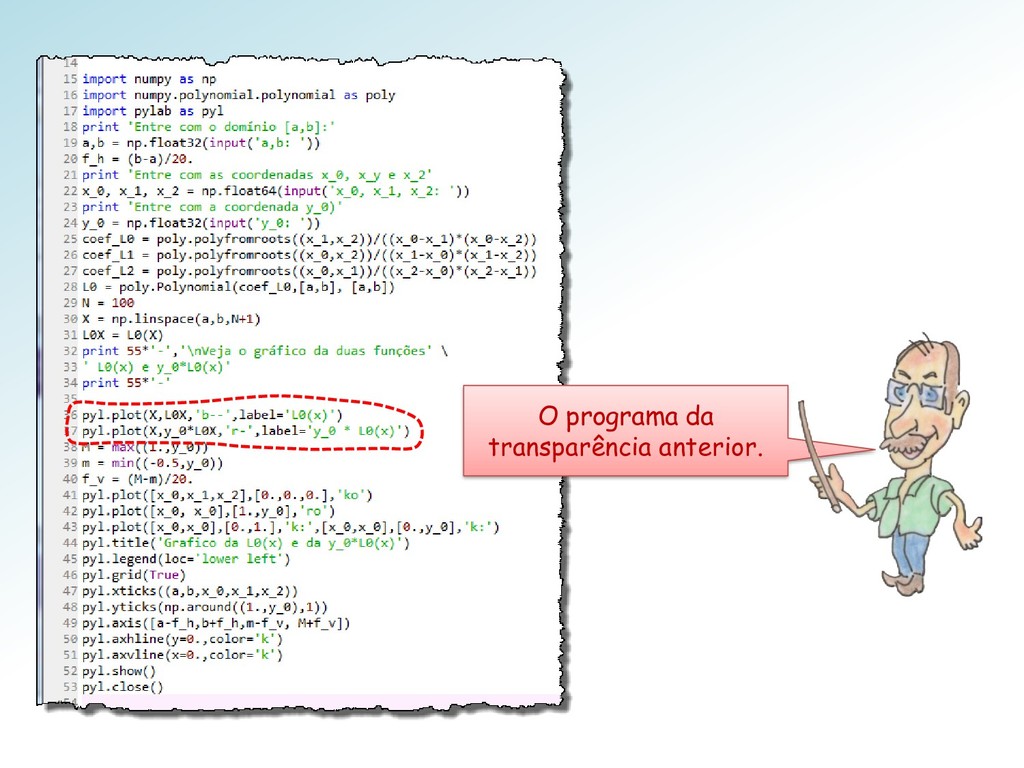
de grau menor ou igual a 2, é constituída pelas polinomiais: 0 () = 0 = 1, 1 () = 1 = , 2 () = 2 . A ideia é a mesma. Para a polinomial = 2.1 + 0.7 + 1.5 2 temos = 2.1 0 + 0.7 1 + 1.5 2
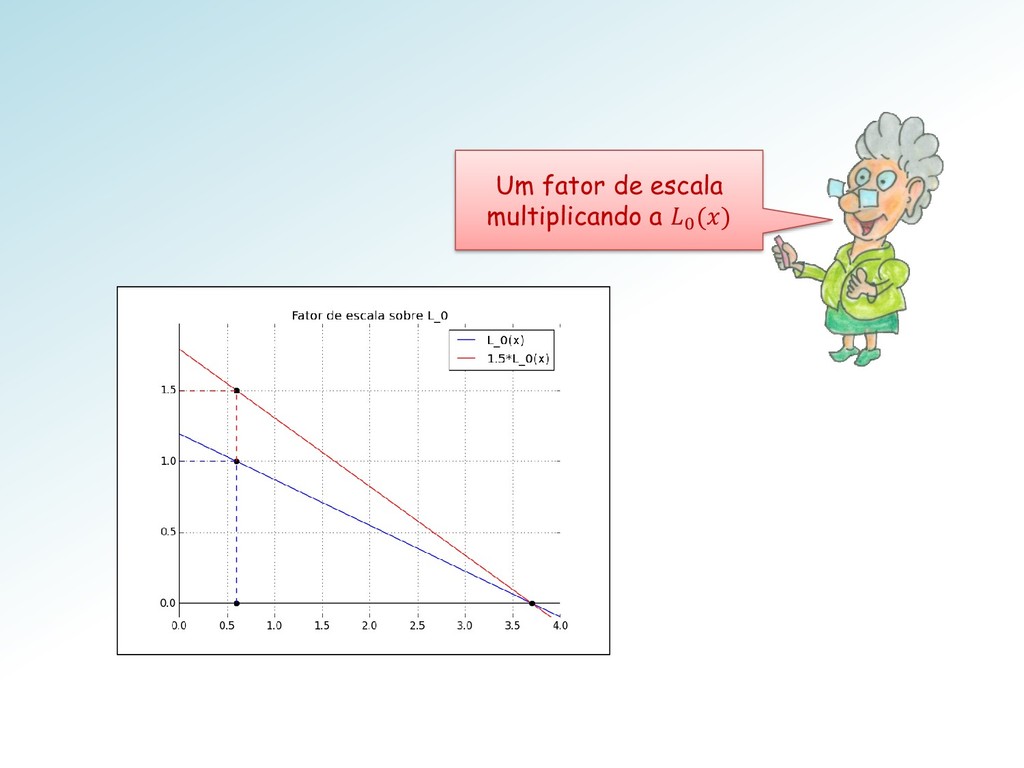
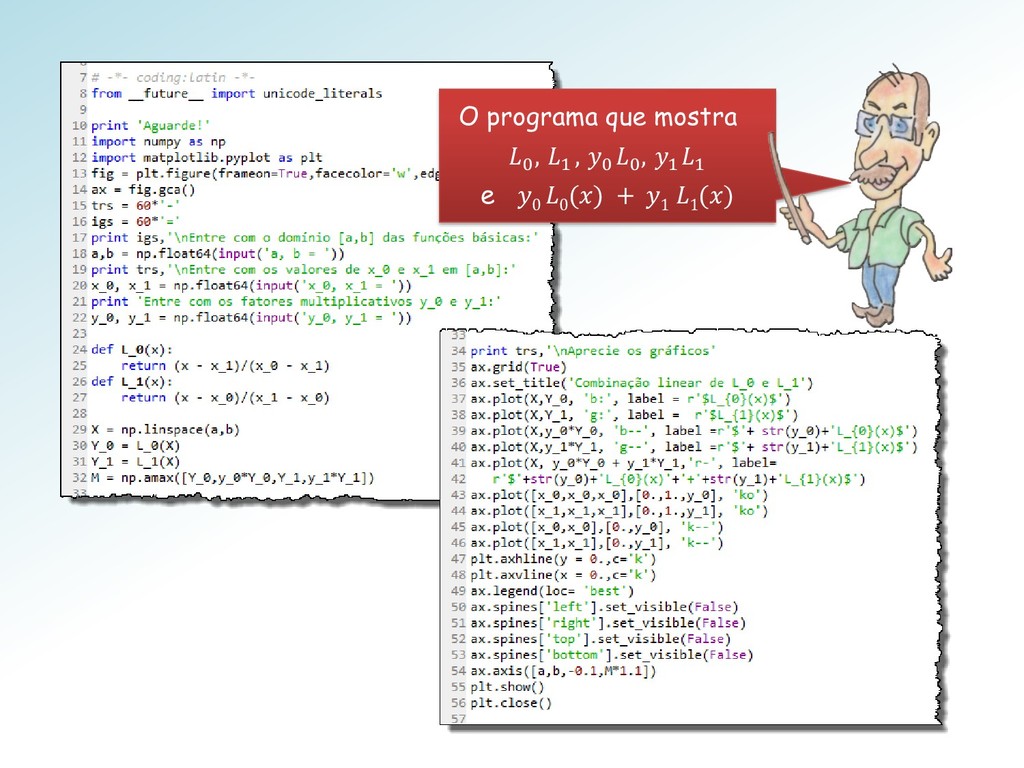
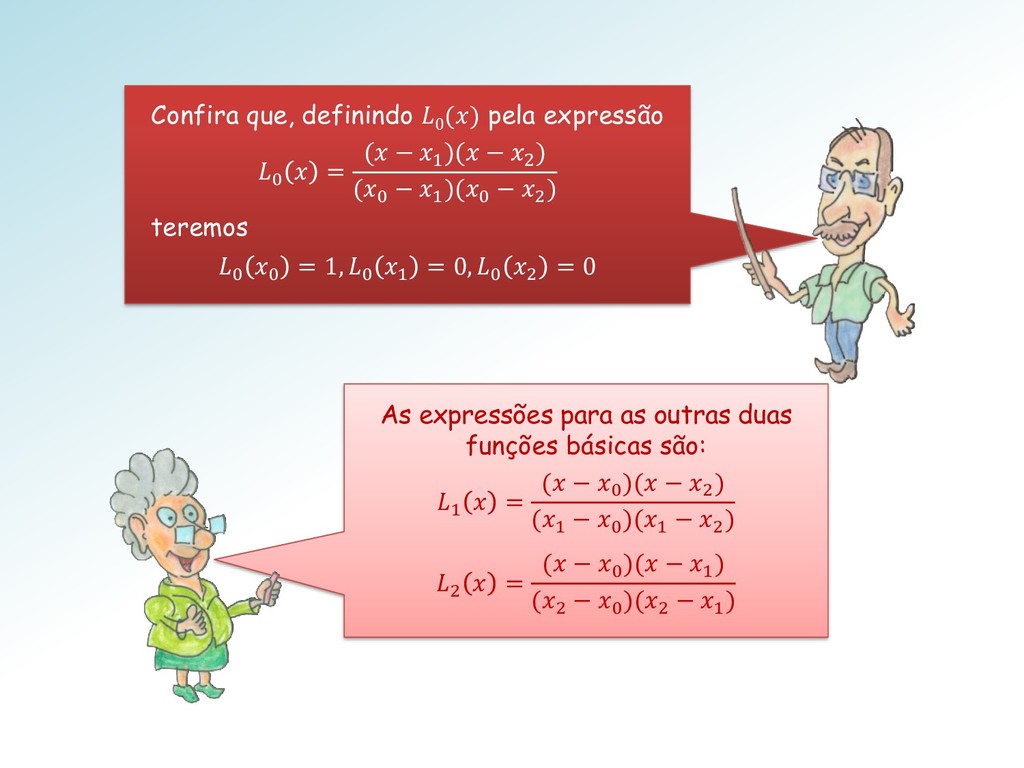
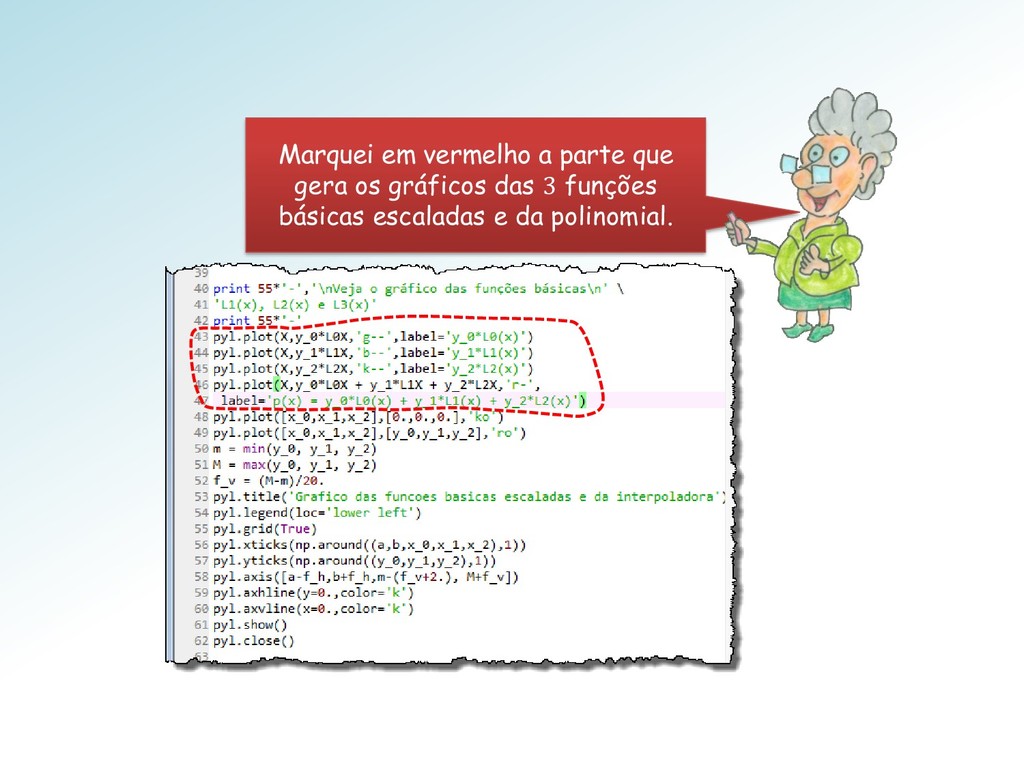
função escalada 1 1 () passará pelo ponto ( 1 , 1 ); • Multiplicando 2 () por um número 2 , a função escalada 2 2 () passará pelo ponto ( 2 , 2 ). A mesma ideia se aplica às outras duas funções básicas:
descreve um método para calcular produtos em termos de somas. Nasciam os logaritmos. O livro apresenta ainda 90 páginas com tabelas para utilização do seu método
bons Professores! Briggs convenceu Johann Kepler sobre as vantagens da invenção de Napier. Kepler usou logaritmos para calcular as posições de Marte, o que conduziu-o a descobrir as leis do movimento planetário. A reputação de Kepler foi fundamental na disseminação do uso de logaritmos em toda a Europa. Isaac Newton usou as leis de Kepler para descobrir a lei da gravidade.
rápida, num tempo em que não haviam computadores, nem máquinas de calcular. Mestres, afinal de contas, para que eram utilizadas as tábuas de logaritmo?
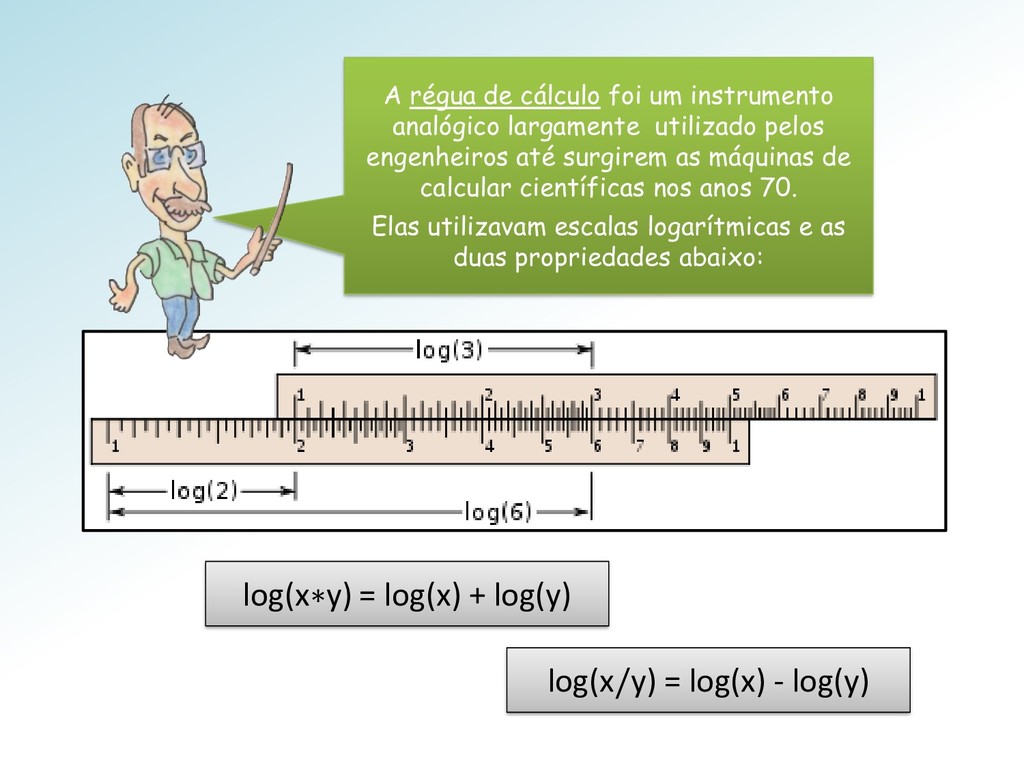
A régua de cálculo foi um instrumento analógico largamente utilizado pelos engenheiros até surgirem as máquinas de calcular científicas nos anos 70. Elas utilizavam escalas logarítmicas e as duas propriedades abaixo:
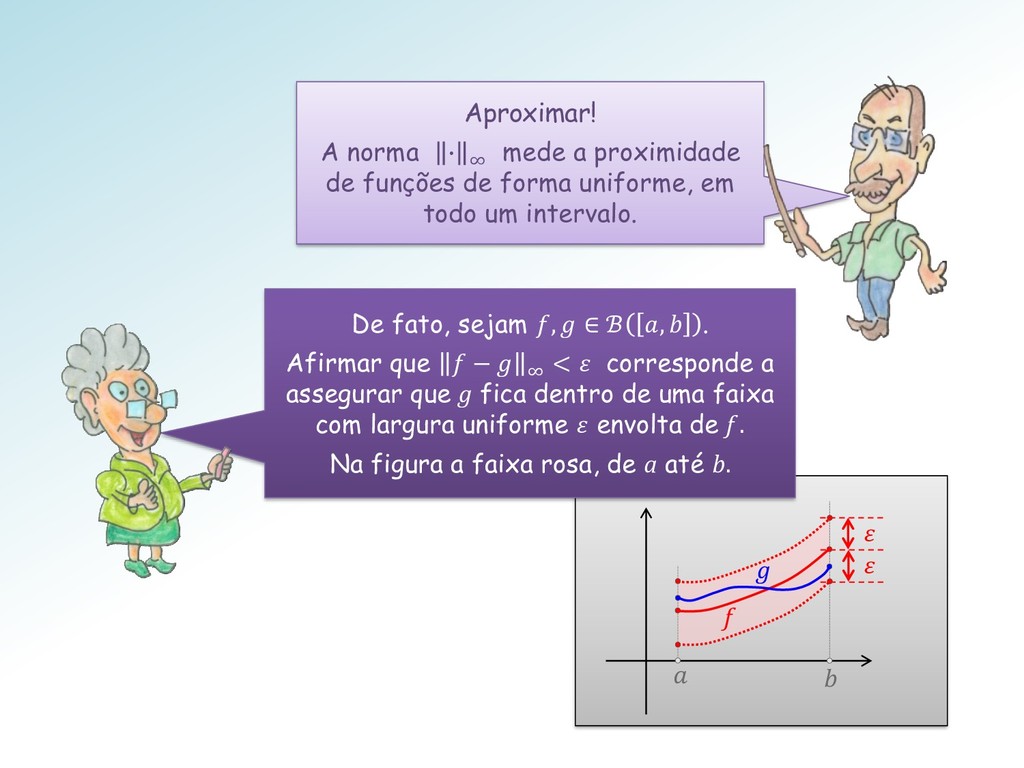
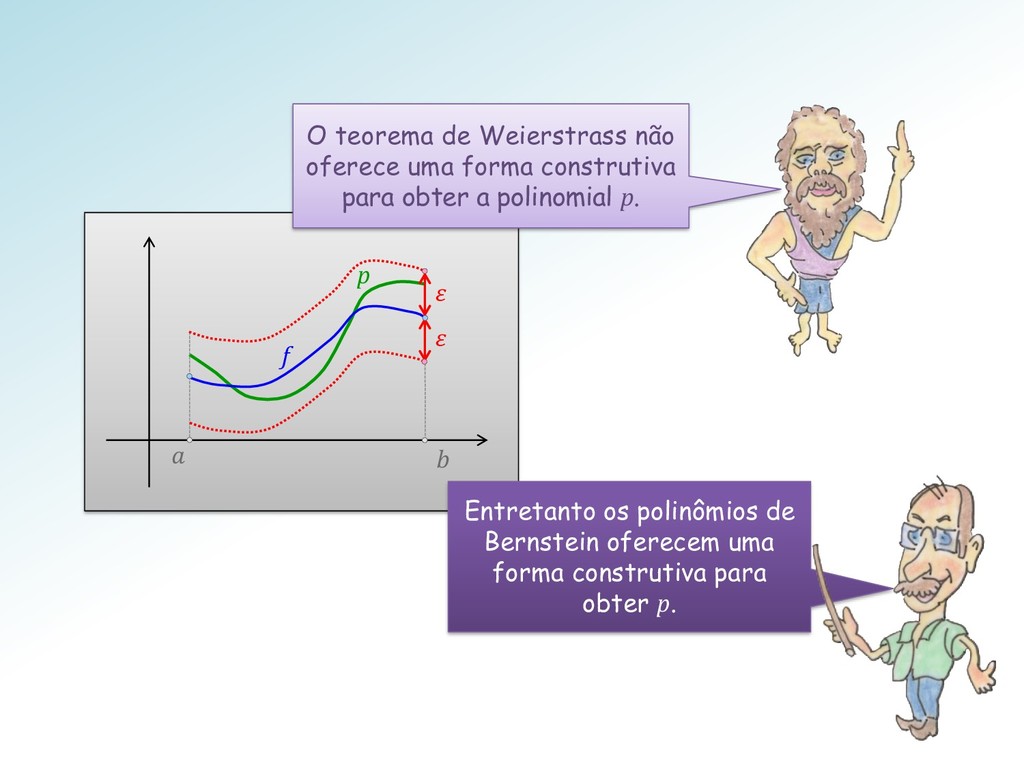
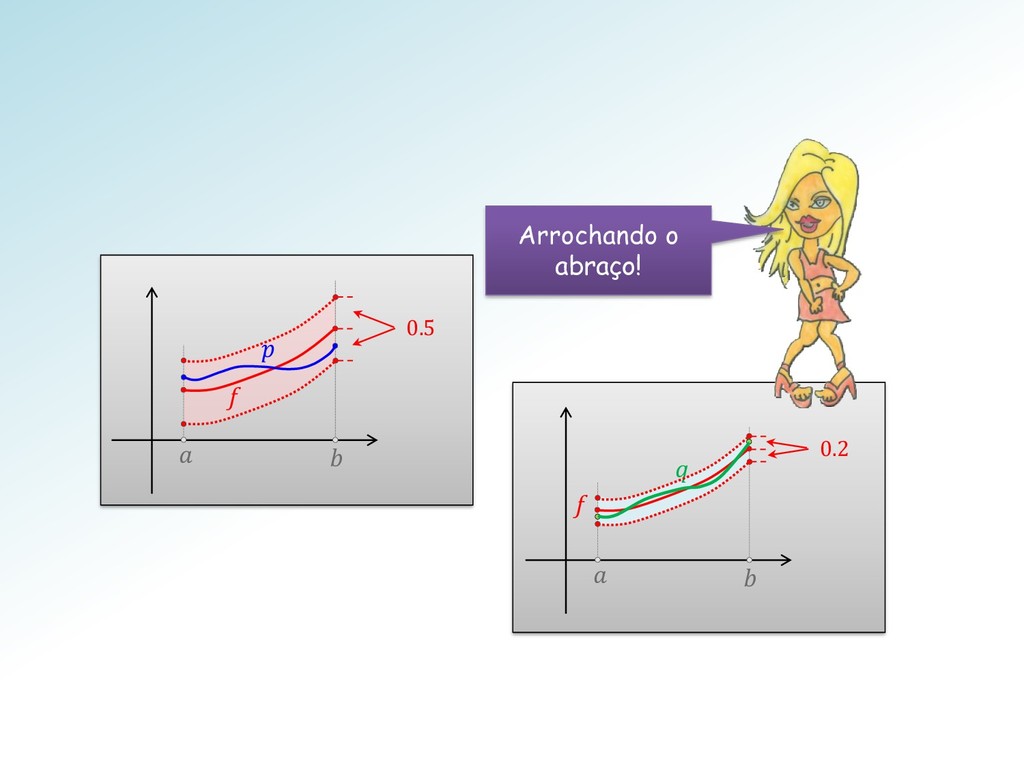
funções de forma uniforme, em todo um intervalo. De fato, sejam , ∈ ℬ , . Afirmar que − ∞ < corresponde a assegurar que g fica dentro de uma faixa com largura uniforme envolta de f . Na figura a faixa rosa, de a até b.
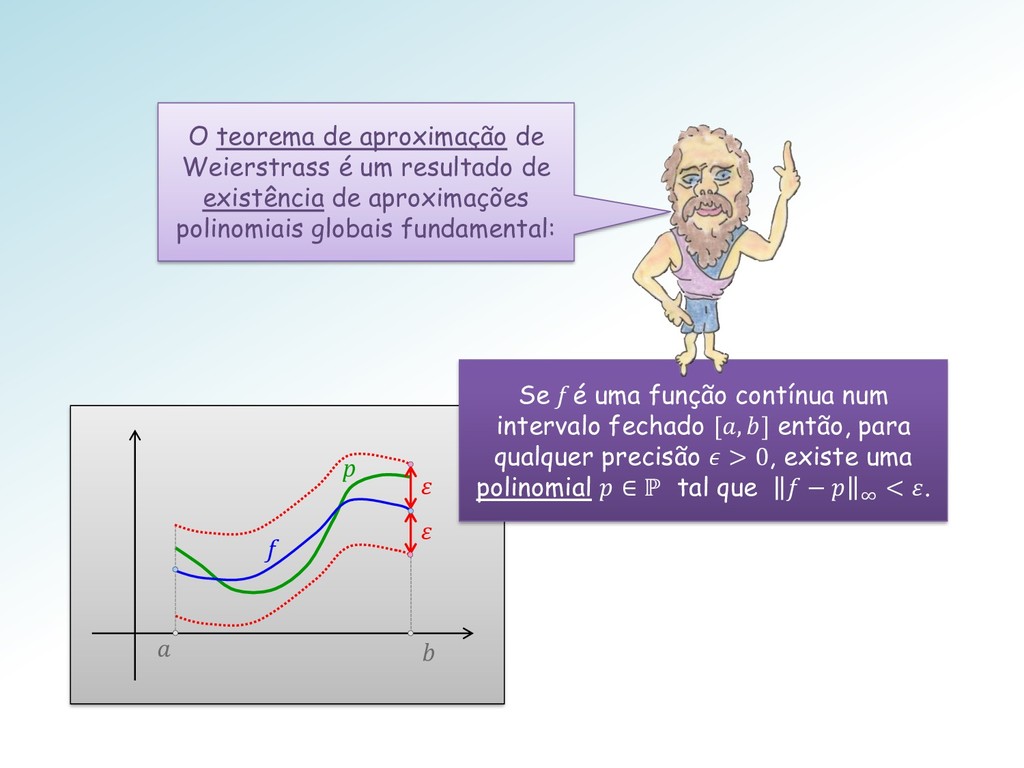
fechado [, ] então, para qualquer precisão > 0, existe uma polinomial ∈ ℙ tal que − ∞ < . O teorema de aproximação de Weierstrass é um resultado de existência de aproximações polinomiais globais fundamental:
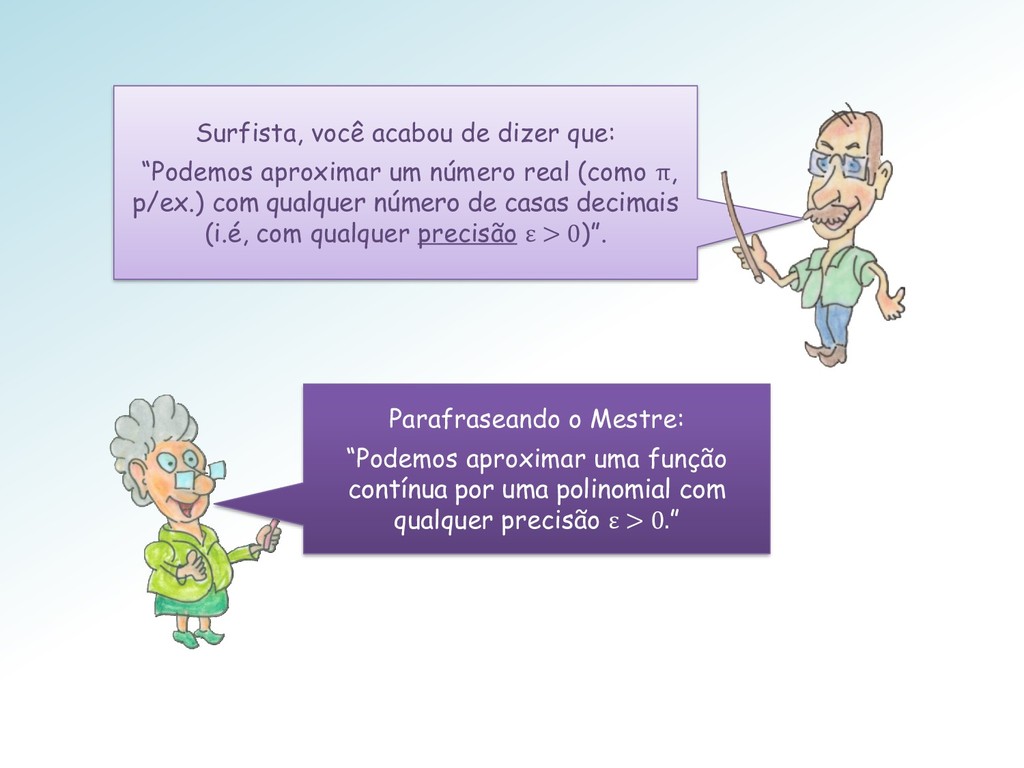
real (como π, p/ex.) com qualquer número de casas decimais (i.é, com qualquer precisão ε > 0)”. Parafraseando o Mestre: “Podemos aproximar uma função contínua por uma polinomial com qualquer precisão ε > 0.”
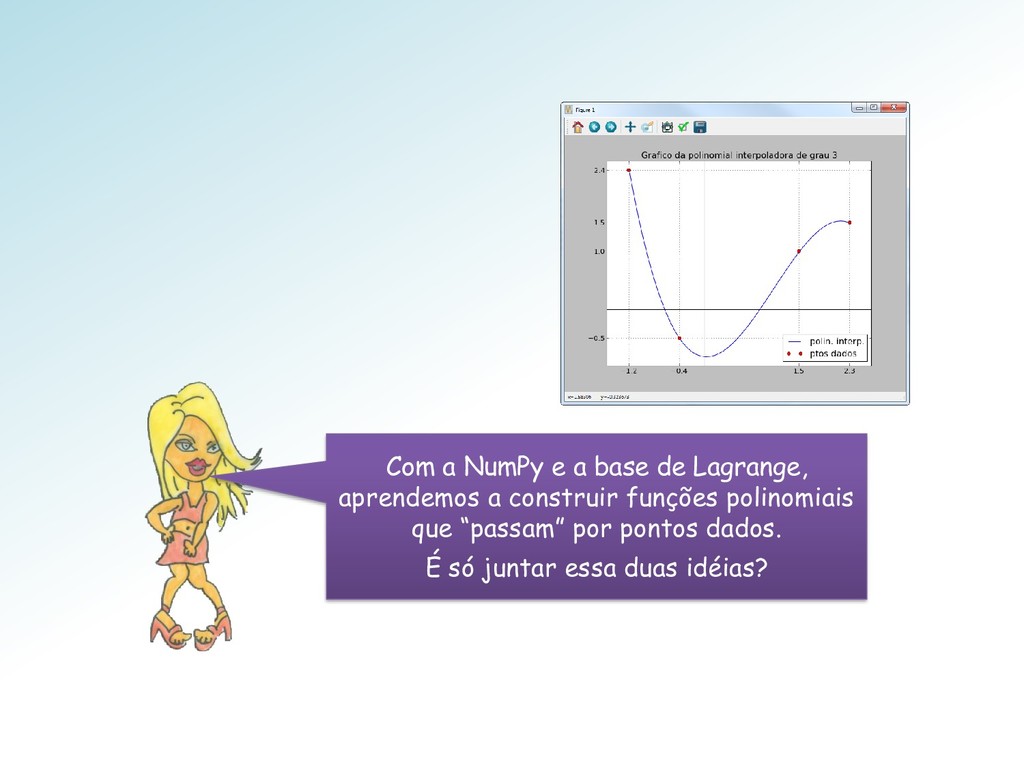
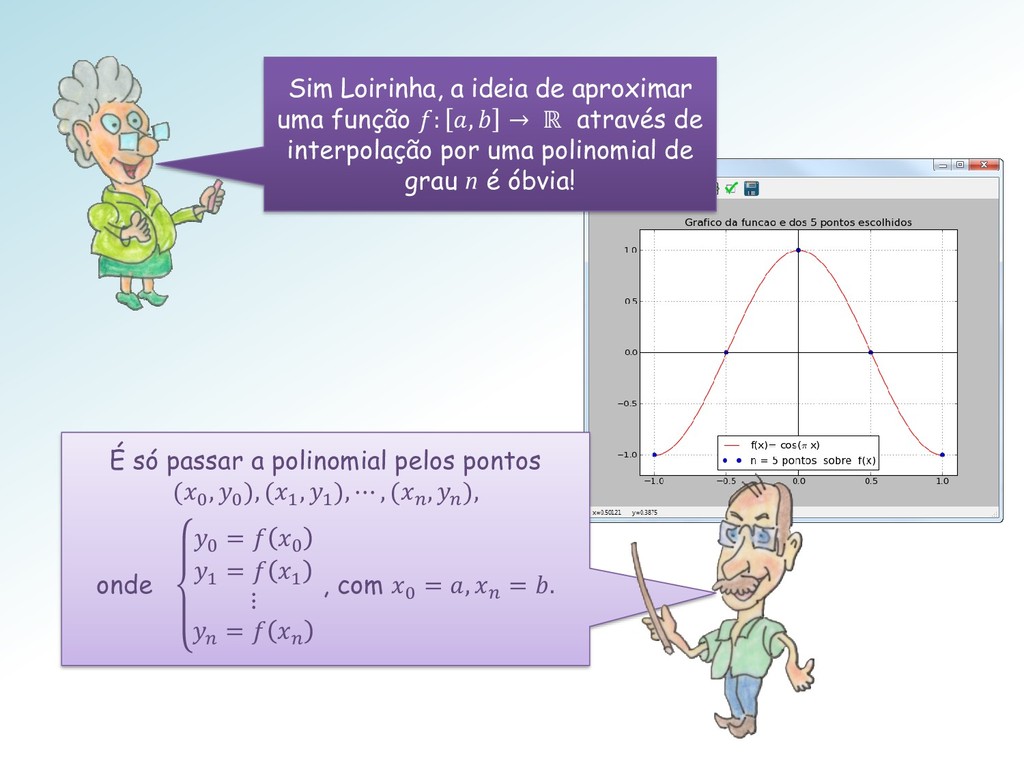
→ ℝ através de interpolação por uma polinomial de grau n é óbvia! É só passar a polinomial pelos pontos (0 , 0 ), (1 , 1 ), ⋯ , ( , ), onde 0 = 0 1 = 1 ⋮ = , com 0 = , = .
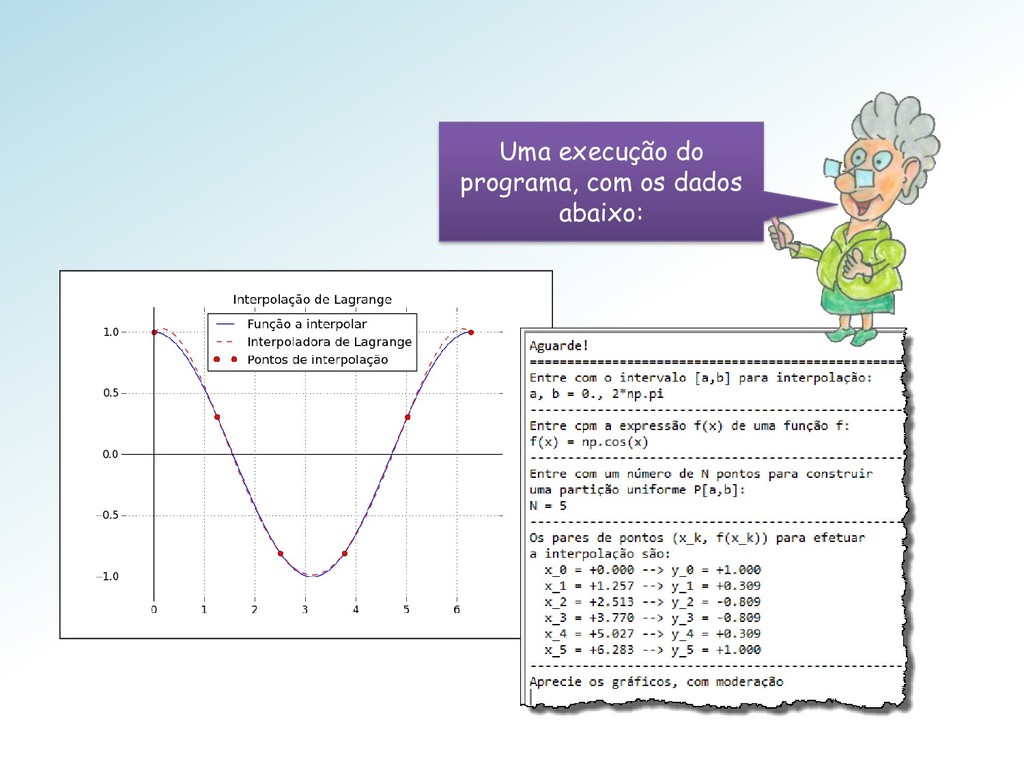
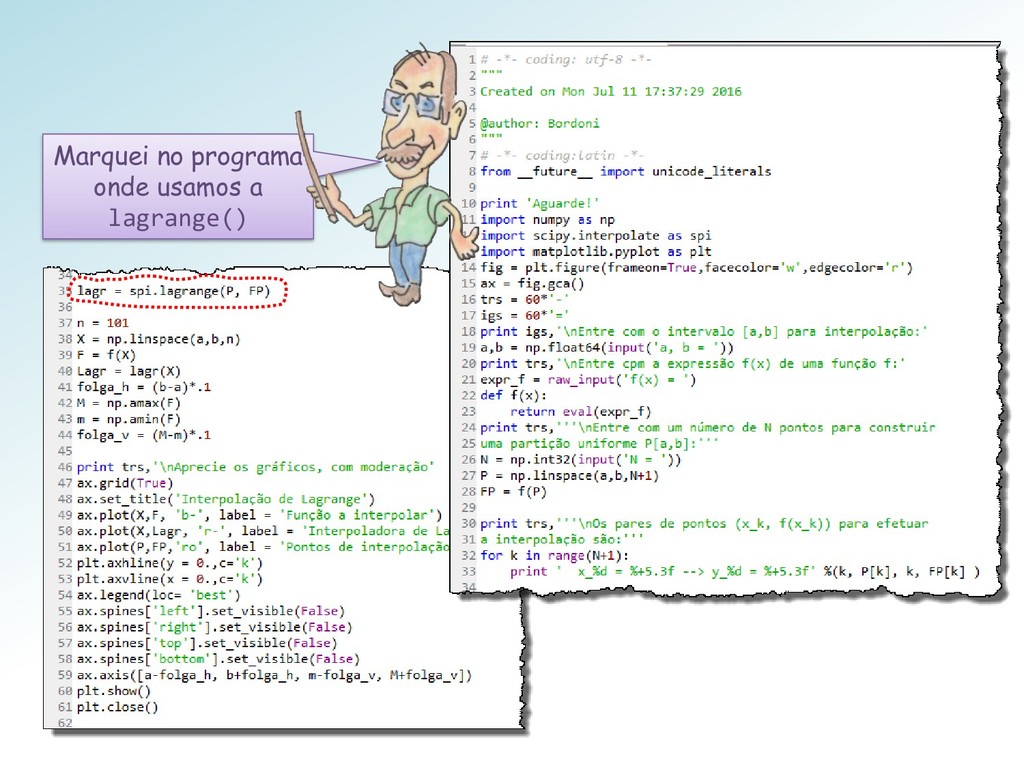
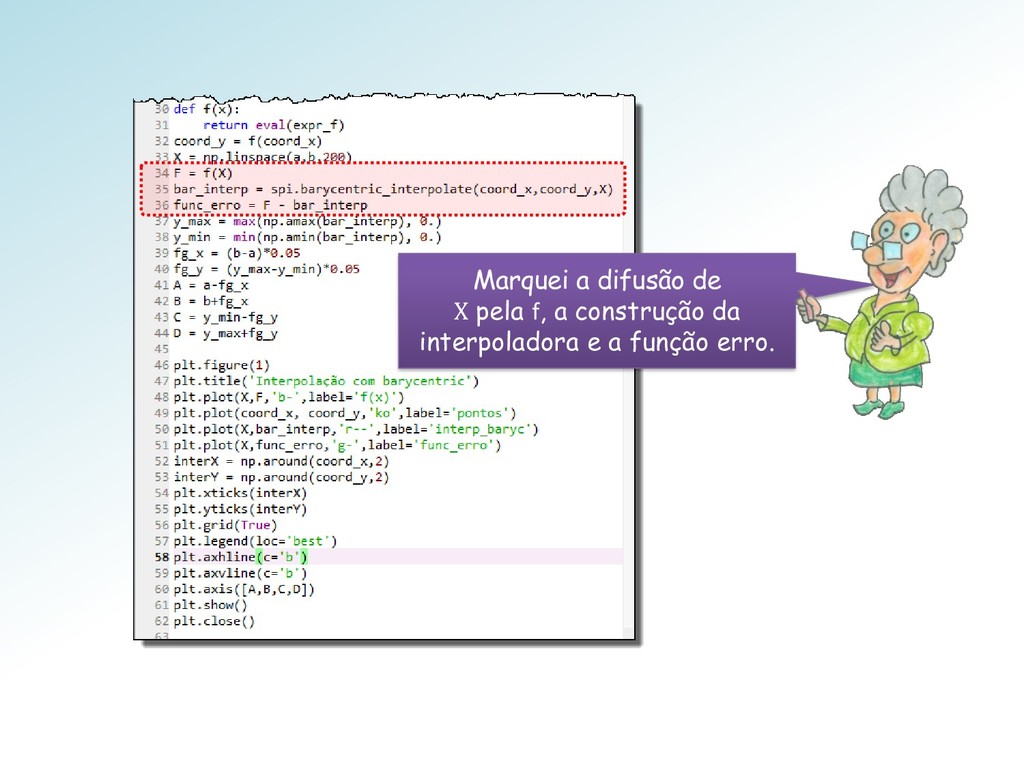
() de uma função, 3. Um número de pontos para criar uma partição uniforme de , . • Constrói a interpoladora de Lagrange da função usando a rotina lagrange() da SciPy. • E devolve: 1. Uma tabela dos pares dos pares , ( ) , 2. Os gráficos de e da interpoladora de Lagrange da função sobre a partição , . Faremos um programa que:
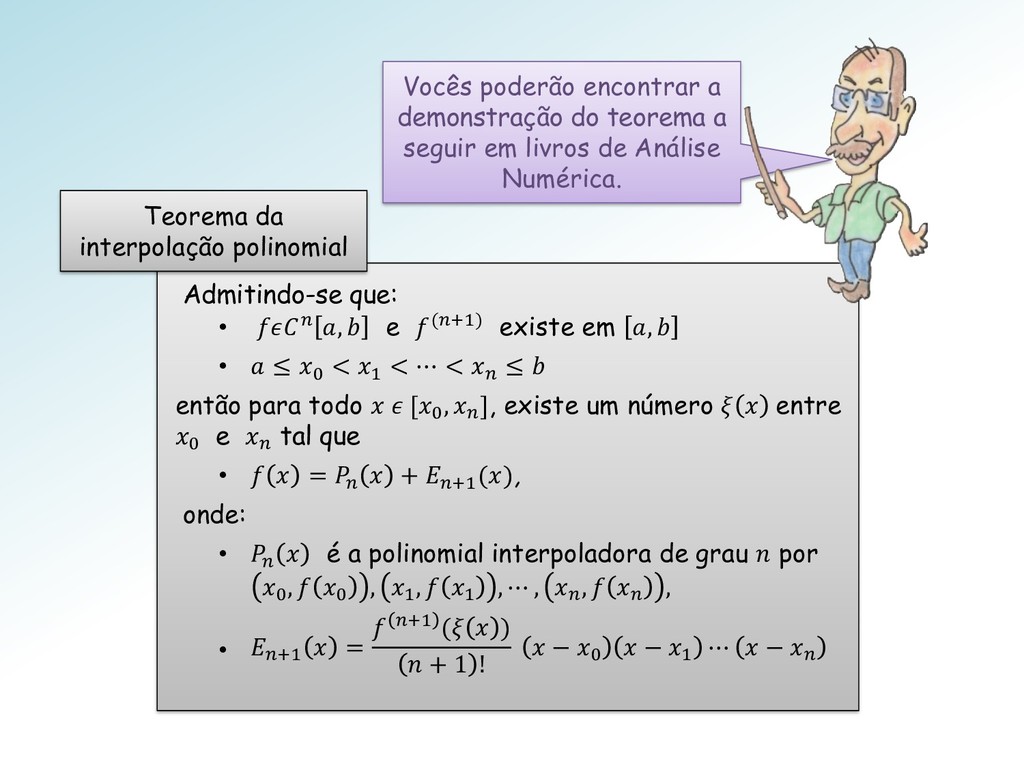
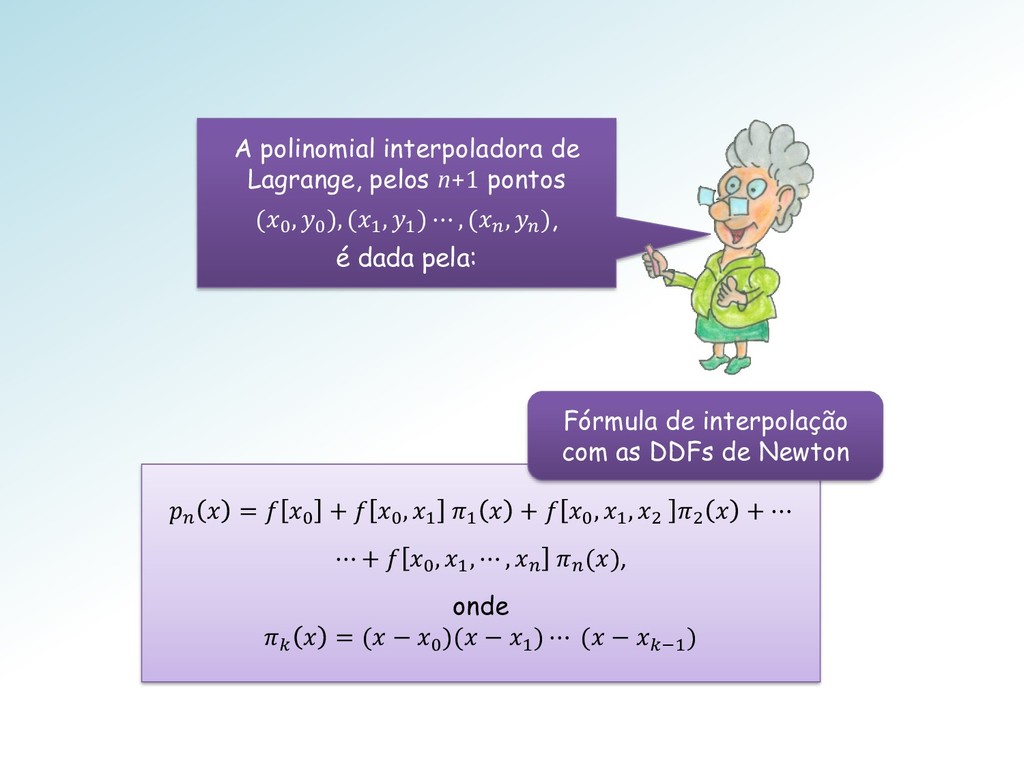
≤ 0 < 1 < ⋯ < ≤ então para todo [0 , ], existe um número entre 0 e tal que • = + +1 (), onde: • é a polinomial interpoladora de grau por 0 , 0 , 1 , 1 , ⋯ , , , • +1 = +1 ( ) + 1 ! − 0 − 1 ⋯ − Teorema da interpolação polinomial Vocês poderão encontrar a demonstração do teorema a seguir em livros de Análise Numérica.
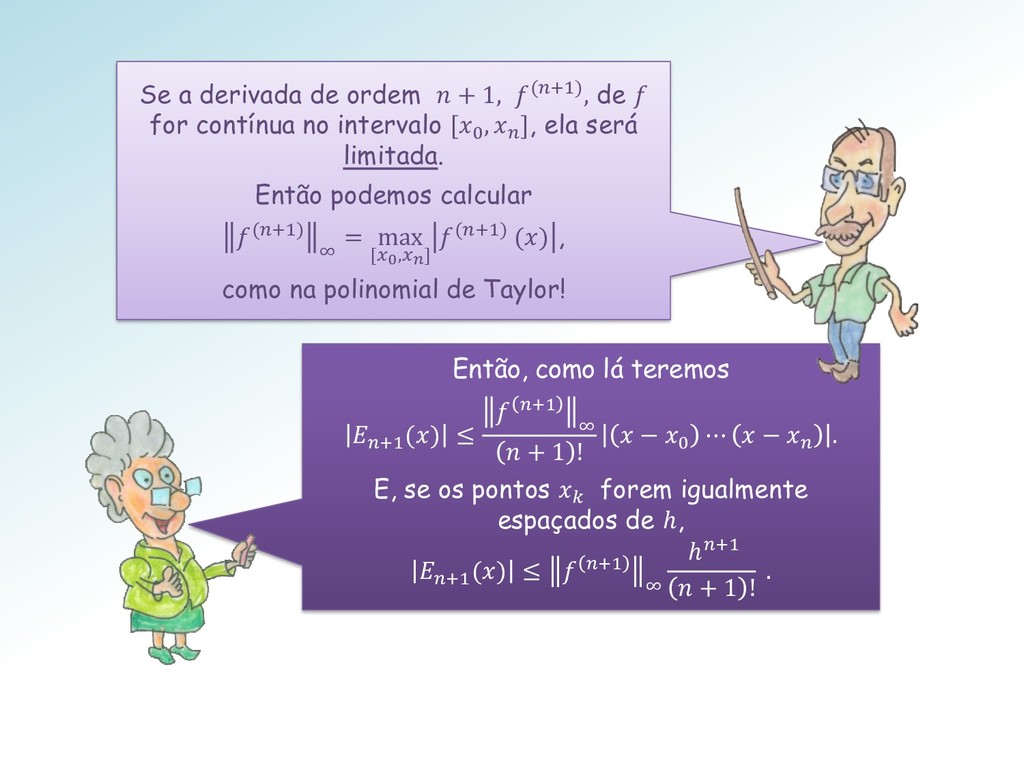
1 ! − 0 ⋯ − . E, se os pontos forem igualmente espaçados de ℎ, +1 () ≤ +1 ∞ ℎ+1 + 1 ! . Se a derivada de ordem + 1, (+1), de for contínua no intervalo [0 , ], ela será limitada. Então podemos calcular (+1) ∞ = max [0,] (+1) () , como na polinomial de Taylor!
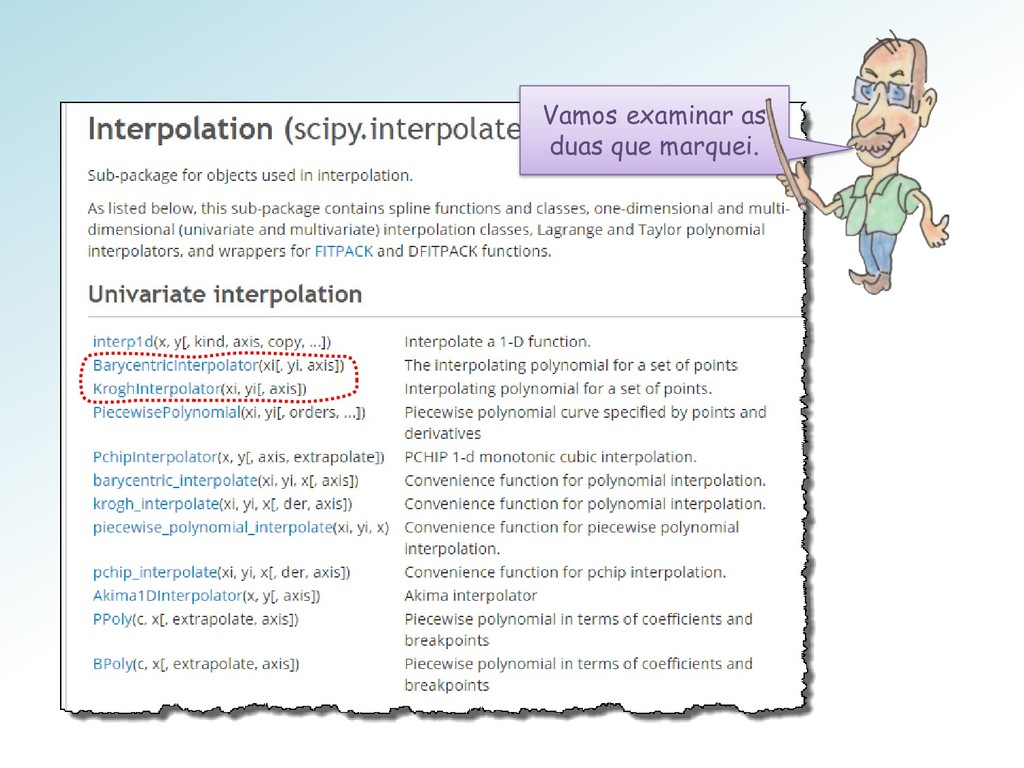
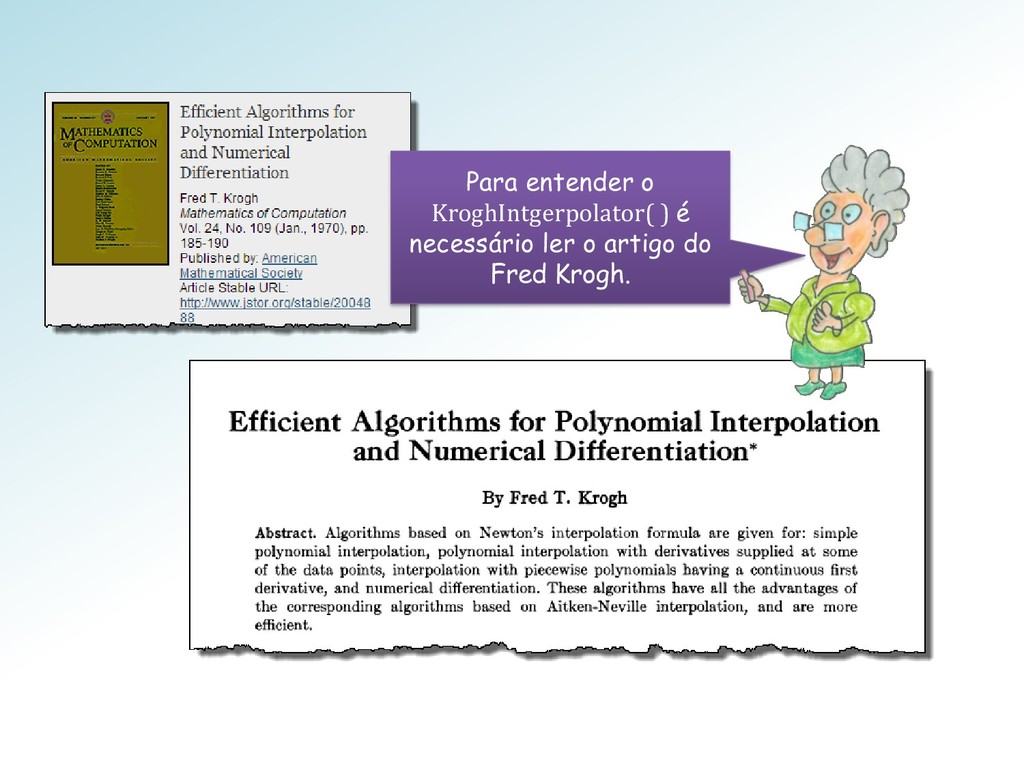
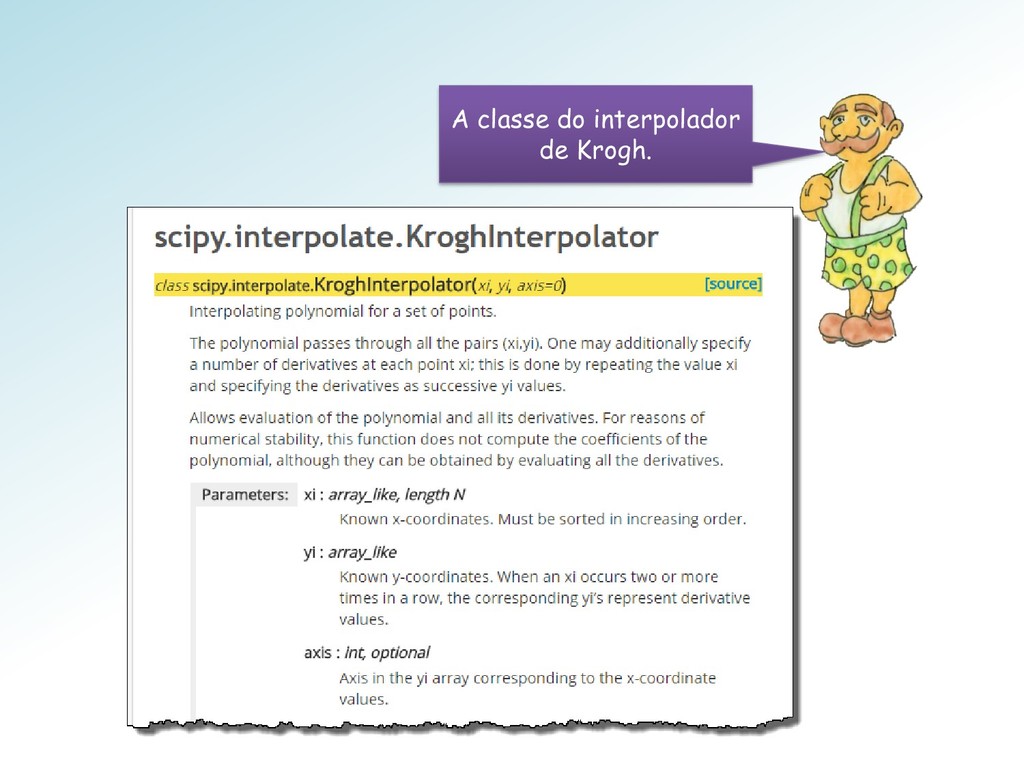
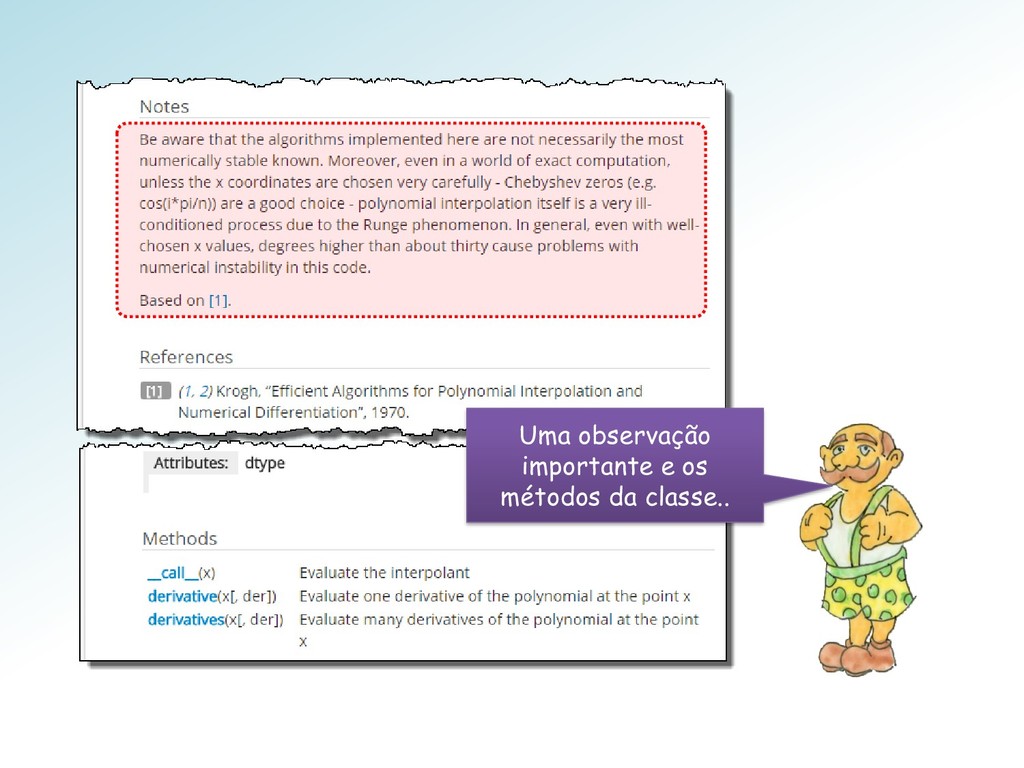
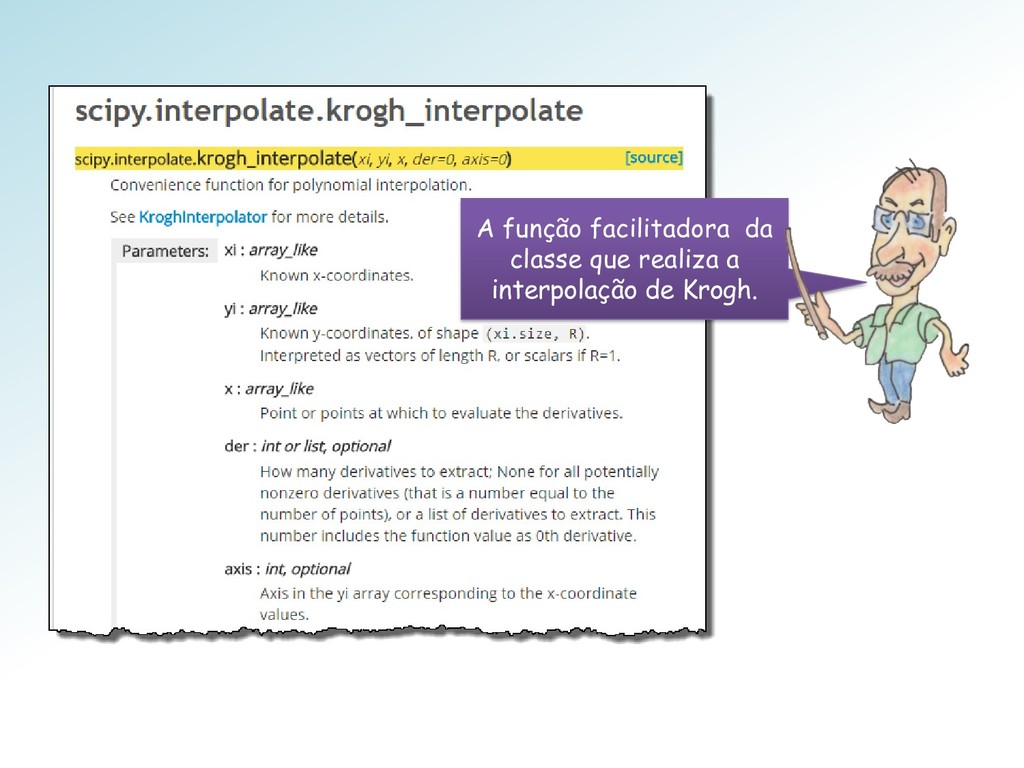
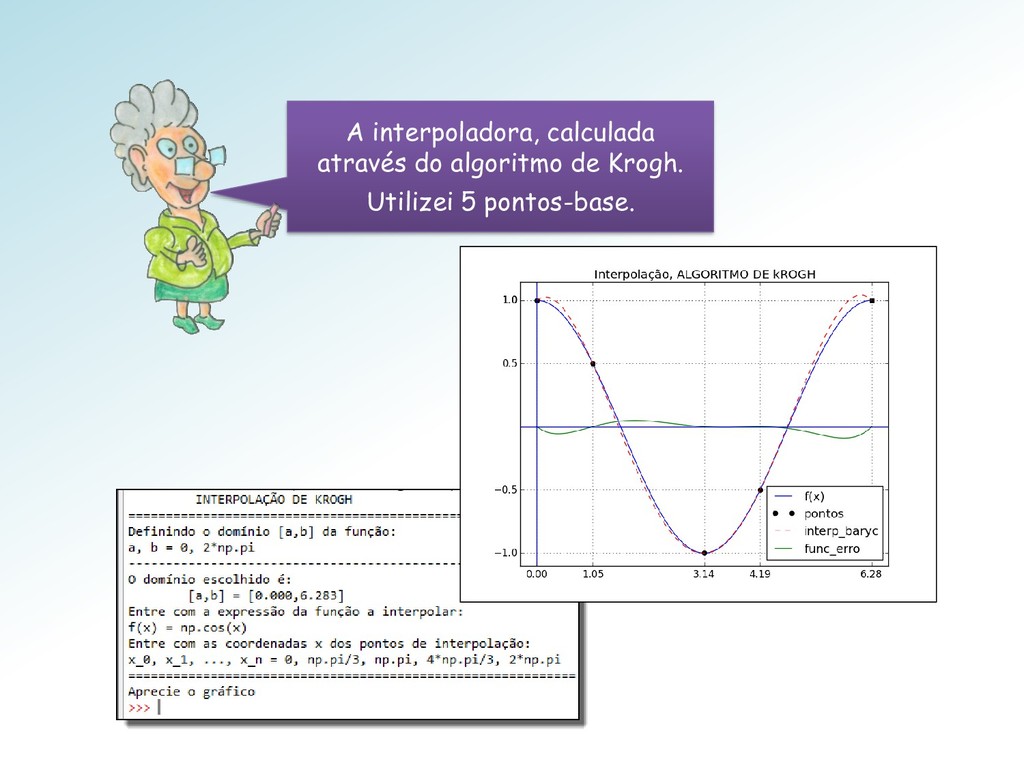
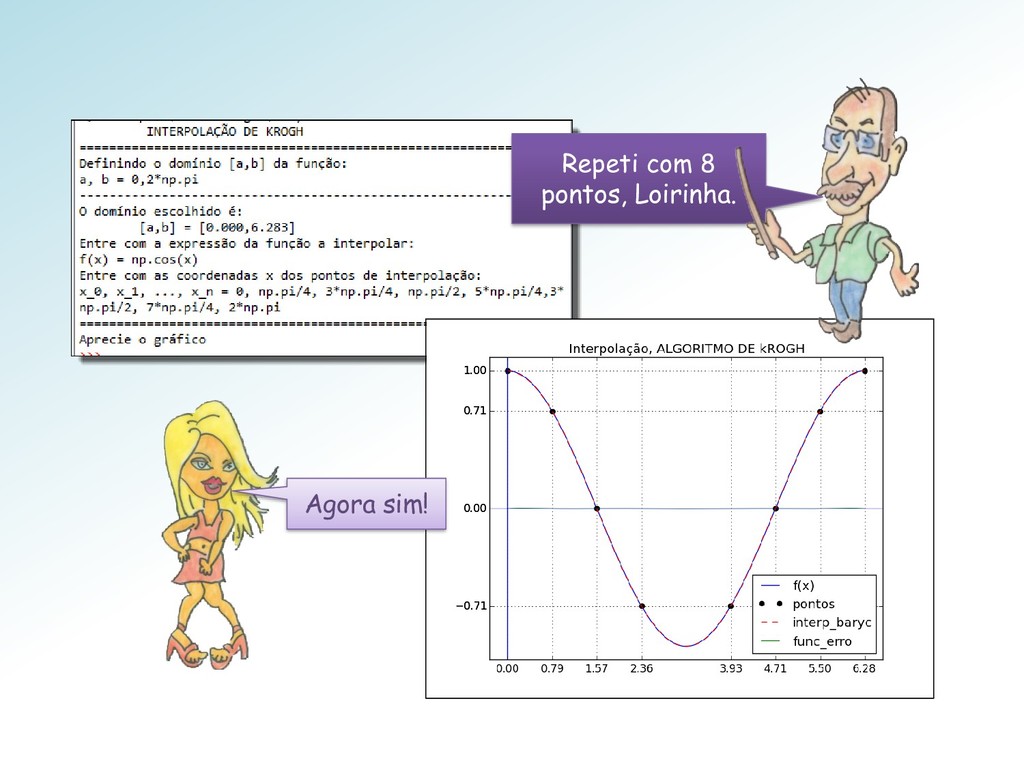
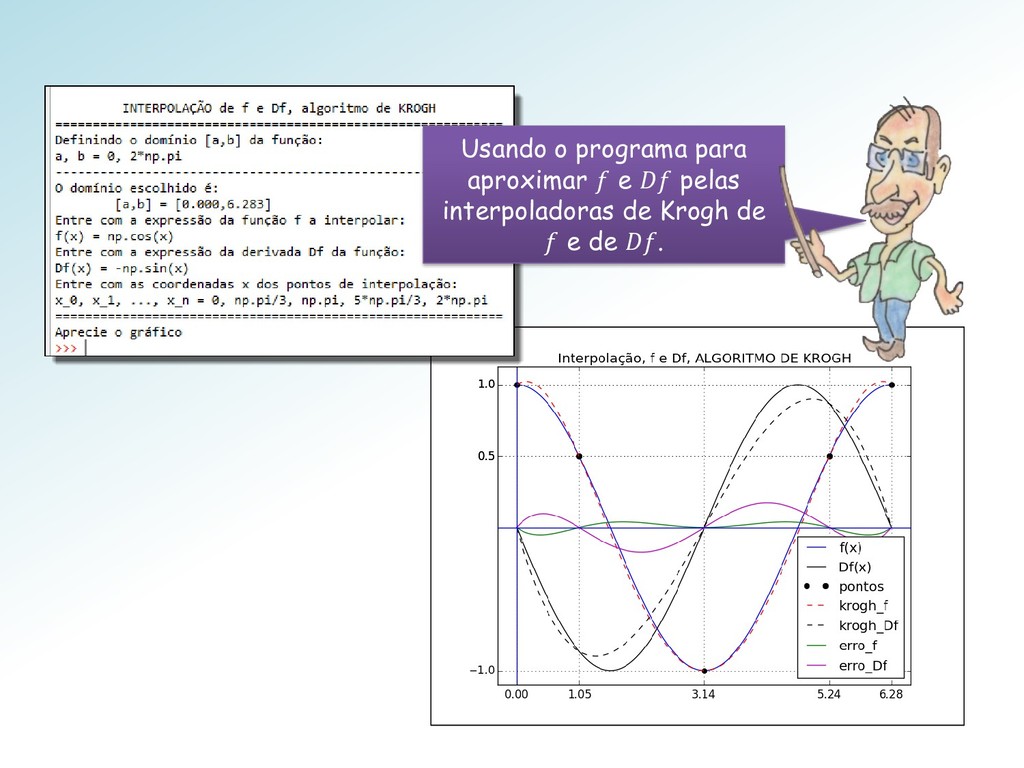
detalhados os algoritmos de Krogh empregados pela scipy.interpolate Inclusive o artigo compara número de operações com os algoritmos de Lagrange e Aitken/Neville, mostrando que os propostos por Krogh tem melhor performance.
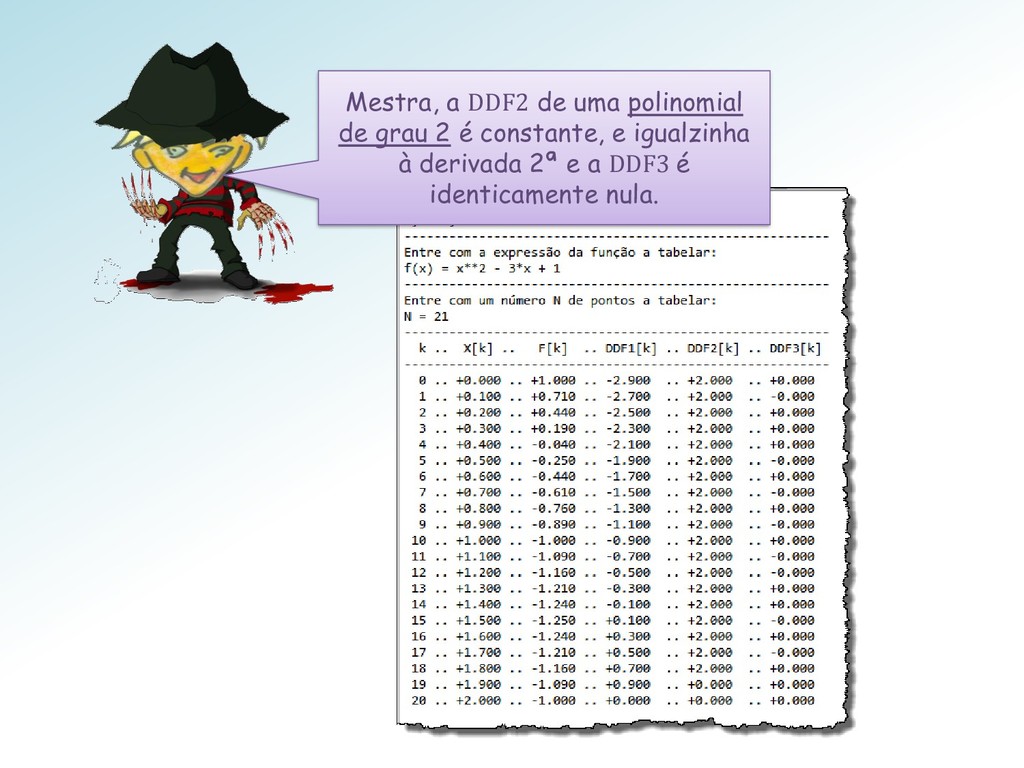
período anterior disse que o professor exigia que essas tabelas de DDF fossem feitas à mão. Já ouvi falar dessa besteira. São mestres da idade da pedra.
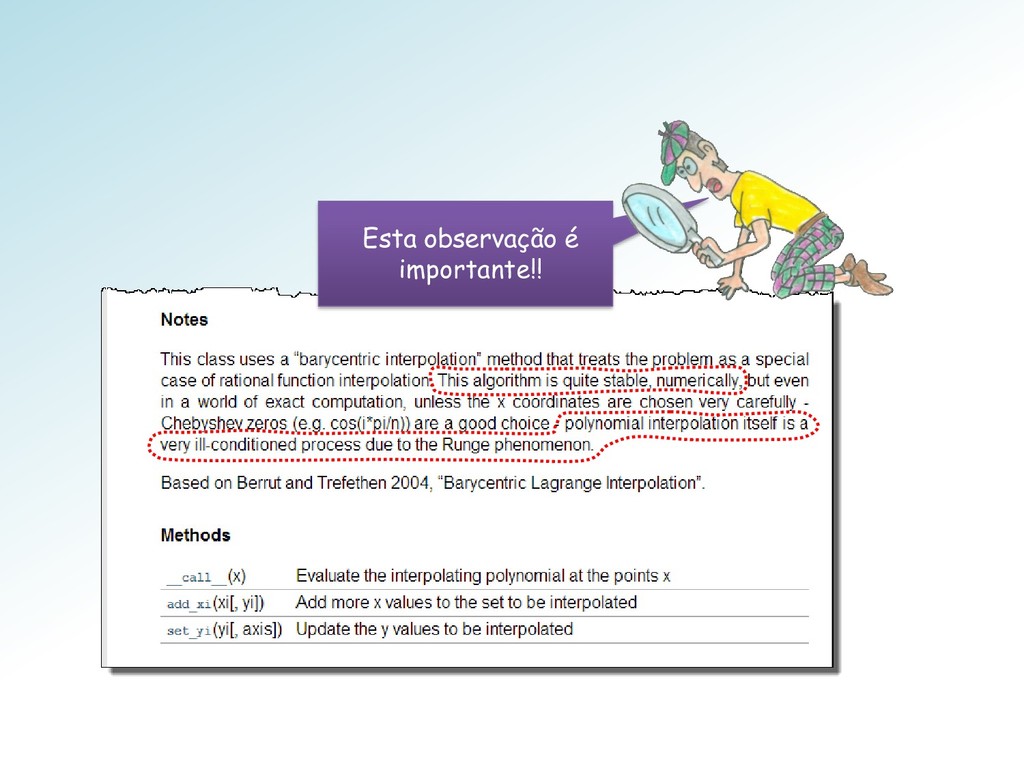
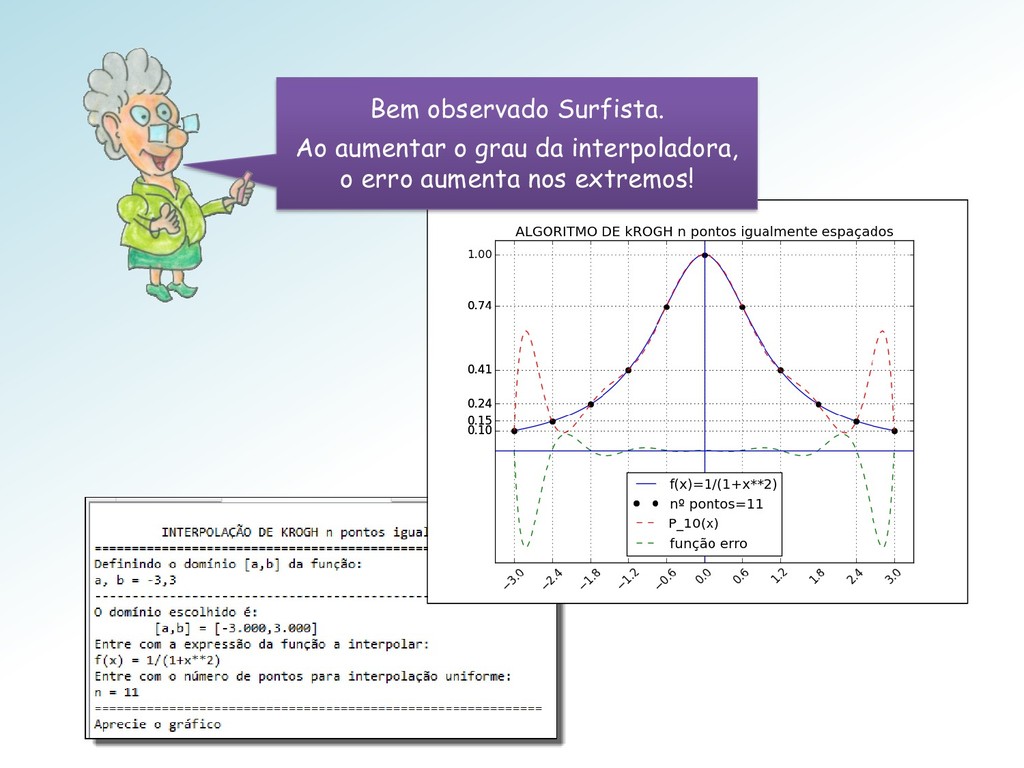
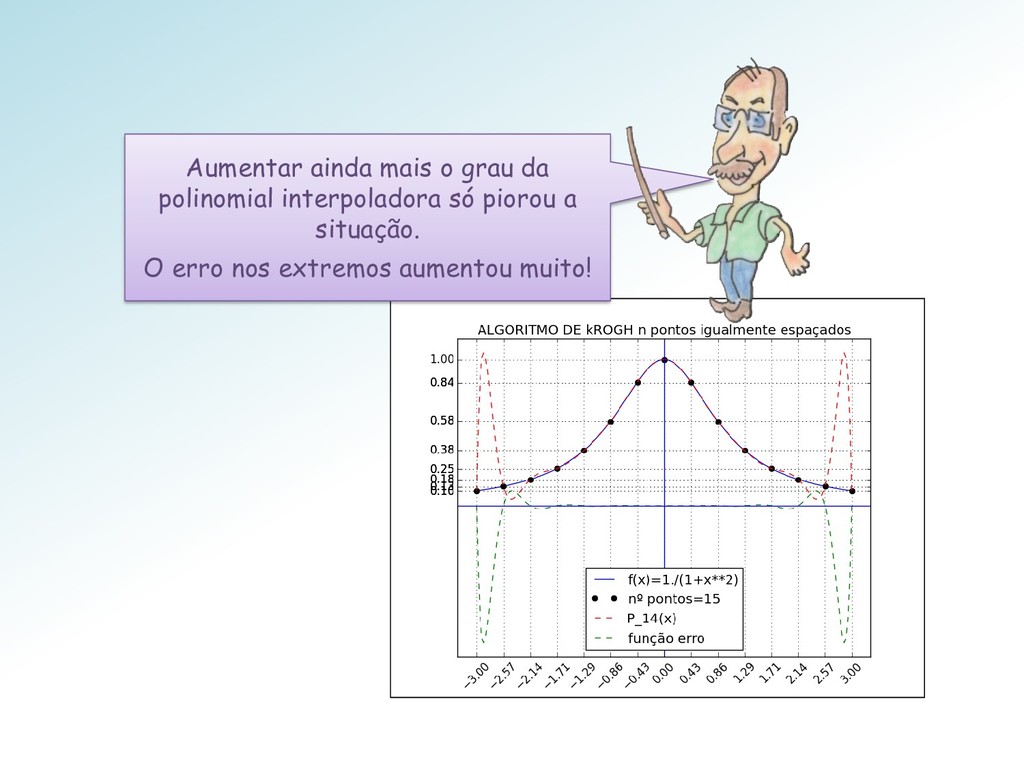
ao aumentarmos o grau da interpoladora, surge o fenômeno de Runge! Mestres, parece que aumentar o grau da polinomial interpoladora não melhora a precisão da interpolação.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![As 4 polinomiais (vetores) da base canônica de 3[−1,1].](https://files.speakerdeck.com/presentations/f44ac818dfbd4e1f9e7a3b312e0b0c8d/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Em ℙ2[, ], que tem dimensão três, as funções básicas](https://files.speakerdeck.com/presentations/f44ac818dfbd4e1f9e7a3b312e0b0c8d/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Esse teorema de Weierstrass informa que ℙ[, ] é denso](https://files.speakerdeck.com/presentations/f44ac818dfbd4e1f9e7a3b312e0b0c8d/slide_52.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![• Recebe: 1. Um intervalo [, ], 2. A expressão](https://files.speakerdeck.com/presentations/f44ac818dfbd4e1f9e7a3b312e0b0c8d/slide_61.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
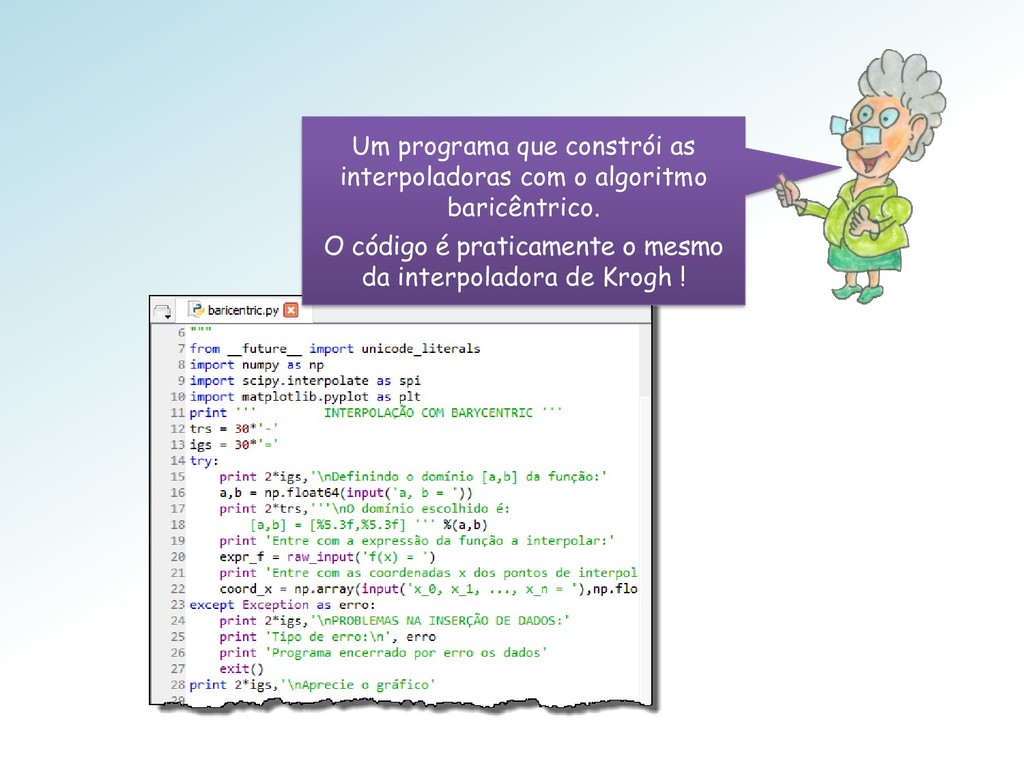
![Um programa para interpolar uma função : [, ] →](https://files.speakerdeck.com/presentations/f44ac818dfbd4e1f9e7a3b312e0b0c8d/slide_94.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}