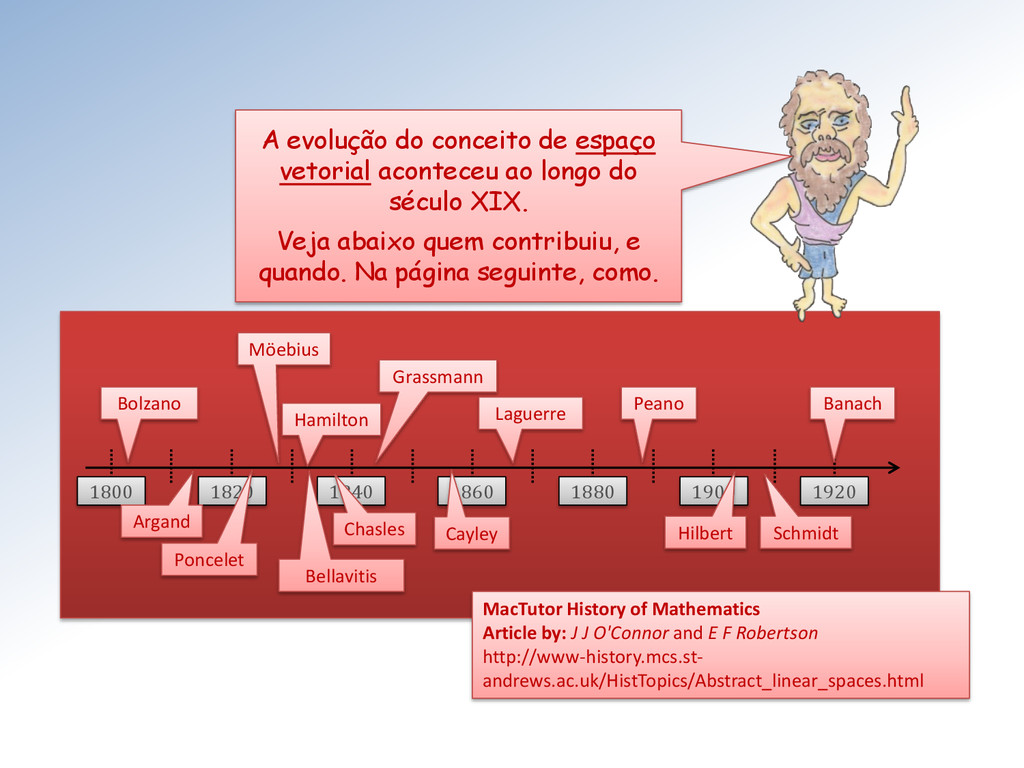
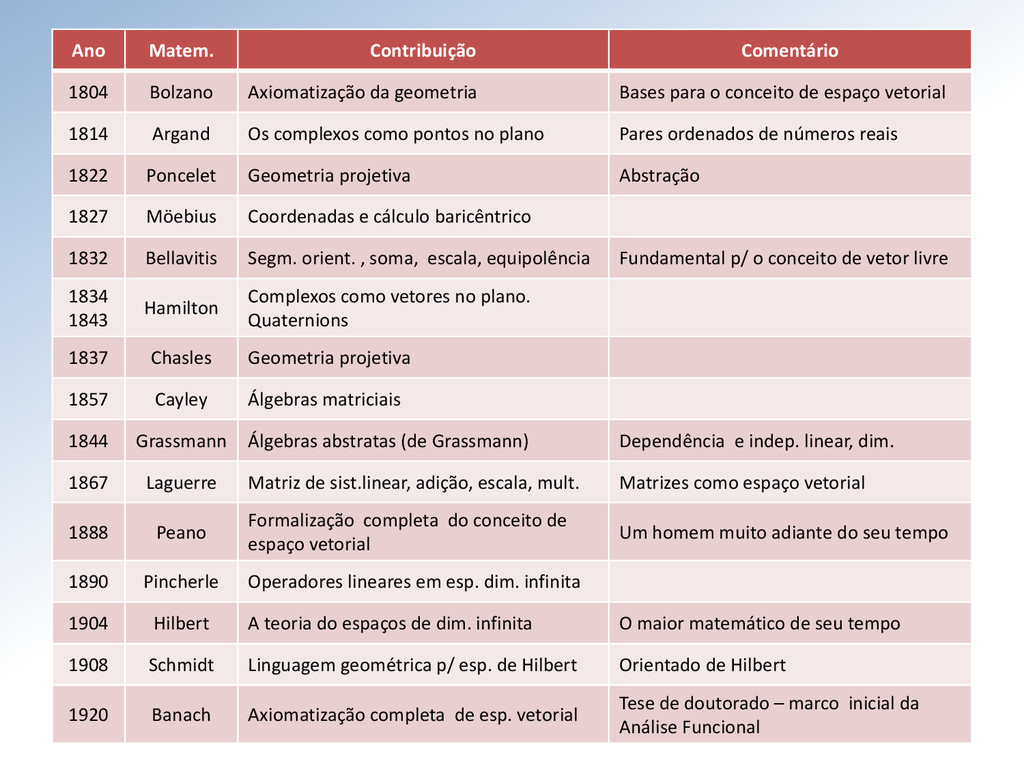
Começo reportando a evolução para a abstração do conceito de espaços vetoriais. Depois apresento o espaço das funções reais a valores reais, discuto a ideia de subespaço vetorial e apresento diversos exemplos (polinomiais, matrizes triangulares, simétricas, etc). Em seguida discuto subespaços gerados, dependência e independência linear, bases e dimensão. Apresento o grupo Bourbaki e o conceito de estruturas algébricas - grupos, corpos e álgebras lineares. Ao final apresento o conceito de espaço vetorial normado, de produto interno e a ideia de espaços de Banach e Hibert. Mostro como calcular a norma de algumas funções.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Mestre, escolha = [, ] e mostre a soma e](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_9.jpg){kind=link}
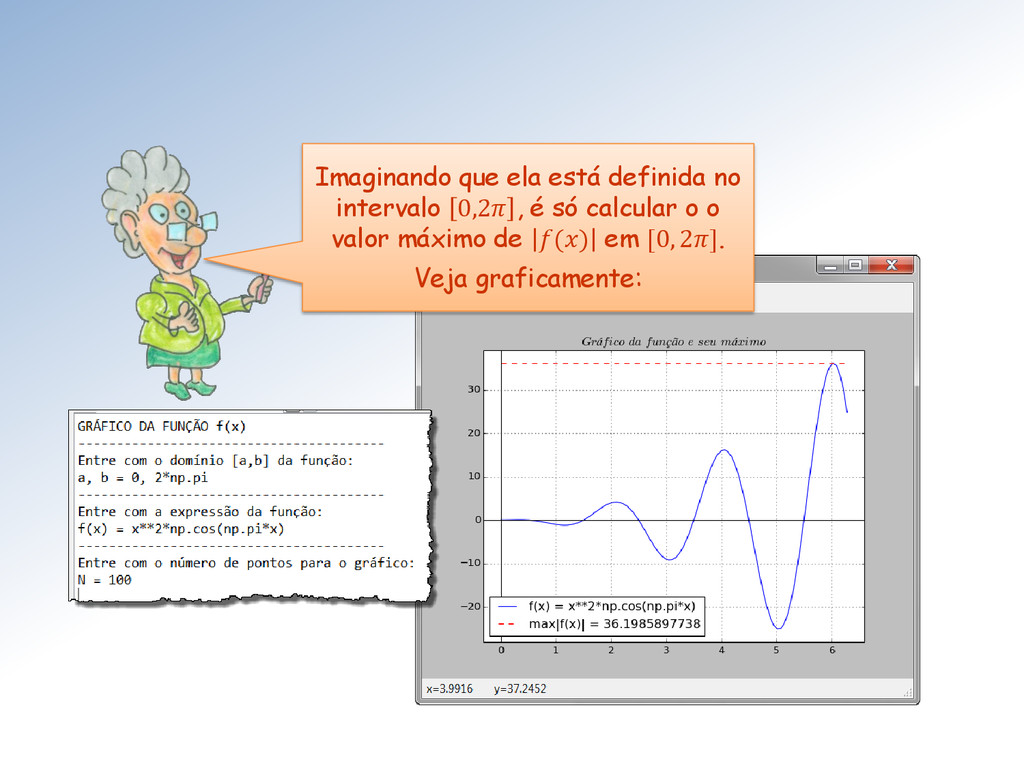
![Aqui estamos pedindo o intervalo [a, b] e gerando o](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_10.jpg){kind=link}
{kind=link}
![Observem que para cada ponto x em [0 ,1], a](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_12.jpg){kind=link}
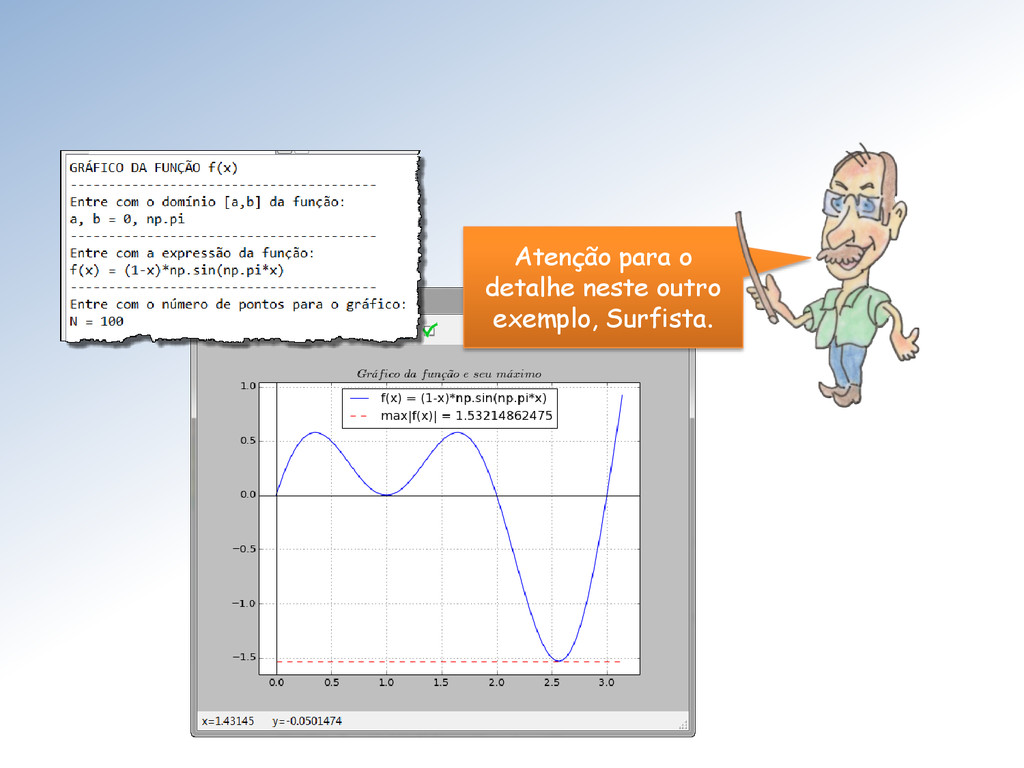
![Aqui estamos pedindo o intervalo [a, b], gerando o código](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_13.jpg){kind=link}
{kind=link}
![Observem que para cada ponto x em [-1 ,1], a](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![As funções contínuas em [0, 1] constituem um subespaço de](https://files.speakerdeck.com/presentations/fa230870a1680131df5a2e03a5f0f4cc/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}