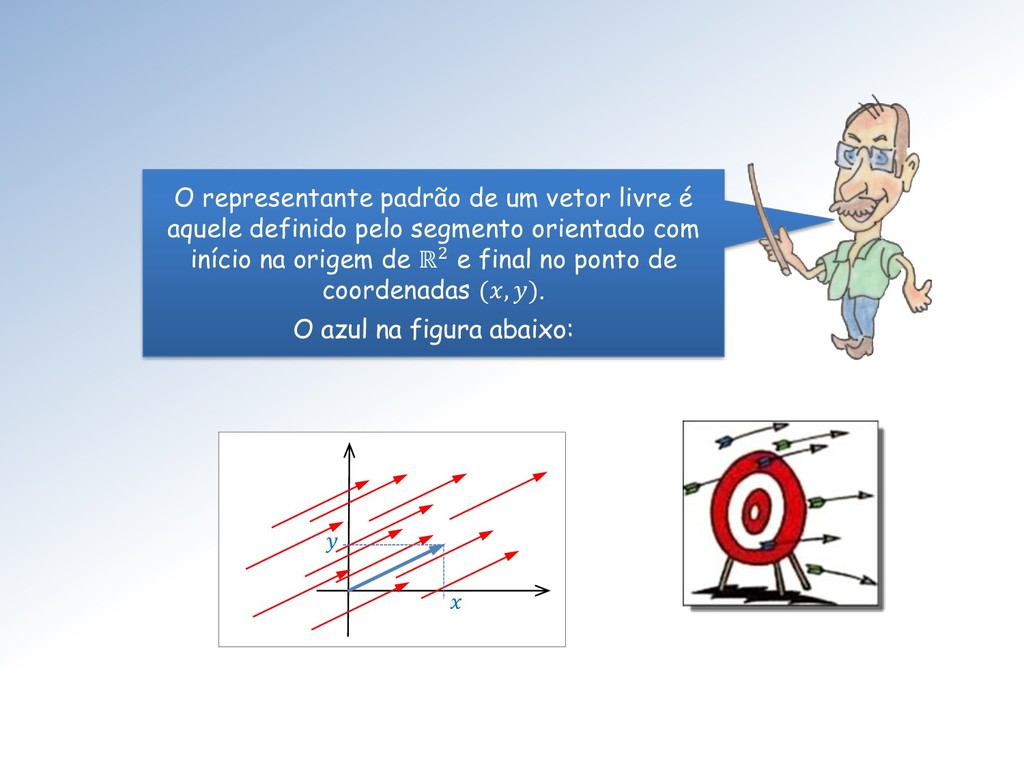
algebricamente por equações. Os sistemas de coordenadas permitiram identificar pontos por pares (, ) ∈ ℝ2 ou ternas (, , ) ∈ ℝ3 de coordenadas cartesianas.
plano inclinado o espaço a percorrer é maior que na vertical, Loirinha. Assim fica mais fácil perceber a diferença nos tempos de percurso para bolas de massas diferentes ou para inclinações distintas!
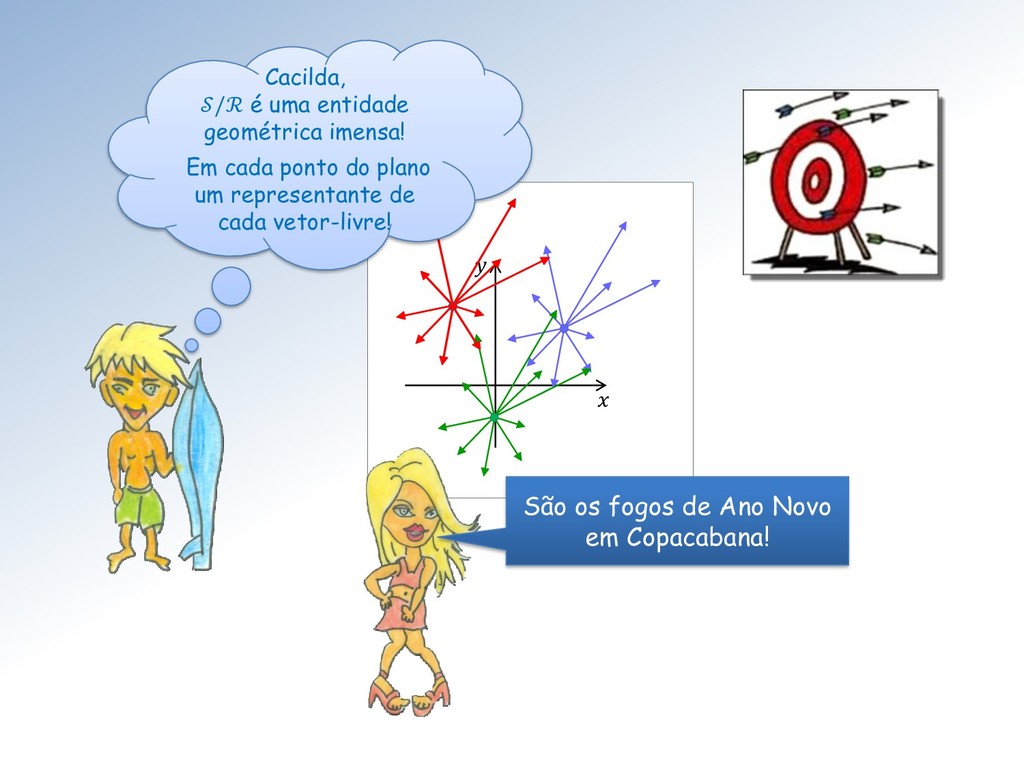
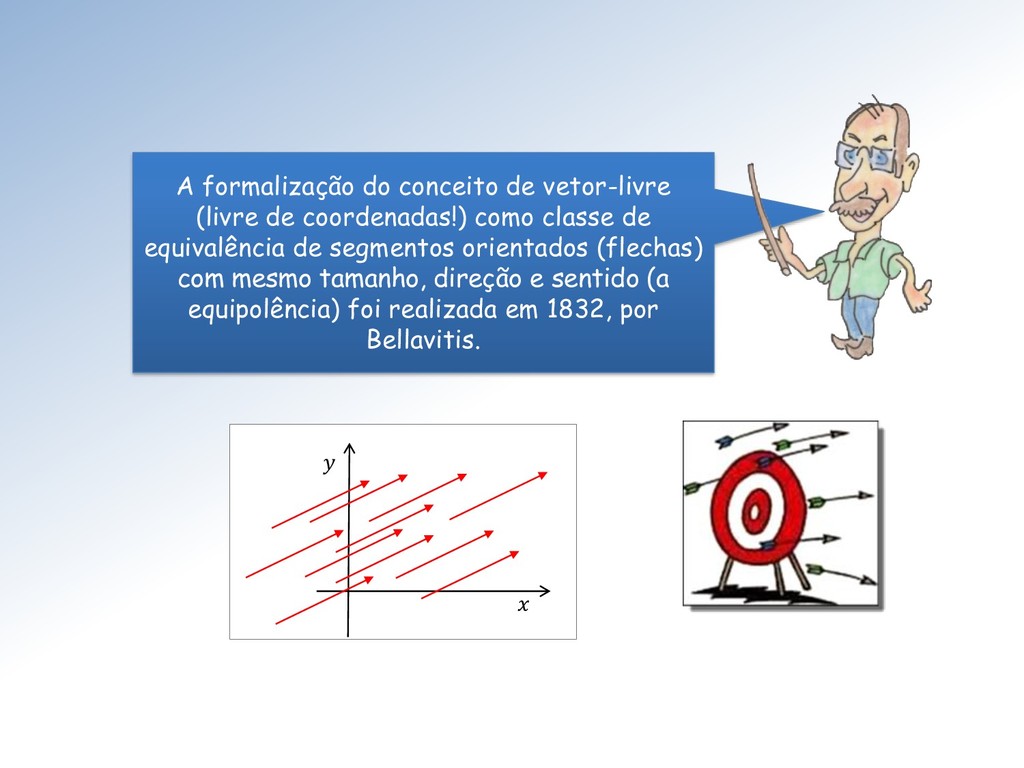
conjunto (de fato em × ), satisfazendo as propriedades: • Reflexiva: ℛ • Simétrica: ℛ ⟹ ℛ • Transitiva: ℛ e ℛ ⟹ ℛ Um vetor-livre (livre de coordenadas) é a classe de equivalência de todos os segmentos orientados que possuem os mesmos tamanho, direção e sentido.
as classes de equivalência estão no chamado conjunto quociente /ℛ. Em outras palavras: ∈ Τ ℛ ⟺ ( ∀, ∈ ↔ ℛ ) A magnitude (tamanho, grandeza, intensidade) de um vetor-livre é a medida de qualquer segmento orientado da classe à que ele pertence. Idem para sua direção e sentido.
pela relação de equipolência ℛ definida no conjunto dos segmentos orientados em ℝ2 por ℛ ⟺ e possuem os mesmos ቐ tamanho direção sentido Portanto um vetor-livre é uma abstração matemática.
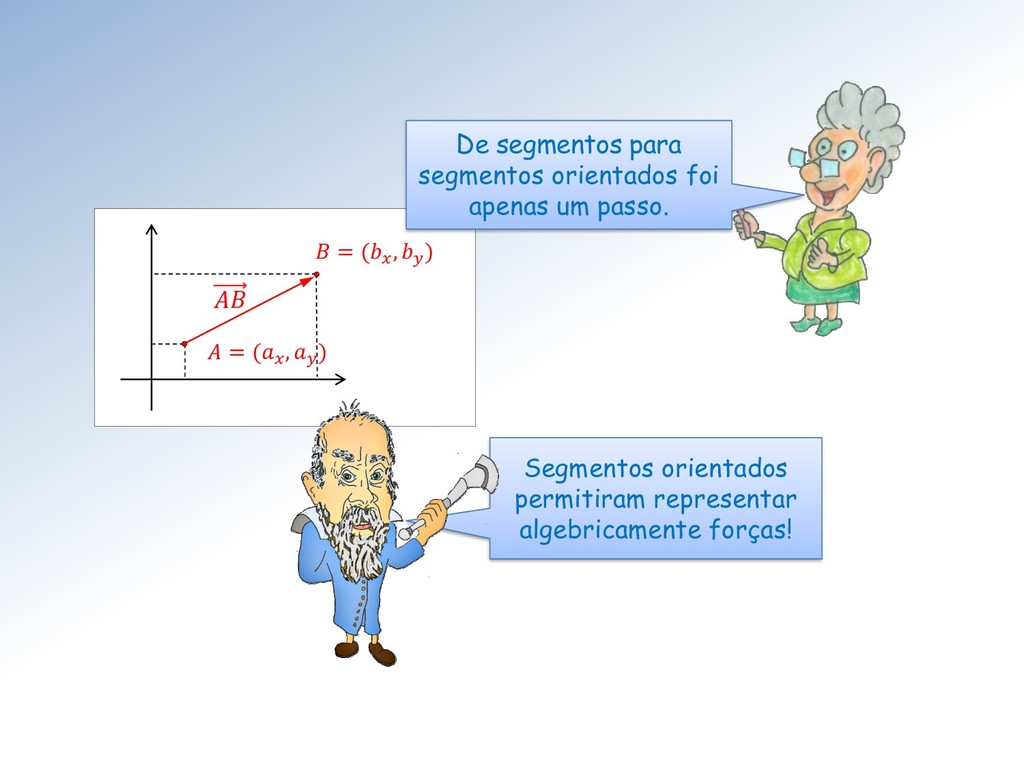
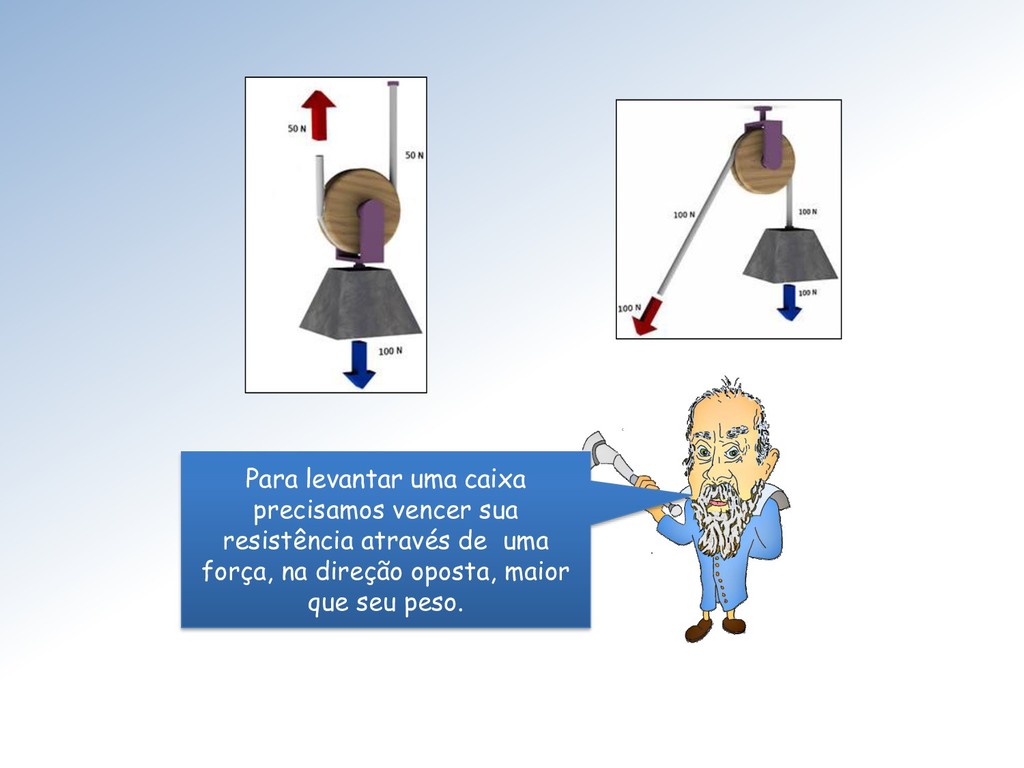
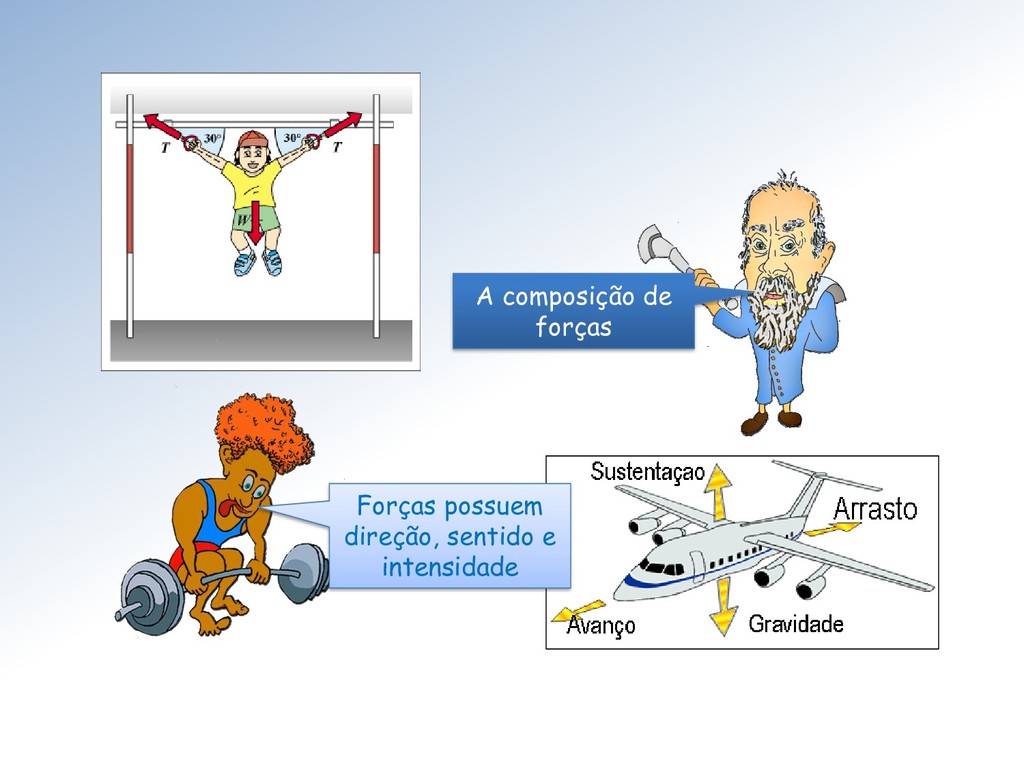
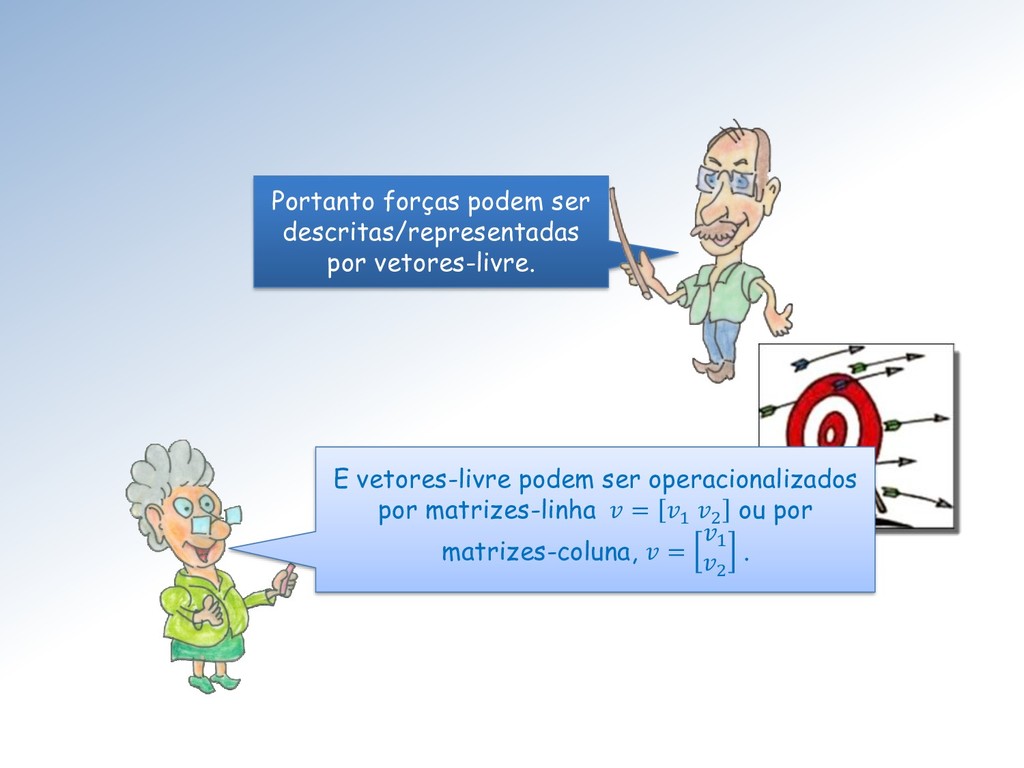
Possuem direção, sentido e magnitude. Normalmente são aplicadas num ponto específico de um corpo – a força peso no centro de massa. O conceito de vetor-livre é extremamente utilizado em física e engenharias, por exemplo na composição de forças.
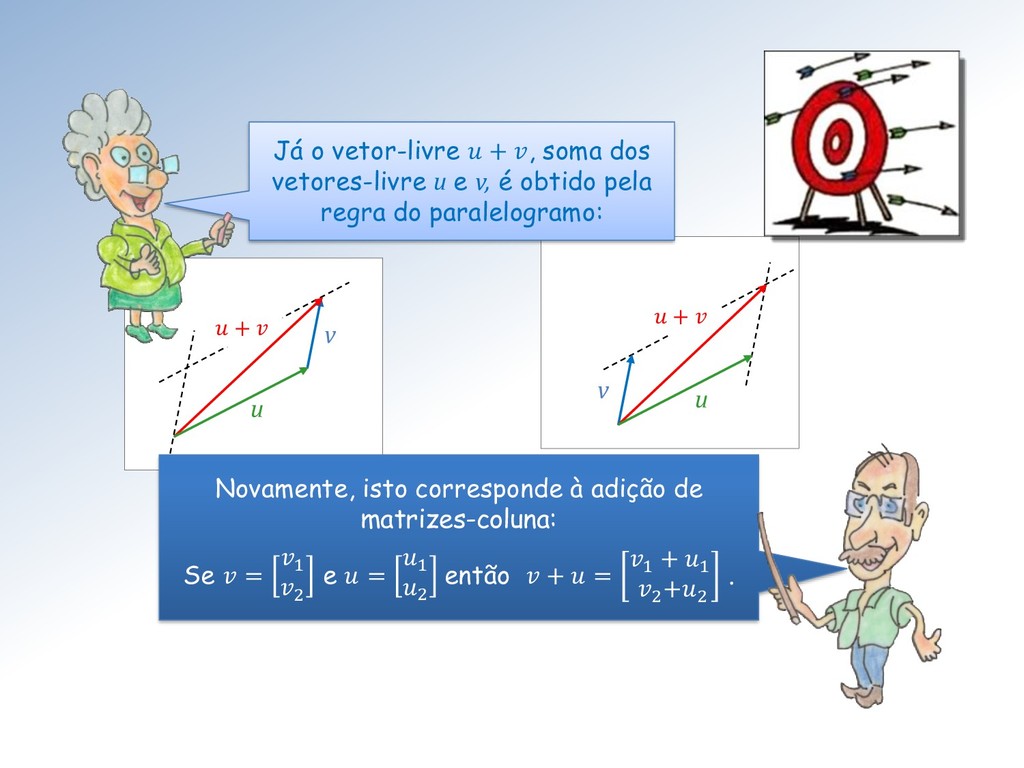
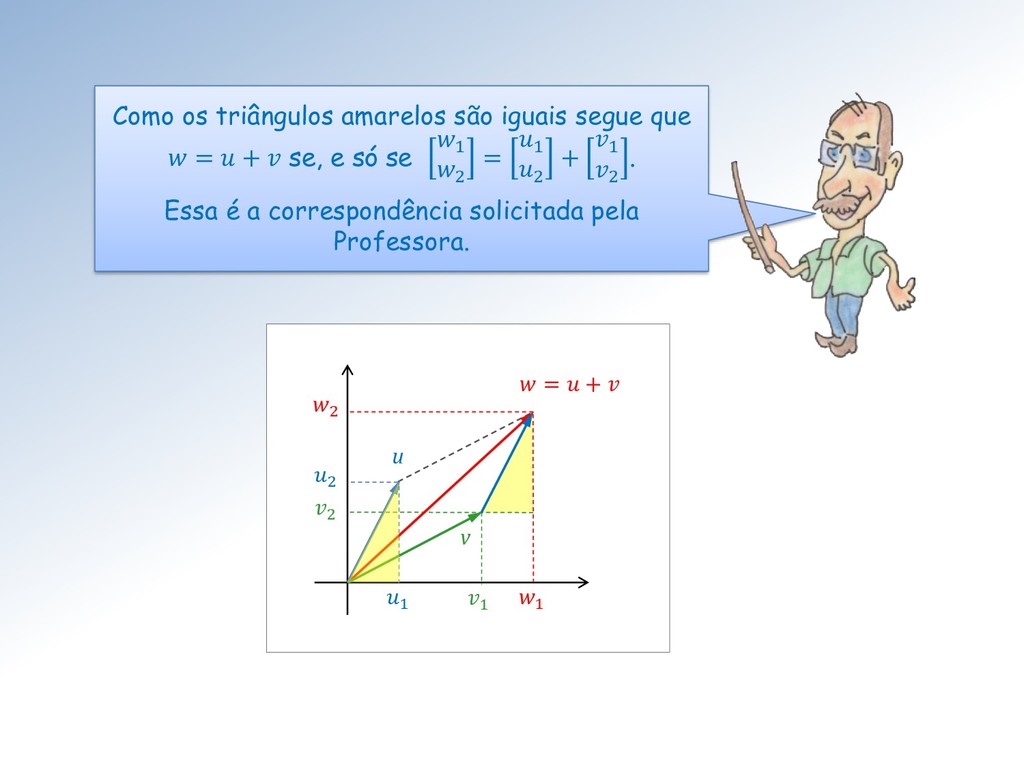
, soma dos vetores-livre u e v, é obtido pela regra do paralelogramo: Novamente, isto corresponde à adição de matrizes-coluna: Se = 1 2 e = 1 2 então + = 1 + 1 2 +2 .
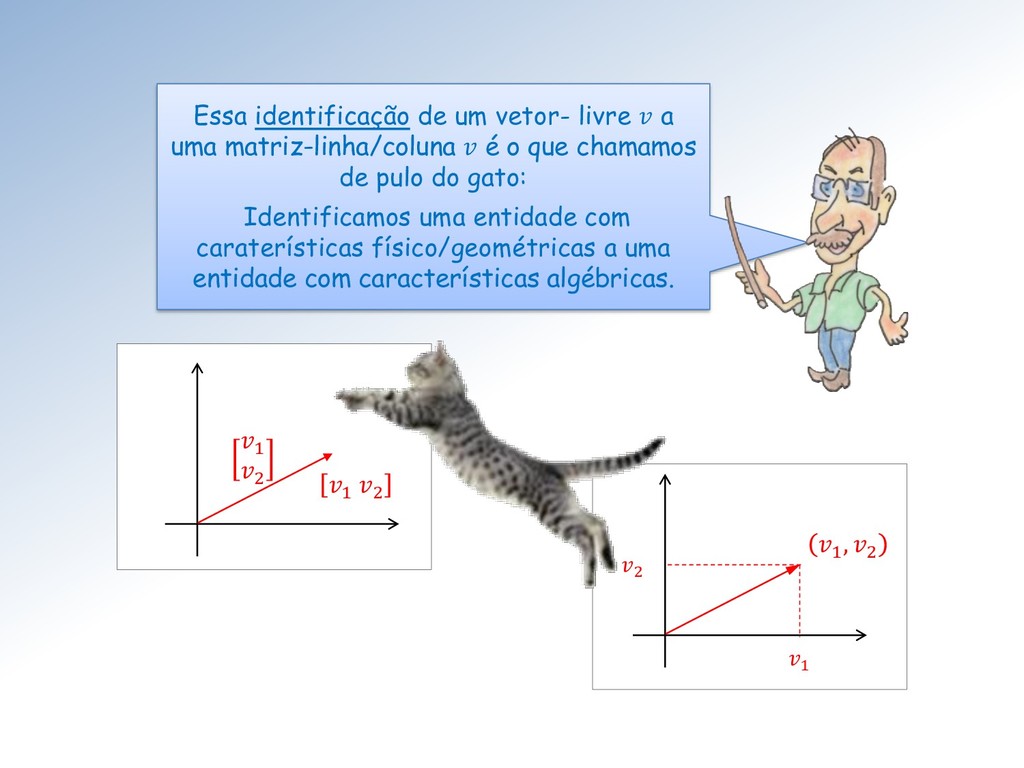
um vetor- livre a uma matriz-linha/coluna é o que chamamos de pulo do gato: Identificamos uma entidade com caraterísticas físico/geométricas a uma entidade com características algébricas. 1 2
vocês dois transportarão para matrizes-linha/coluna tudo o que percebemos com nossos sentidos. Matrizes-linha/coluna são do mundo das ideias. Já minha metade aristotélica acha ótimo estender a outros entes matemáticos nossa percepção euclidiana de distâncias e tamanhos, ângulos, a projeção de sombras...
entre: • A adição de vetores-livre em /ℛ via regra do paralelogramo. • E, a adição de matrizes-linha ou coluna em ℒ2 ou 2. E garantir também a correspondência entre: • A multiplicação de um vetor-livre em /ℛ por um fator de escala. • E, a multiplicação de uma matriz-coluna ou linha em 2 ou ℒ2 por um número real.
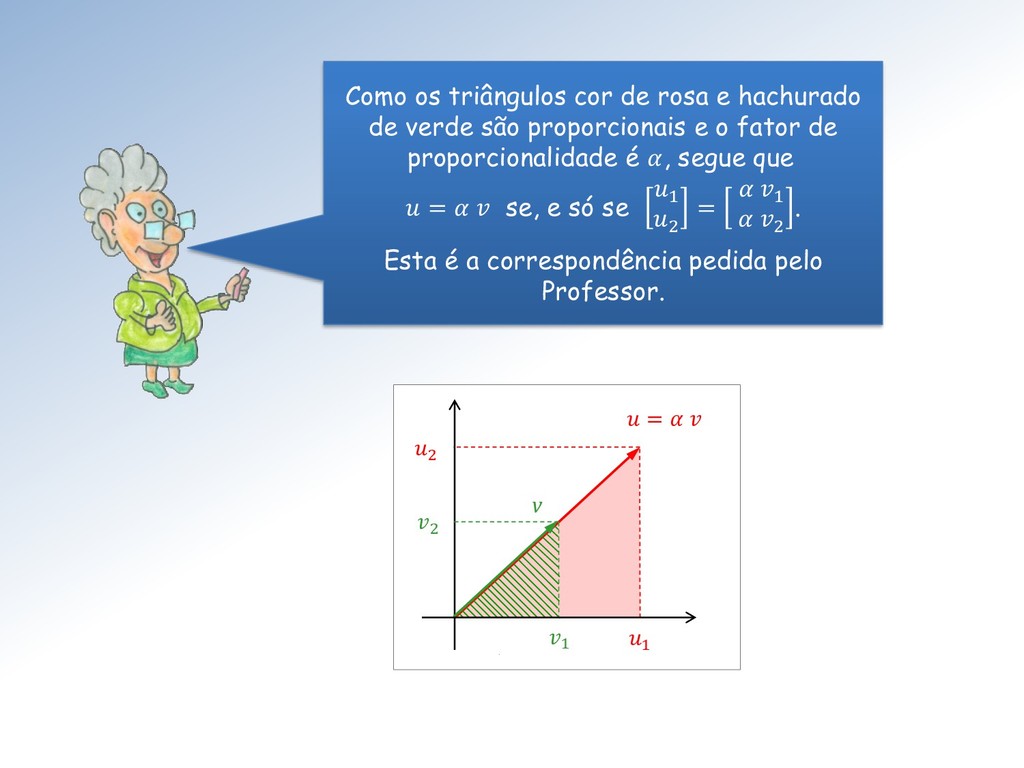
de rosa e hachurado de verde são proporcionais e o fator de proporcionalidade é , segue que = se, e só se 1 2 = 1 2 . Esta é a correspondência pedida pelo Professor.
(ou linha) preserva a correspondência entre as operações de adição e multiplicação por fator de escala. Identificações que preservam operações, como essa, são importantíssimas e recebem o nome de isomorfismos.
limitações! Um último detalhe: Os vetores-livres são entidades com características geométricas, por isso mesmo limitadas ao plano e ao espaço euclidianos.
coisa, a menos de adjetivos qualificativos. Por esse motivo passaremos a chamá-los apenas de vetores e usaremos, desabusadamente, o símbolo ℝ para representar o espaço deles.
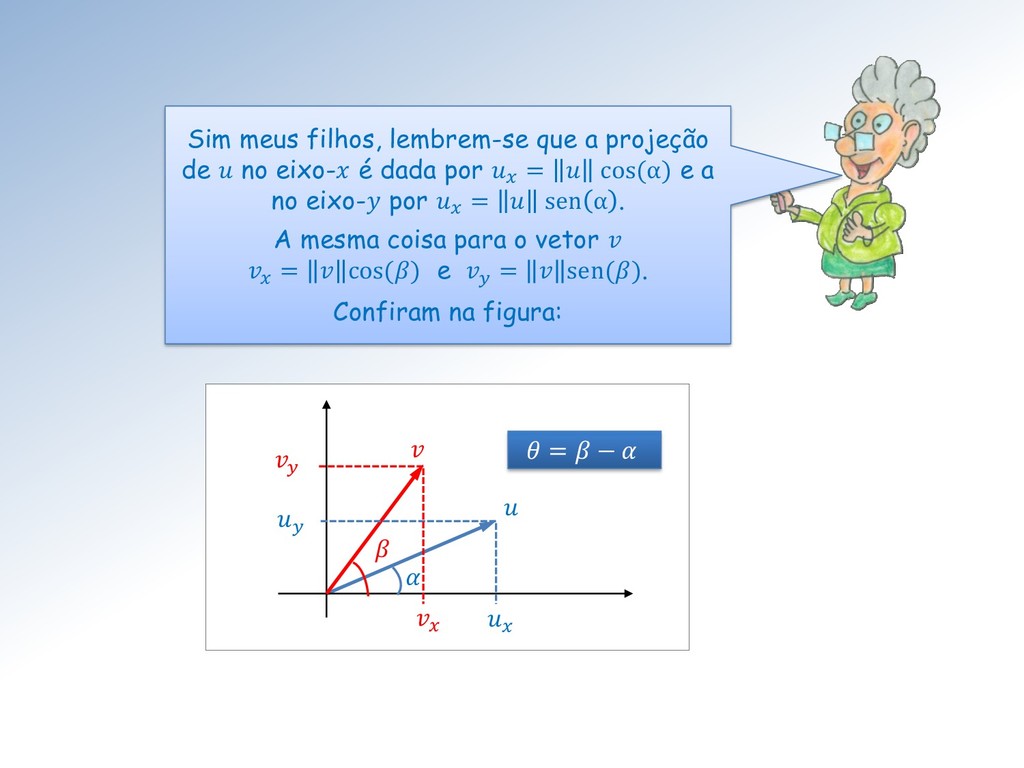
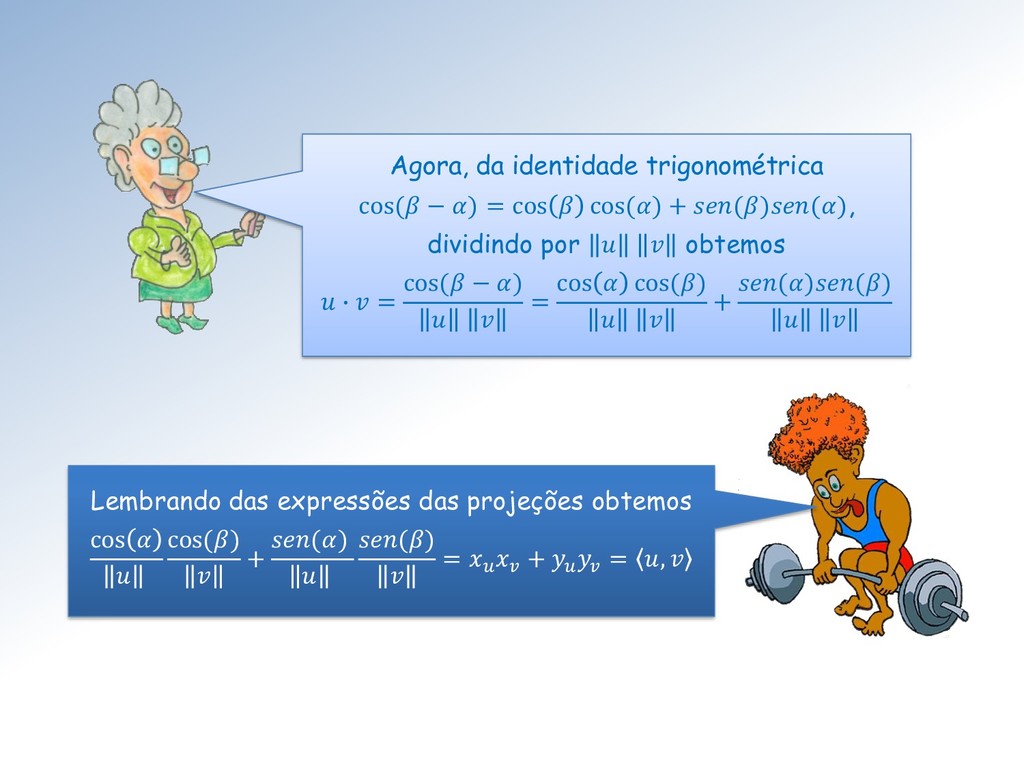
⋮ , é dado por = 1 2 + 2 2 + ⋯ + 2 . Mais adiante usaremos o termo norma para nos referirmos ao tamanho de um vetor ∈ ℝ. Usaremos também a notação para indicá-la, parecida com − o valor absoluto de um número real .
ℓ1 ℓ2 ⋮ ℓ e = 1 2 ⋮ é dado por ℓ, = ℓ1 1 + ℓ2 2 + ⋯ + ℓ . Mais adiante veremos que ele também é chamado de produto interno entre ℓ e . É claro que = , .
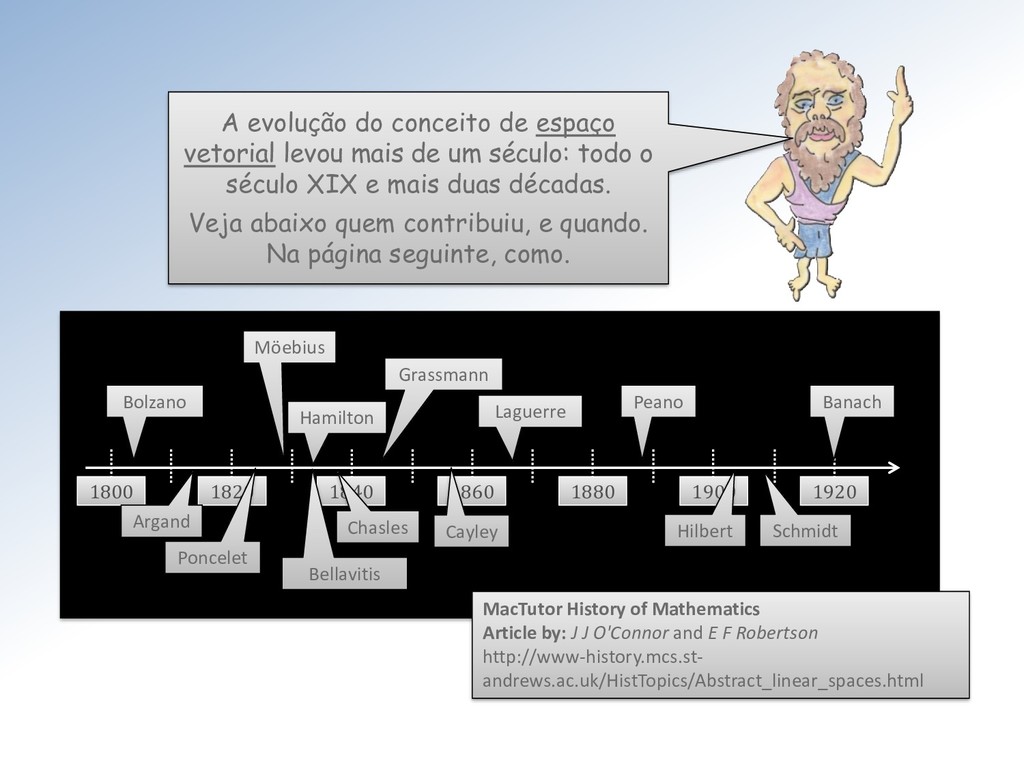
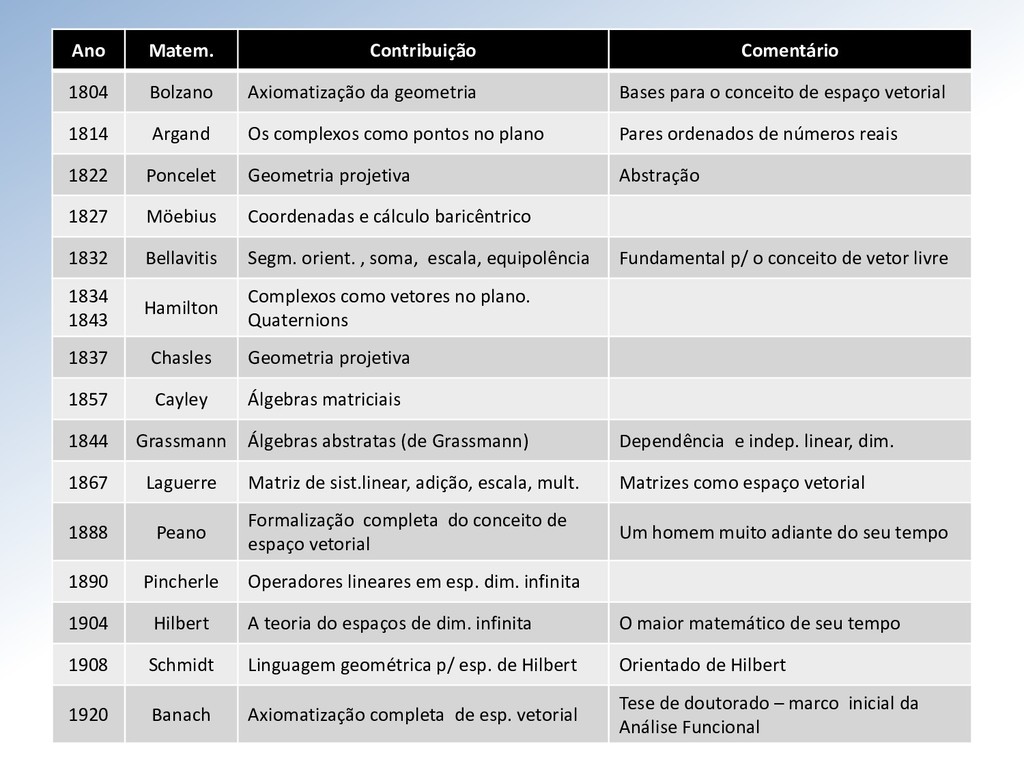
Möebius Grassmann Hilbert Peano Banach Schmidt Bellavitis Argand Cayley Laguerre Hamilton MacTutor History of Mathematics Article by: J J O'Connor and E F Robertson http://www-history.mcs.st- andrews.ac.uk/HistTopics/Abstract_linear_spaces.html A evolução do conceito de espaço vetorial levou mais de um século: todo o século XIX e mais duas décadas. Veja abaixo quem contribuiu, e quando. Na página seguinte, como.
para o conceito de espaço vetorial 1814 Argand Os complexos como pontos no plano Pares ordenados de números reais 1822 Poncelet Geometria projetiva Abstração 1827 Möebius Coordenadas e cálculo baricêntrico 1832 Bellavitis Segm. orient. , soma, escala, equipolência Fundamental p/ o conceito de vetor livre 1834 1843 Hamilton Complexos como vetores no plano. Quaternions 1837 Chasles Geometria projetiva 1857 Cayley Álgebras matriciais 1844 Grassmann Álgebras abstratas (de Grassmann) Dependência e indep. linear, dim. 1867 Laguerre Matriz de sist.linear, adição, escala, mult. Matrizes como espaço vetorial 1888 Peano Formalização completa do conceito de espaço vetorial Um homem muito adiante do seu tempo 1890 Pincherle Operadores lineares em esp. dim. infinita 1904 Hilbert A teoria do espaços de dim. infinita O maior matemático de seu tempo 1908 Schmidt Linguagem geométrica p/ esp. de Hilbert Orientado de Hilbert 1920 Banach Axiomatização completa de esp. vetorial Tese de doutorado – marco inicial da Análise Funcional
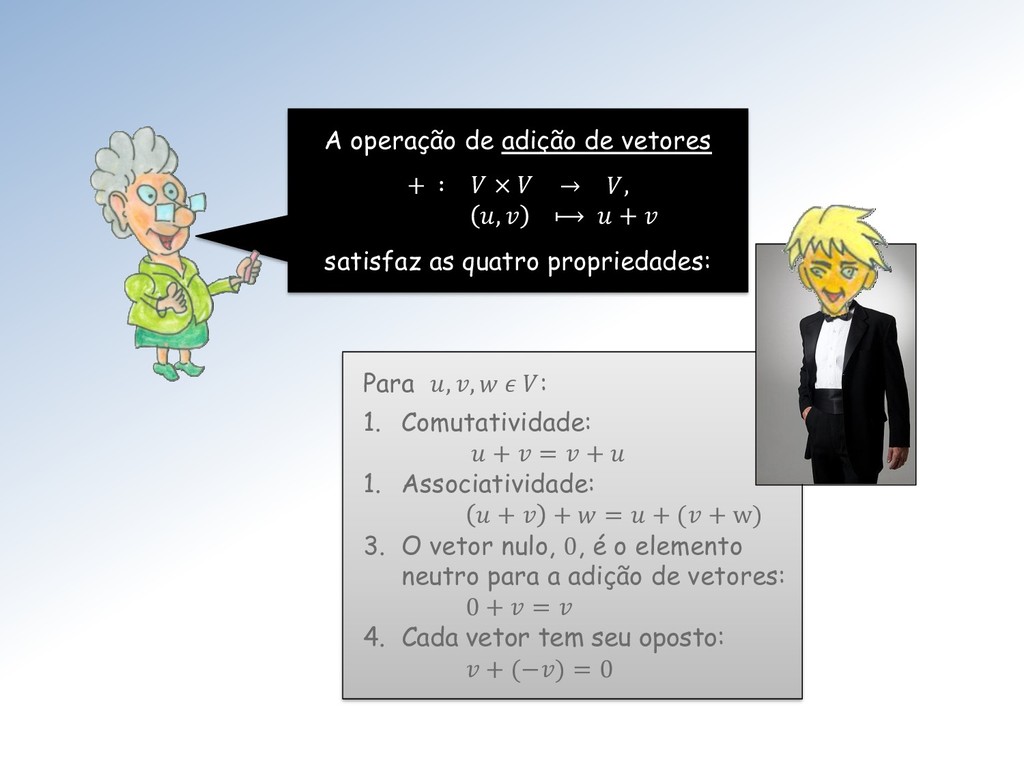
Associatividade: + + = + ( + w) 3. O vetor nulo, 0, é o elemento neutro para a adição de vetores: 0 + = 4. Cada vetor tem seu oposto: + (−) = 0 A operação de adição de vetores + ∶ × → , , ⟼ + satisfaz as quatro propriedades:
de espaços vetoriais. Repetindo, usaremos uma metalinguagem gráfica: • para a teoria abstrata de espaços vetoriais usaremos a preto e cinza. • para os exemplos, outras cores.
de ℝ (os que já definimos) satisfazem as oito propriedades enunciadas pela Mestra na definição de espaço vetorial. Portanto posso afirmar que os vetores de ℝ constituem um espaço vetorial.
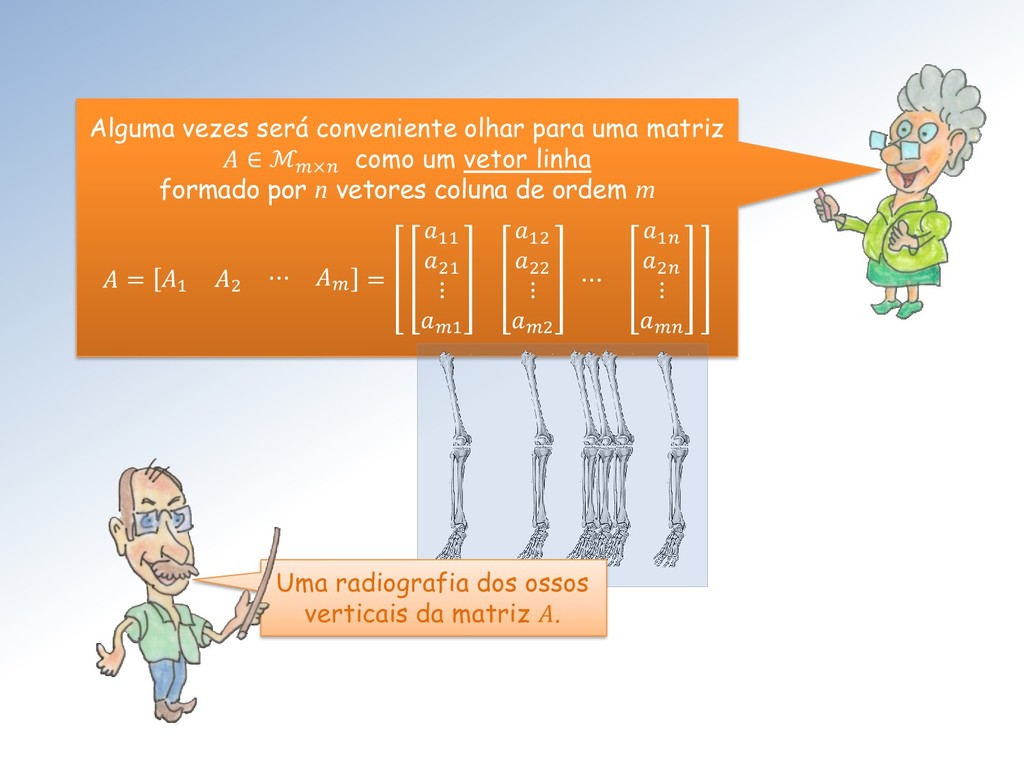
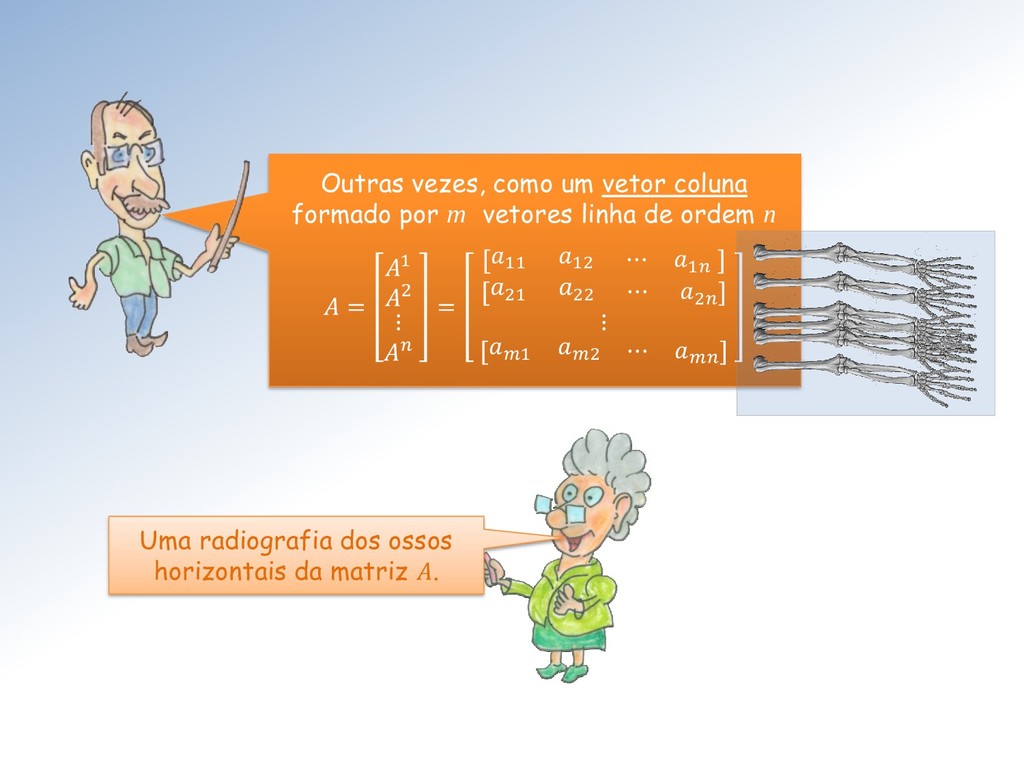
linhas e n colunas. Como abaixo. Para resumir tudo isso, escrevemos = [ ]. Cada é um número real, posicionado no cruzamento da linha i com a coluna j. Sim, lembro-me lá do 2º grau: = 11 12 21 22 ⋯ 1 2 ⋮ ⋱ ⋮ 1 2 ⋯ m linhas n colunas
números reais. Só falta verificar que elas satisfazem as oito propriedades. De acordo com a definição abstrata, vetores são “apenas” entidades abstratas (objetos, coisas, ...) que podem ser somadas e escaladas. E precisam cumprir as oito propriedades listadas na definição.
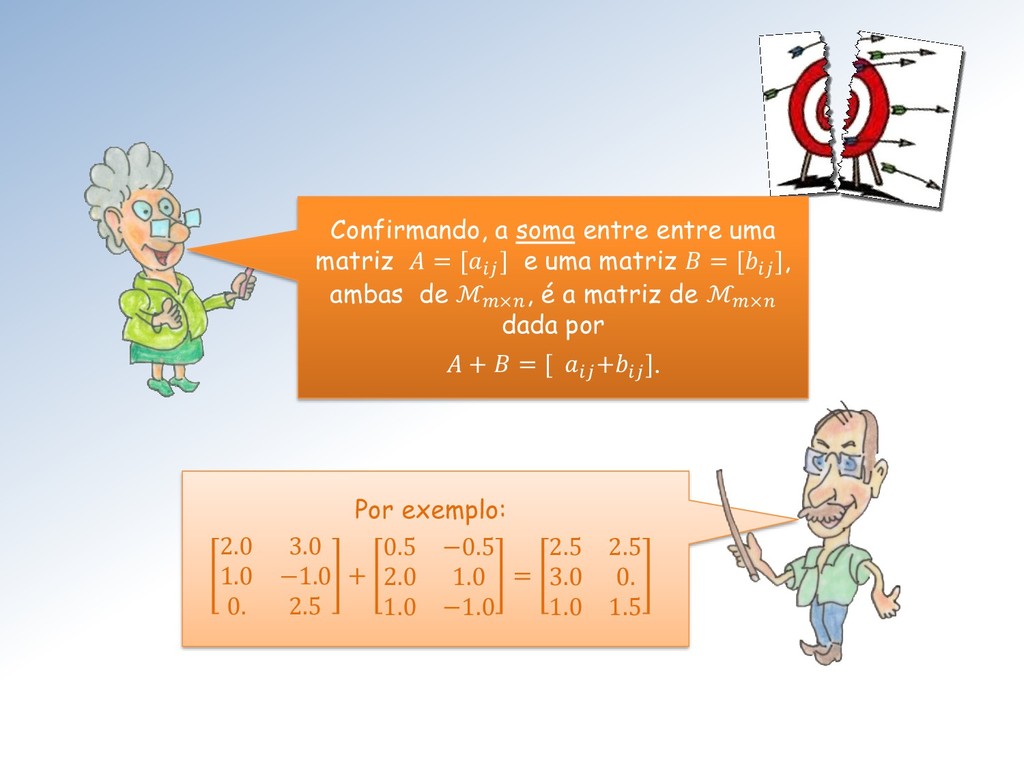
−0.5 2.0 1.0 1.0 −1.0 = 2.5 2.5 3.0 0. 1.0 1.5 Confirmando, a soma entre entre uma matriz = [ ] e uma matriz = [ ], ambas de ℳ× , é a matriz de ℳ× dada por + = [ + ].
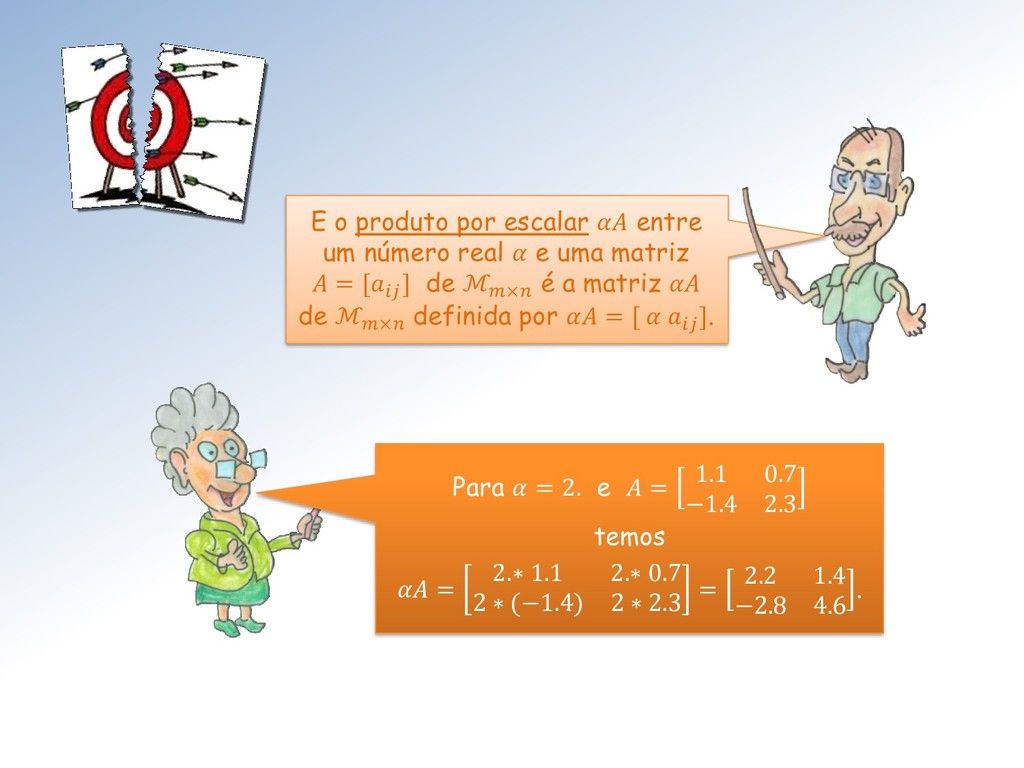
= 2.∗ 1.1 2.∗ 0.7 2 ∗ (−1.4) 2 ∗ 2.3 = 2.2 1.4 −2.8 4.6 . E o produto por escalar entre um número real e uma matriz = [ ] de ℳ× é a matriz de ℳ× definida por = [ ].
com matrizes de ℳ× e números reais satisfazem as oito regras da definição de espaço vetorial. Surfista, sobrou para você! Confira a afirmação do Sherlock.
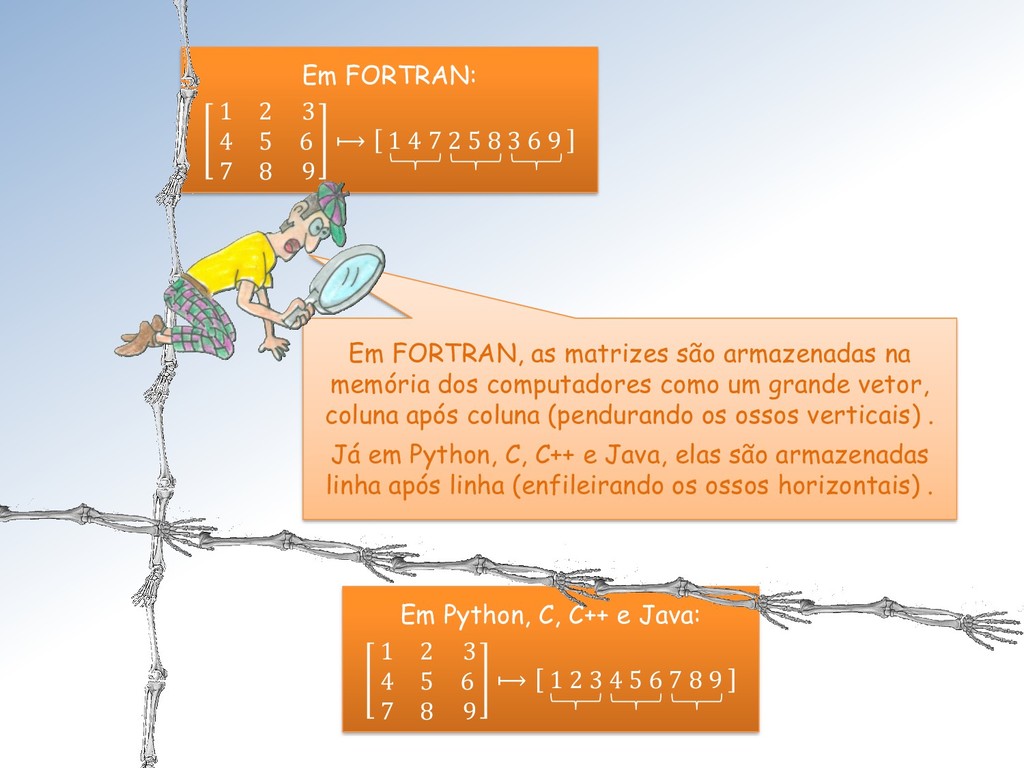
9 ⟼ 1 4 7 2 5 8 3 6 9 Em Python, C, C++ e Java: 1 2 3 4 5 6 7 8 9 ⟼ 1 2 3 4 5 6 7 8 9 Em FORTRAN, as matrizes são armazenadas na memória dos computadores como um grande vetor, coluna após coluna (pendurando os ossos verticais) . Já em Python, C, C++ e Java, elas são armazenadas linha após linha (enfileirando os ossos horizontais) .
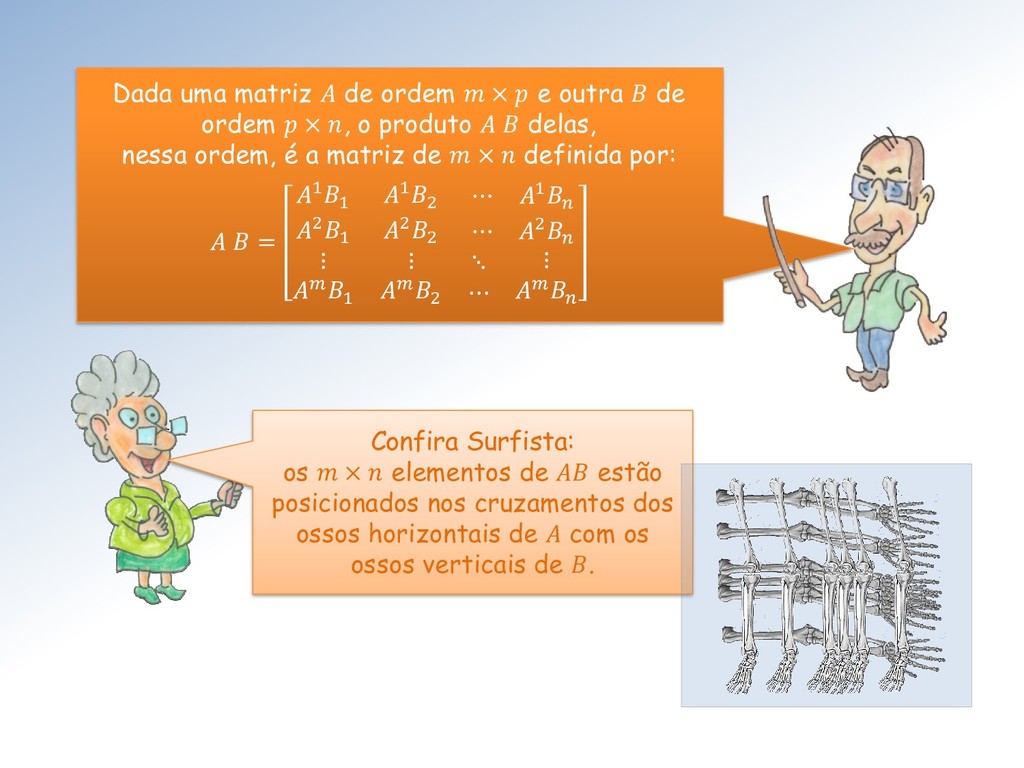
× , o produto delas, nessa ordem, é a matriz de × definida por: = 11 12 ⋯ 1 21 22 ⋯ 2 ⋮ 1 ⋮ 2 ⋱ ⋯ ⋮ Confira Surfista: os × elementos de estão posicionados nos cruzamentos dos ossos horizontais de com os ossos verticais de .
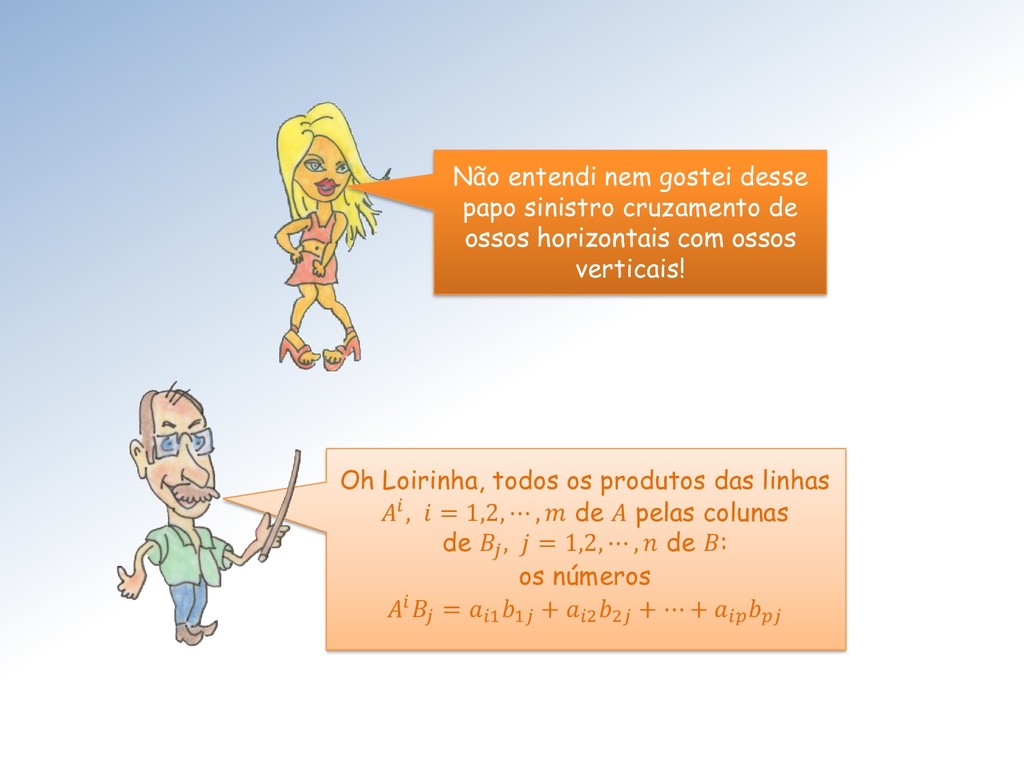
horizontais com ossos verticais! Oh Loirinha, todos os produtos das linhas , = 1,2, ⋯ , de pelas colunas de , = 1,2, ⋯ , de : os números = 1 1 + 2 2 + ⋯ +
posição da matriz produto. Uma caveira no cruzamento de cada osso horizontal com vertical. Kkkk! Piada detestável Surfista. Até parece um coveiro de cemitério!
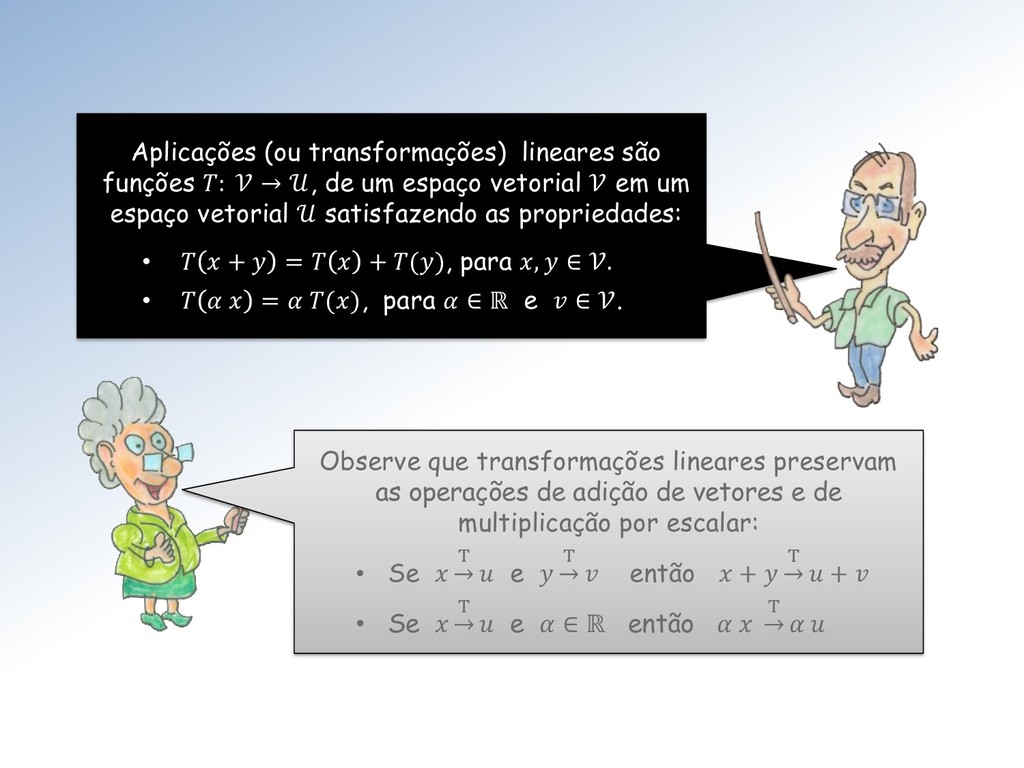
um espaço vetorial em um espaço vetorial satisfazendo as propriedades: • + = + (), para , ∈ . • = (), para ∈ ℝ e ∈ . Observe que transformações lineares preservam as operações de adição de vetores e de multiplicação por escalar: • Se → T e → T então + → T + • Se → T e ∈ ℝ então → T
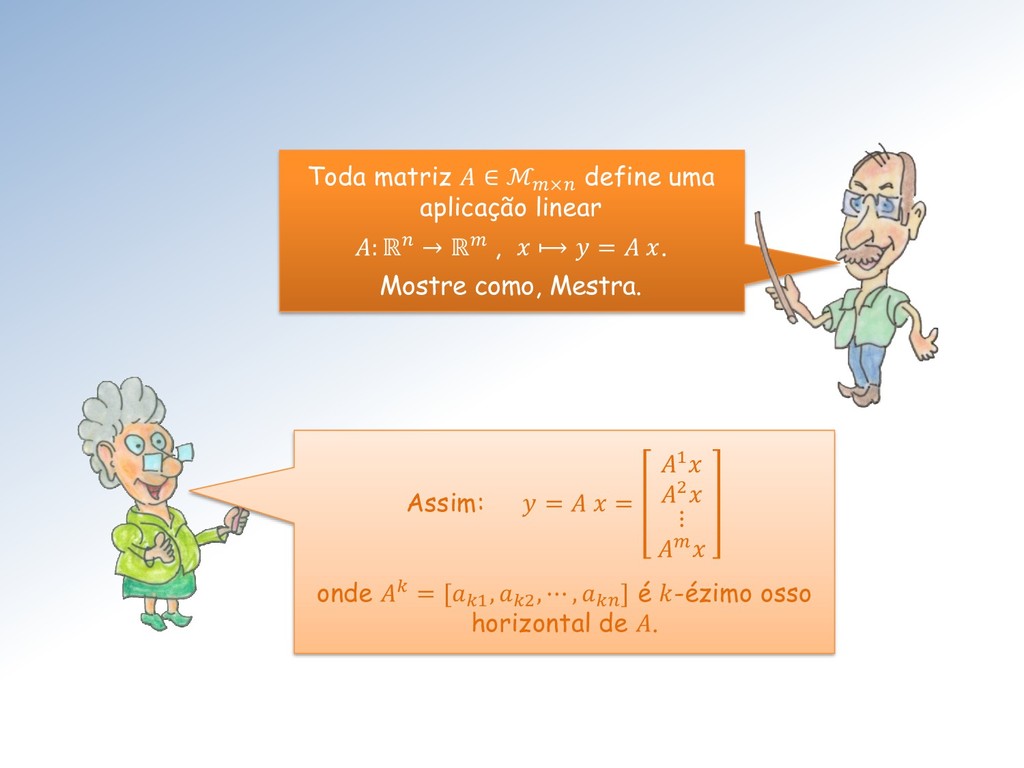
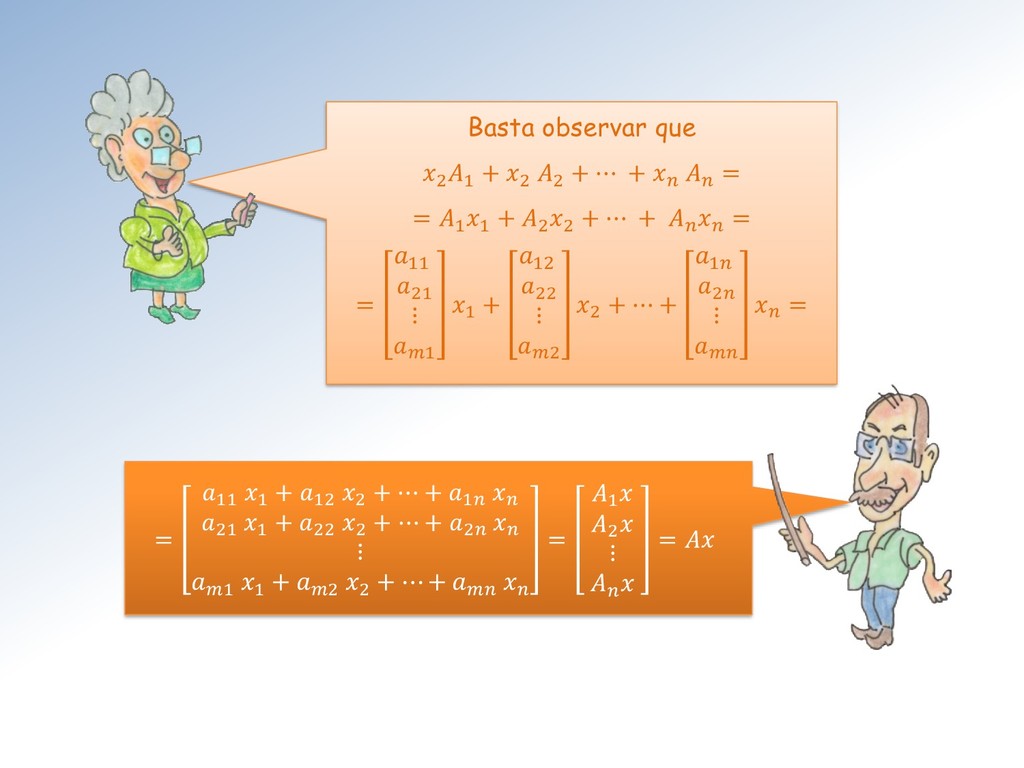
vetor de ℝ. Podemos entender o vetor produto = como uma combinação linear das colunas de . Sim, é só pensar na radiografia dos ossos verticais de : = 1 1 + 2 2 + ⋯ + .
são denominados coordenadas de relativas aos 1 , 2 , ⋯ , Seja um espaço vetorial. O termo usado para expressões do tipo = 1 1 + 2 2 + ⋯ + onde 1 , 2 , ⋯ , ∈ e 1 , 2 , ⋯ , ∈ ℝ é combinação linear.
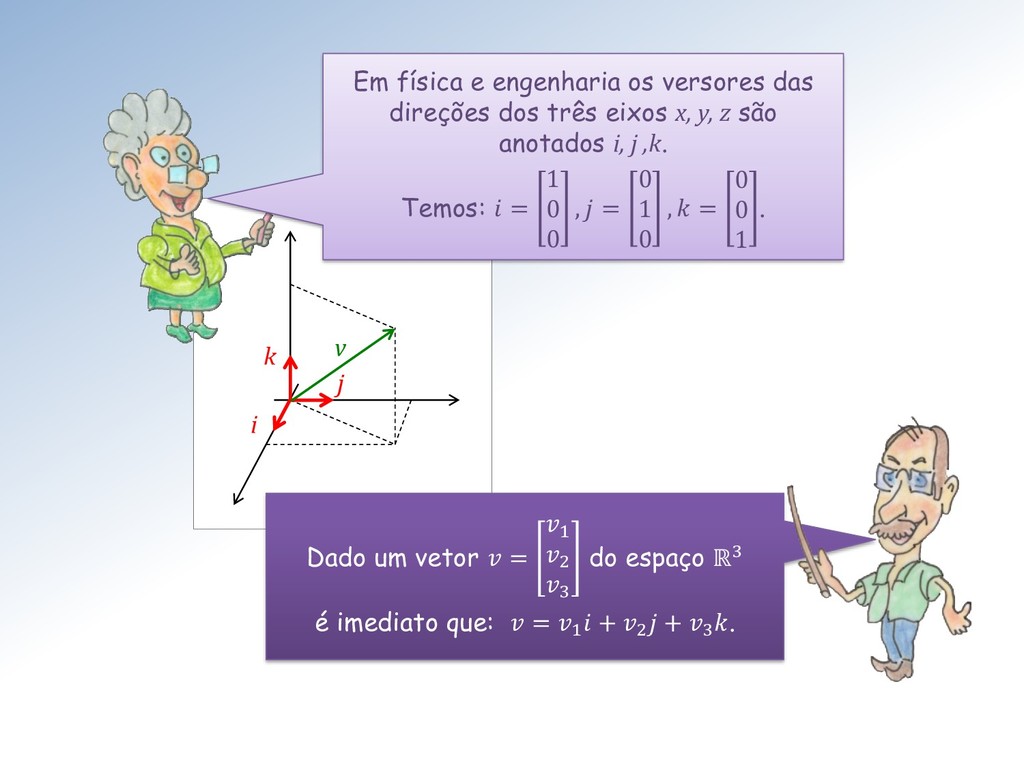
o vetor e definido por Τ = é unitário. Ele é dito versor associado a . Lembrem-se: Se, p/ex., = então = 2 + 2. Versores são ferramentas para estabelecer direção, sentido de percurso e unidade de medida (o tamanho da unidade).
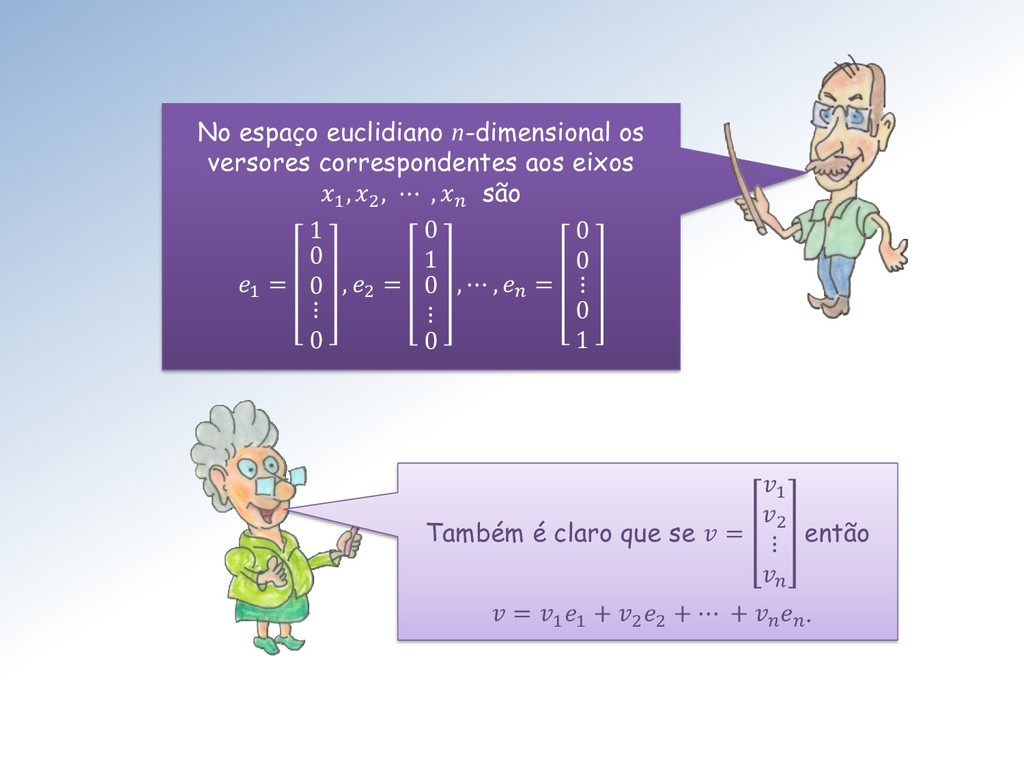
das direções dos três eixos x, y, z são anotados i, j ,k. Temos: = 1 0 0 , = 0 1 0 , = 0 0 1 . Dado um vetor = 1 2 3 do espaço ℝ3 é imediato que: = 1 + 2 + 3 .
Seja um espaço vetorial. O conjunto de todas as combinações lineares geradas por vetores 1 , 2 , ⋯ , ∈ é denominado subespaço gerado por eles. É usual anotá-lo 1 , 2 , ⋯ , .
dito linearmente independente (LI) quando, e apenas quando valer a implicação 1 1 + 2 2 + ⋯ + = 0 ⟹ 1 = 2 = ⋯ = = 0. Caso contrário é linearmente dependente (LD). A justificativa para o termo é simples: Se, por exemplo, 1 ≠ 0 em 1 1 + 2 2 + ⋯ + = 0 então podemos dividir essa expressão por 1 , obtendo 1 = (− Τ 2 1 ) 2 + ⋯ + (− Τ 1 ) .
⋯ , é uma base de um espaço vetorial quando: 1. Gera , isto é, todo ∈ se escreve como combinação linear de vetores de β, 2. β é LI. Para todo espaço vetorial temos apenas duas possibilidades: 1ª - Ou toda base possui um mesmo número máximo de vetores 2ª - Ou não.
caso finito: • Se acrescentarmos um vetor à ela deixará de ser LI. • Se excluirmos um vetor de ela deixará de gerar . 2. No outro caso: • Acrescentando um vetor à ela continuará LI (esta é a propriedade que define os naturais ℕ). • Não há como gerar de outra forma (sem acrescentar mais vetores).
lineares são somas envolvendo apenas um número finito de vetores, sempre ! Assim para qualquer vetor ∈ , existe um subconjunto finito de vetores ⊂ 1 , 2 , ⋯ , , ⋯ e = ∈
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}