Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Analysis of the Foot Placement Estimator
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Safwan Choudhury
April 14, 2012
Research
230
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Analysis of the Foot Placement Estimator
Safwan Choudhury
April 14, 2012
More Decks by Safwan Choudhury
See All by Safwan Choudhury
Design and Gait Synthesis for a 3D Lower Body Humanoid
safwanc
1
79
ECE 486 Lecture
safwanc
0
350
Controlling Wheelchair Motion with Electroencephalography
safwanc
3
190
Accurate Determination of Joint Angles from Inertial Measurement Unit Data
safwanc
0
190
Gait Controller for 3D Active Dynamic Walking
safwanc
0
170
Bipedal Locomotion
safwanc
2
74
Learning Thought-Based Motor Control using Gaussian Processes
safwanc
0
140
Electromechanical Design
safwanc
0
160
Other Decks in Research
See All in Research
[BlackHatAsia2026] Hidden Telemetry: Uncovering TraceLogging ETW Providers You're Not Using (Yet)
asuna_jp
1
540
通時的な類似度行列に基づく単語の意味変化の分析
rudorudo11
0
320
SOTAのさらに先へ:厳しい推論制約下での高性能モデルのPost-Training
analokmaus
0
1.3k
機械学習で作った ポケモン対戦bot で 遊ぼう!
fufufukakaka
0
320
英語教育 “研究” のあり方:学術知とアウトリーチの緊張関係
terasawat
1
1k
量子コンピュータの紹介
oqtopus
0
340
Harness Engineering and Al Agent
kzinmr
3
1.7k
「AIとWhyを深堀る」をAIと深堀る
iflection
0
500
Any-Optical-Model: A Universal Foundation Model for Optical Remote Sensing
satai
3
850
Model Discovery and Graph Simulation: A Lightweight Gateway to Chaos Engineering
anatolykr
0
210
はじまりの クエスチョンブック —余暇と豊かさにあふれた社会とは?
culturaltransition
PRO
0
520
第66回コンピュータビジョン勉強会@関東 Epona: Autoregressive Diffusion World Model for Autonomous Driving
kentosasaki
0
640
Featured
See All Featured
エンジニアに許された特別な時間の終わり
watany
107
250k
Design and Strategy: How to Deal with People Who Don’t "Get" Design
morganepeng
133
19k
Impact Scores and Hybrid Strategies: The future of link building
tamaranovitovic
0
310
Art, The Web, and Tiny UX
lynnandtonic
304
22k
How to Create Impact in a Changing Tech Landscape [PerfNow 2023]
tammyeverts
55
3.4k
First, design no harm
axbom
PRO
2
1.2k
世界の人気アプリ100個を分析して見えたペイウォール設計の心得
akihiro_kokubo
PRO
72
40k
Tell your own story through comics
letsgokoyo
1
960
Automating Front-end Workflow
addyosmani
1370
210k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
3.5k
Believing is Seeing
oripsolob
1
150
What Being in a Rock Band Can Teach Us About Real World SEO
427marketing
0
1k
Transcript
Foot Placement Estimator A Dynamic Measure of Balance for Bipedal
Robots ECE 688: Course Project Safwan Choudhury
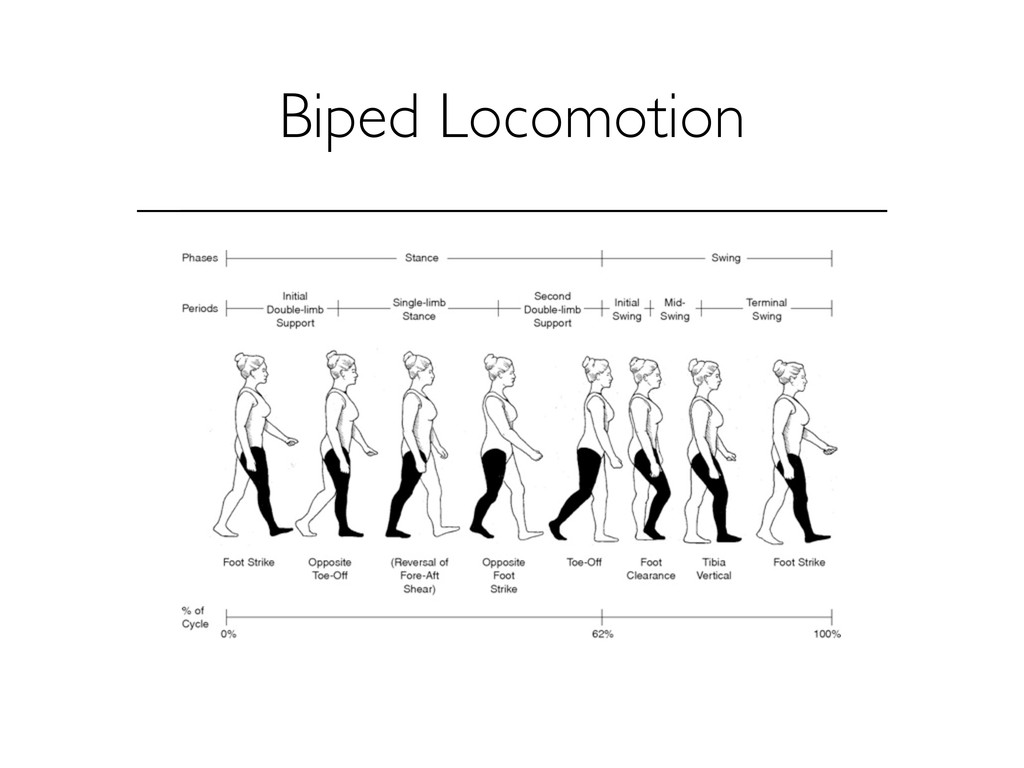
Biped Locomotion
Motivations ★ Navigating Human Environments ★ Space Exploration / Military
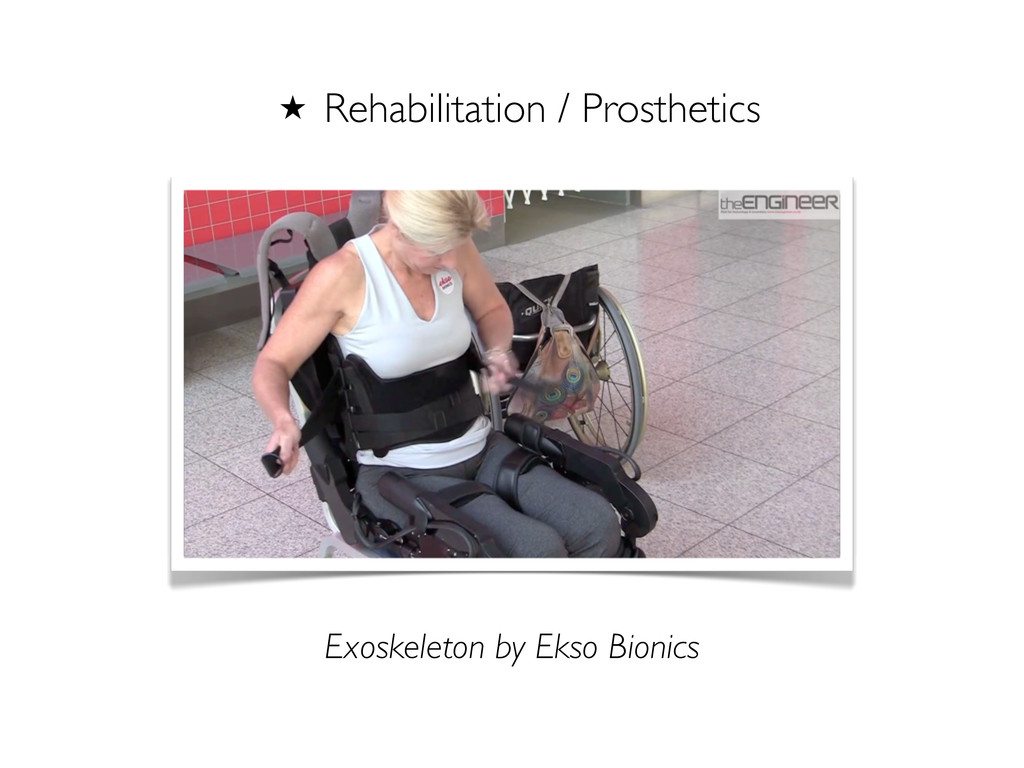
Applications ★ Rehabilitation / Prosthetics
2011 Honda ASIMO at FIRST Robotics ★ Navigating Human Environments
2011 Honda ASIMO at FIRST Robotics ★ Navigating Human Environments
NASA’s Robonaut for International Space Station (ISS) ★ Space Exploration
/ Military Applications
Exoskeleton by Ekso Bionics ★ Rehabilitation / Prosthetics
Exoskeleton by Ekso Bionics ★ Rehabilitation / Prosthetics
Achieve stable and energetically efficient walking control strategies for bipedal
robots which mimic human-like gait
Walking Control Strategies ★ Zero-Moment Point ★ Passive Dynamics ★
Biologically Inspired Techniques ★ Central Pattern Generators ★ Neural Networks ★ Zero-Hybrid Dynamics
Zero-Moment Point
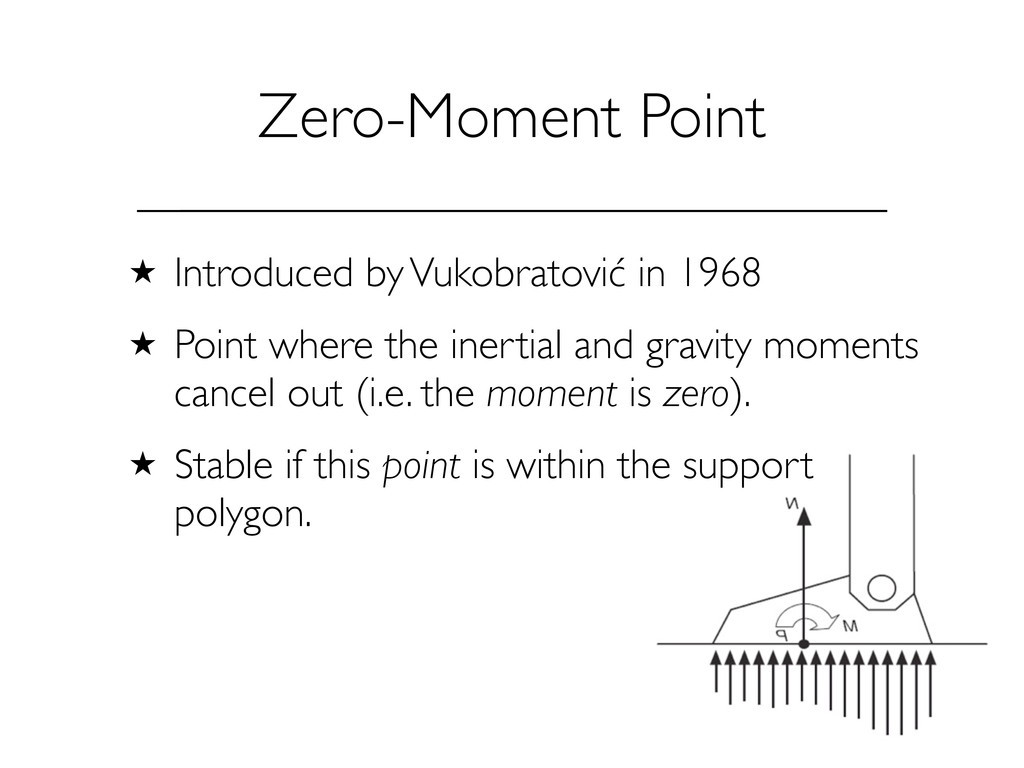
Zero-Moment Point ★ Introduced by Vukobratović in 1968 ★ Point
where the inertial and gravity moments cancel out (i.e. the moment is zero). ★ Stable if this point is within the support polygon.
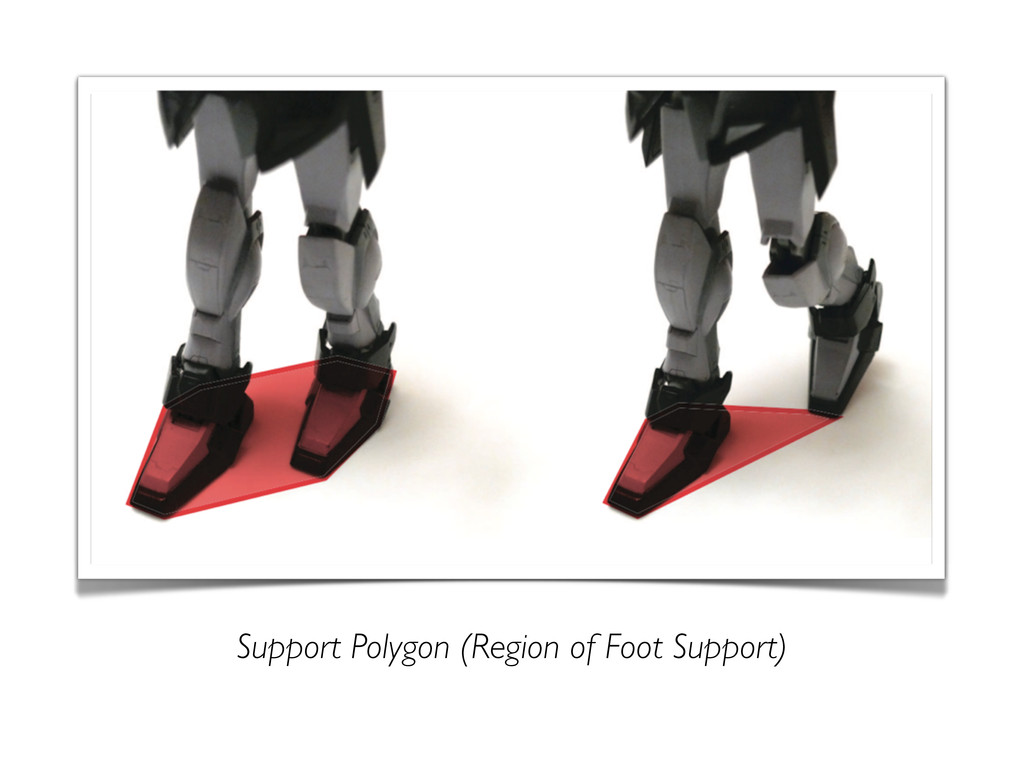
Support Polygon (Region of Foot Support)
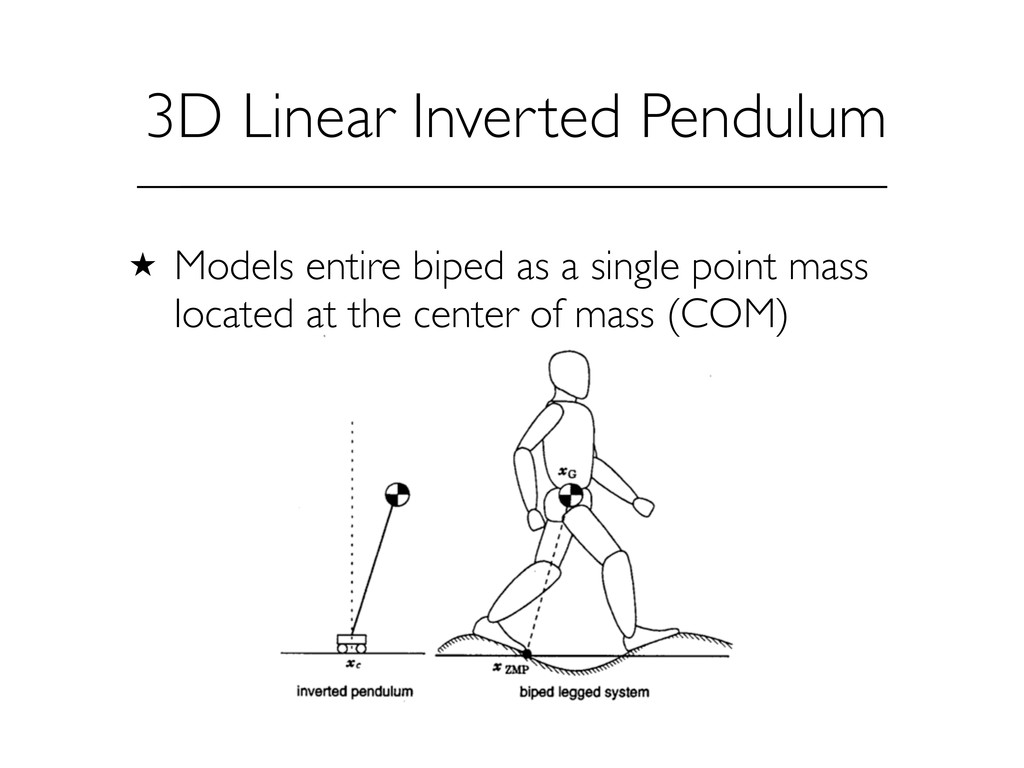
3D Linear Inverted Pendulum ★ Models entire biped as a
single point mass located at the center of mass (COM)
Remarks on ZMP ★ Popular but energetically inefficient ★ Statically
stable walking only ★ Very “robotic” (not human-like gait)
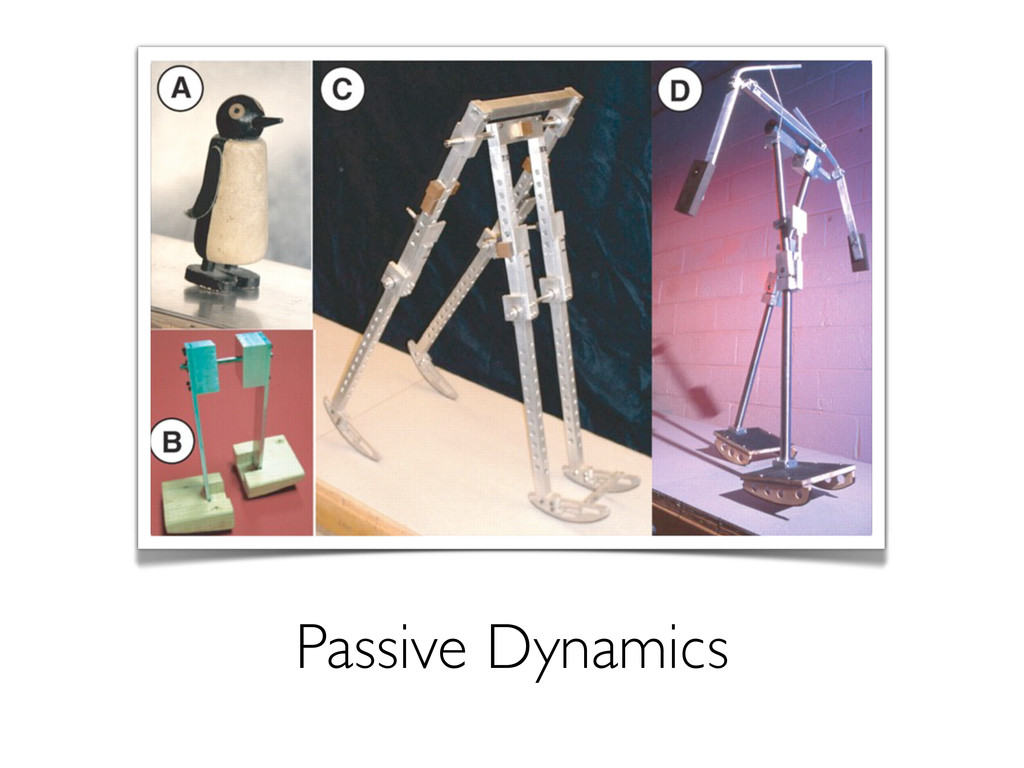
Passive Dynamics
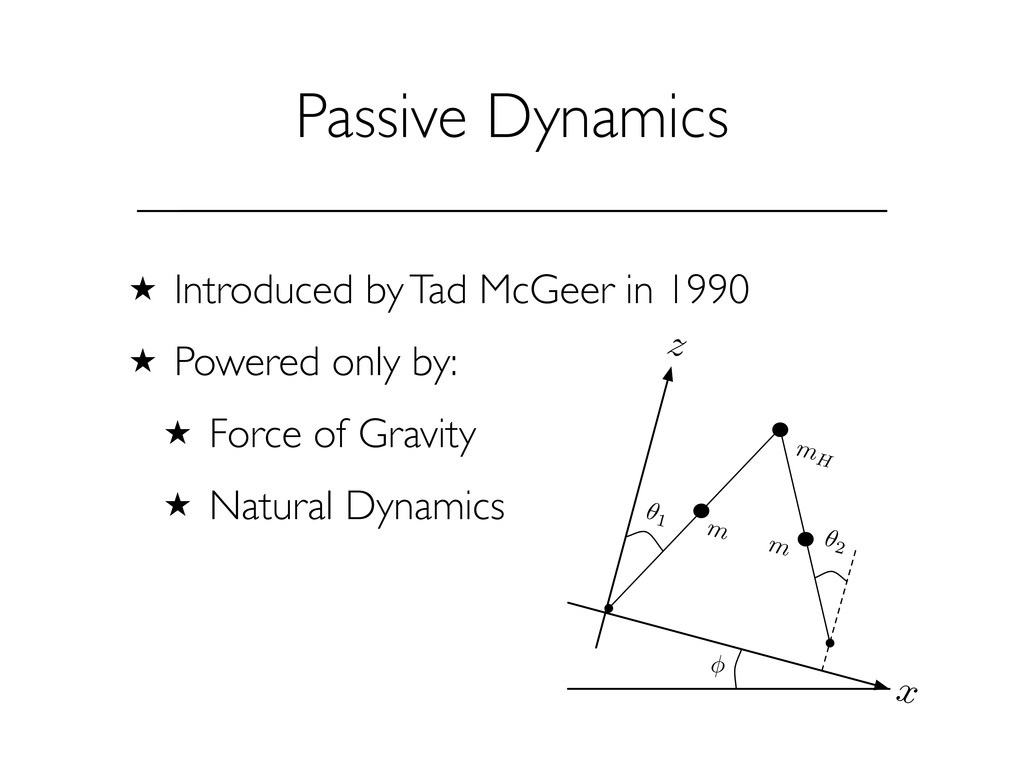
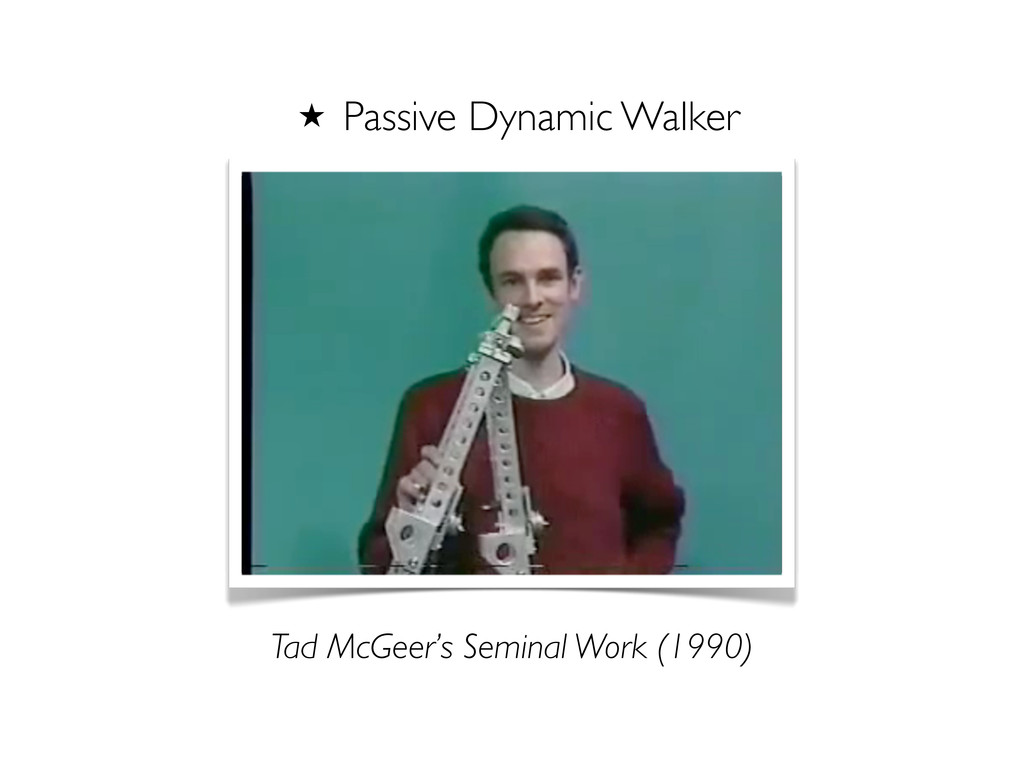
Passive Dynamics ★ Introduced by Tad McGeer in 1990 ★
Powered only by: ★ Force of Gravity ★ Natural Dynamics θ1 θ2 m m mH x z φ
Tad McGeer’s Seminal Work (1990) ★ Passive Dynamic Walker
Tad McGeer’s Seminal Work (1990) ★ Passive Dynamic Walker
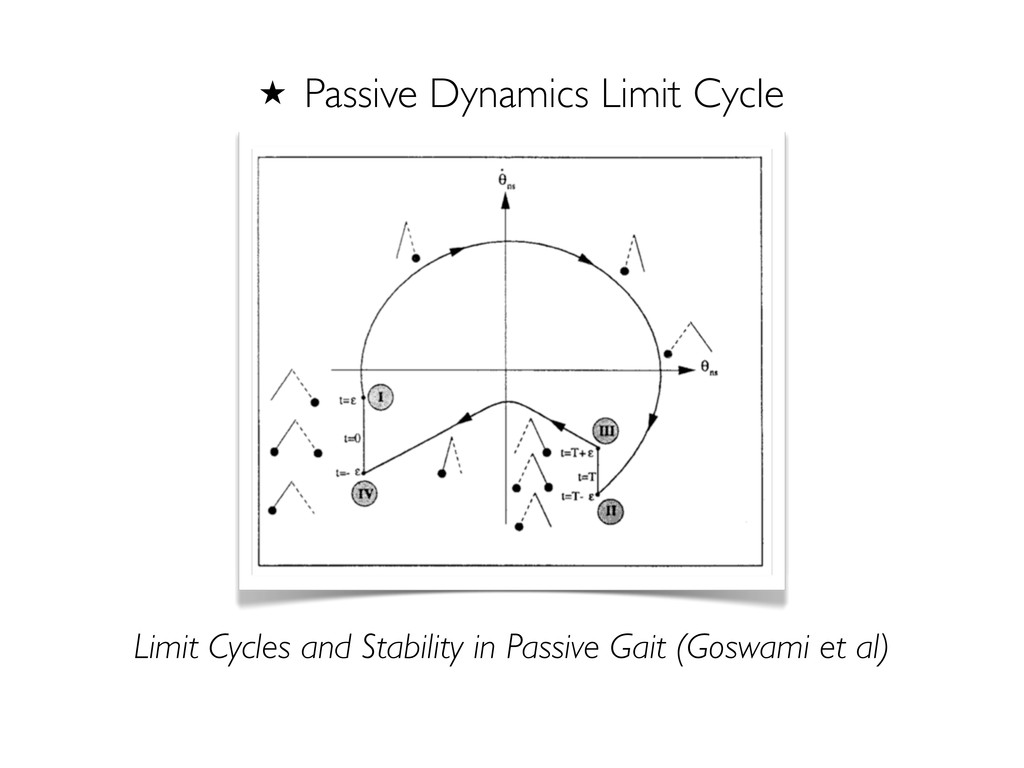
Limit Cycles and Stability in Passive Gait (Goswami et al)
★ Passive Dynamics Limit Cycle
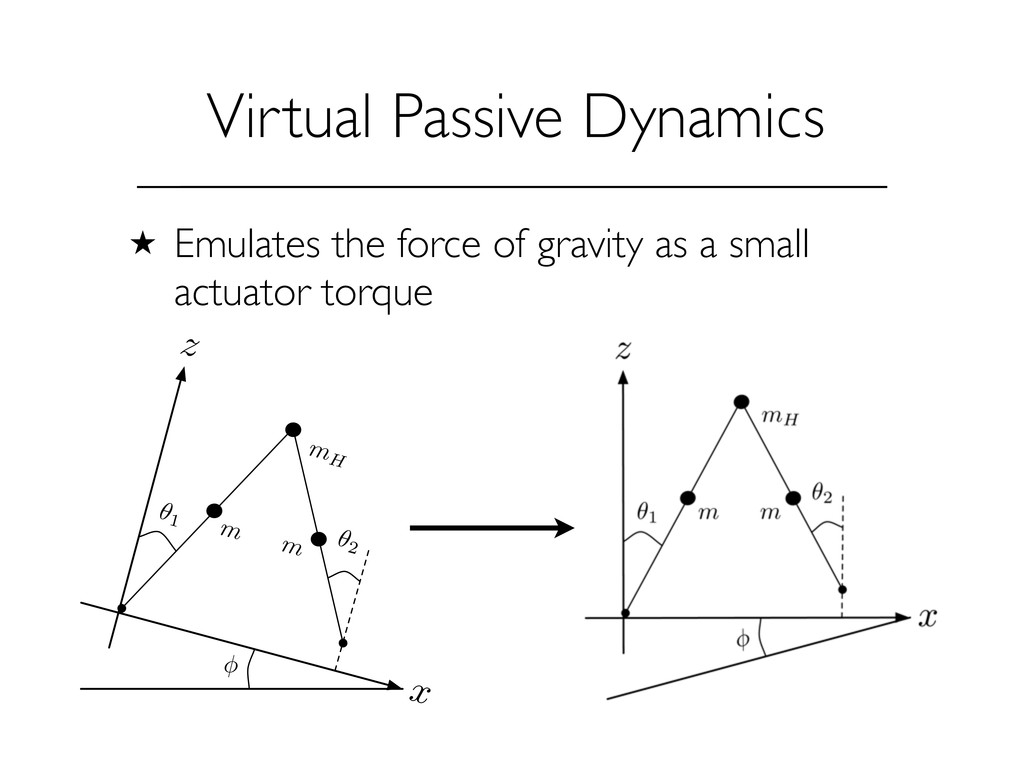
Virtual Passive Dynamics ★ Emulates the force of gravity as
a small actuator torque θ1 θ2 m m mH x z φ
Remarks on Passive Dynamics ★ Highly energetically efficient ★ Not
robust (even small perturbations) ★ Very specific initial conditions
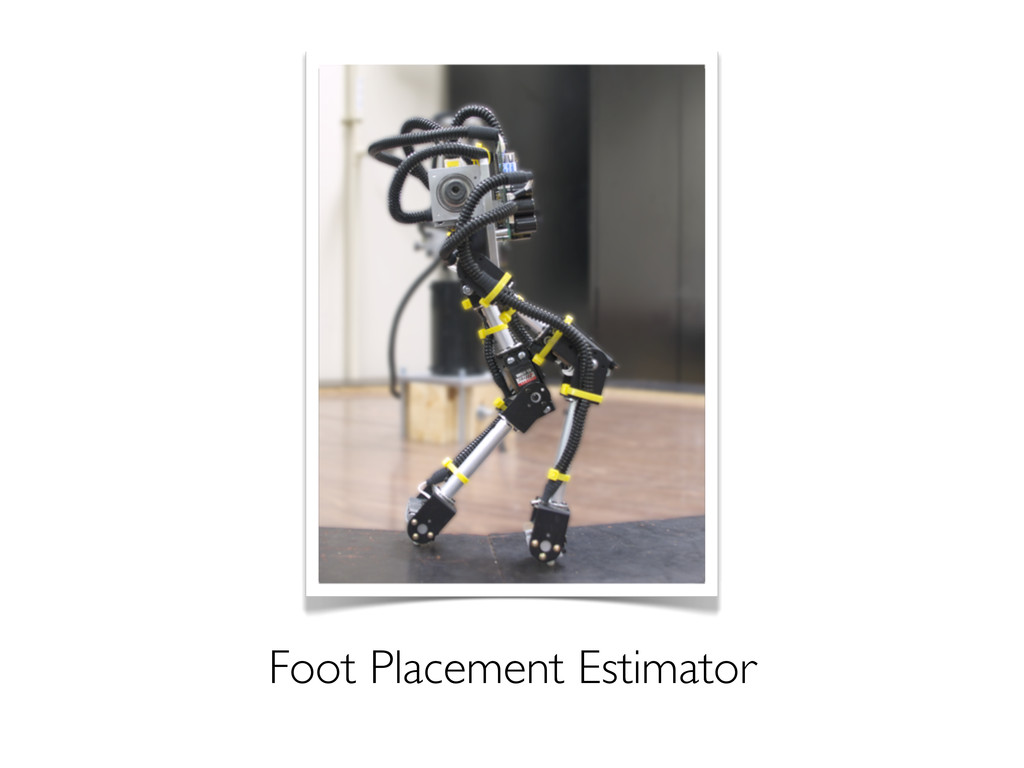
Foot Placement Estimator
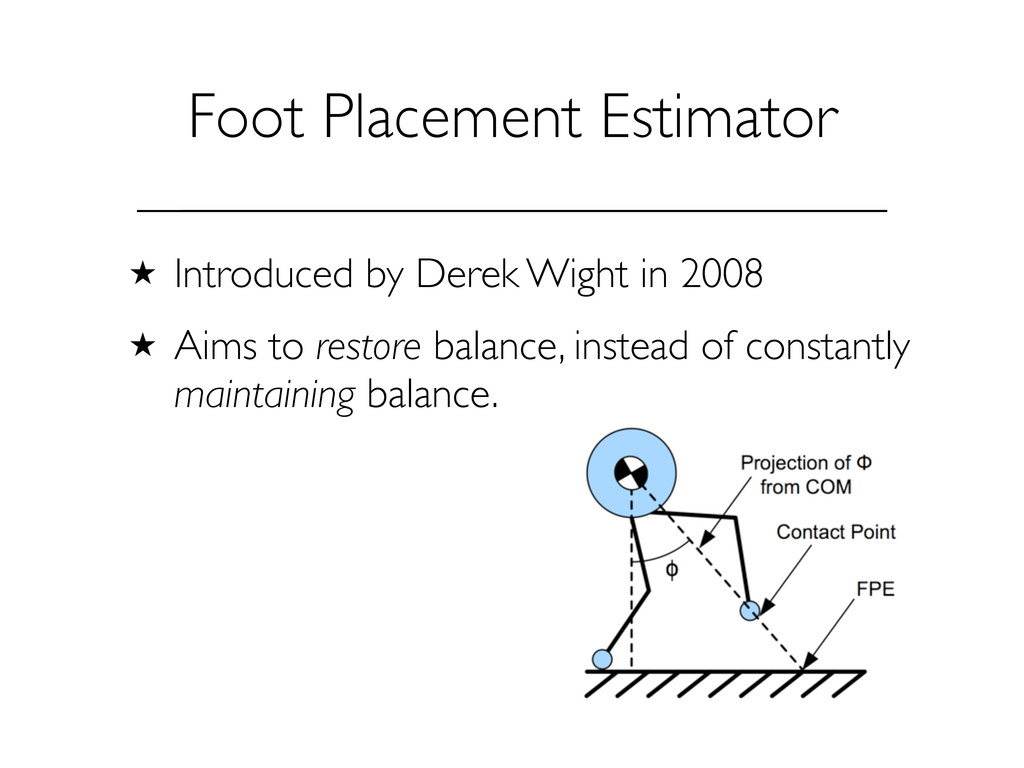
Foot Placement Estimator ★ Introduced by Derek Wight in 2008
★ Aims to restore balance, instead of constantly maintaining balance.
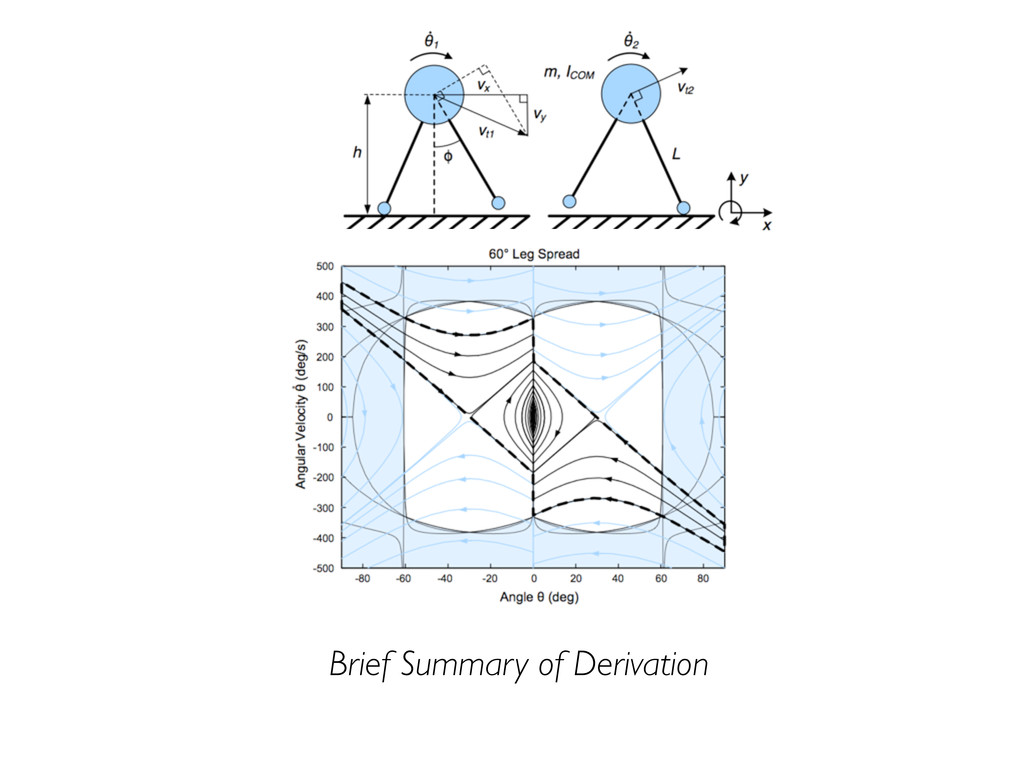
Brief Summary of Derivation
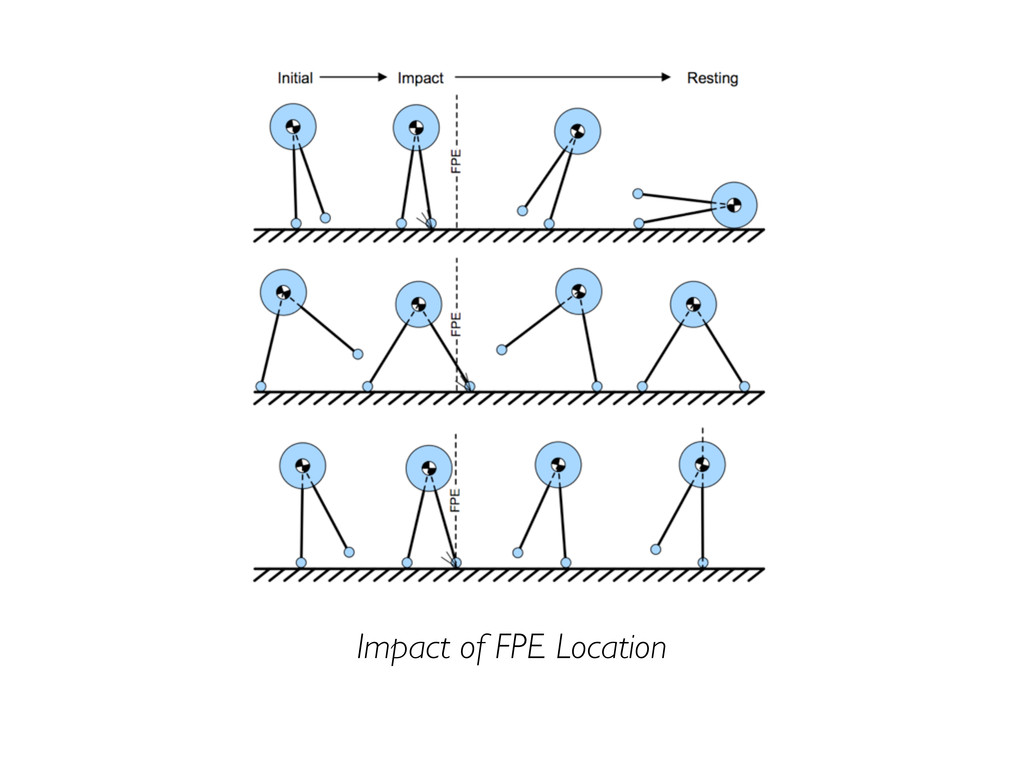
Impact of FPE Location
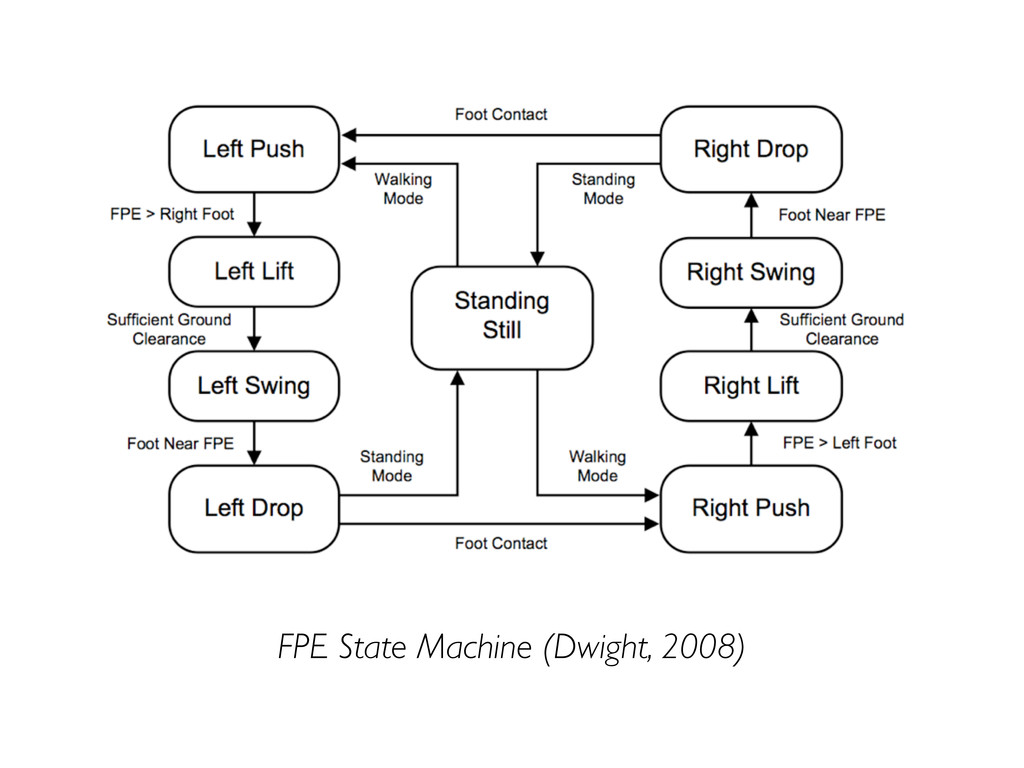
FPE State Machine (Dwight, 2008)
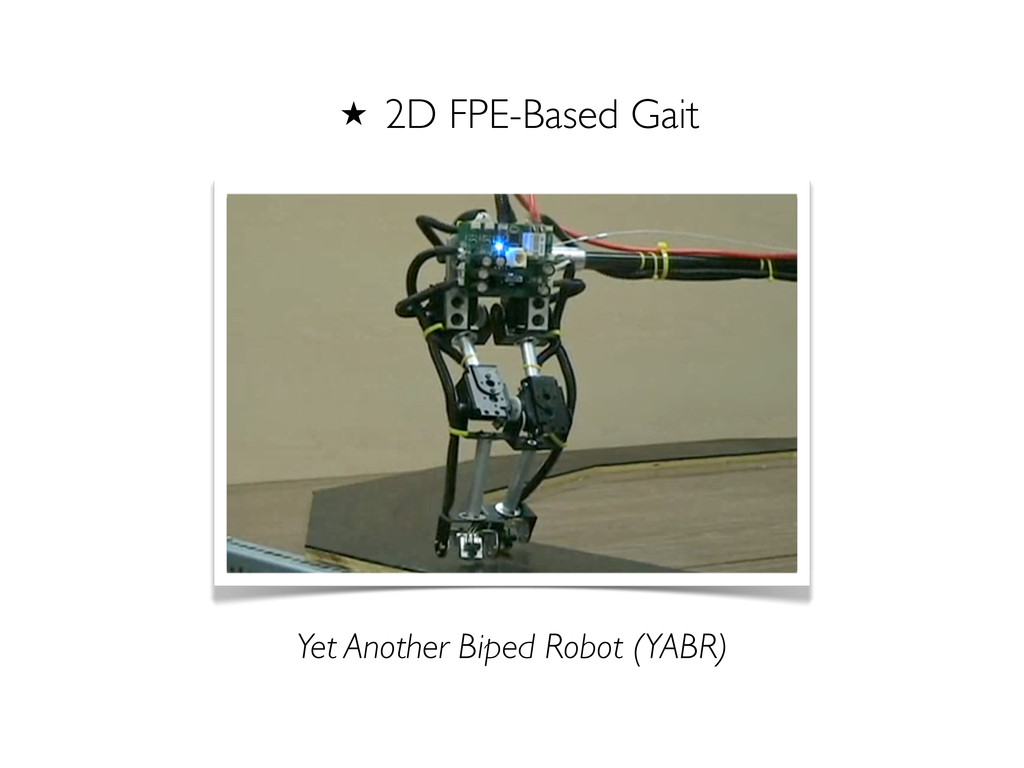
Yet Another Biped Robot (YABR) ★ 2D FPE-Based Gait
Yet Another Biped Robot (YABR) ★ 2D FPE-Based Gait
Remarks on FPE ★ Inherently robust (by design) ★ Can
combine with simple control strategies ★ Makes a few assumptions (i.e. mass-less legs) ★ Requires fast control + actuators
Contributions to Bipedal Locomotion ★ Can be combined with any
other approach as an emergency mechanism (even ZMP). ★ Provides an indicator of how unstable the biped is. ★ Biologically verified with human experiments
MASc Research + Project
Project Goals ★ Implement FPE-based control strategy in dynamic simulations
★ Constrain sagittal motion without the boom (!)
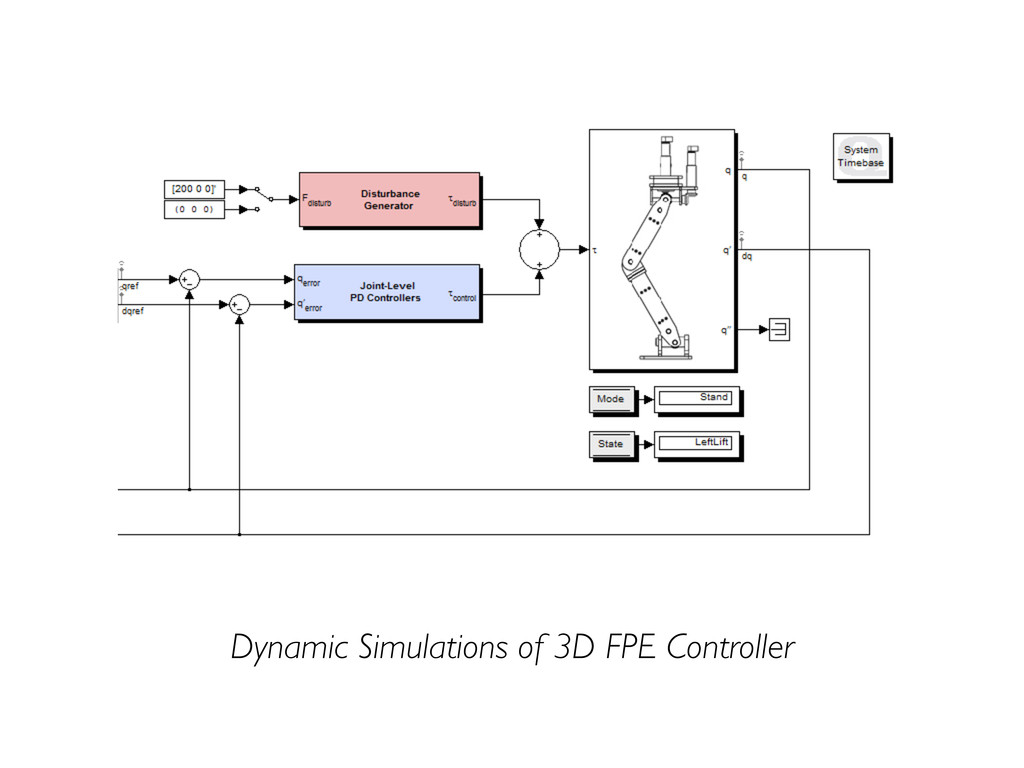
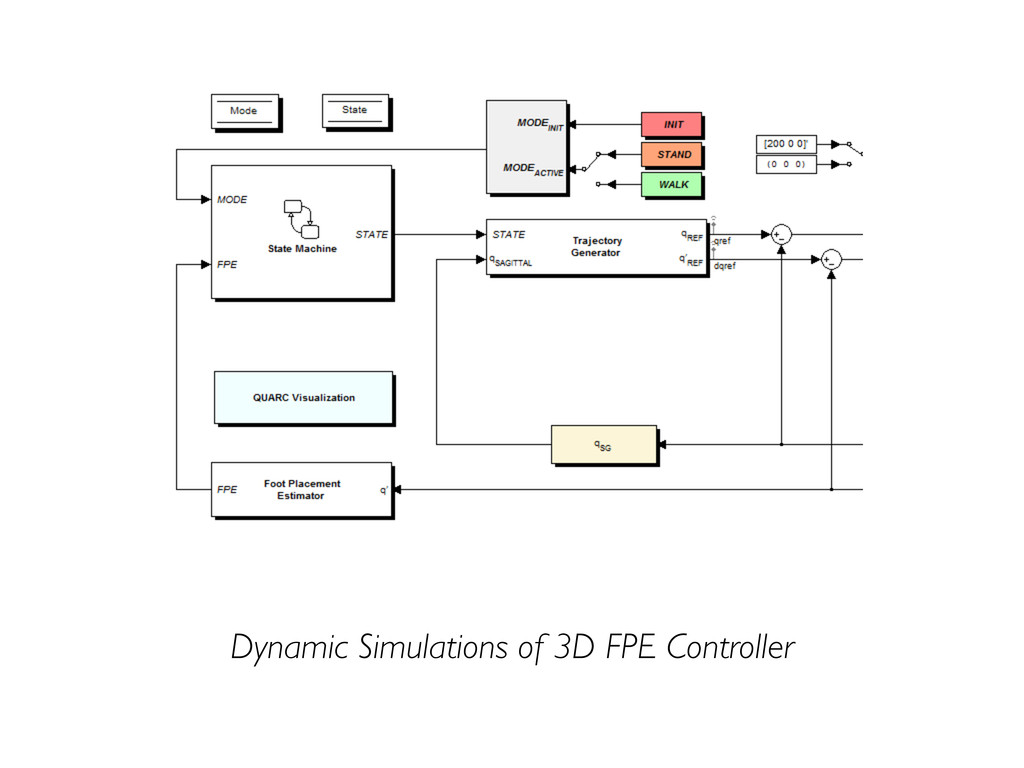
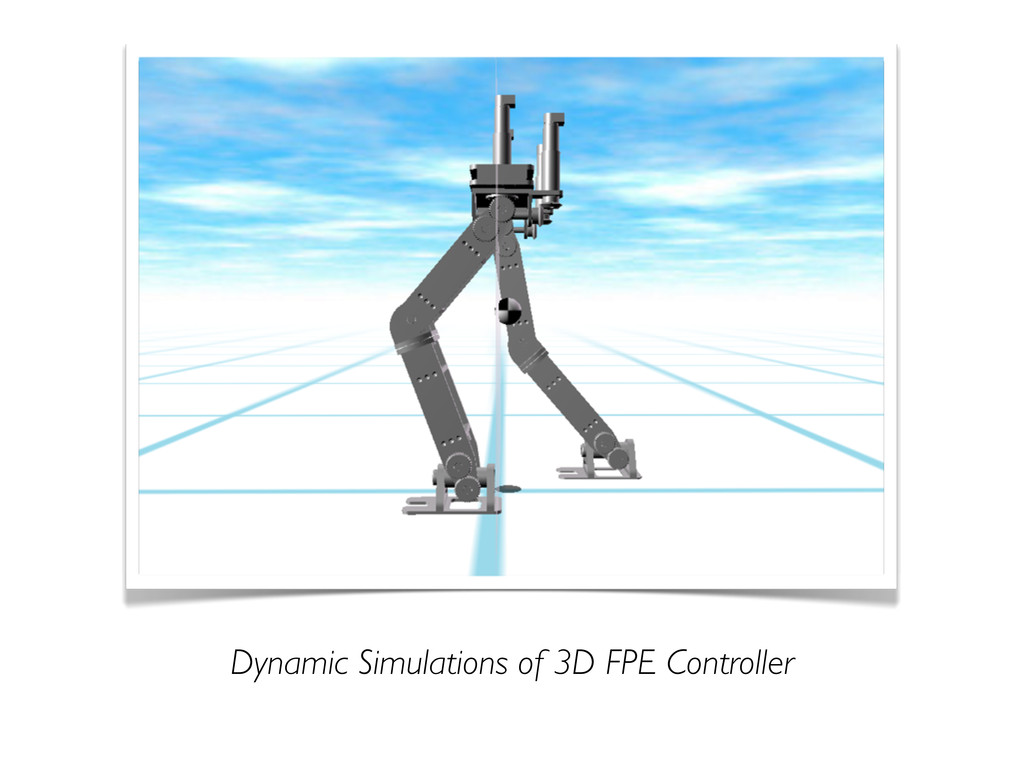
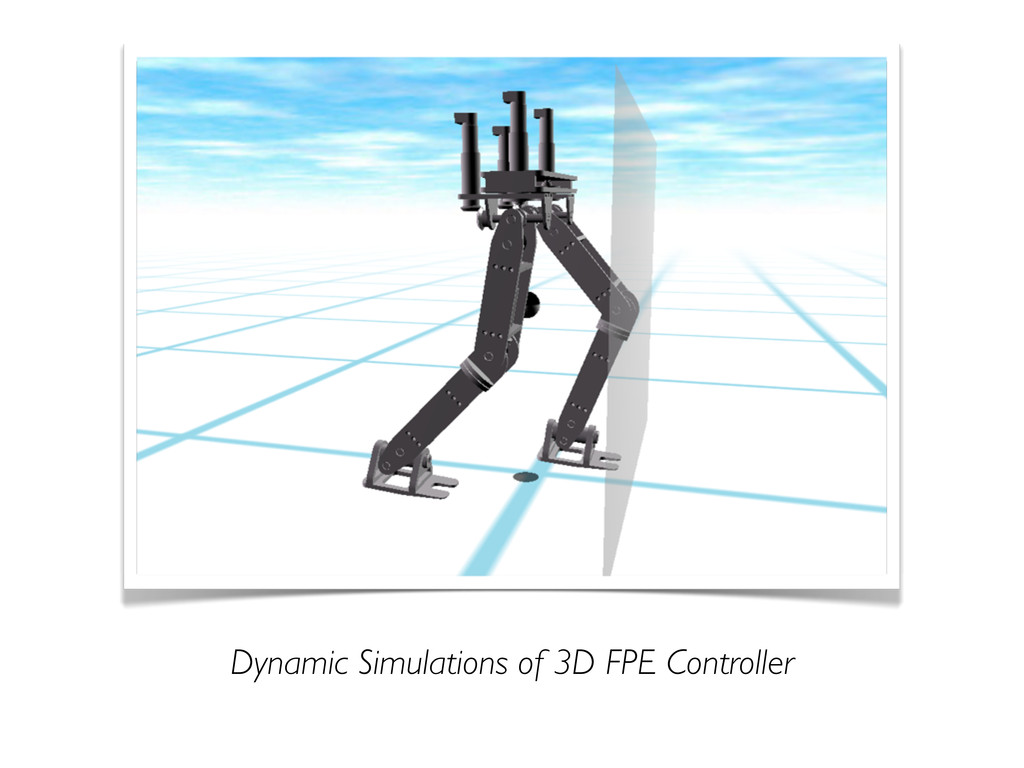
Dynamic Simulations of 3D FPE Controller
Dynamic Simulations of 3D FPE Controller
Dynamic Simulations of 3D FPE Controller
Dynamic Simulations of 3D FPE Controller
MASc Goals ★ Virtual Passive Dynamics ★ Foot Placement Estimator
★ Minimizing Energy Consumption ★ Human-Like Gait Cycles
Questions?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}