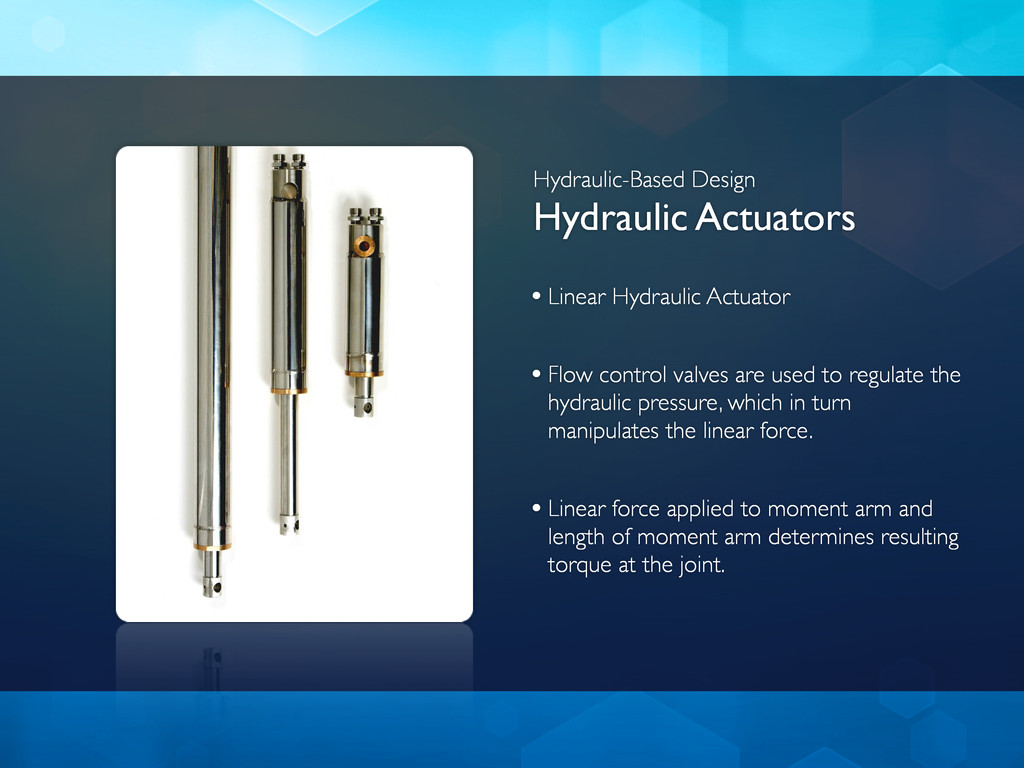
with piston which is pressurized/depressurized. •Pressure controlled via oil from a hydraulic pump. •Force control via pressure manipulation. Hydraulic-Based Design Basic Principles
the hydraulic pressure, which in turn manipulates the linear force. •Linear force applied to moment arm and length of moment arm determines resulting torque at the joint. Hydraulic-Based Design Hydraulic Actuators
power. •Compliant by nature of actuation. •Smaller mass when compared to electric motor designs with equivalent power. Allows for light weight limbs. Hydraulic-Based Design Advantages
•Requires a pump to supply the high pressure oil. Portable pumps have limited capacity. •Increased design complexity and more potential points of failure (oil leaks). •Expensive. Hydraulic-Based Design Disadvantages
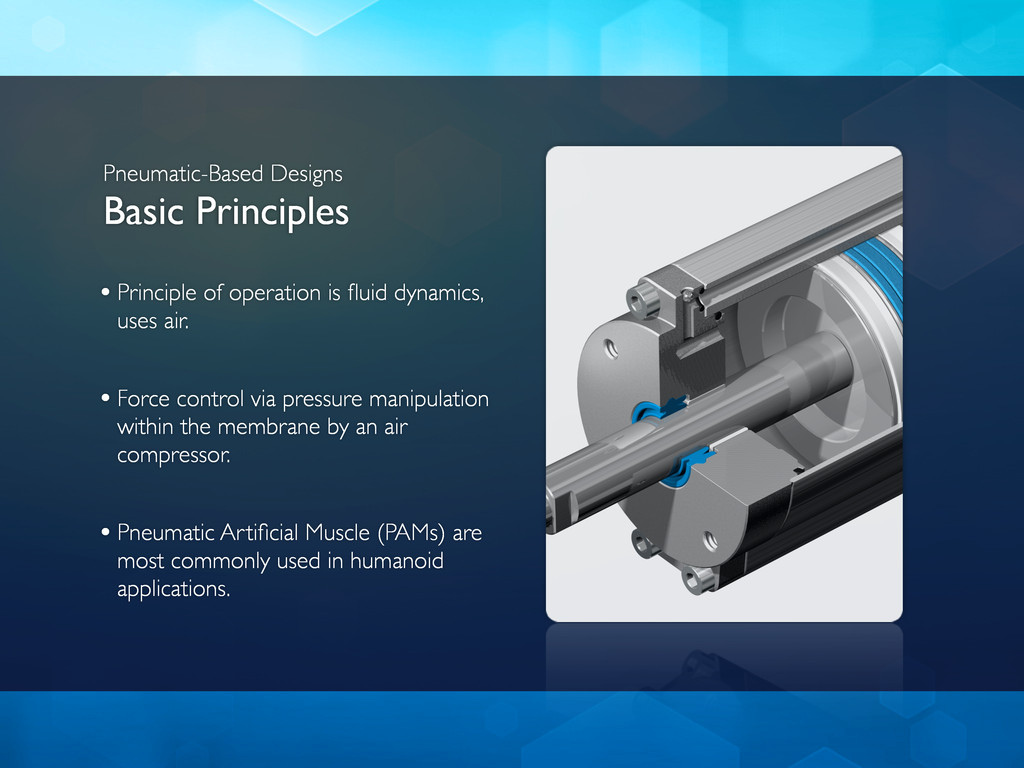
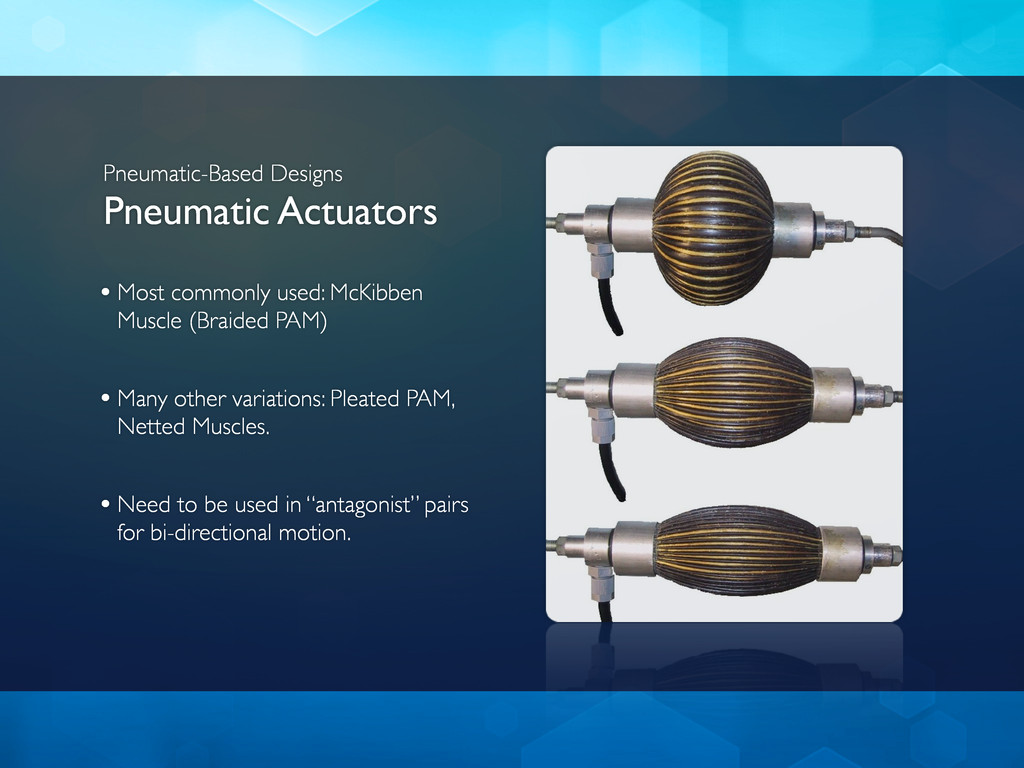
uses air. •Force control via pressure manipulation within the membrane by an air compressor. •Pneumatic Artificial Muscle (PAMs) are most commonly used in humanoid applications.
of gas. •Safer for man-machine interaction when compared to hydraulics. •High power density which allows for lightweight limbs. •Easy to replace individual muscles.
friction and threshold pressure). •Non-linear response and generally not possible to get uniform and constant speed. •Performance depends on the compressibility of air.
by way of adjusting string tension to emulate muscle tightening. •Can be purchased as self-contained actuators which use springs to get compliance. Compliance-Based Designs Principle of Operation
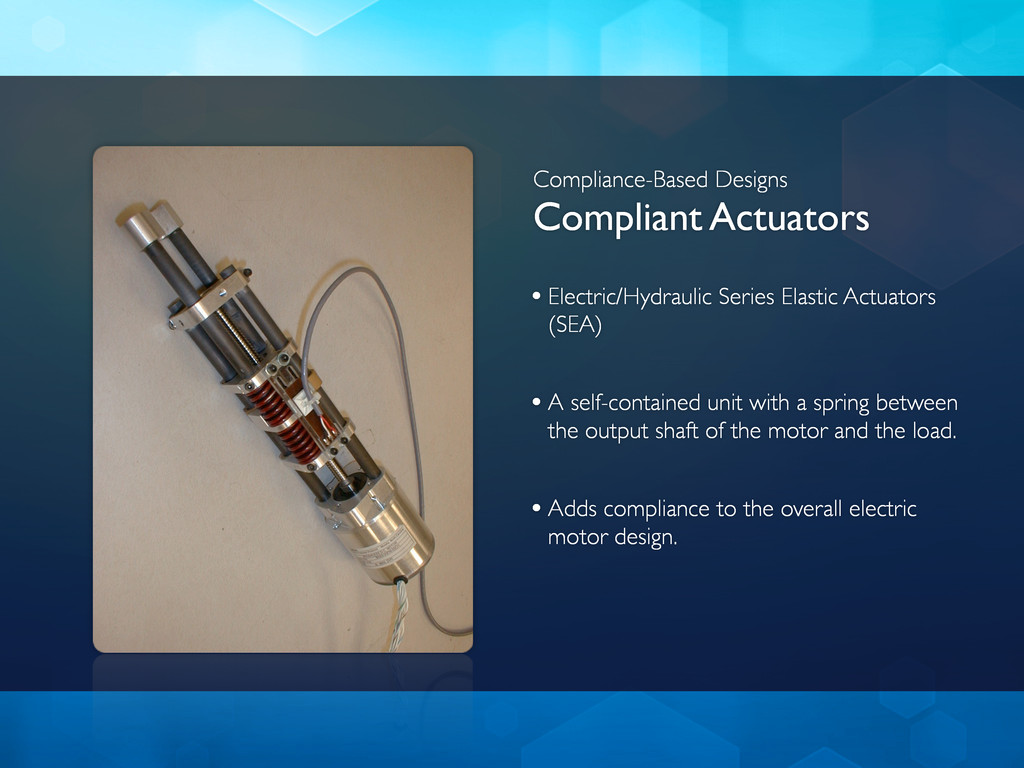
spring between the output shaft of the motor and the load. •Adds compliance to the overall electric motor design. Compliance-Based Designs Compliant Actuators
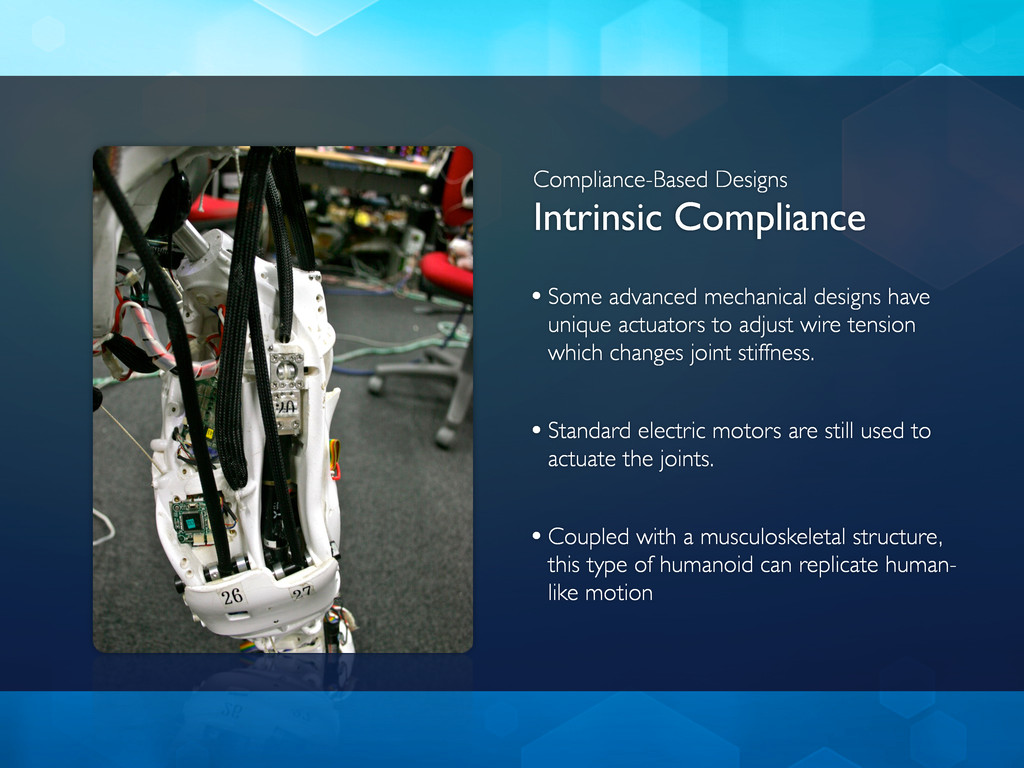
tension which changes joint stiffness. •Standard electric motors are still used to actuate the joints. •Coupled with a musculoskeletal structure, this type of humanoid can replicate human- like motion Compliance-Based Designs Intrinsic Compliance
keep design complexity relatively simple if self-contained compliant actuators are used. •Improved efficiency by storing and reusing energy in spring elements. Compliance-Based Designs Advantages
relocate motors to achieve higher COM. •May significantly increase design complexity if compliance is built into the mechanical design. •Low power density when compared to other compliant mechanisms (hydraulics, pneumatics). Compliance-Based Designs Disadvantages
design choice depends on the application. • Compliant systems provide a fairly good balance between traditional use of electric motors and fully compliant systems like hydraulics/pneumatics. • Hydraulics are a promising design alternative for cases where fast speed and large power requirements are present. • Pneumatics are a promising design alternative for cases where light weight and lower power requirements are present (i.e. humanoid hands).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}