Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Bipedal Locomotion
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Safwan Choudhury
April 25, 2012
Research
74
2
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Bipedal Locomotion
ME 780 Graduate Course Presentation
Safwan Choudhury
April 25, 2012
More Decks by Safwan Choudhury
See All by Safwan Choudhury
Design and Gait Synthesis for a 3D Lower Body Humanoid
safwanc
1
79
ECE 486 Lecture
safwanc
0
350
Controlling Wheelchair Motion with Electroencephalography
safwanc
3
190
Accurate Determination of Joint Angles from Inertial Measurement Unit Data
safwanc
0
190
Gait Controller for 3D Active Dynamic Walking
safwanc
0
170
Learning Thought-Based Motor Control using Gaussian Processes
safwanc
0
140
Analysis of the Foot Placement Estimator
safwanc
0
230
Electromechanical Design
safwanc
0
160
Other Decks in Research
See All in Research
さくらインターネット研究所テックトーク2026春、研究開発Gr.25年度成果26年度方針
kikuzo
0
150
COFFEE-Japan PROJECT Impact Report(海ノ向こうコーヒー)
ontheslope
0
2k
データセンター事業者を取り巻く近年の状況とその中での研究開発動向、テストベッドへの貢献の可能性
kikuzo
1
220
NII S. Koyama's Lab Research Overview AY2026
skoyamalab
0
340
AIで最適化を解けるか?
mickey_kubo
0
120
Dual Quadric表現を用いた動的物体追跡とRGB-D・IMU制約の密結合によるオドメトリ推定
nanoshimarobot
0
420
[IR Reading 2026春 論文紹介] LLM-based Listwise Reranking under the Effect of Positional Bias (ECIR 2026) /IR-Reading-2026-Spring
koheishinden
PRO
0
140
Ghost in the 7‑Zip: The Shadow of Residential Proxies Creeping into Your Life
nttcom
0
1.2k
羽田新ルート運用6年の検証
1manken
0
160
PGDM: Physically Guided Diffusion Model for L Downscaling
satai
2
290
SoftMatcha 2: 1兆語規模コーパスの超高速かつ柔らかい検索
e869120_sub
6
3.5k
(SIGQS17) Frasco-VS:フラグメントに基づく薬剤候補化合物選抜の量子アニーリングによる実現
keisukeyanagisawa
PRO
0
130
Featured
See All Featured
The untapped power of vector embeddings
frankvandijk
2
1.8k
世界の人気アプリ100個を分析して見えたペイウォール設計の心得
akihiro_kokubo
PRO
72
40k
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
56k
Understanding Cognitive Biases in Performance Measurement
bluesmoon
32
2.9k
Exploring anti-patterns in Rails
aemeredith
3
420
The Pragmatic Product Professional
lauravandoore
37
7.3k
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
170
HDC tutorial
michielstock
2
720
What's in a price? How to price your products and services
michaelherold
247
13k
Sam Torres - BigQuery for SEOs
techseoconnect
PRO
0
290
Technical Leadership for Architectural Decision Making
baasie
3
420
Transcript
Bipedal Locomotion ME 780: Course Project Safwan Choudhury
Biped Locomotion ★ Motivations ★ Project Goals ★ Bipedal Locomotion
★ Control Strategy ★ Next Steps
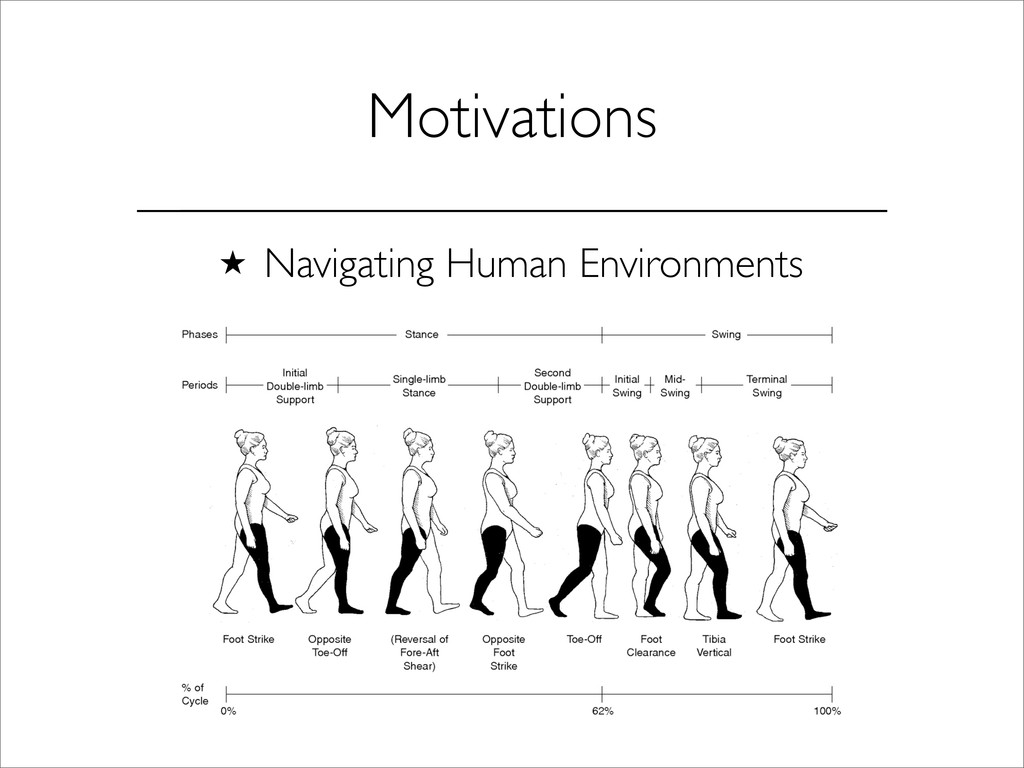
Motivations ★ Navigating Human Environments
ZMP Example 2011 Honda Asimo Video
Passive Dynamics Passive Dynamic Walker Video
MASc Research Goals ★ Virtual Passive Dynamics ★ Foot Placement
Estimator ★ Minimizing energy consumption ★ Human-Like Gait Cycles
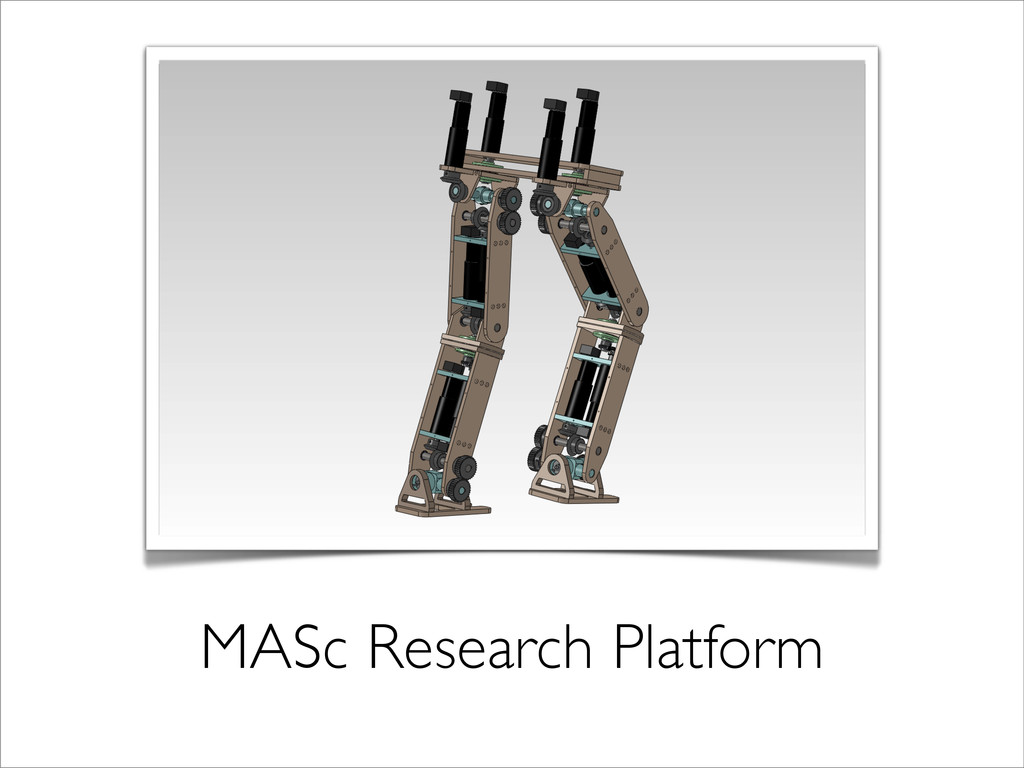
MASc Research Platform
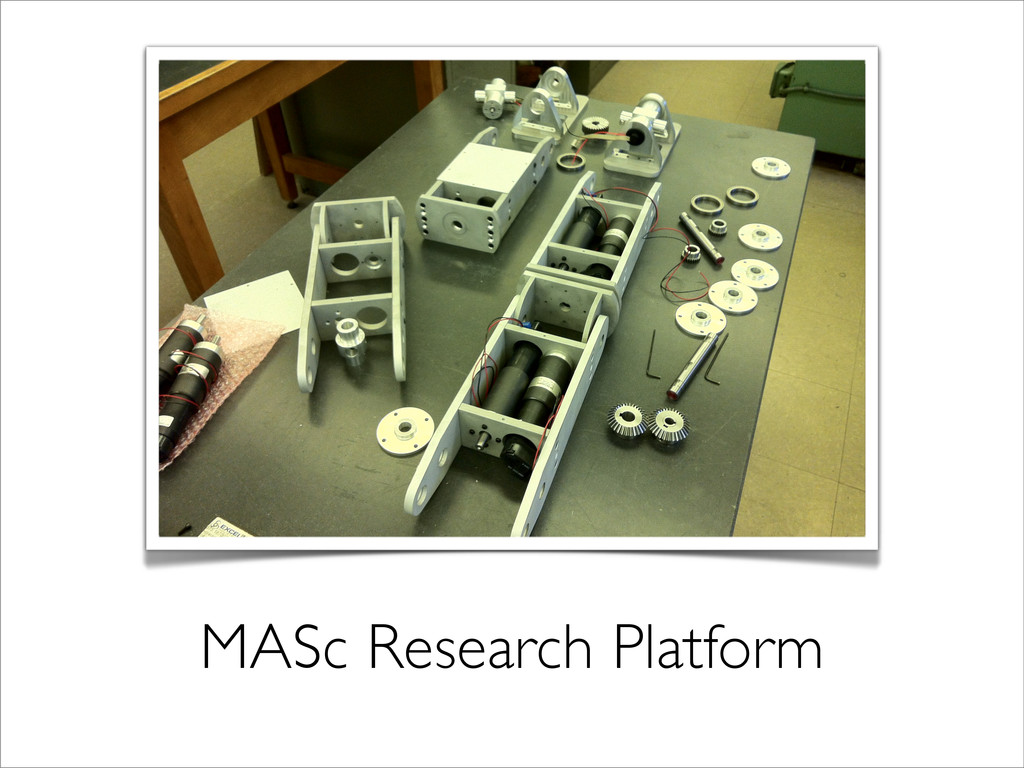
MASc Research Platform
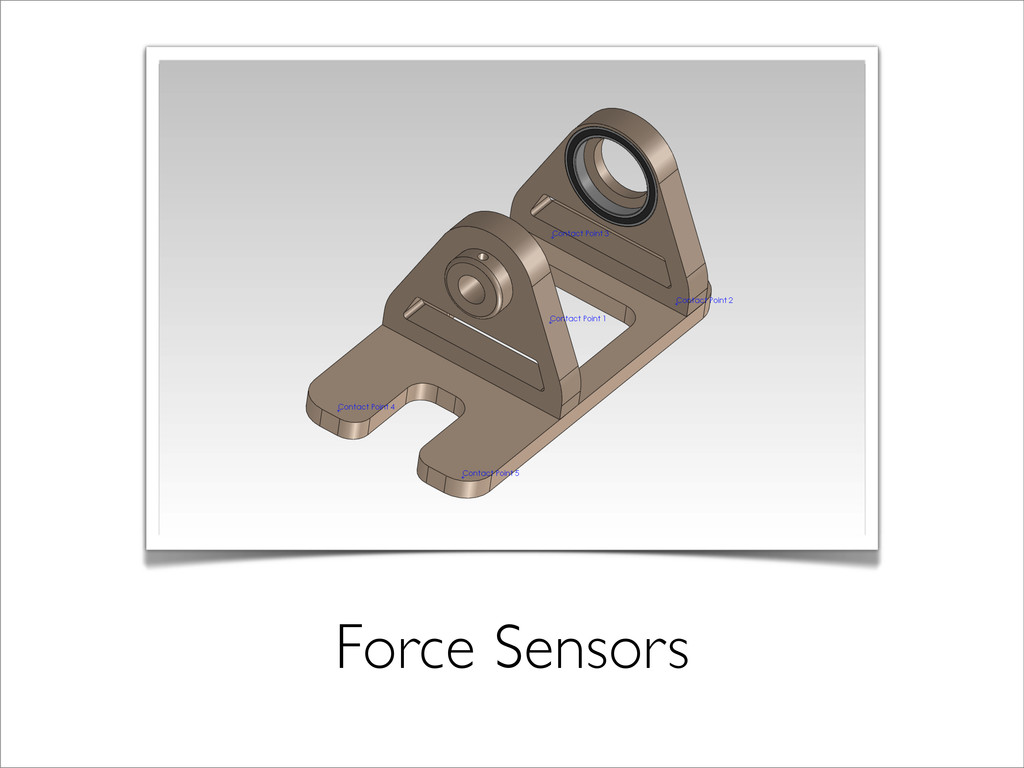
Project Goals ★ ZMP-Based Walking Controller ★ Sensory Inputs: •
Inertial Measurement Units (IMU) • Force/Contact Sensors
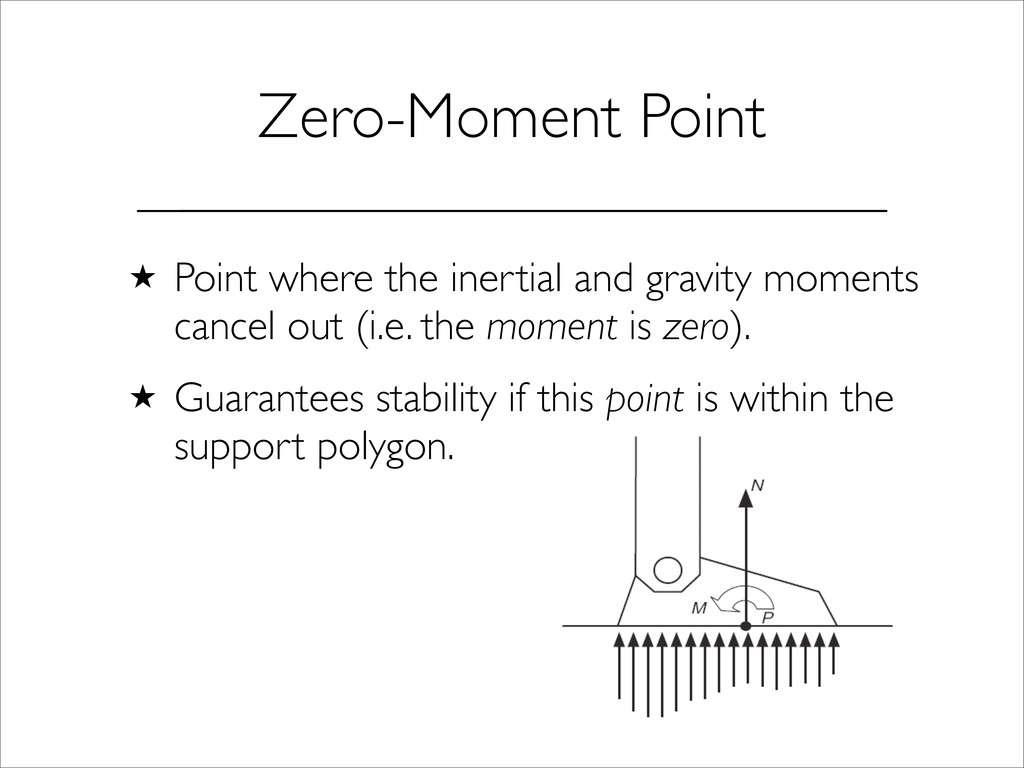
Zero-Moment Point ★ Point where the inertial and gravity moments
cancel out (i.e. the moment is zero). ★ Guarantees stability if this point is within the support polygon.
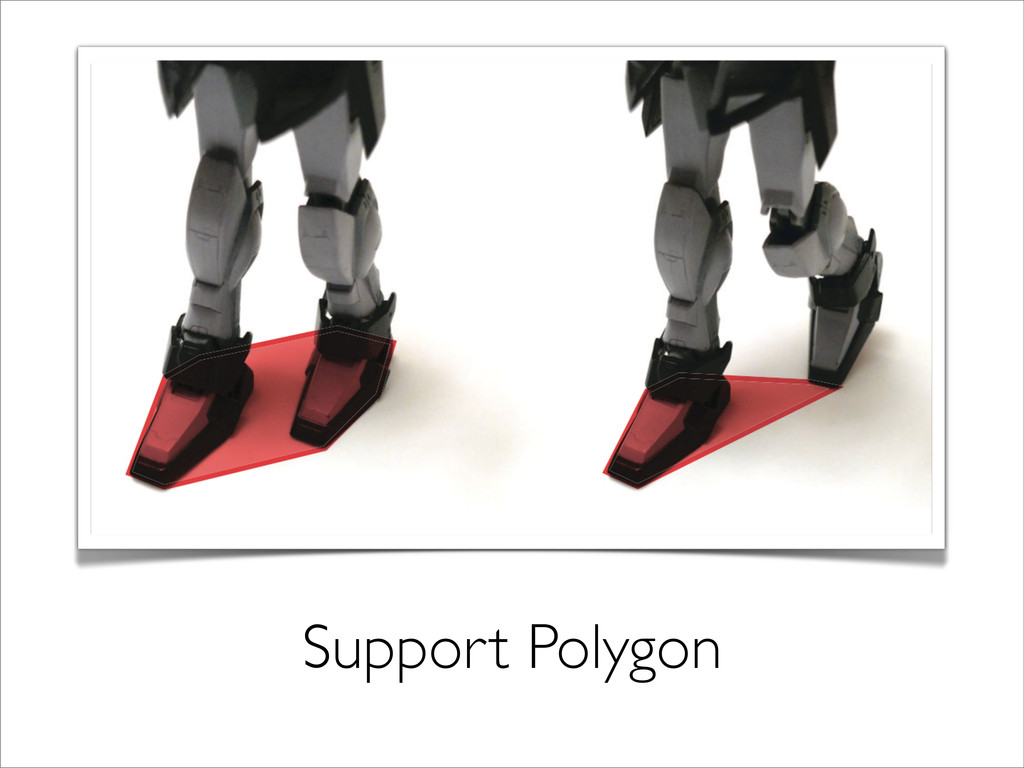
Support Polygon
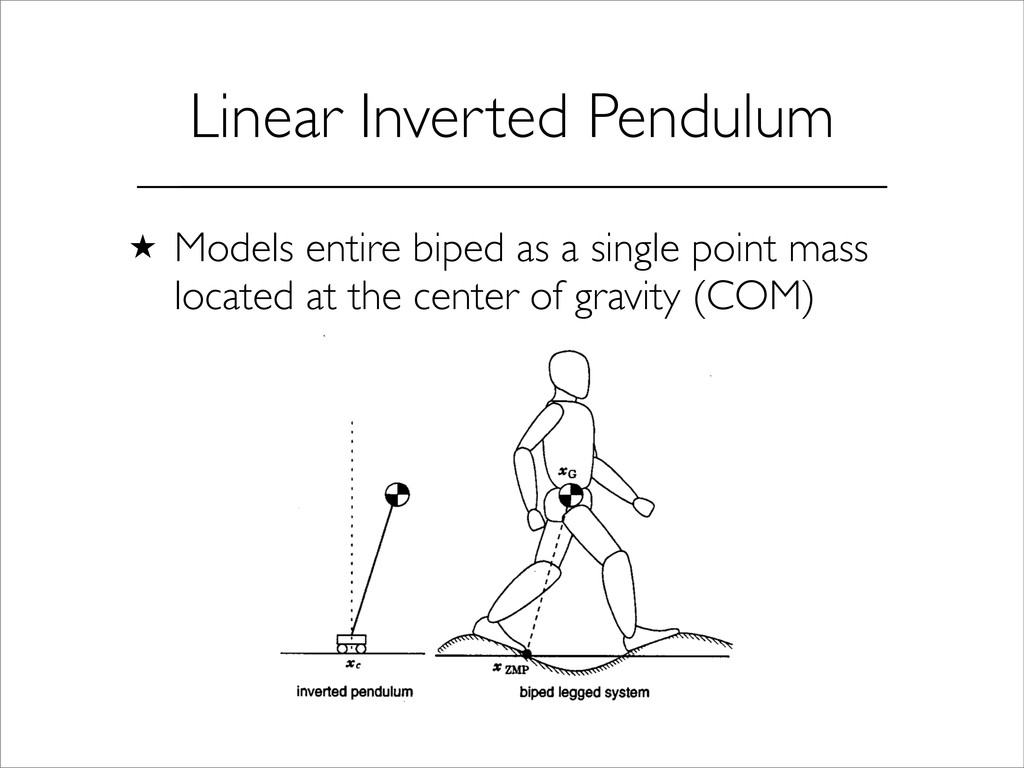
Linear Inverted Pendulum ★ Models entire biped as a single
point mass located at the center of gravity (COM)
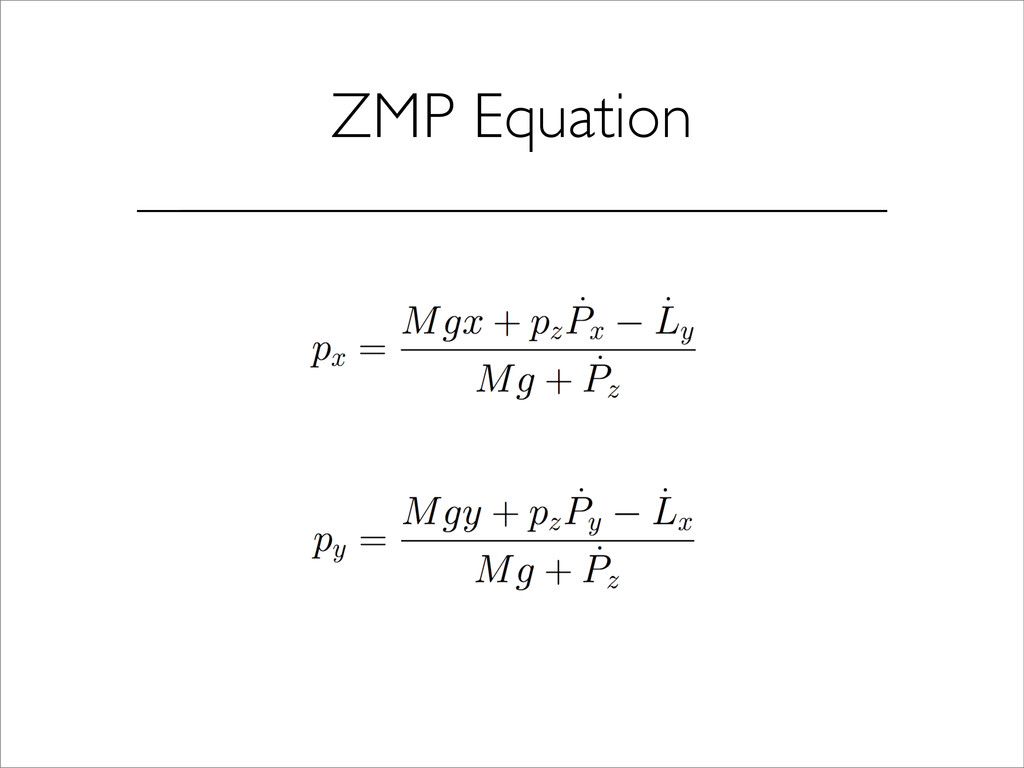
ZMP Equation
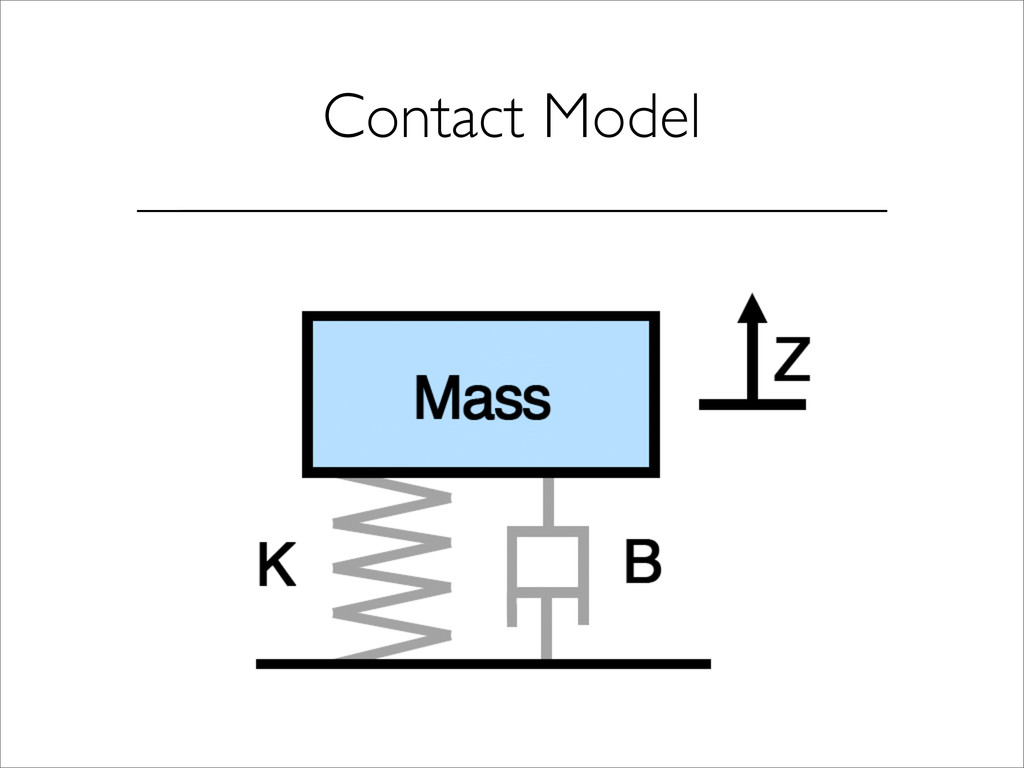
Contact Model
Control Strategy ★ Joint Space Control ★ Operational Space Control
★ Center-of-Mass (COM) Control ★ ZMP-Based Control
qref [−0.8 0.3] Kp 0.1 Kd 0.02 ForwardDynamics u q
qd qdd Error Signal Command Torque Angular Velocites Angular Positions Joint Space Control
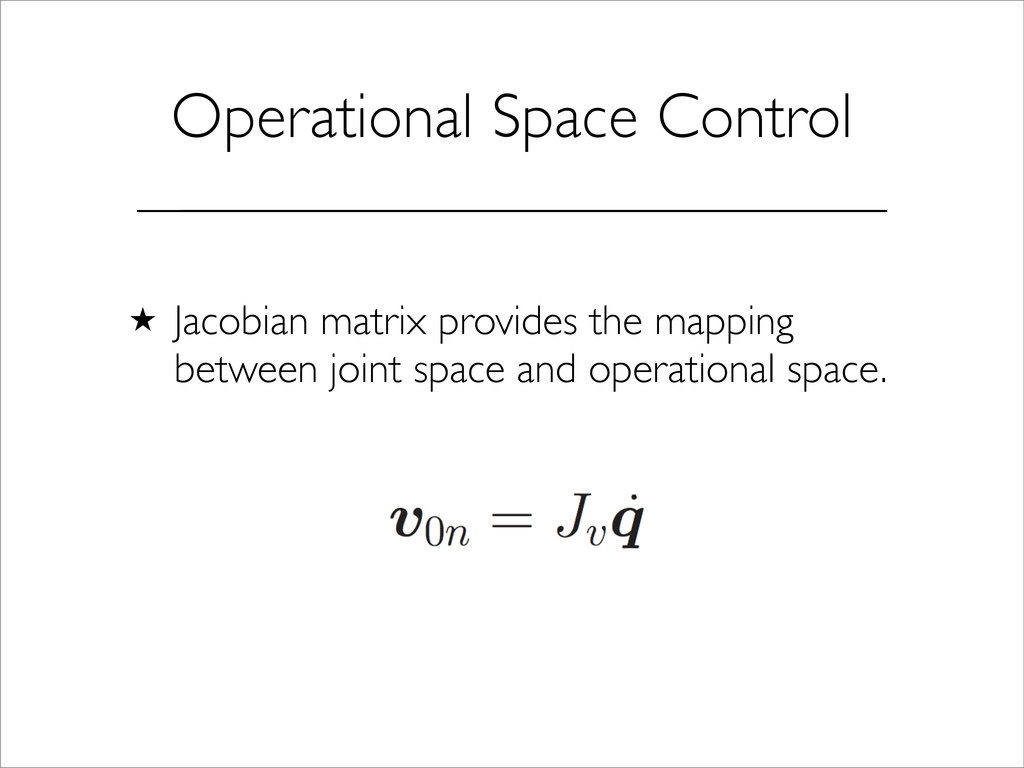
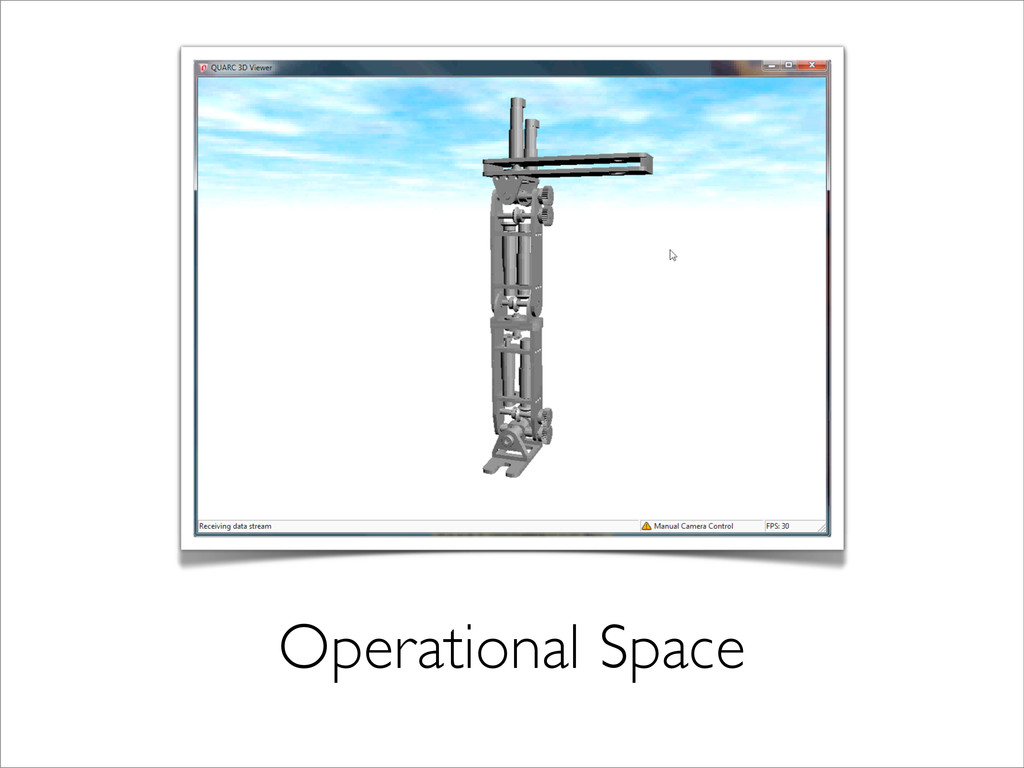
Operational Space Control ★ Jacobian matrix provides the mapping between
joint space and operational space.
Operational Space
Operational Space
Force Sensors
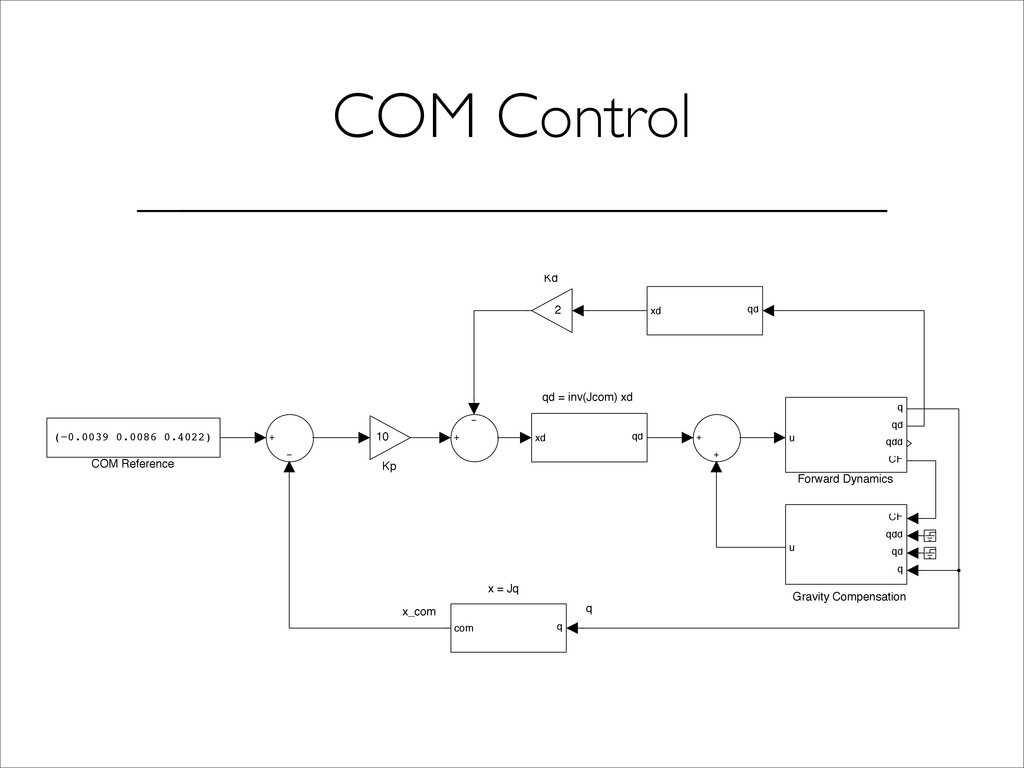
Gravity Compensation q x_com x = Jq qd = inv(Jcom)
xd Kp 10 Kd 2 CF qdd qd q u Forward Dynamics u q qd qdd CF qd xd xd qd q com COM Reference (−0.0039 0.0086 0.4022) COM Control
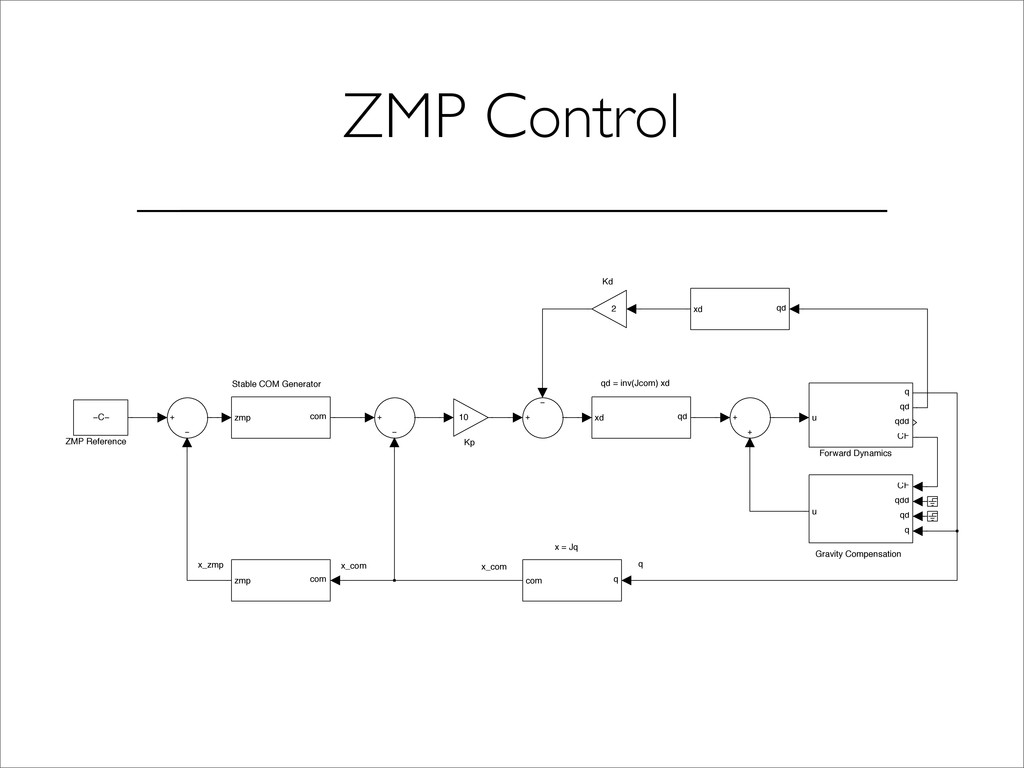
Gravity Compensation q x_com x = Jq qd = inv(Jcom)
xd x_com x_zmp Stable COM Generator ZMP Reference −C− Kp 10 Kd 2 CF qdd qd q u Forward Dynamics u q qd qdd CF zmp com com zmp qd xd xd qd q com ZMP Control
Walking Simulation
Walking Simulation
Next Steps ★ IMU Modelling + Additive Noise ★ Implementing
EKF-Based Estimation ★ State Machine for Cyclic Gait
Questions?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![qref [−0.8 0.3] Kp 0.1 Kd 0.02 ForwardDynamics u q](https://files.speakerdeck.com/presentations/4f97cd69665a8a002200d10d/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}