Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ECE 486 Lecture
Search
Safwan Choudhury
June 06, 2012
Education
350
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ECE 486 Lecture
Safwan Choudhury
June 06, 2012
More Decks by Safwan Choudhury
See All by Safwan Choudhury
Design and Gait Synthesis for a 3D Lower Body Humanoid
safwanc
1
79
Controlling Wheelchair Motion with Electroencephalography
safwanc
3
190
Accurate Determination of Joint Angles from Inertial Measurement Unit Data
safwanc
0
190
Gait Controller for 3D Active Dynamic Walking
safwanc
0
170
Bipedal Locomotion
safwanc
2
74
Learning Thought-Based Motor Control using Gaussian Processes
safwanc
0
140
Analysis of the Foot Placement Estimator
safwanc
0
230
Electromechanical Design
safwanc
0
160
Other Decks in Education
See All in Education
生成AI時代のエンジニア育成について考えてみた
akasan
0
150
AI時代に、 なぜ英語を勉強するのか
empelt
0
110
LinkedIn
matleenalaakso
0
4.4k
Science Tokyo国際卓越研究大学計画_202604
sciencetokyo
PRO
0
4.5k
2026年度春学期 統計学 第4回 データを「分布」で見る (2026. 4. 30)
akiraasano
PRO
0
150
プログラミング言語において文字列を複数行にわたって だらだらと記載するアレ
sapi_kawahara
0
160
Lectura 1 (PIT : Python Basico)
robintux
0
360
共感から、つくる: 変わり続ける自分と、誰かのための創造
micknerd
1
390
Soluciones al examen de Geografía 2026. JUNIO (Convocatoria Ordinaria)
juanmartin2026
0
4.4k
View Manipulation and Reduction - Lecture 9 - Information Visualisation (4019538FNR)
signer
PRO
1
2.7k
0526
cbtlibrary
0
170
Curso de Consagração ao Sagrado Coração de Jesus - O Sagrado Coração na História (Aula 01)
cm_manaus
0
230
Featured
See All Featured
How to train your dragon (web standard)
notwaldorf
97
6.7k
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
140
HDC tutorial
michielstock
2
720
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
The Illustrated Guide to Node.js - THAT Conference 2024
reverentgeek
1
390
How GitHub (no longer) Works
holman
316
150k
I Don’t Have Time: Getting Over the Fear to Launch Your Podcast
jcasabona
34
2.8k
Navigating the Design Leadership Dip - Product Design Week Design Leaders+ Conference 2024
apolaine
1
360
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
Chasing Engaging Ingredients in Design
codingconduct
0
230
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
340
Transcript
ECE 486: Robot Dynamics and Control Practical Applications of the
Jacobian Safwan Choudhury May 31, 2012
Brief Introduction
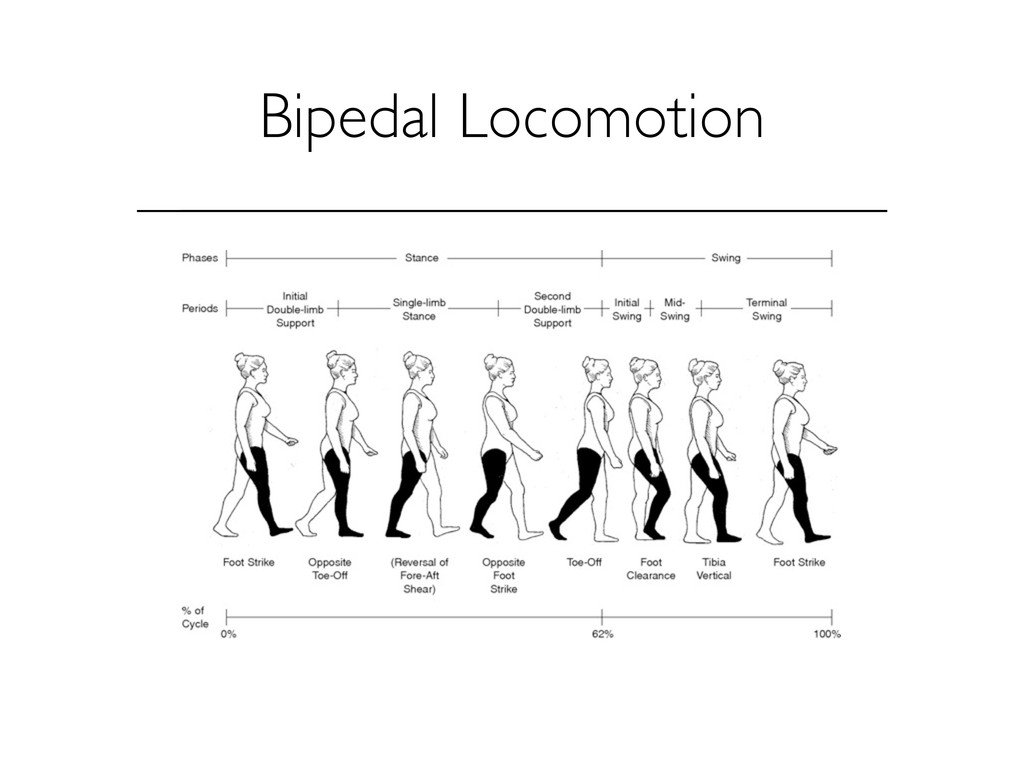
Bipedal Locomotion
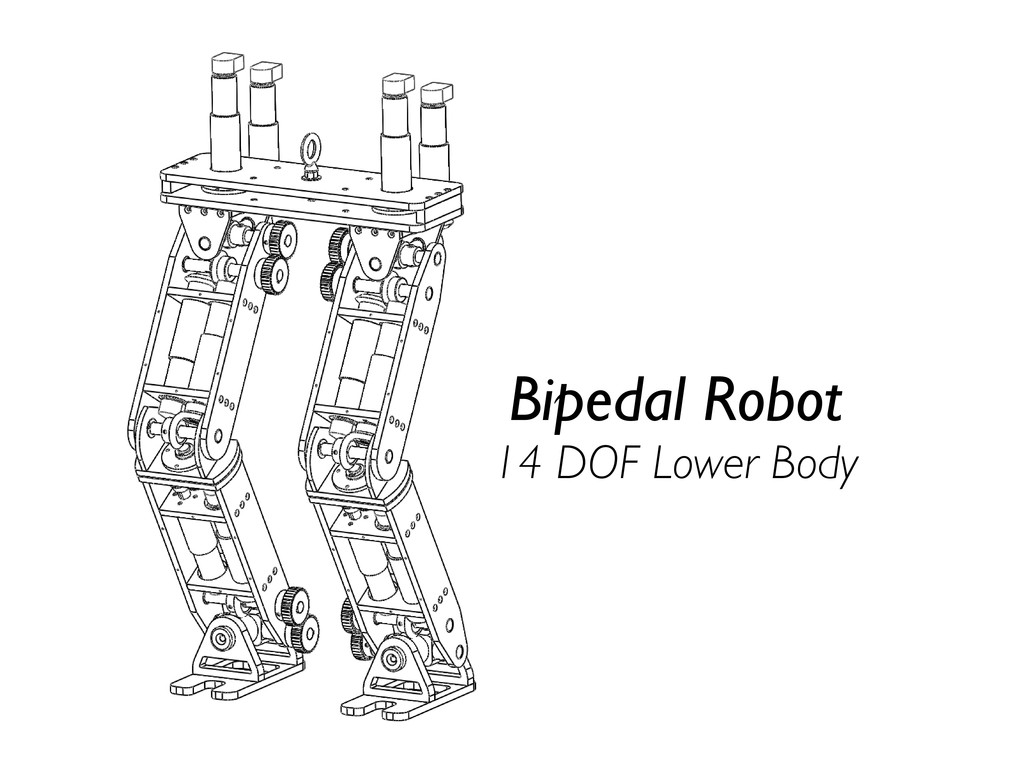
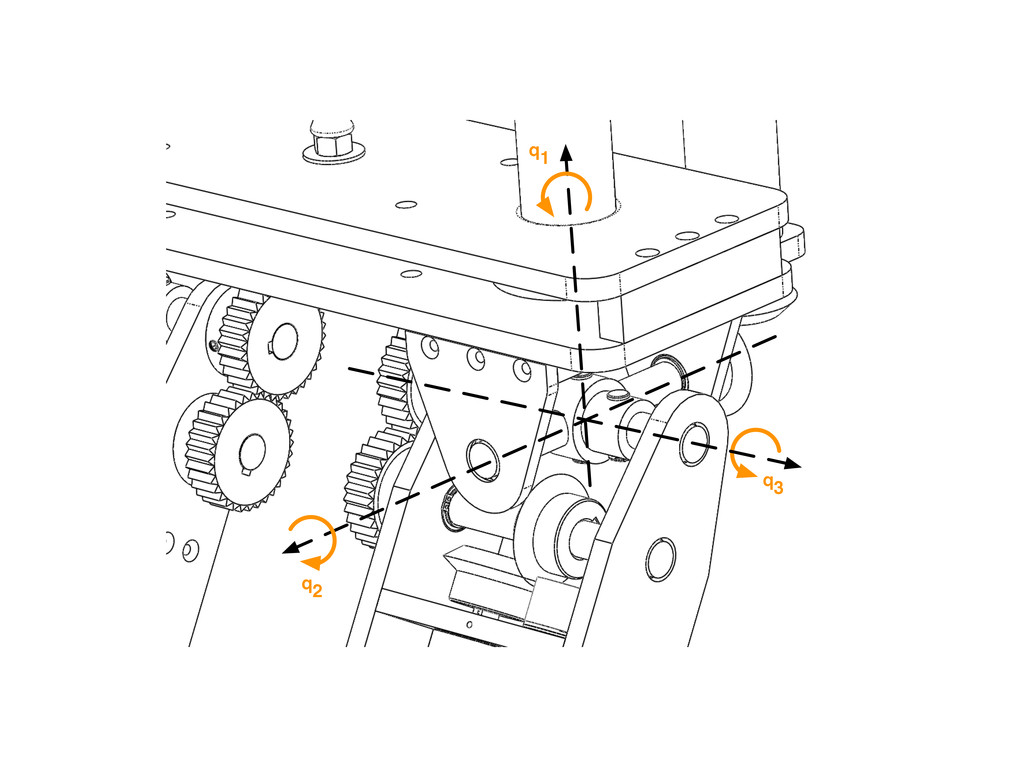
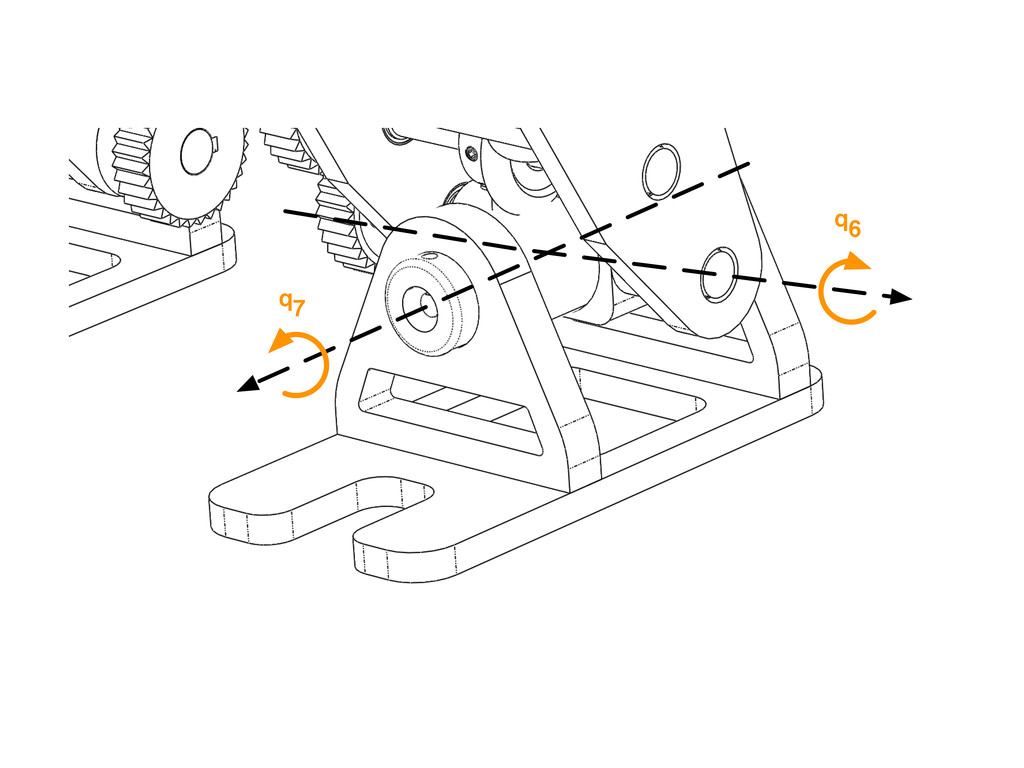
Bipedal Robot 14 DOF Lower Body
q3 q2 q1
q4 q5
q7 q6
Electromechanical Design SolidWorks + Custom Toolchain
High Performance Direct Drive Micromo DC Motors + Misumi Drivetrain
Components
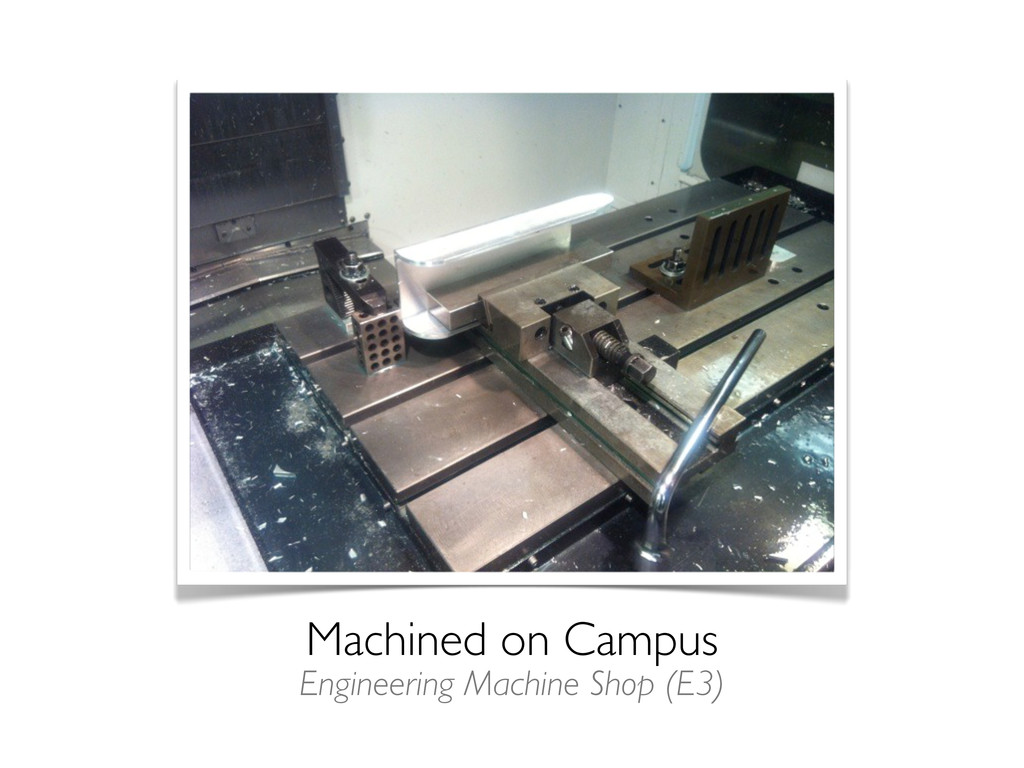
Machined on Campus Engineering Machine Shop (E3)
Full Dynamic Simulations Simulink + SimMechanics + QUARC
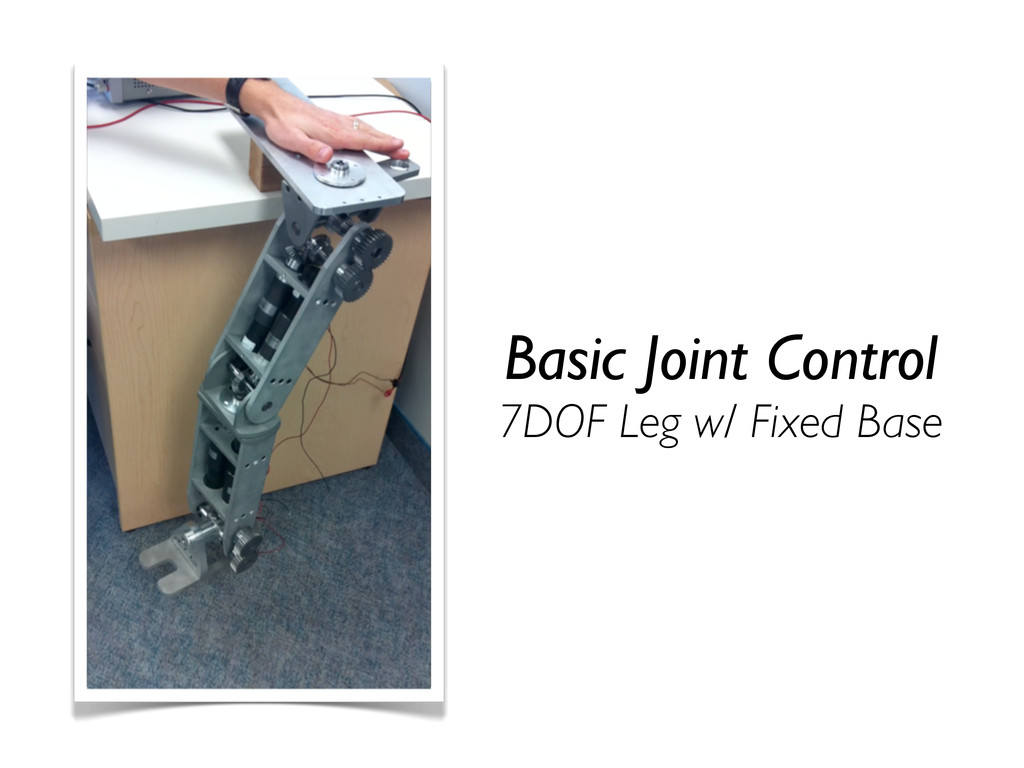
Basic Joint Control 7DOF Leg w/ Fixed Base
The Jacobian Differential Kinematics ˙ x = J ˙ q
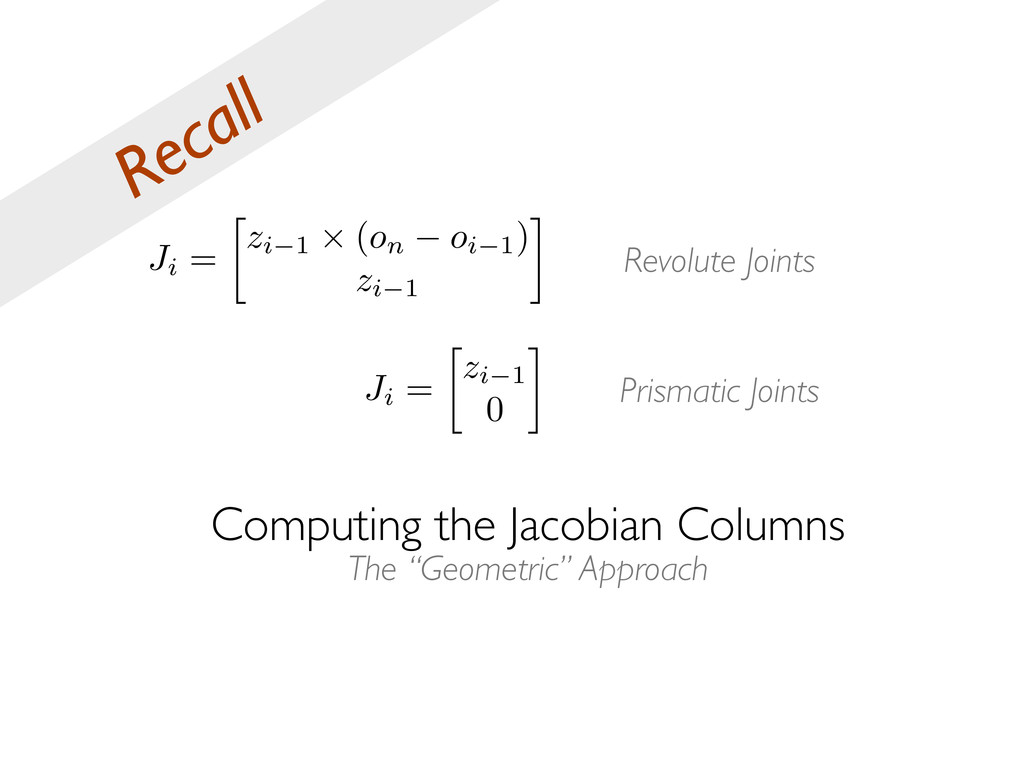
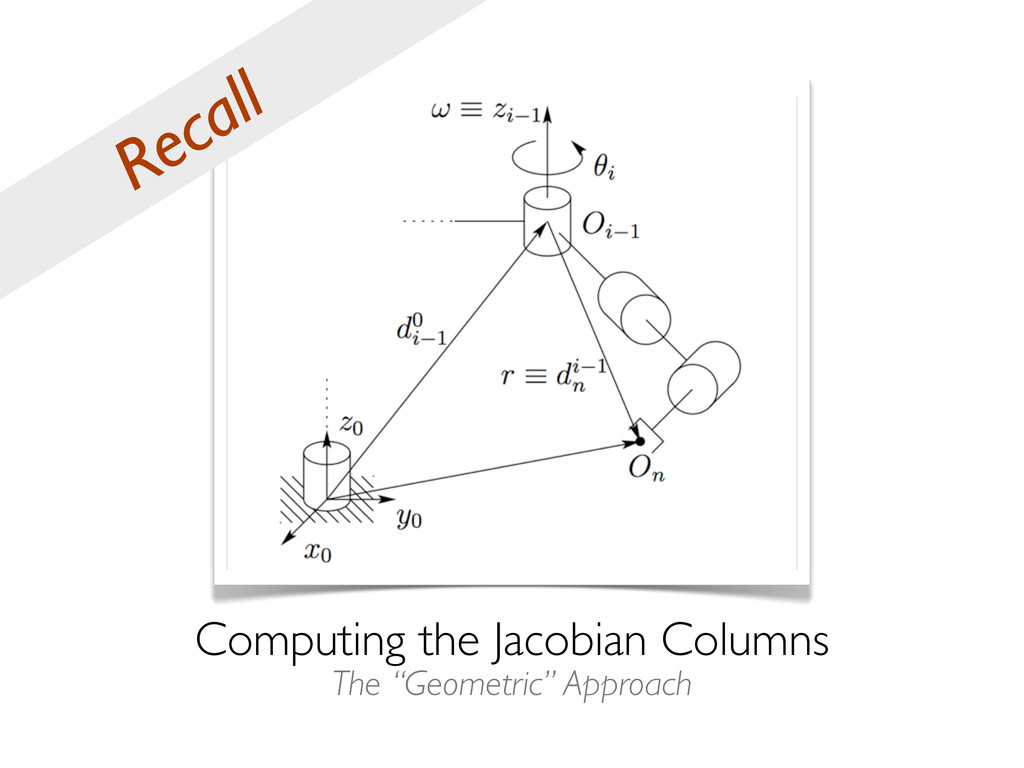
Computing the Jacobian Columns The “Geometric” Approach Recall
Computing the Jacobian Columns The “Geometric” Approach Revolute Joints Ji
= zi 1 ⇥ ( on oi 1) zi 1 Ji = zi 1 0 Prismatic Joints Recall
Why?
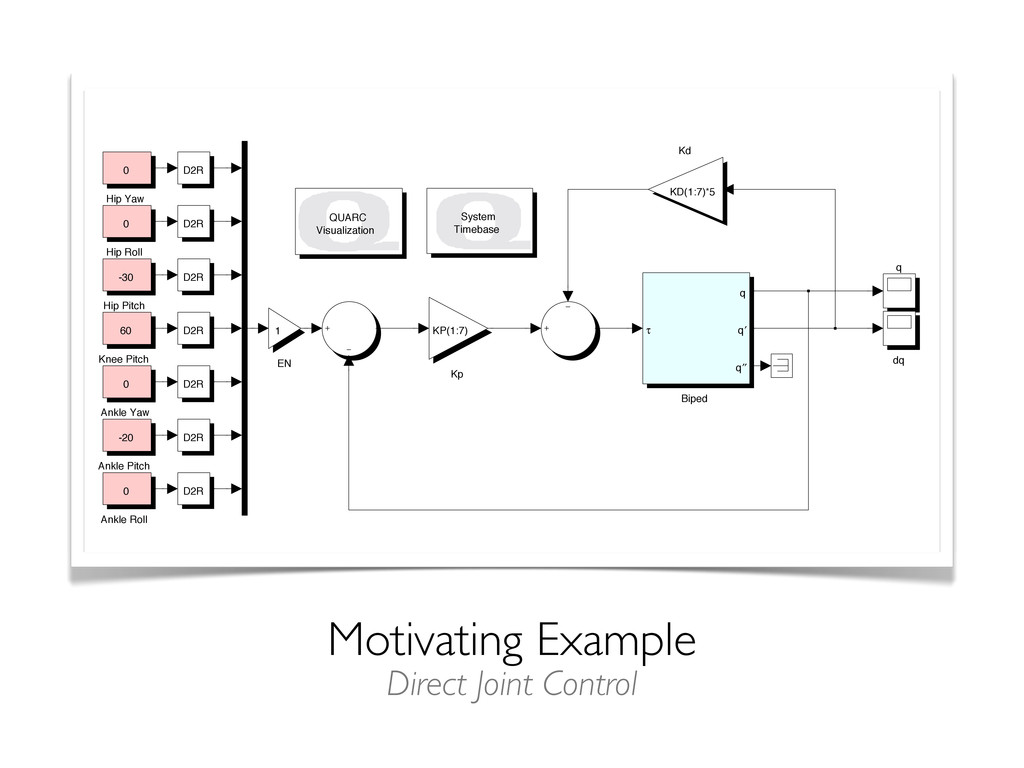
Motivating Example q dq QUARC Visualization System Timebase Kp KP(1:7)
Knee Pitch 60 Kd KD(1:7)*5 Hip Yaw 0 Hip Roll 0 Hip Pitch -30 EN 1 D2R D2R D2R D2R D2R D2R D2R Biped τ q q′ q′′ Ankle Yaw 0 Ankle Roll 0 Ankle Pitch -20 Direct Joint Control
Motivating Example Direct Joint Control
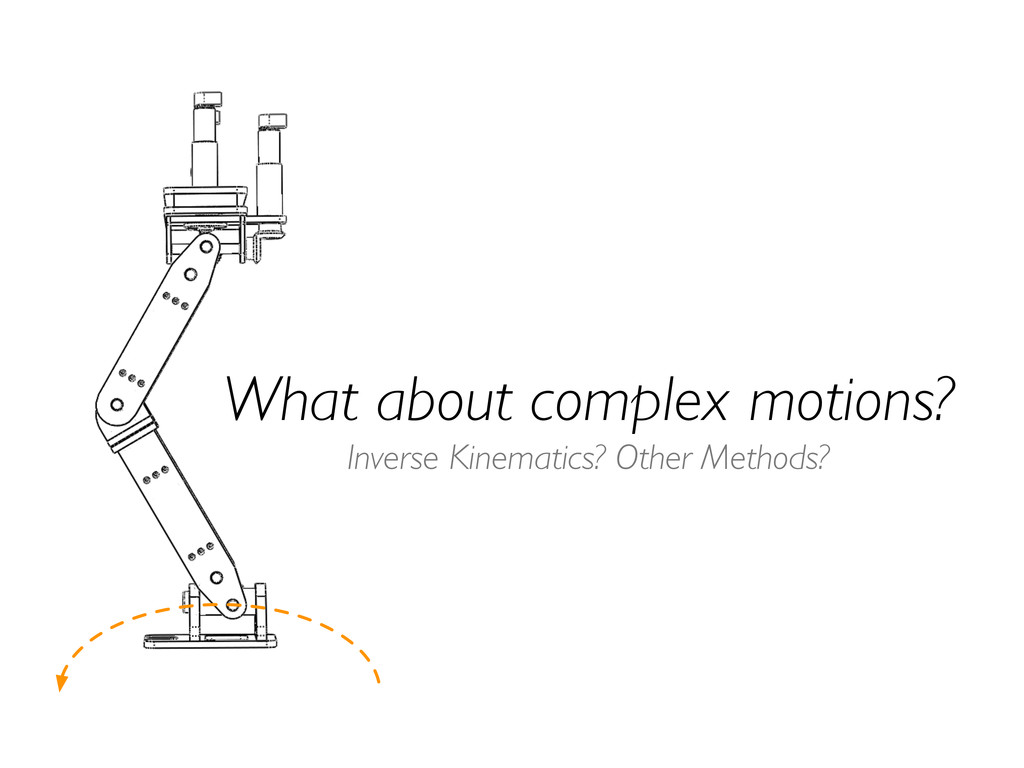
What about complex motions? Inverse Kinematics? Other Methods?
Jacobian Inverse Control Differential Kinematics ˙ q = J 1
˙ x
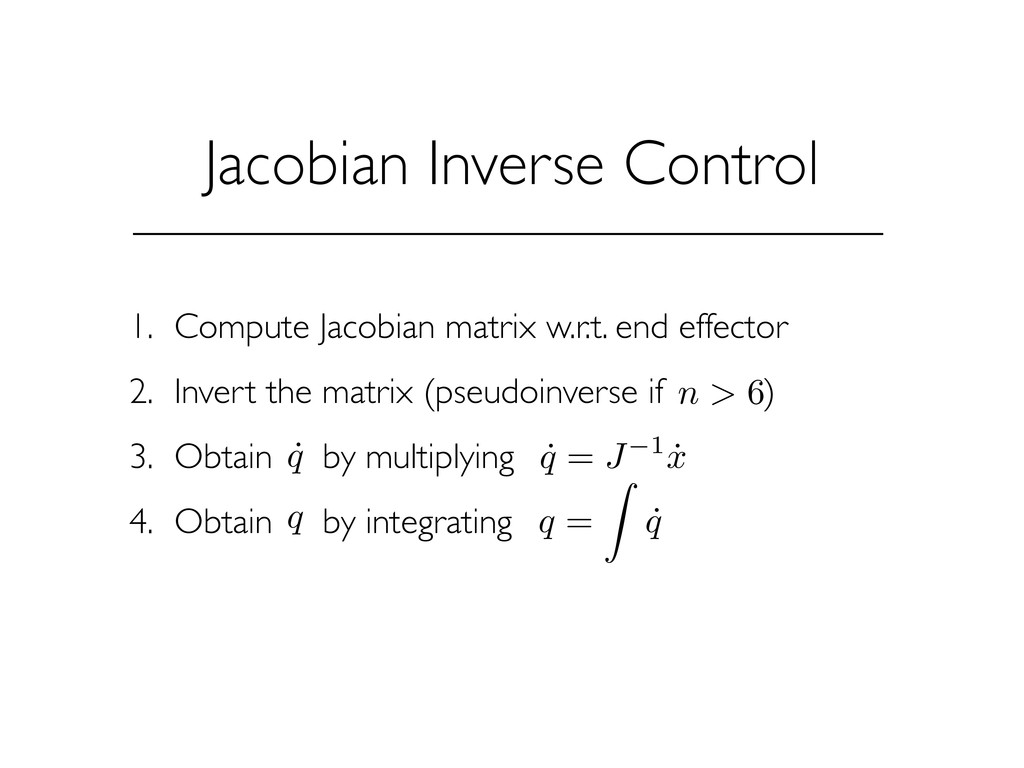
Jacobian Inverse Control 1. Compute Jacobian matrix w.r.t. end effector
2. Invert the matrix (pseudoinverse if ) 3. Obtain by multiplying 4. Obtain by integrating ˙ q q = Z ˙ q q ˙ q = J 1 ˙ x n > 6
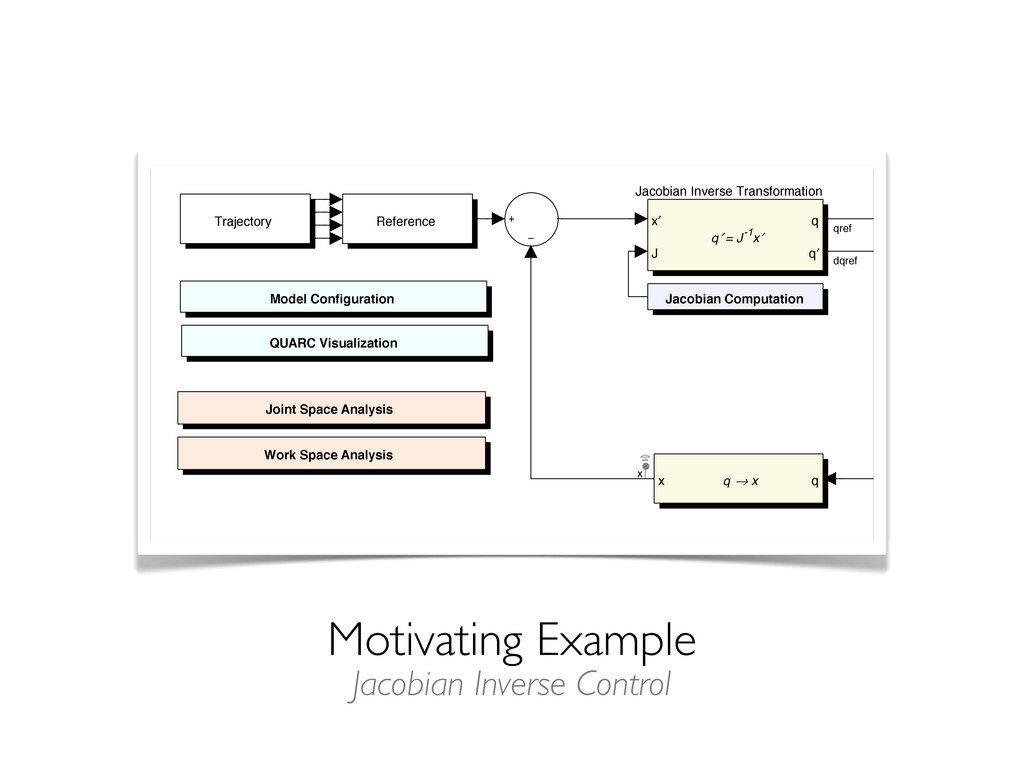
Motivating Example Work Space Analysis QUARC Visualization Trajectory Reference Model
Configuration Joint Space Analysis Jacobian Inverse Transformation q′ = J-1x′ J x′ q q′ Jacobian Computation DQREF QREF q → x q x x dqref qref Jacobian Inverse Control
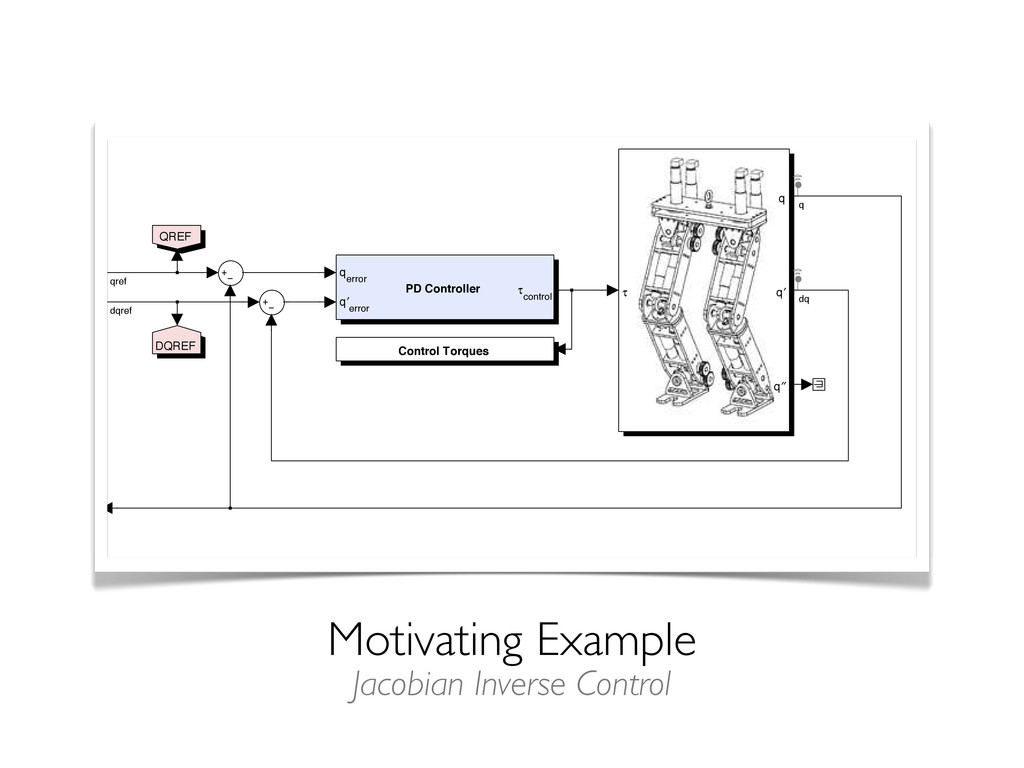
Motivating Example τ q q′ q′′ PD Controller q error
q′ error τ control erse Transformation q′ = J-1x′ q q′ an Computation Control Torques DQREF QREF q → x q q dq dqref qref Jacobian Inverse Control
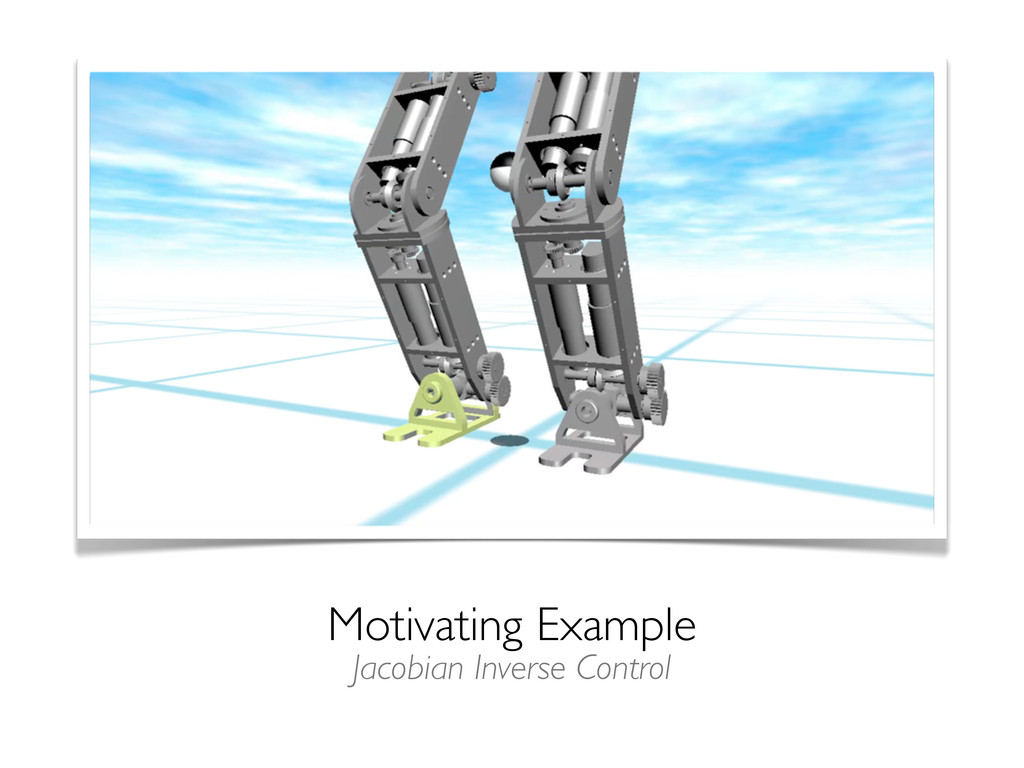
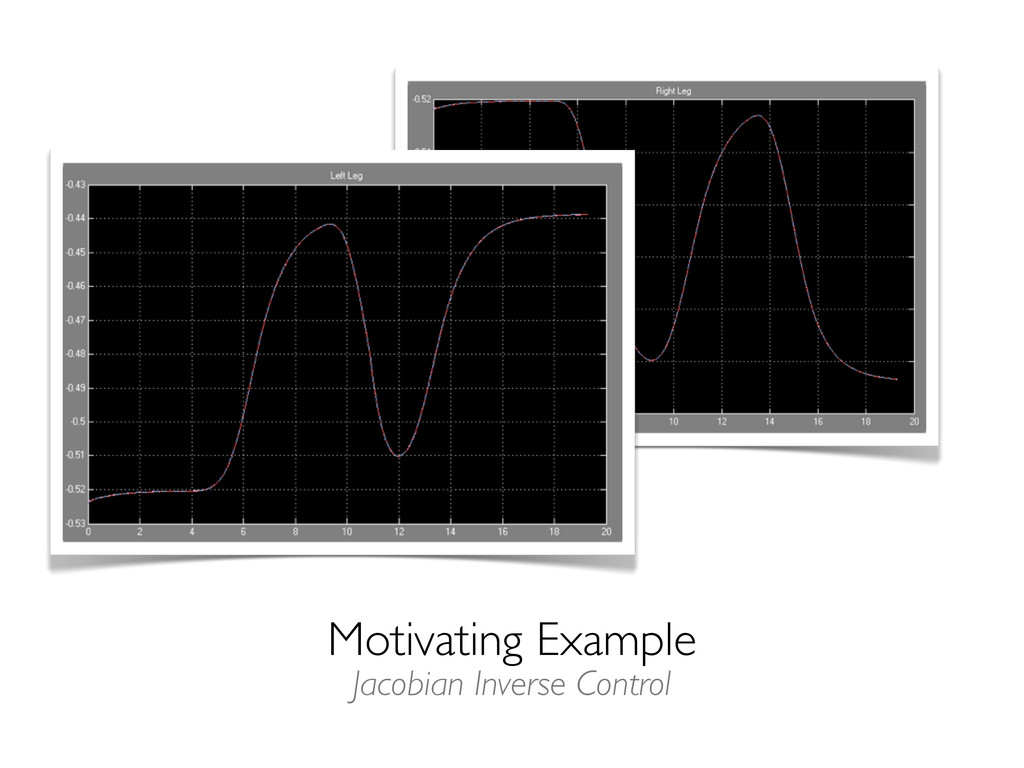
Motivating Example Jacobian Inverse Control
Motivating Example Jacobian Inverse Control
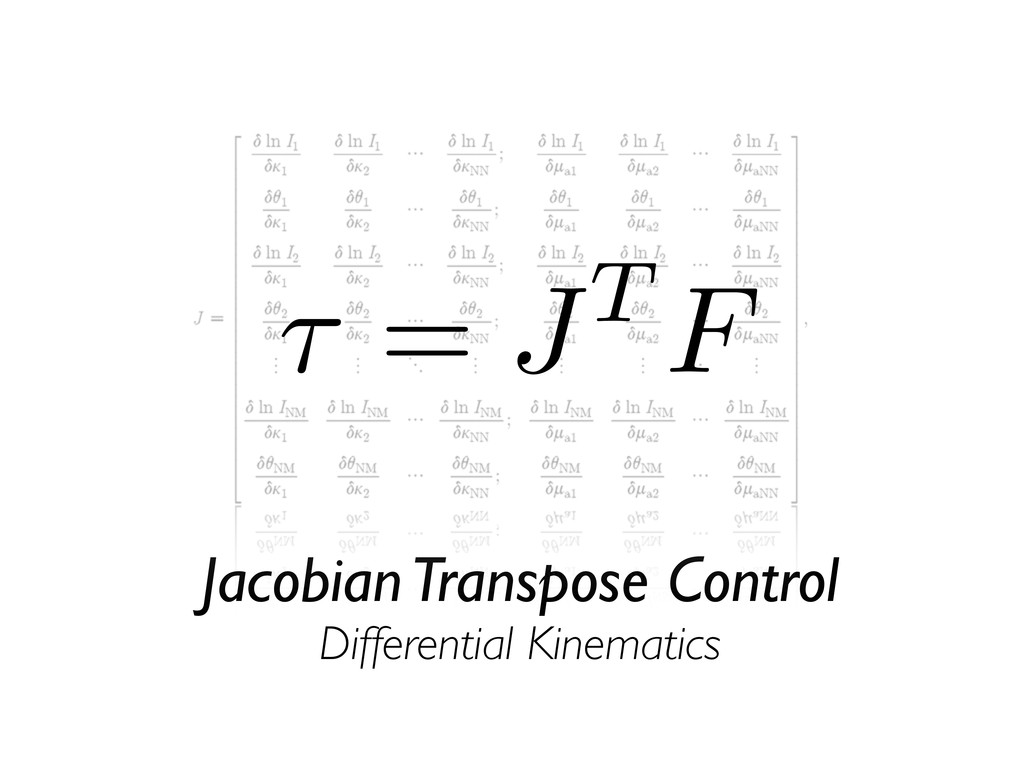
Jacobian Transpose Control Differential Kinematics ⌧ = JT F
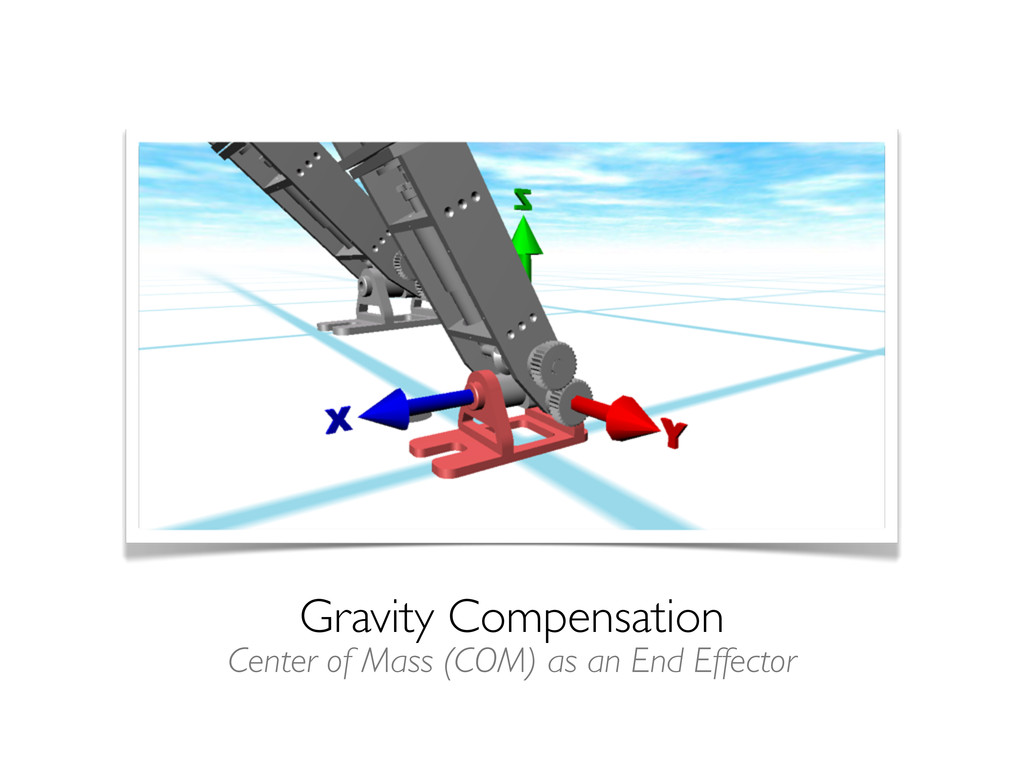
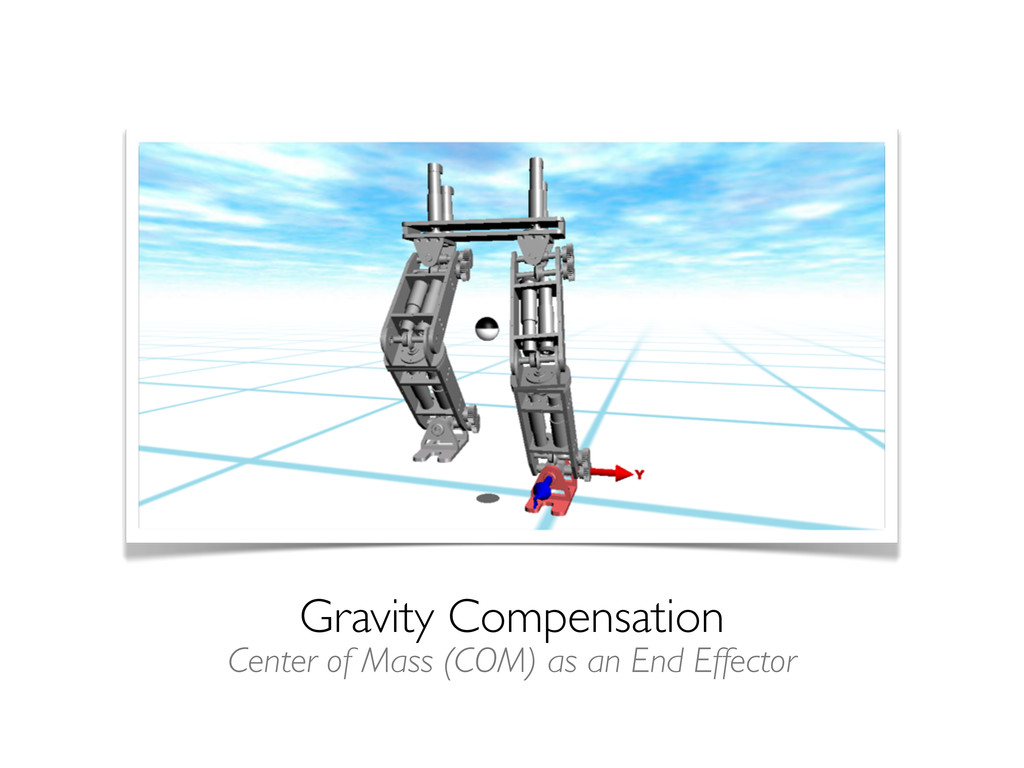
Gravity Compensation Center of Mass (COM) as an End Effector
Motivating Example Without Gravity Compensation
Computing the Jacobian Columns The “Geometric” Approach Recall
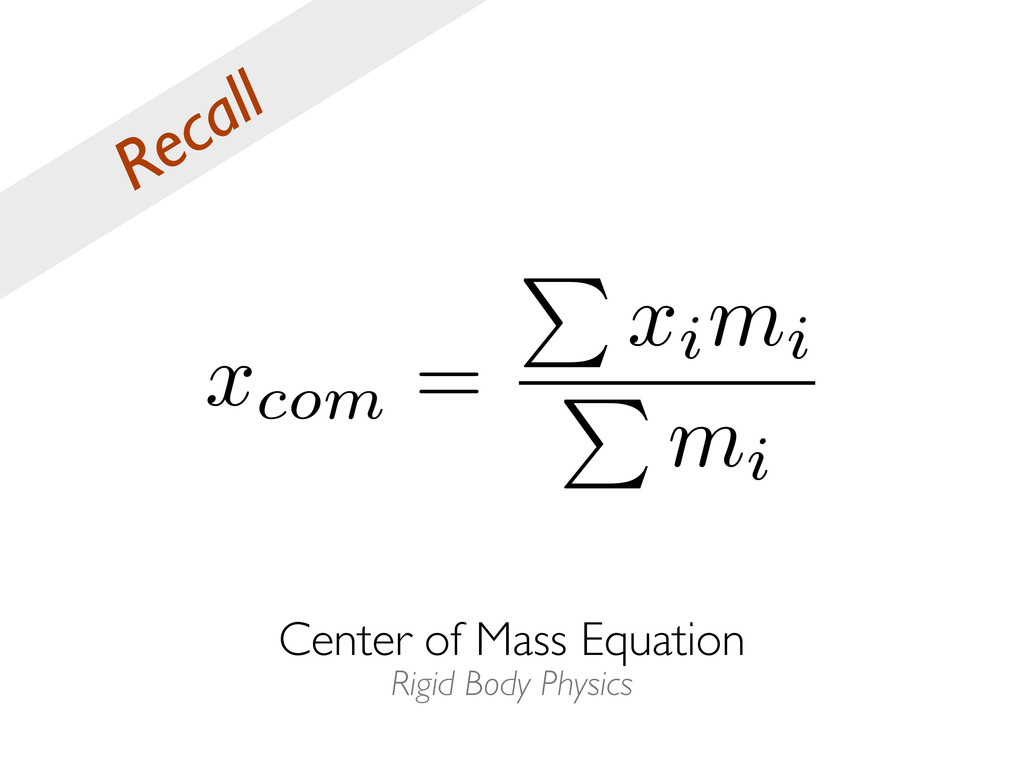
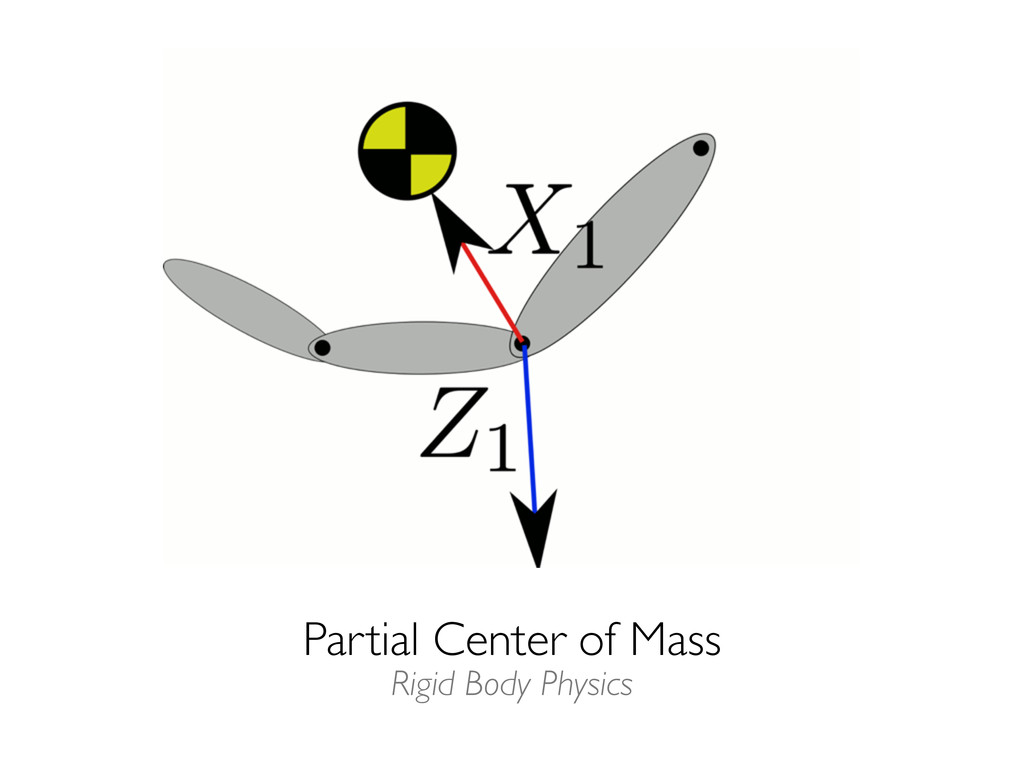
Center of Mass Equation Rigid Body Physics Recall xcom =
P ximi P mi
Gravity Compensation Center of Mass (COM) as an End Effector
Partial Center of Mass Rigid Body Physics
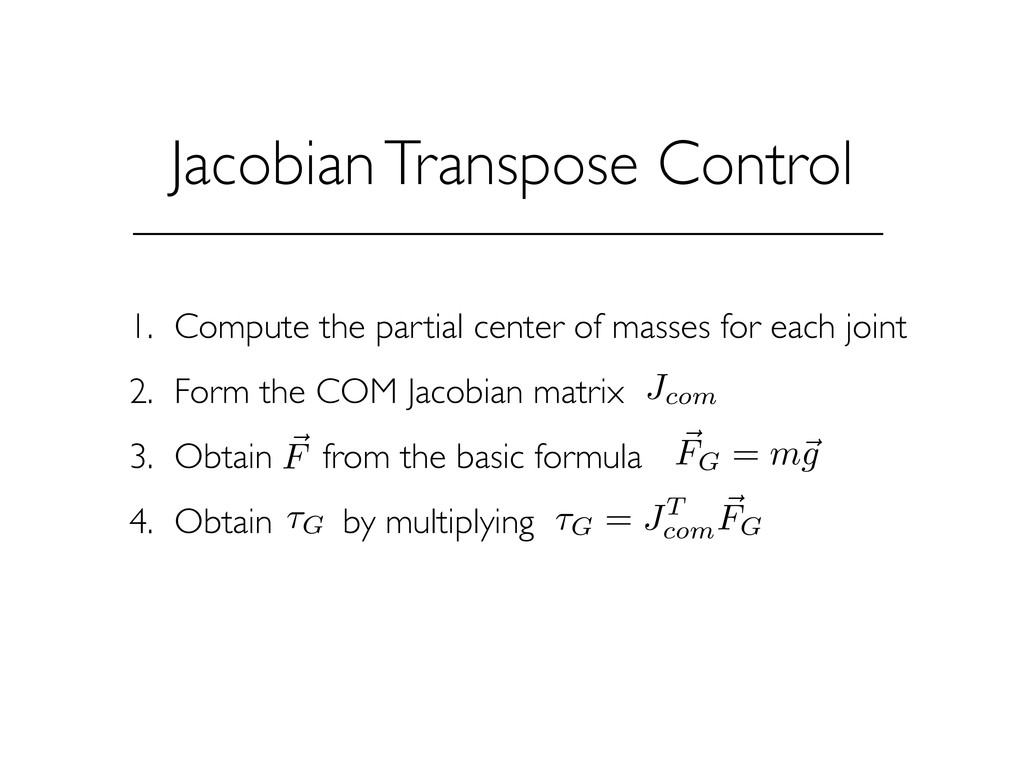
Jacobian Transpose Control 1. Compute the partial center of masses
for each joint 2. Form the COM Jacobian matrix 3. Obtain from the basic formula 4. Obtain by multiplying J com ~ FG = m~ g ~ F ⌧G ⌧ G = JT com ~ F G
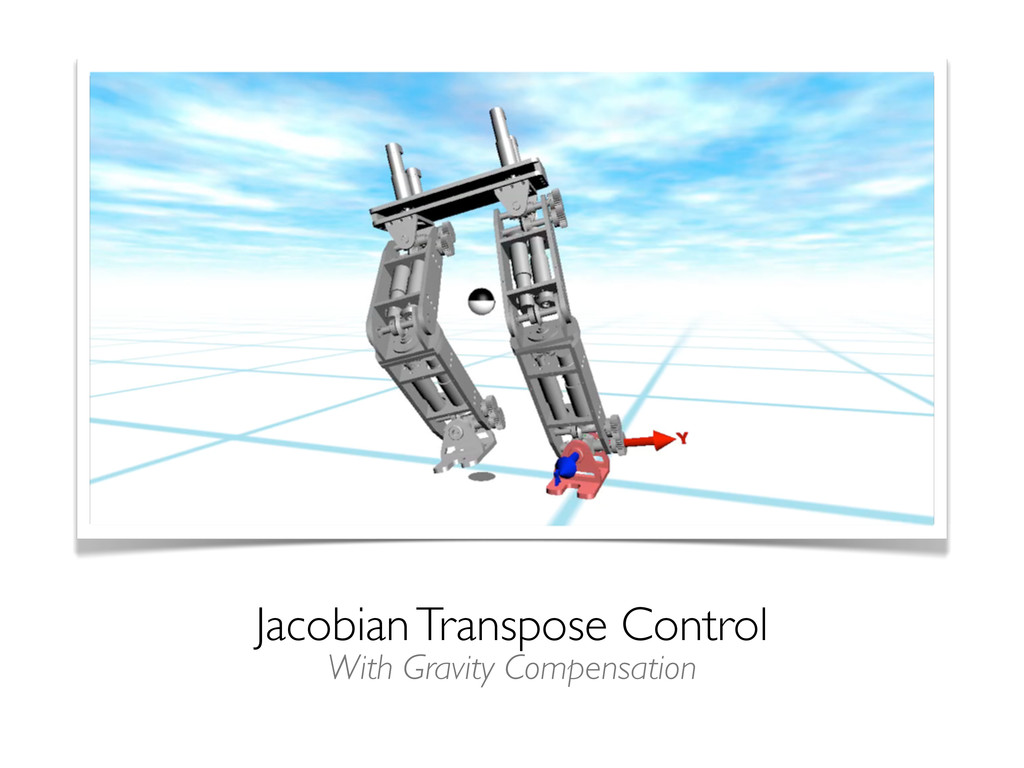
Jacobian Transpose Control With Gravity Compensation
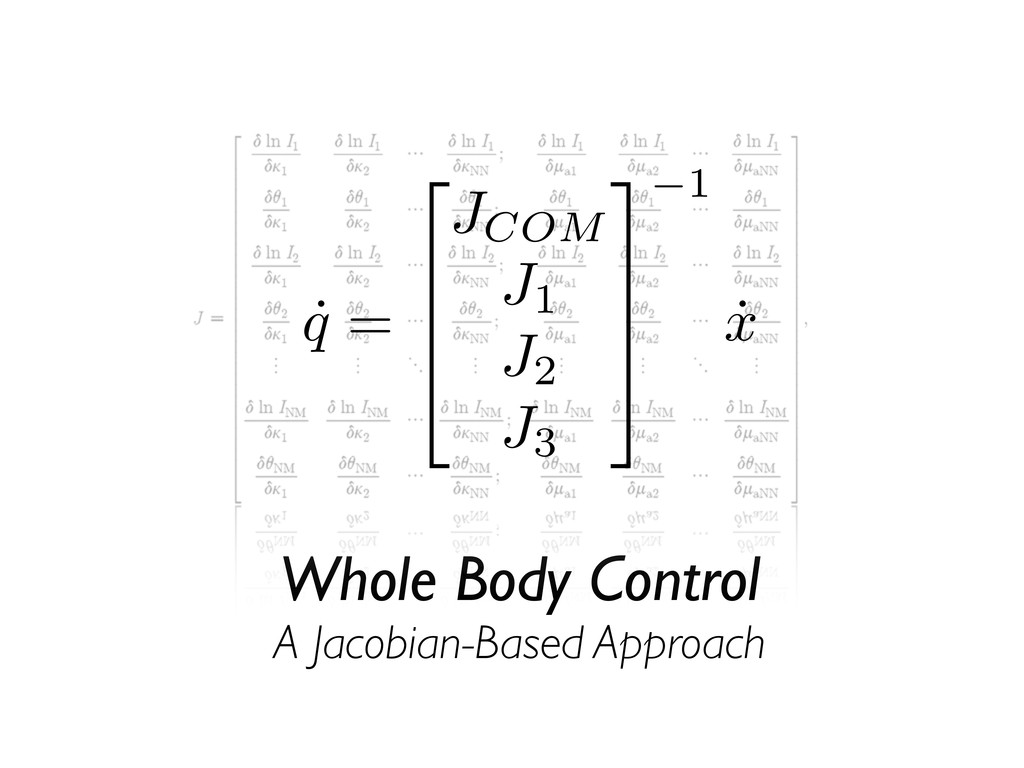
Whole Body Control A Jacobian-Based Approach ˙ q = 2
6 6 4 JCOM J1 J2 J3 3 7 7 5 1 ˙ x
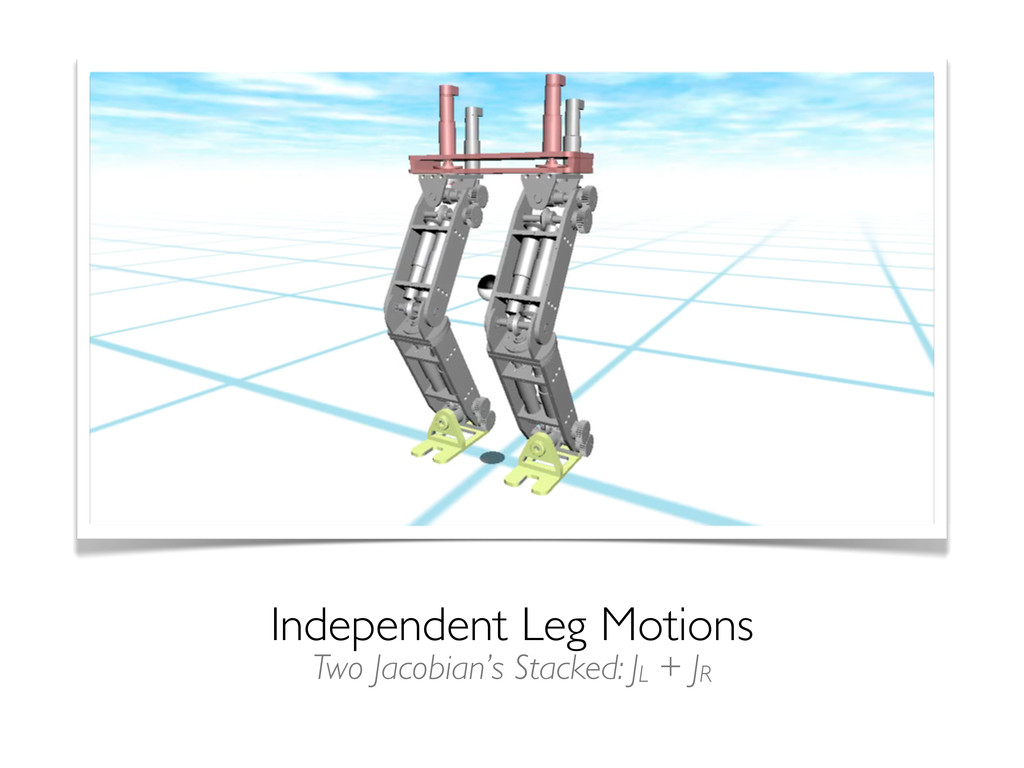
Independent Leg Motions Two Jacobian’s Stacked: JL + JR
Shifting Balance Three Jacobian’s Stacked: JCOM + JL + JR
Questions?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}