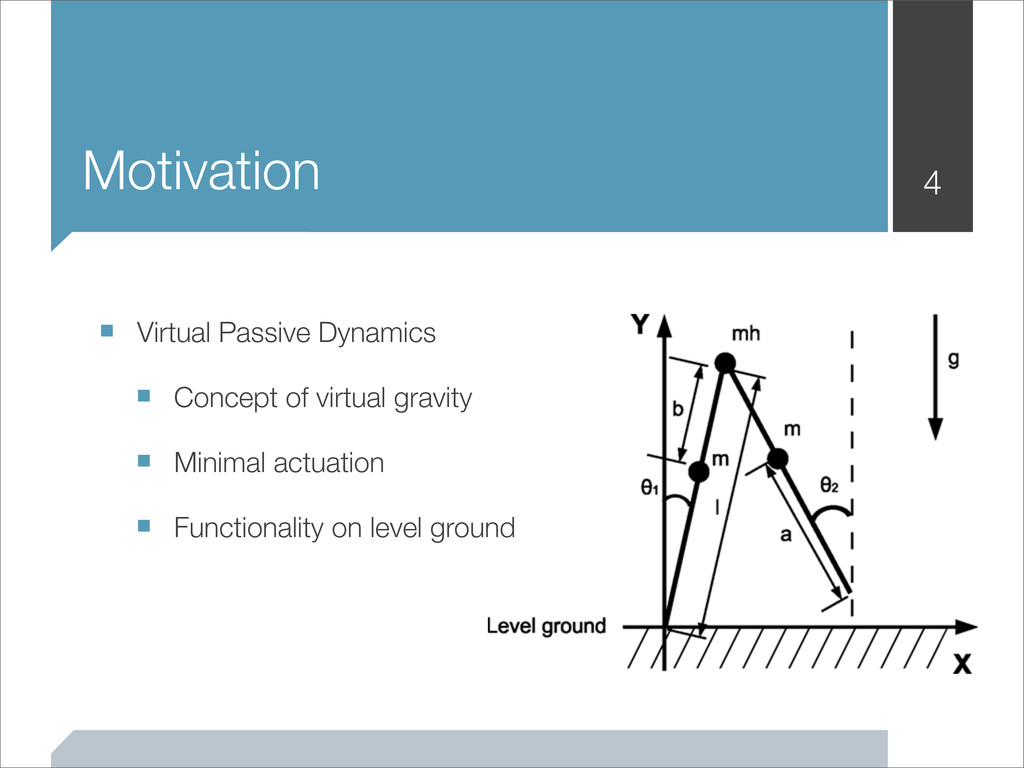
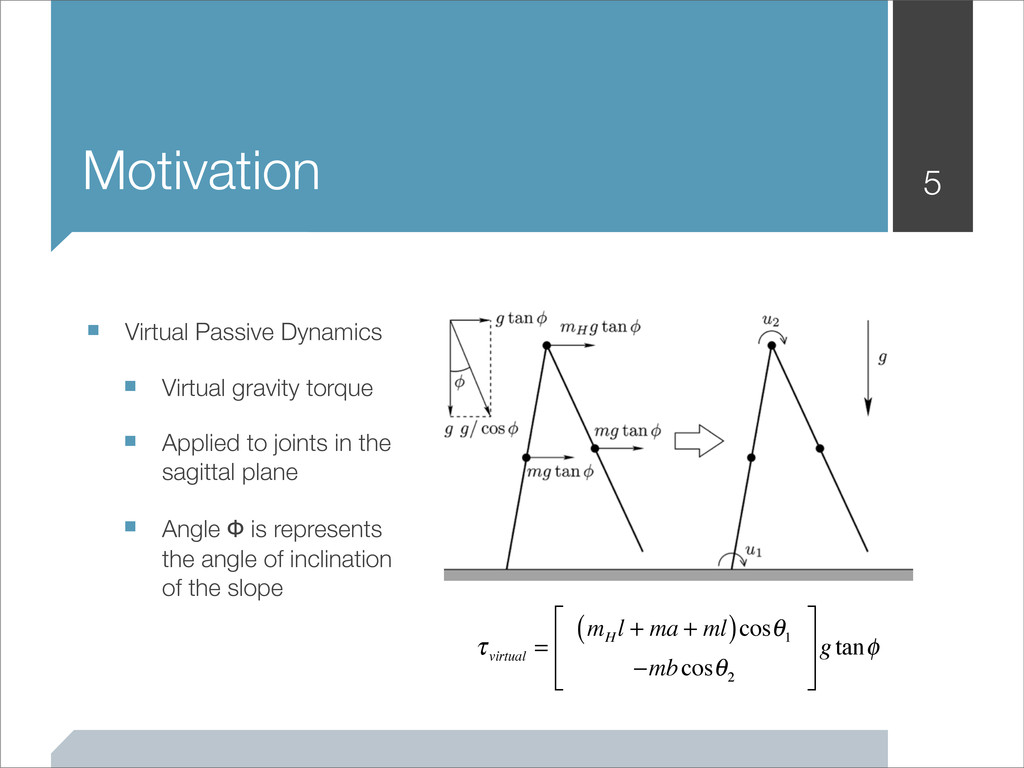
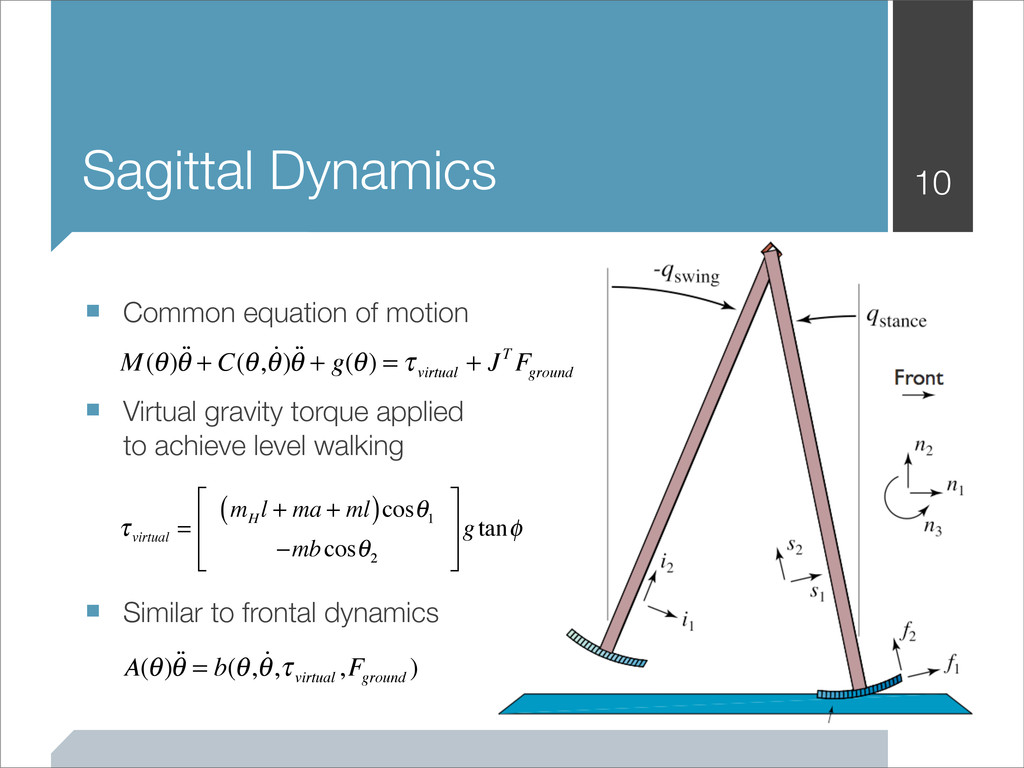
Applied to joints in the sagittal plane ▪ Angle Φ is represents the angle of inclination of the slope 5 τ virtual = m H l + ma + ml ( )cosθ 1 −mbcosθ 2 ⎡ ⎣ ⎢ ⎢ ⎤ ⎦ ⎥ ⎥ gtanφ
active powered locomotion (Kuo) ▪ Gait generation and control techniques (Asano) ▪ Energy constraint control (Asano) ▪ Use of semi-circular feet (Asano) 6
toolbox (RNE) ▪ Running into issues with contact model ▪ Currently writing my own forward dynamics routines ▪ Controller implemented in Matlab Simulink 11
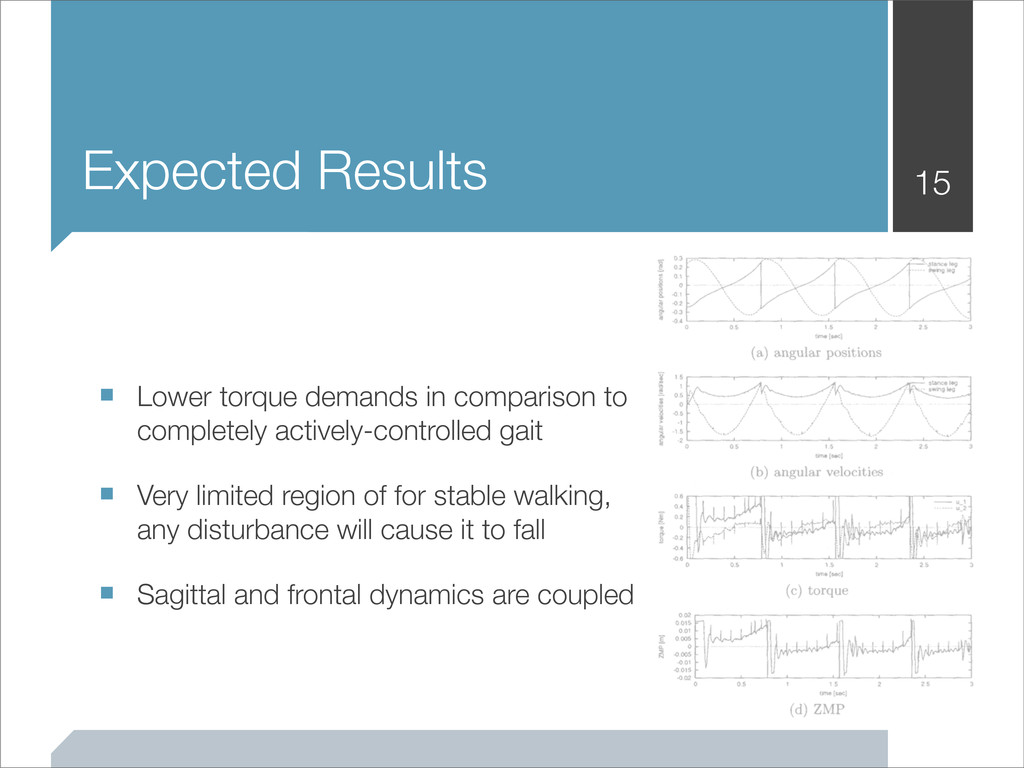
actively-controlled gait ▪ Very limited region of for stable walking, any disturbance will cause it to fall ▪ Sagittal and frontal dynamics are coupled 15
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}