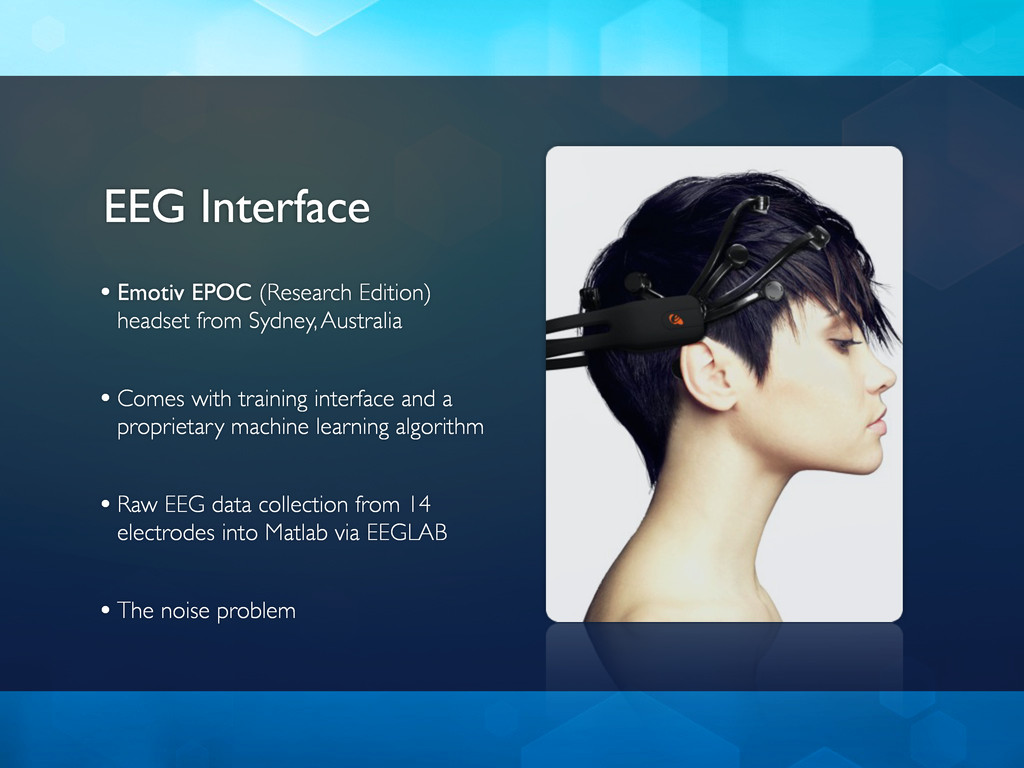
•Comes with training interface and a proprietary machine learning algorithm •Raw EEG data collection from 14 electrodes into Matlab via EEGLAB •The noise problem
- Forward, Backward, Turn Left, Turn Right & Neutral • Embed external sensory information in decision-making - Head orientation from gyroscope readings - Speed sensor readings from optical encoders • Supervised learning with a reasonably small training datasets - User should not have to provide 1000 examples of one action
of random variables, any finite number of which have a joint Gaussian distribution. • Completely specified by its mean and covariance functions: • Mathematically, a Gaussian Process is expressed by the following notation: µ(x) = E[ f (x)] ∑(x,x') = E[( f (x) − µ(x))( f (x') − µ(x'))] f (x) ~ GP(µ(x),∑(x,x'))
use kernel methods - Others include Support Vector Machines (SVM), Linear Discriminant Analysis (LDA), Principle Component Analysis (PCA), etc. • Can be used for regression and classification applications. - In this project, GPs are used to learn classification of motor movements (i.e. forward/backward) from EEG signals • Novelty: Exploiting the probabilistic output of GP classification - We can use the uncertainty in the predictions from GP coupled with other sensory information to improve decision making.
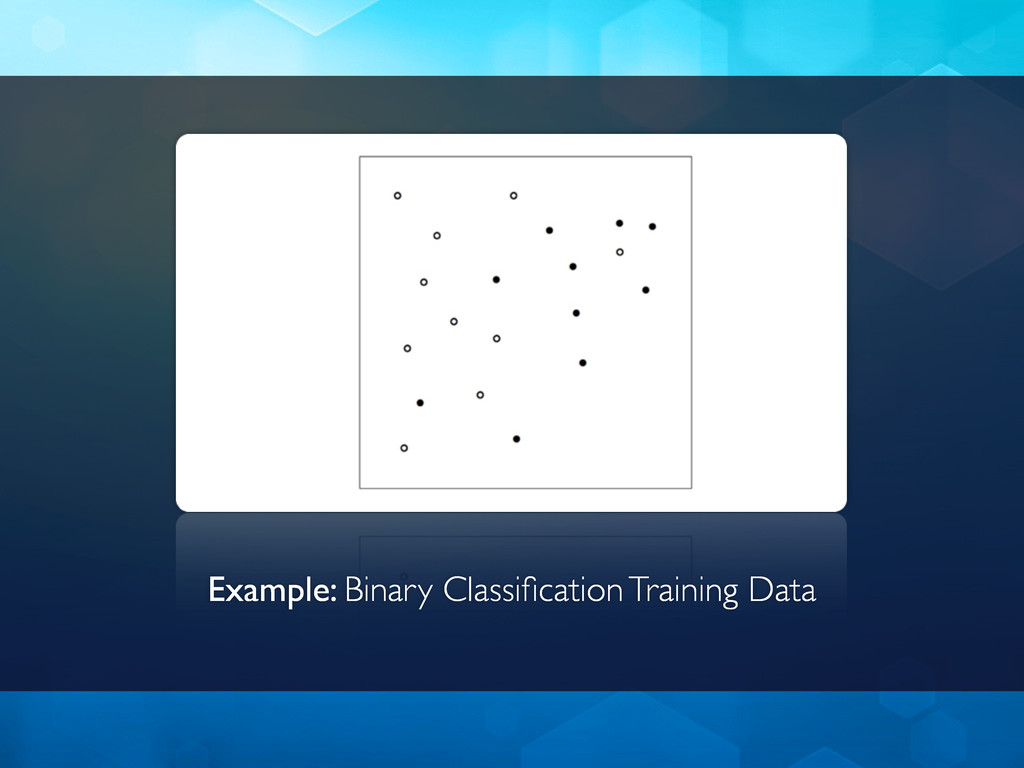
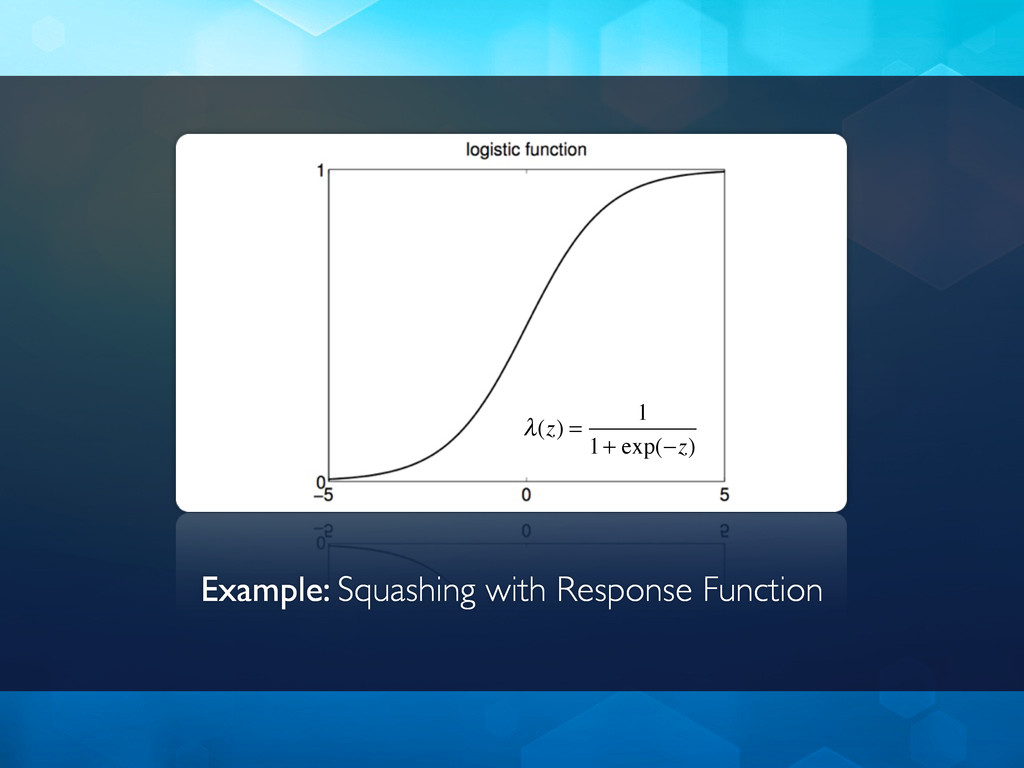
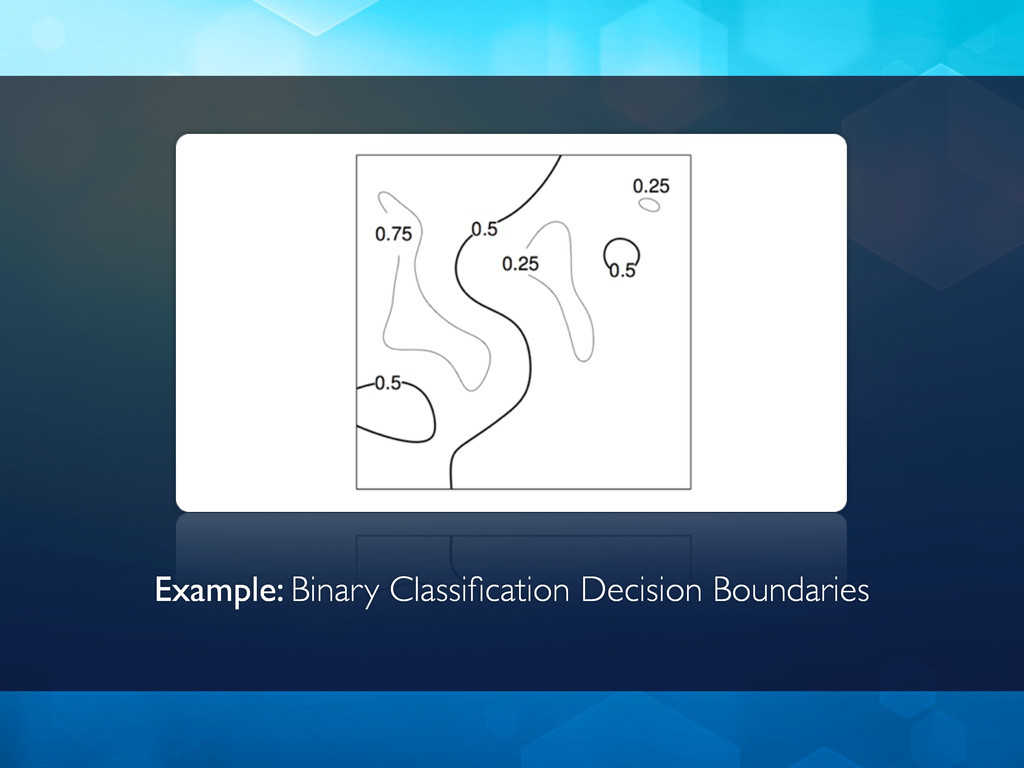
mapping is learned from training data using GP. • 1-D example illustrating the use of GP in regression - Assumption: Mean function centered at zero initially • 2-D example illustrating the use of GP in binary classification - Assumption: Use of logistic function for “squashing”
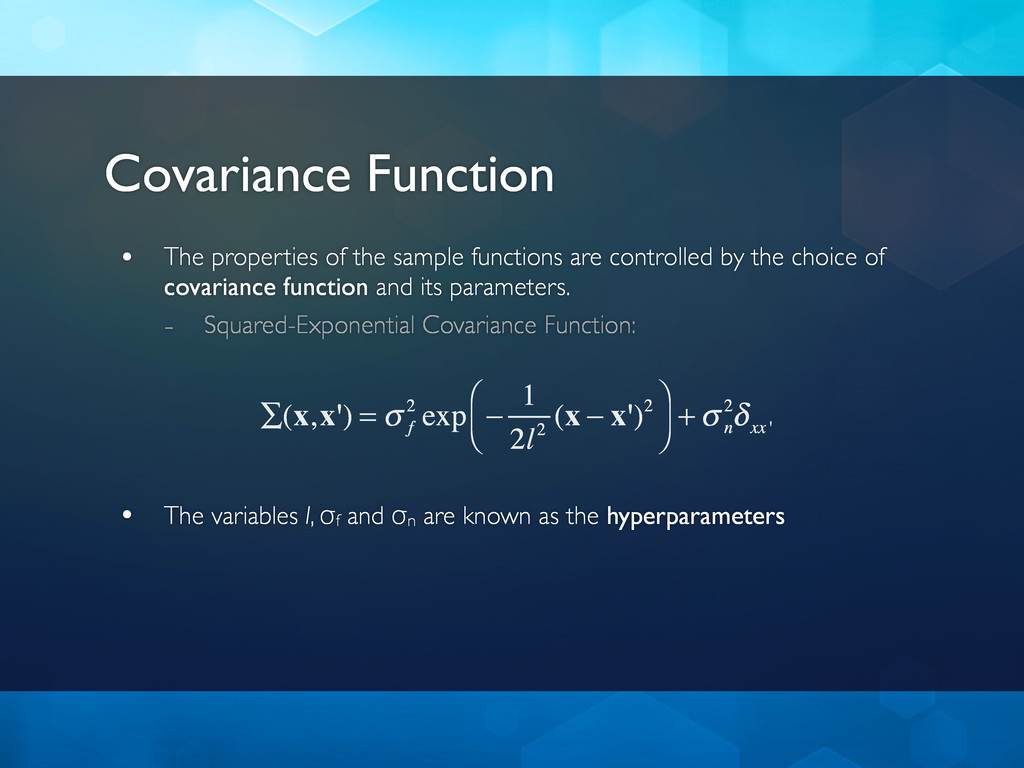
controlled by the choice of covariance function and its parameters. - Squared-Exponential Covariance Function: • The variables l, Мf and Мn are known as the hyperparameters ∑(x,x') = σ f 2 exp − 1 2l2 (x − x')2 ⎛ ⎝ ⎜ ⎞ ⎠ ⎟ + σ2 n δ xx '
on Emotiv EPOC headset - AF3, F7, F3, FC5, T7, P7, O1, O2, PB, TB, FC6, F4, F8, AF4 • Using Gaussian Processes for Machine Learning (GPML) toolbox - Available at http://www.gaussianprocess.org by Rasmussen et al. • Almost have binary classification working for neutral/forward with decision algorithm for incorporating gyroscopic data. - Key challenges: picking appropriate covariance function and hyperparameters to yield “decent” results.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}