少人数でラズパイIoTハンズオンをやらないかという声掛けがあり、自己啓発で習得した初歩的スキルを棚卸して簡単なハンズオン資料を作りました。
残念ながらコロナ禍でオフラインイベントが軒並み中止になり自然消滅しましたが、勤務先社内の有志と共有するためのハンズオン資料として構成しなおして勤務先に提供しました。
現在でも社内で不定期開催される入門講習のテキストとして利用しています。
2022.5.1追記
社内講習テキストの元となるAWS IoT設定まで含めた個人講習用テキストに置き換えます。OSバージョンとGUIが数世代前の情報になりますが自分が関わり始めた初期の参考資料としてこのまま残します。(現在はAWSCLIとSAMで簡単らくちんに実装しています)
対象:Python未経験者、プログラミング未経験者も可
所要時間:3~4日
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![2-3② rootfsのROM化解除 実行するコマンド #!/bin/sh if [ -e /mnt/boot-ro/config.txt ]; then](https://files.speakerdeck.com/presentations/83869cf0d3144d9884dbb187f2a377c2/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
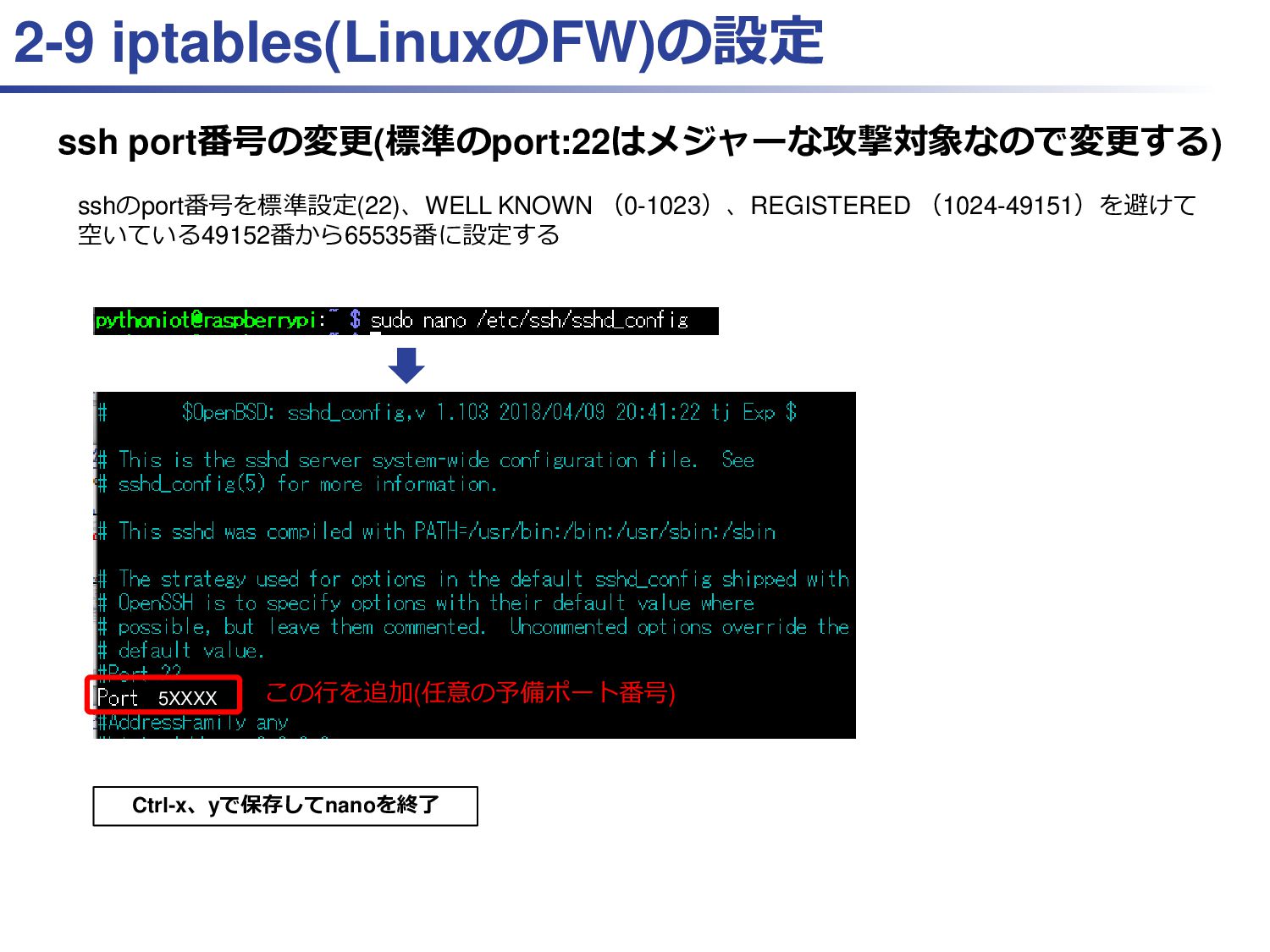
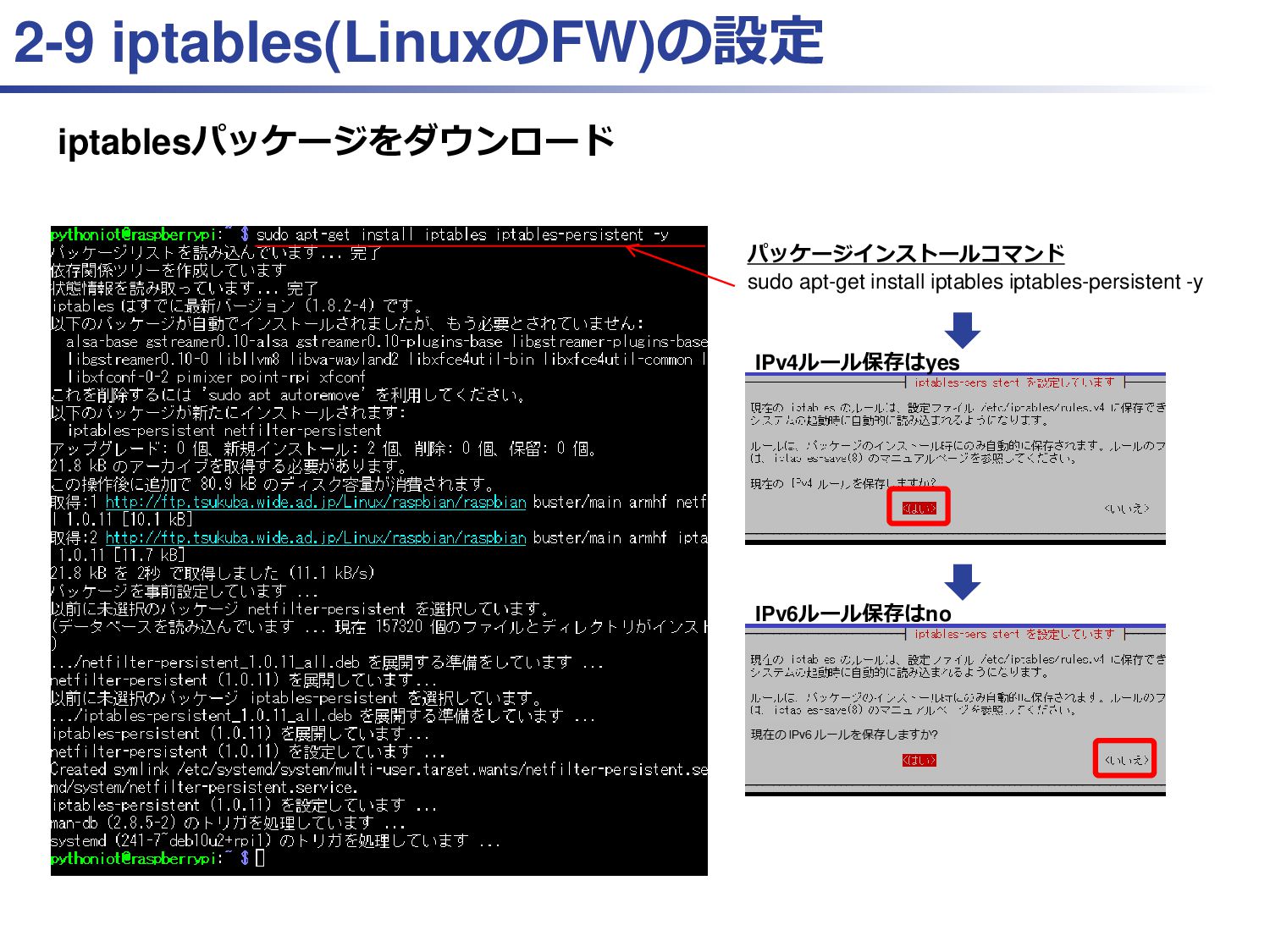
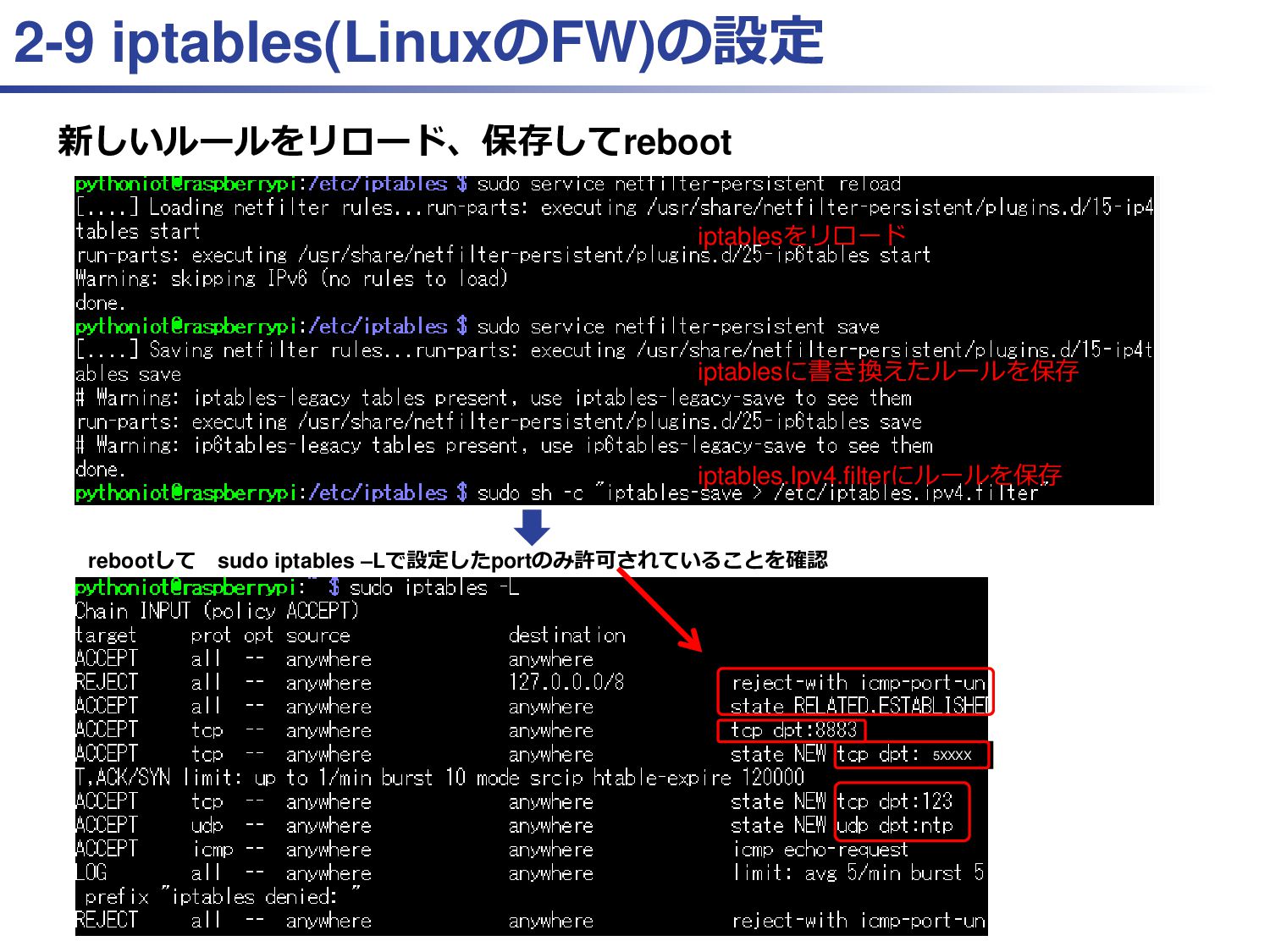
![2-9 iptables(LinuxのFW)の設定 IPv4のINPUTをローカルループ、MQTT、ssh、タイムサーバに限定する *filter :INPUT ACCEPT [0:0] :FORWARD ACCEPT [0:0]](https://files.speakerdeck.com/presentations/83869cf0d3144d9884dbb187f2a377c2/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
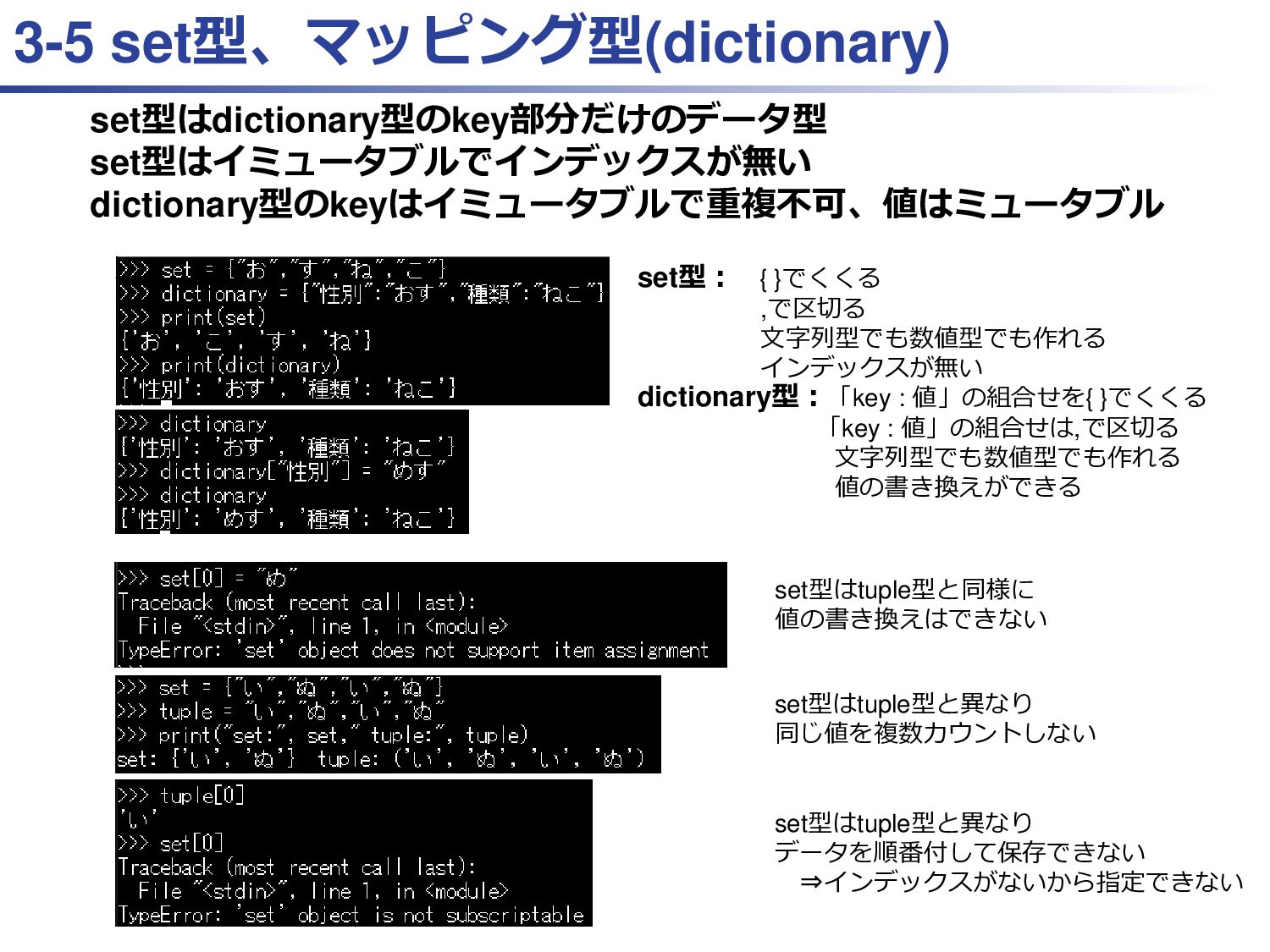
![3-4 シーケンス型(list型、tuple型) list型: [ ]でくくる ,で区切る 文字列型でも数値型でも作れる 値の書き換えができる tuple型:,で区切るだけ 文字列型でも数値型でも作れる](https://files.speakerdeck.com/presentations/83869cf0d3144d9884dbb187f2a377c2/slide_44.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}