Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Linuxのプロセススケジューラの歴史 v0.01~v2.4.x
Search
Satoru Takeuchi
PRO
January 29, 2022
Technology
580
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Linuxのプロセススケジューラの歴史 v0.01~v2.4.x
以下動画のテキストです。
https://youtu.be/iPlcotf6It4
Satoru Takeuchi
PRO
January 29, 2022
More Decks by Satoru Takeuchi
See All by Satoru Takeuchi
Machine Check Exception
sat
PRO
2
37
バイナリダンプの模様を読む
sat
PRO
0
68
cpコマンドはディスク上でデータを コピーしないことがある
sat
PRO
3
54
114-ファイルのshallow_copy.pdf
sat
PRO
2
38
113-Btrfsのスナップショット.pdf
sat
PRO
0
16
システム強制終了時にファイルシステムの整合性を保つ~ コピーオンライト編 ~
sat
PRO
0
59
システム強制終了時に ファイルシステムの整合性を保つ ~ ジャーナリング編 ~
sat
PRO
2
63
ファイルシステムの整合性を回復するfsck
sat
PRO
1
65
小学校5,6年生向けキャリア教育 大人になるまでの道
sat
PRO
8
5.3k
Other Decks in Technology
See All in Technology
第67回コンピュータビジョン勉強会CVPR2026読会前編
tsukamotokenji
0
150
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
430
変更し続けられるシステムをどう保つか — AI時代のSSoTという設計原則
kawauso
0
220
GoでCコンパイラを作った話
repunit
0
120
知らん間に、回ってる
ming_ayami
0
740
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
4
2.4k
ZOZOTOWNの進化と信頼性を両立する負荷試験
zozotech
PRO
2
280
DatabricksにおけるMCPソリューション
taka_aki
1
280
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
240
壊して学ぶAWS CDK: そのcdk deployで消えるもの、残るもの
k_adachi_01
1
420
Gen3R: 3D Scene Generation Meets Feed-Forward Reconstruction
spatial_ai_network
0
140
CSに"SLO"は要らない、経営層に"99.9%"は伝わらない - SREを全社に"翻訳"する3原則
cscengineer
PRO
1
5.2k
Featured
See All Featured
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.7k
4 Signs Your Business is Dying
shpigford
187
22k
Deep Space Network (abreviated)
tonyrice
0
230
Art, The Web, and Tiny UX
lynnandtonic
304
22k
JAMstack: Web Apps at Ludicrous Speed - All Things Open 2022
reverentgeek
1
500
Information Architects: The Missing Link in Design Systems
soysaucechin
0
1k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
490
世界の人気アプリ100個を分析して見えたペイウォール設計の心得
akihiro_kokubo
PRO
72
40k
Rails Girls Zürich Keynote
gr2m
96
14k
Highjacked: Video Game Concept Design
rkendrick25
PRO
1
410
Technical Leadership for Architectural Decision Making
baasie
3
440
Testing 201, or: Great Expectations
jmmastey
46
8.2k
Transcript
Linuxのプロセススケジューラの歴史 v0.01~v2.4.x Jan. 29th, 2022 Satoru Takeuchi Twitter: satoru_takeuchi 1
はじめに • Linuxカーネル(以下カーネル)のプロセススケジューラの歴史を振り返る • 対象バージョン: 最初のリリースv0.01からv2.4.xまで • 用語 ◦ タスク:
カーネルのスケジューリング単位。プロセスあるいはスレッド ◦ LCPU: カーネルがCPUとして認識するもの(物理CPU or コア or スレッド) ◦ Current: LCPU上で現在動作中のタスク 2
V0.01: 概要 • 超絶シンプルなラウンドロビンスケジューリング ◦ コア部分は20行弱 • タスクを管理する配列がそのままランキュー ◦ 長さは64:
つまりタスクは最大でも 64 ◦ 空要素にはnilが入る • タイムスライスは固定150[ms] ◦ インターバルタイマーの 1tickは10[ms] ◦ のちにタイムスライスはコロコロ変わるが、あまり重要じゃないので省略 • currentのタイムスライス切れ or 全タスクがsleepならスケジューラを呼ぶ 3
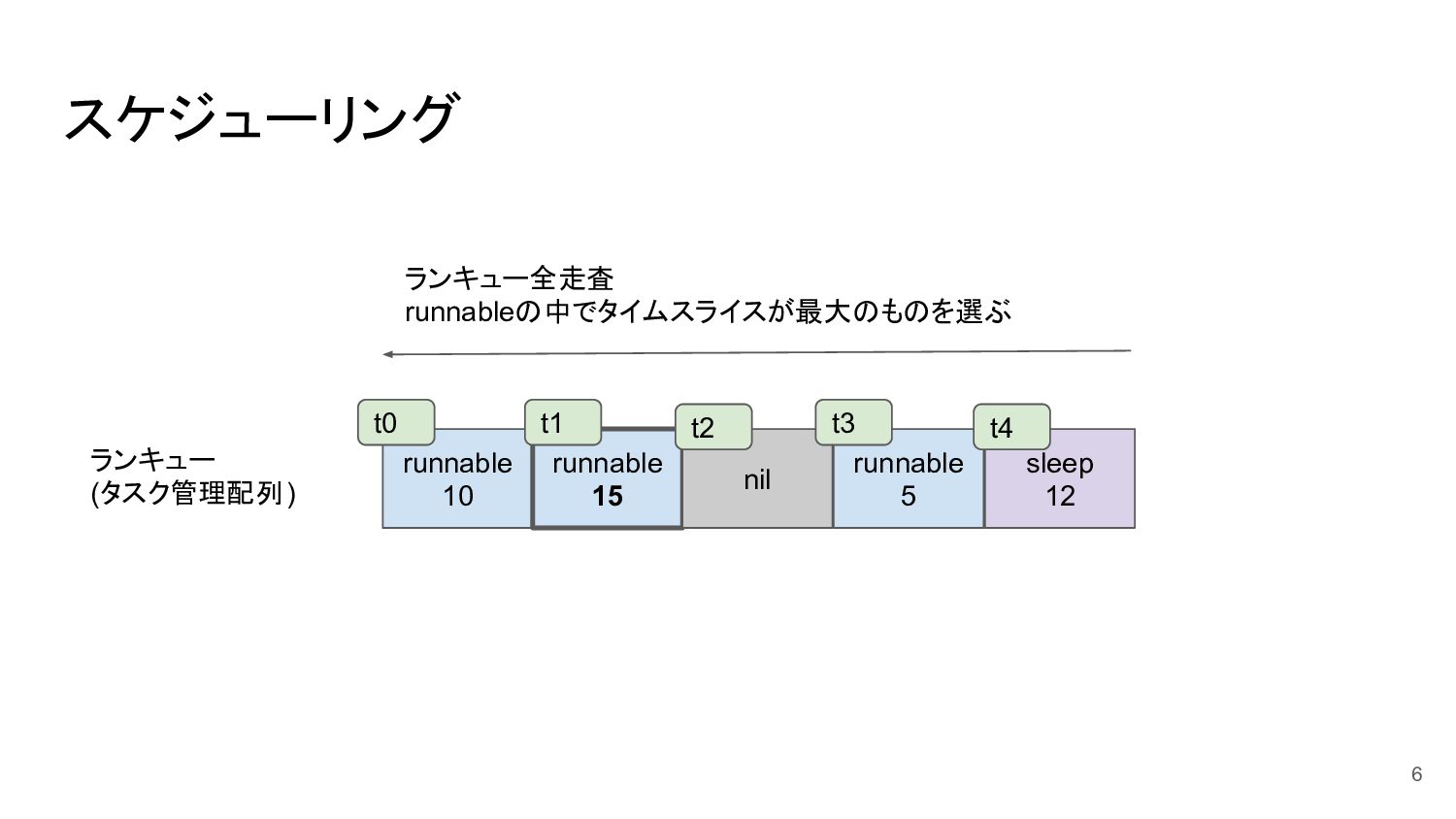
V0.01: スケジューリングアルゴリズム • ランキューを全走査して残りタイムスライスが最大のものを次に動かす • 該当者がいなければ全タスクのタイムスライスをリセット ◦ タイムスライスが切れているプロセスには 150[ms]与える ◦
スリープ中のタスクには残りタイムスライス /2をボーナスとして与える ▪ 寝起きを繰り返すbashなどを起床時に優先的に動作させる仕組み (多分) 4
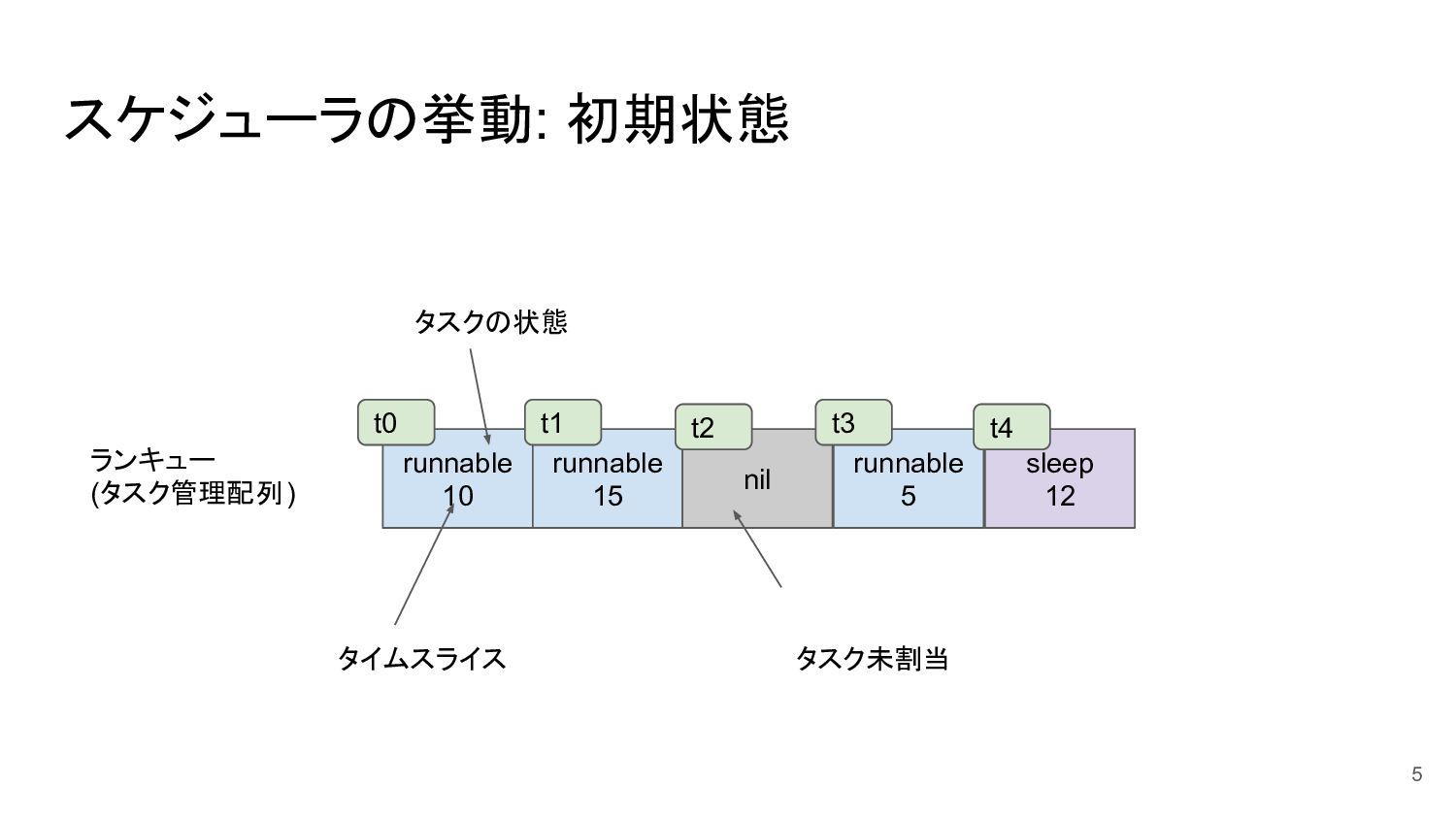
スケジューラの挙動: 初期状態 5 runnable 10 runnable 15 nil runnable 5
ランキュー (タスク管理配列) sleep 12 タイムスライス タスク未割当 タスクの状態 t0 t1 t2 t3 t4
スケジューリング 6 runnable 10 runnable 15 nil runnable 5 ランキュー
(タスク管理配列) sleep 12 ランキュー全走査 runnableの中でタイムスライスが最大のものを選ぶ t0 t1 t2 t3 t4
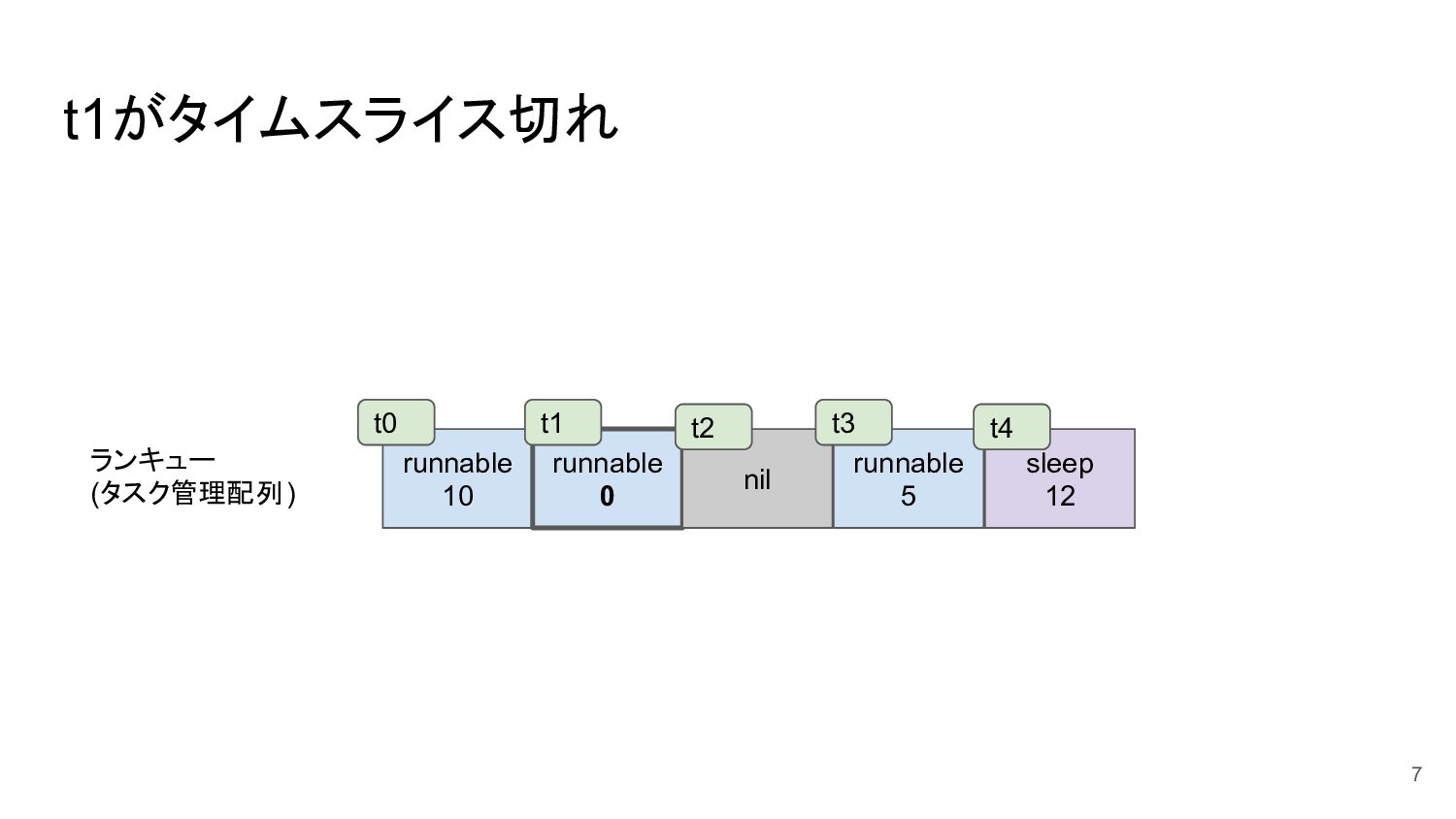
t1がタイムスライス切れ 7 runnable 10 runnable 0 nil runnable 5 ランキュー
(タスク管理配列) sleep 12 t0 t1 t2 t3 t4
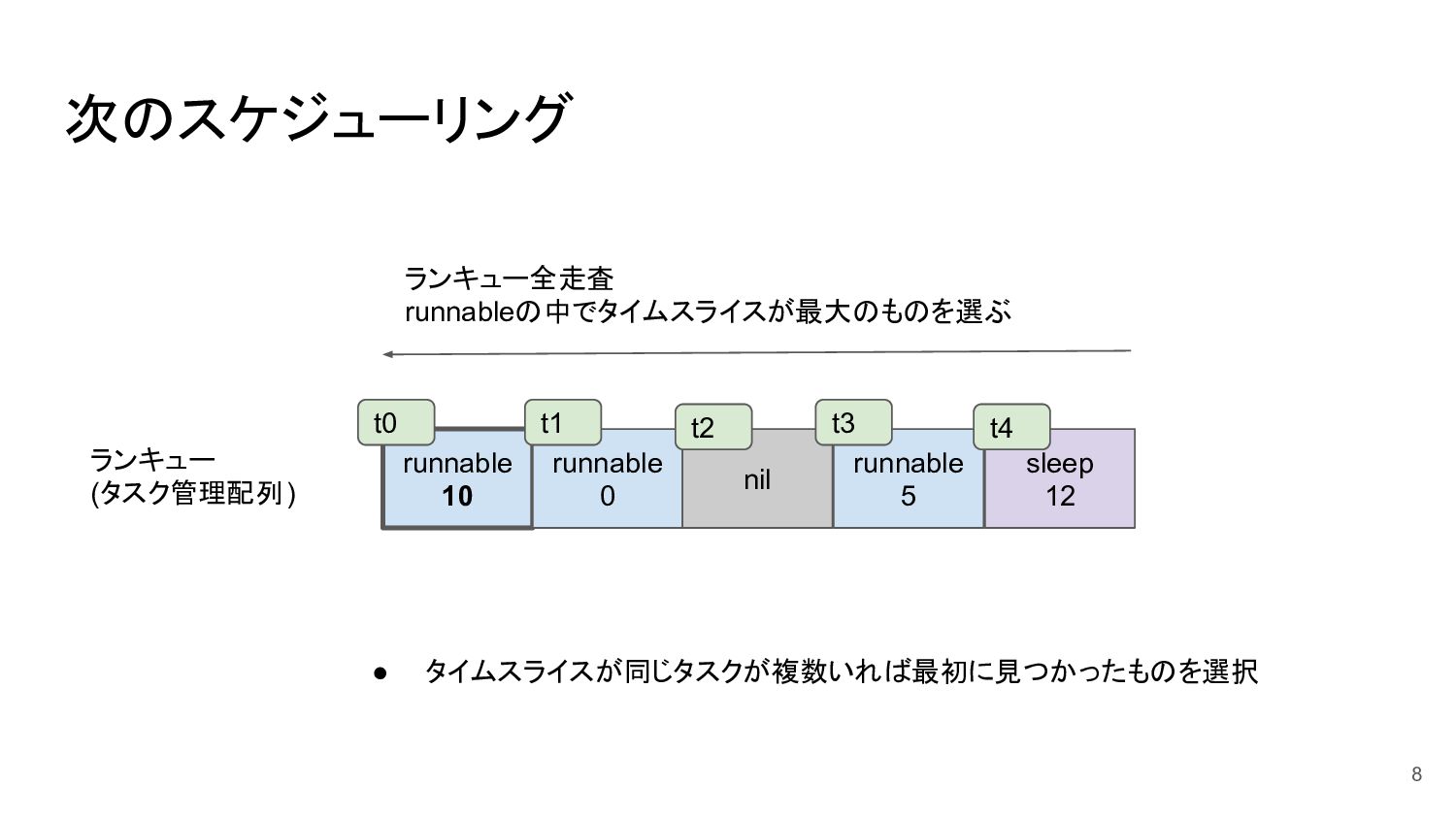
次のスケジューリング 8 runnable 10 runnable 0 nil runnable 5 ランキュー
(タスク管理配列) sleep 12 ランキュー全走査 runnableの中でタイムスライスが最大のものを選ぶ • タイムスライスが同じタスクが複数いれば最初に見つかったものを選択 t0 t1 t2 t3 t4
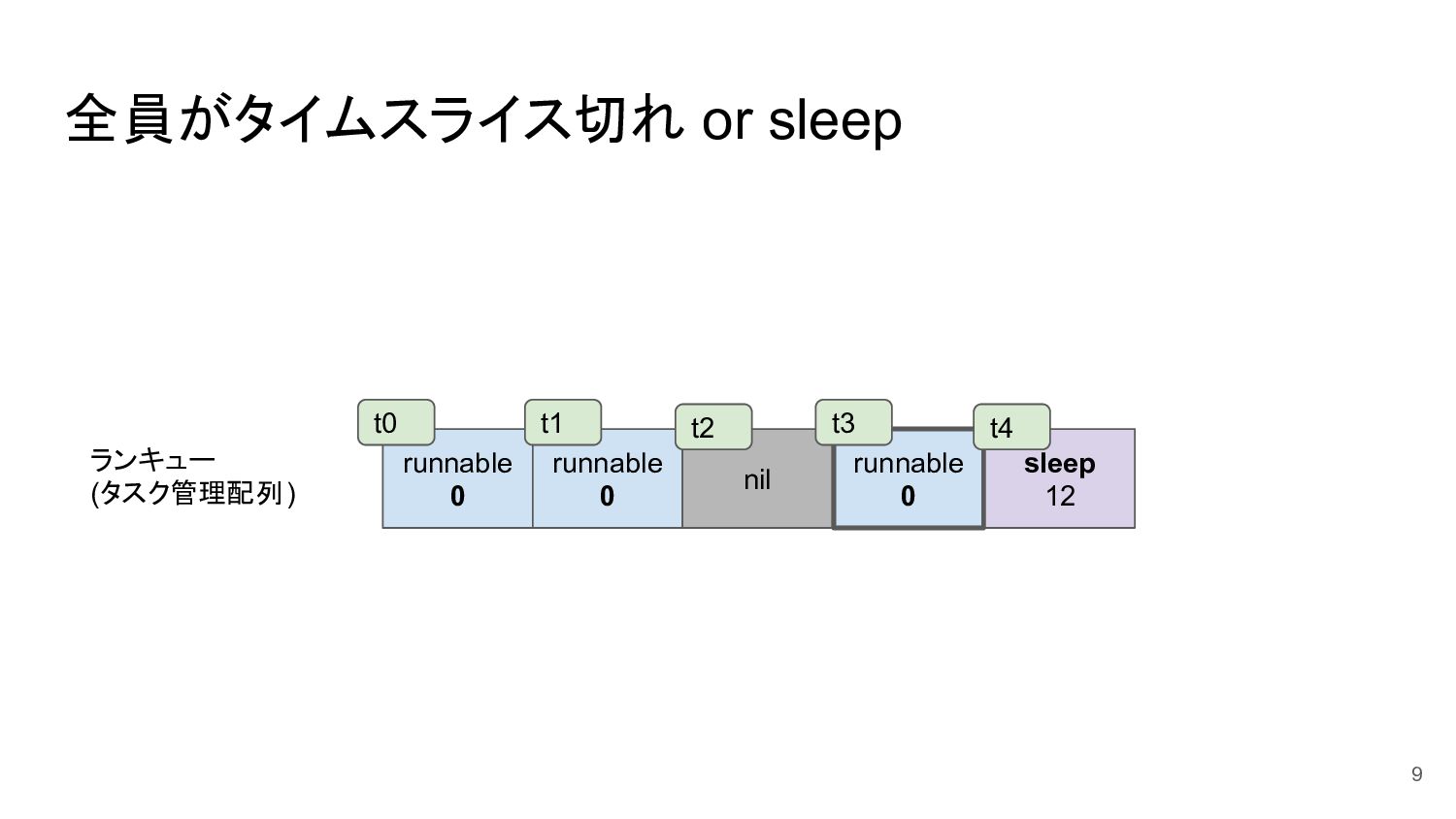
全員がタイムスライス切れ or sleep 9 runnable 0 runnable 0 nil runnable
0 ランキュー (タスク管理配列) sleep 12 t0 t1 t2 t3 t4
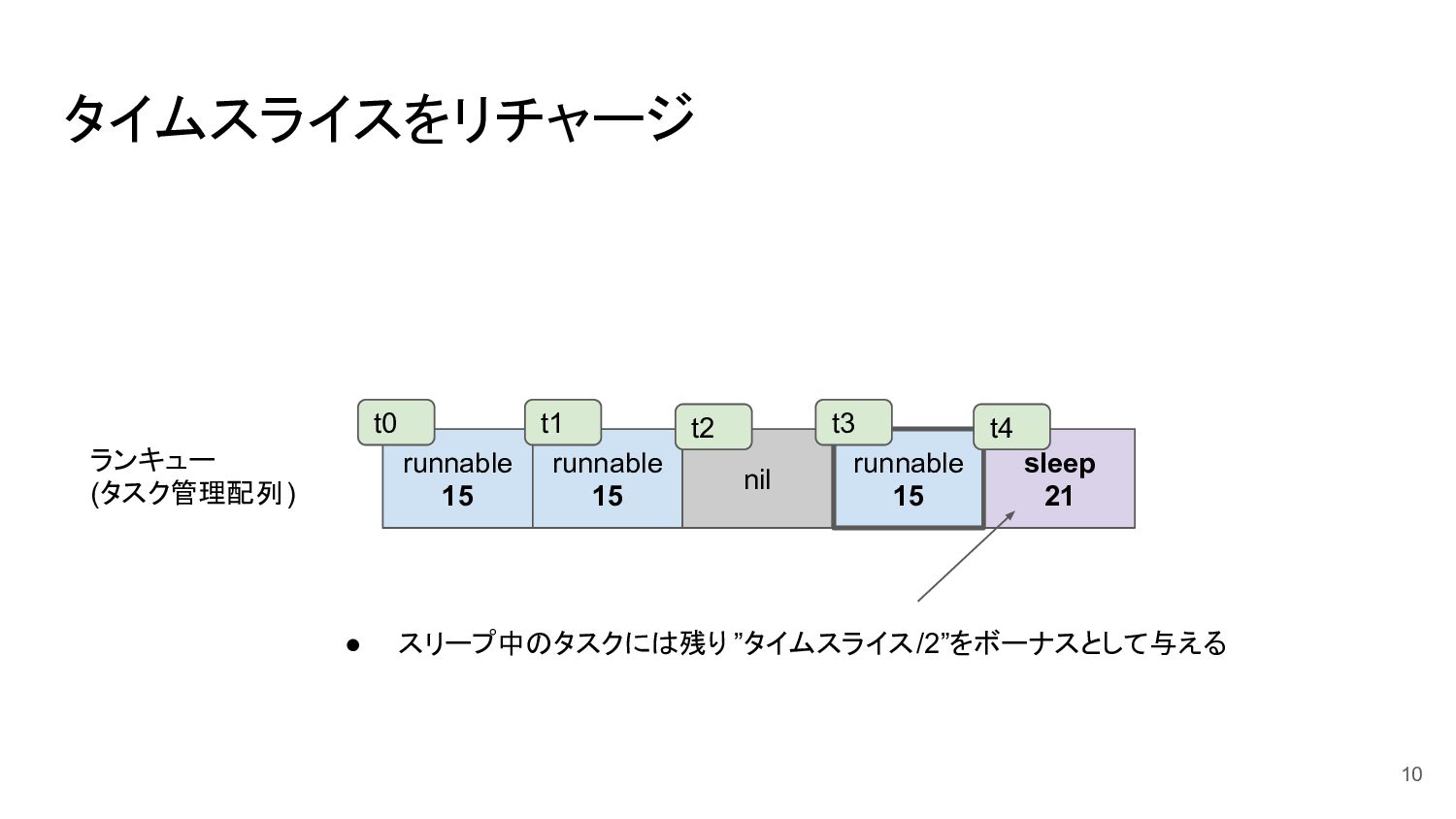
タイムスライスをリチャージ 10 runnable 15 runnable 15 nil runnable 15 ランキュー
(タスク管理配列) sleep 21 • スリープ中のタスクには残り ”タイムスライス/2”をボーナスとして与える t0 t1 t2 t3 t4
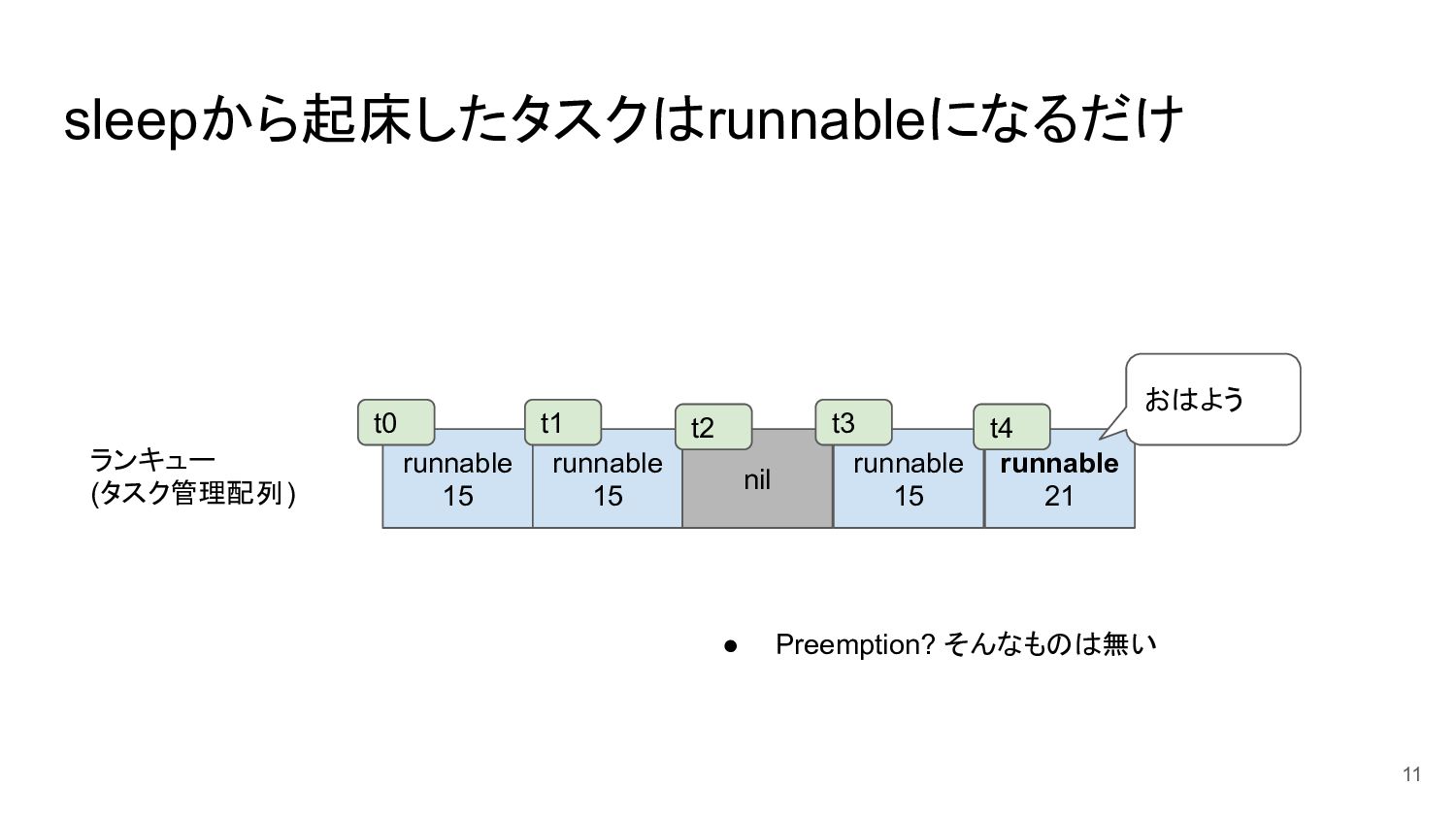
sleepから起床したタスクはrunnableになるだけ 11 runnable 15 runnable 15 nil runnable 15 ランキュー
(タスク管理配列) runnable 21 t0 t1 t2 t3 t4 おはよう • Preemption? そんなものは無い
V0.01: その他 • Nice値 ◦ 変更するとタイムスライスが増減 ◦ rootでなくてもマイナス値を設定可能 ◦ 任意の値を設定可能
▪ 例: nice値-10,000 => タイムスライスは100,150[ms] ◦ 絶対値を指定できない : setpriority()システムコールは無い • タスク == プロセス。カーネル内でスレッドを扱えない 12
v1.0 • Preemptionの導入 ◦ 条件: sleepから起床したタスクのタイムスライス > currentのタイムスライス • Nice値の扱いがまともになる
◦ Rootでないとマイナス値を設定できなくなる ◦ nice値は-19~20の間のみ意味を持つようになる ◦ Nice値の絶対値を指定可能に : {set,get}priority()システムコールが追加 13
v2.0 • ランキューのデータ構造がリストに • SMP対応 • リアルタイムポリシーの追加 14
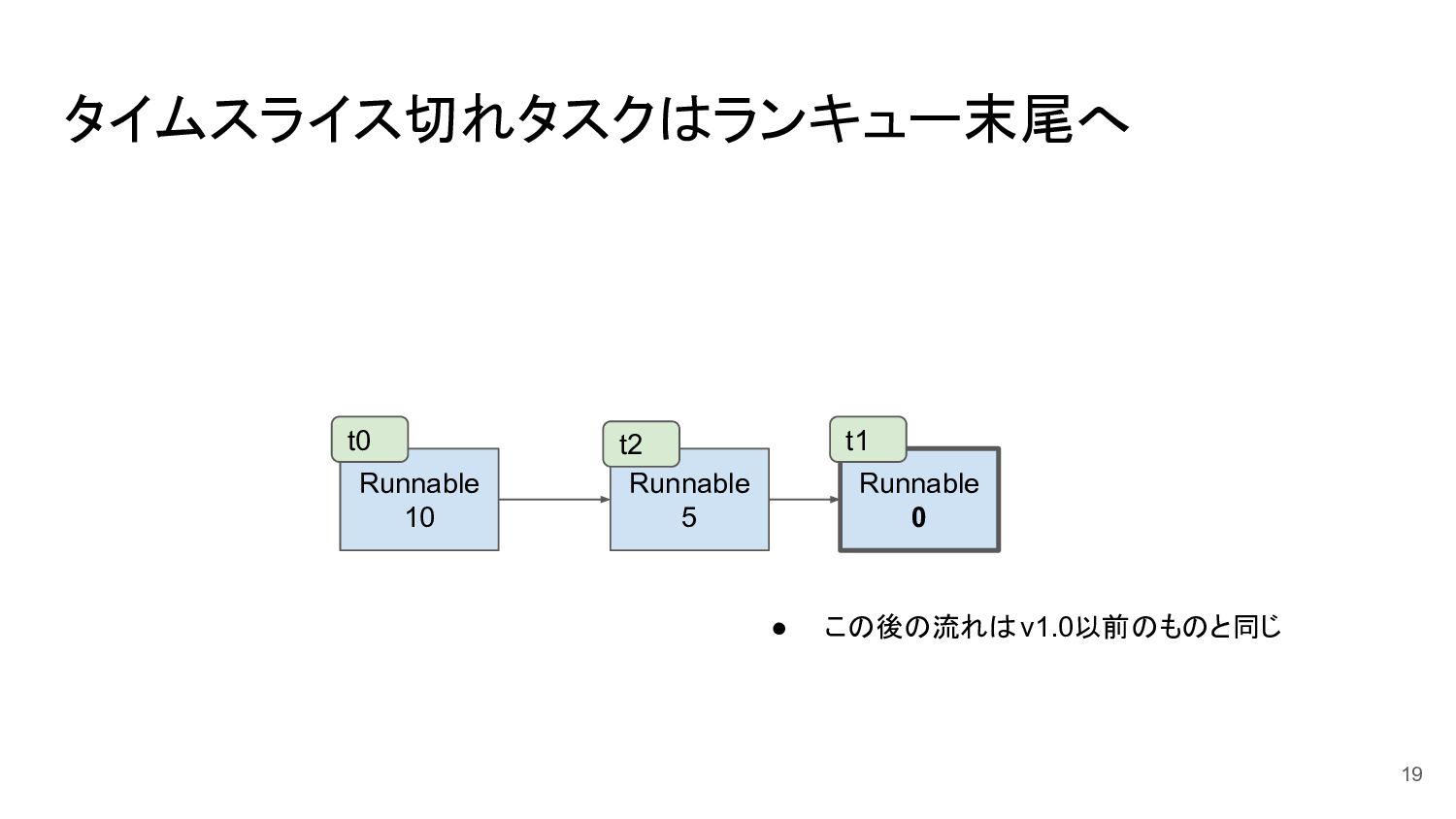
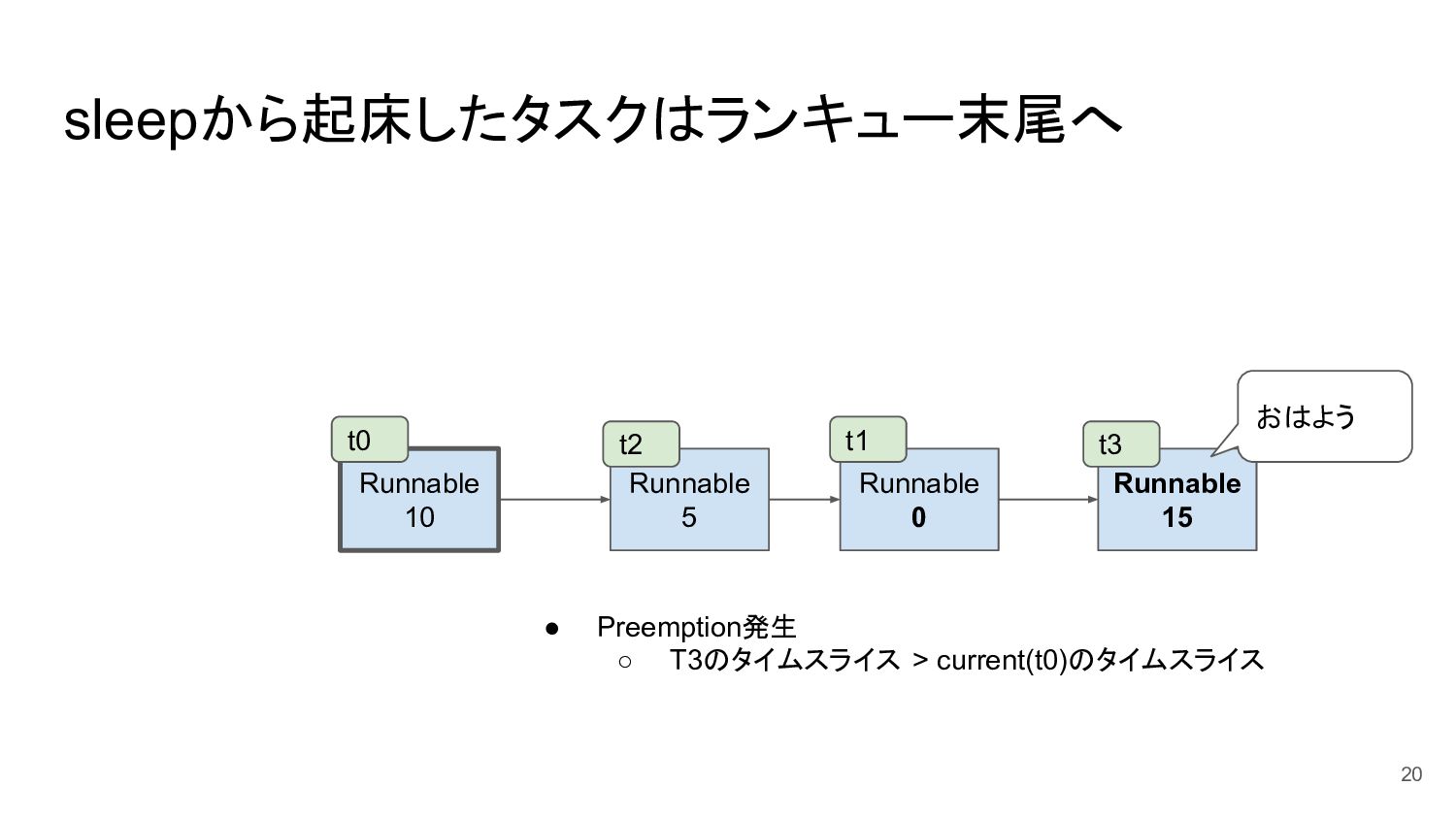
ランキューデータ構造がリストに • スケジューリングアルゴリズム ◦ ランキューからタイムスライスが最大のタスクをとってくる • タイムスライスを使い果たすとランキュー末尾に挿入 • 生成直後&sleep起床時のタスクもランキュー末尾に挿入 •
ランキューへのタスク挿入時にソートしない ◦ スケジューリング処理の計算量は O(n): nはrunnableタスクの数 15
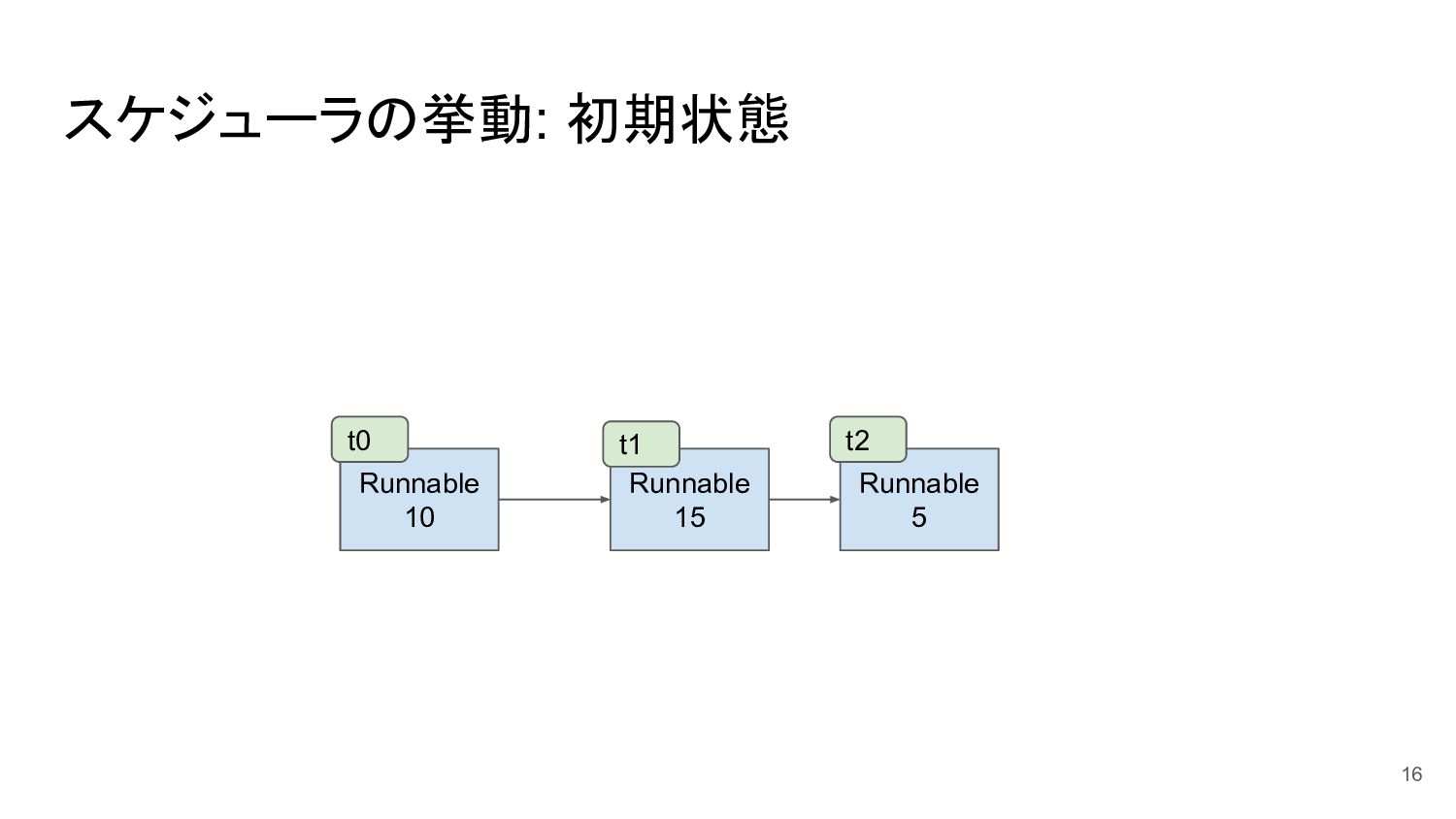
スケジューラの挙動: 初期状態 16 Runnable 10 Runnable 15 Runnable 5 t0
t1 t2
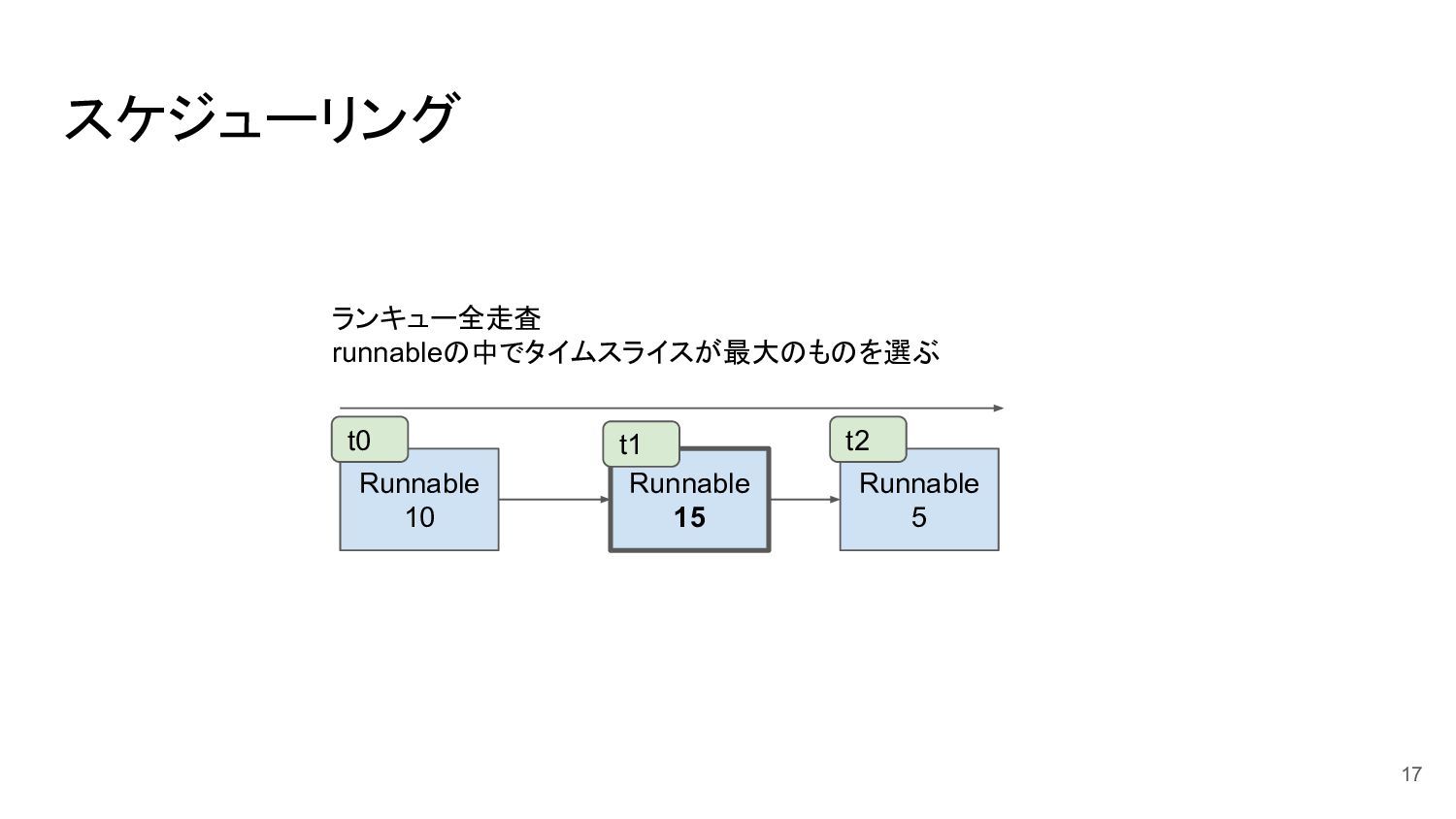
スケジューリング 17 Runnable 10 Runnable 15 Runnable 5 ランキュー全走査 runnableの中でタイムスライスが最大のものを選ぶ
t0 t1 t2
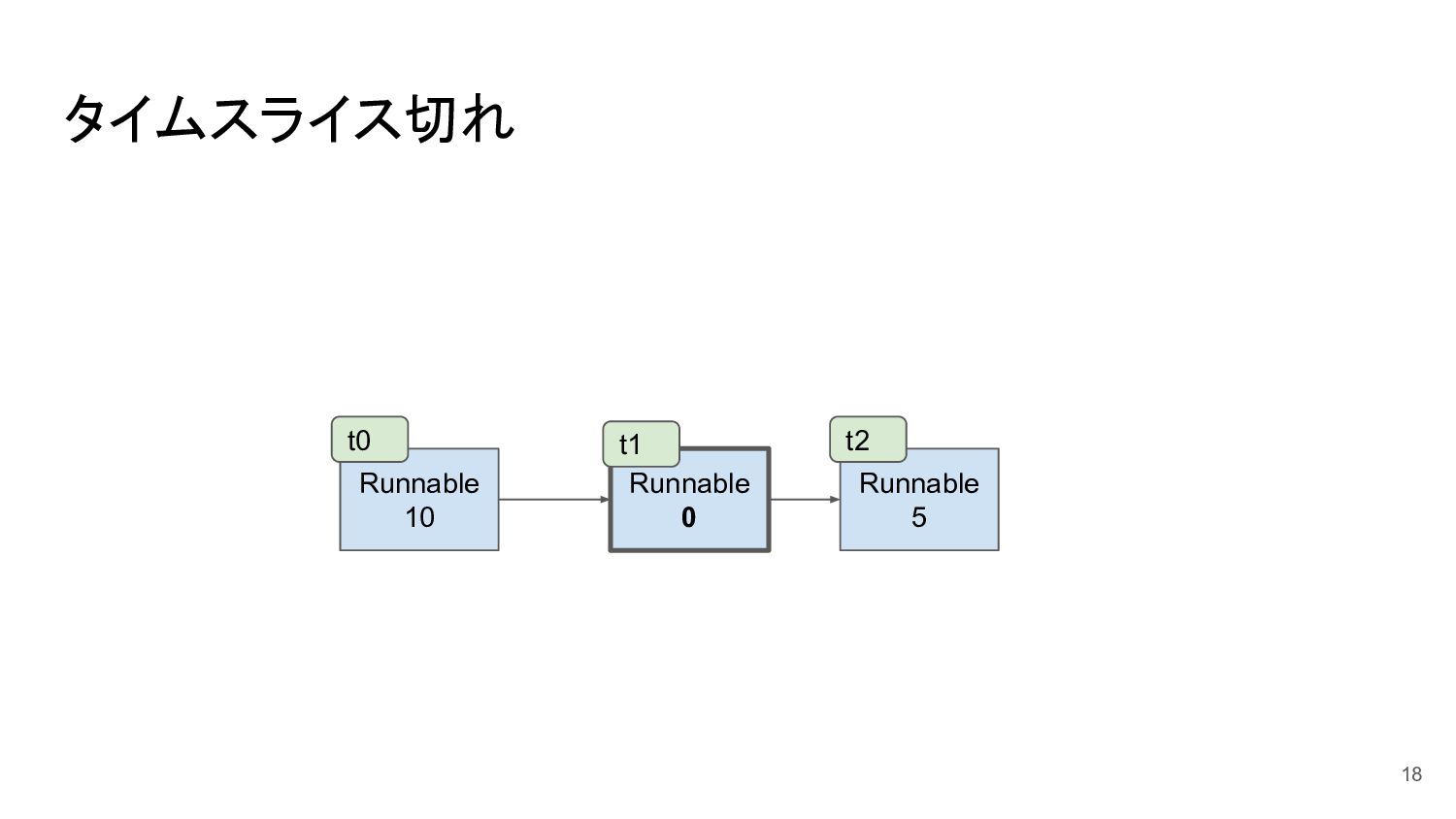
タイムスライス切れ 18 Runnable 10 Runnable 0 Runnable 5 t0 t1
t2
タイムスライス切れタスクはランキュー末尾へ 19 Runnable 10 Runnable 5 Runnable 0 • この後の流れはv1.0以前のものと同じ
t0 t2 t1
sleepから起床したタスクはランキュー末尾へ 20 Runnable 10 Runnable 5 Runnable 0 Runnable 15
t0 t2 t1 t3 おはよう • Preemption発生 ◦ T3のタイムスライス > current(t0)のタイムスライス
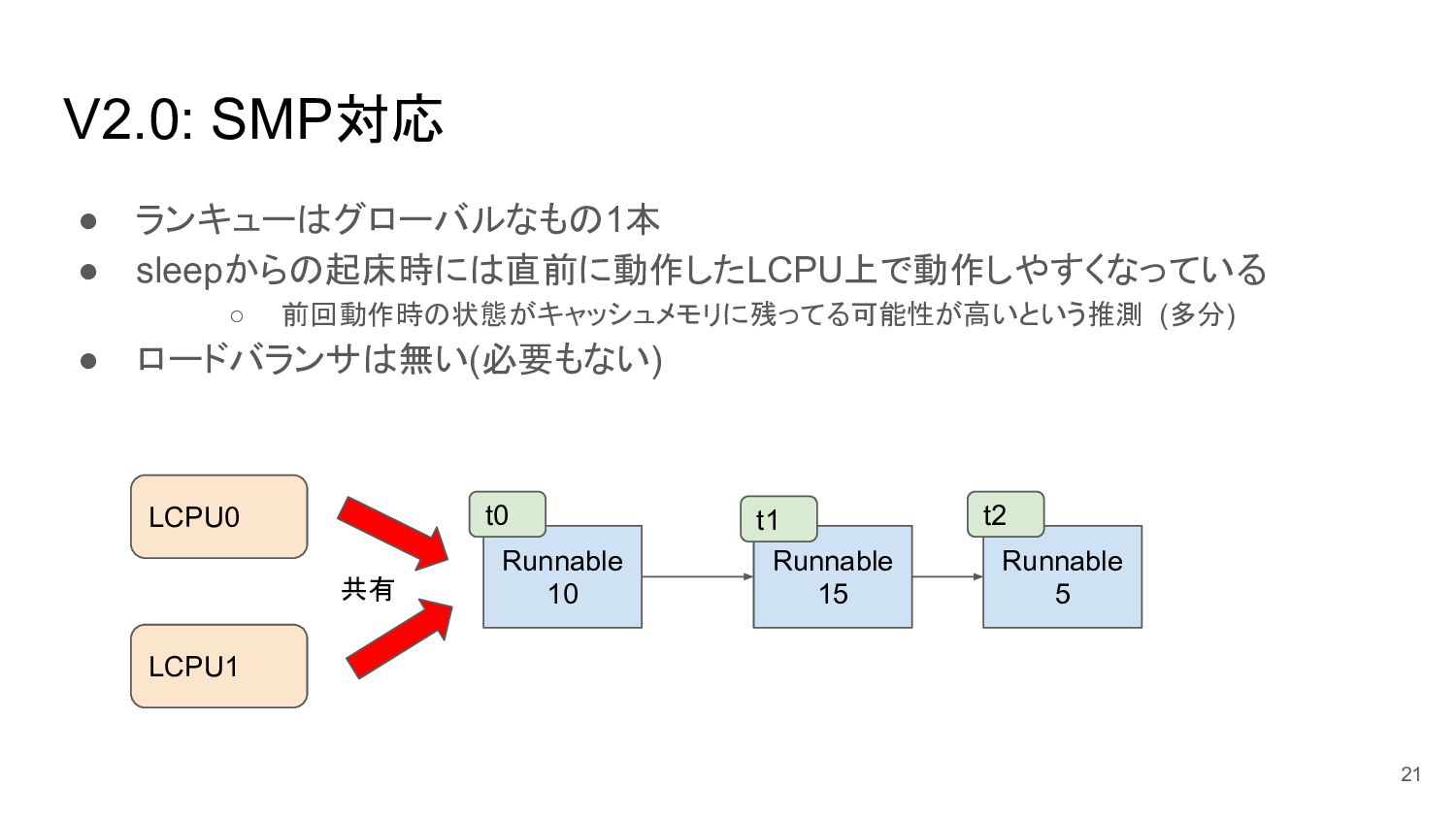
V2.0: SMP対応 • ランキューはグローバルなもの1本 • sleepからの起床時には直前に動作したLCPU上で動作しやすくなっている ◦ 前回動作時の状態がキャッシュメモリに残ってる可能性が高いという推測 (多分) •
ロードバランサは無い(必要もない) 21 LCPU0 LCPU1 Runnable 10 Runnable 15 Runnable 5 共有 t0 t1 t2
リアルタイムポリシーの追加 • タスクをリアルタイムタスクにできる ◦ 通常のタスク(SCHED_OTHERポリシー)より常に優先的に動作可能 ◦ 用途: ハートビート処理など (1秒ごとに起動して通信してすぐ寝る、など )
• 二種類ある ◦ SCHED_FIFOポリシー: タイムスライスなし。ここではこちらのみ扱う ◦ SCHED_RRポリシー: タイムスライスあり • sched_setscheduler()システムコールやchrtコマンドによって設定 ◦ rootのみ設定可能 22
スケジューラの挙動: 初期状態 23 Runnable OTHER 10 Runnable FIFO -- Runnable
FIFO -- t0 t1 t2
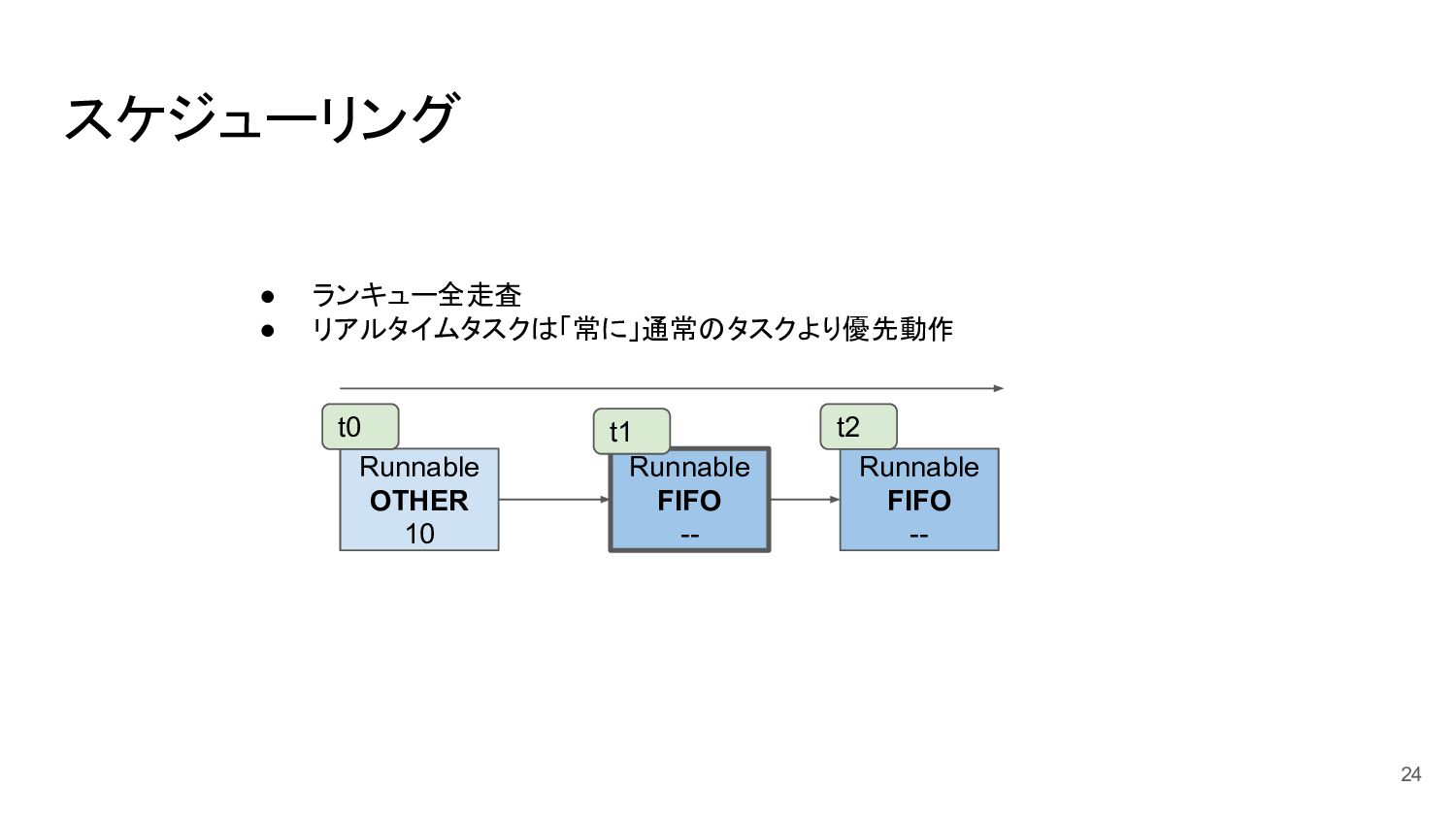
スケジューリング 24 Runnable OTHER 10 Runnable FIFO -- Runnable FIFO
-- • ランキュー全走査 • リアルタイムタスクは「常に」通常のタスクより優先動作 t0 t1 t2
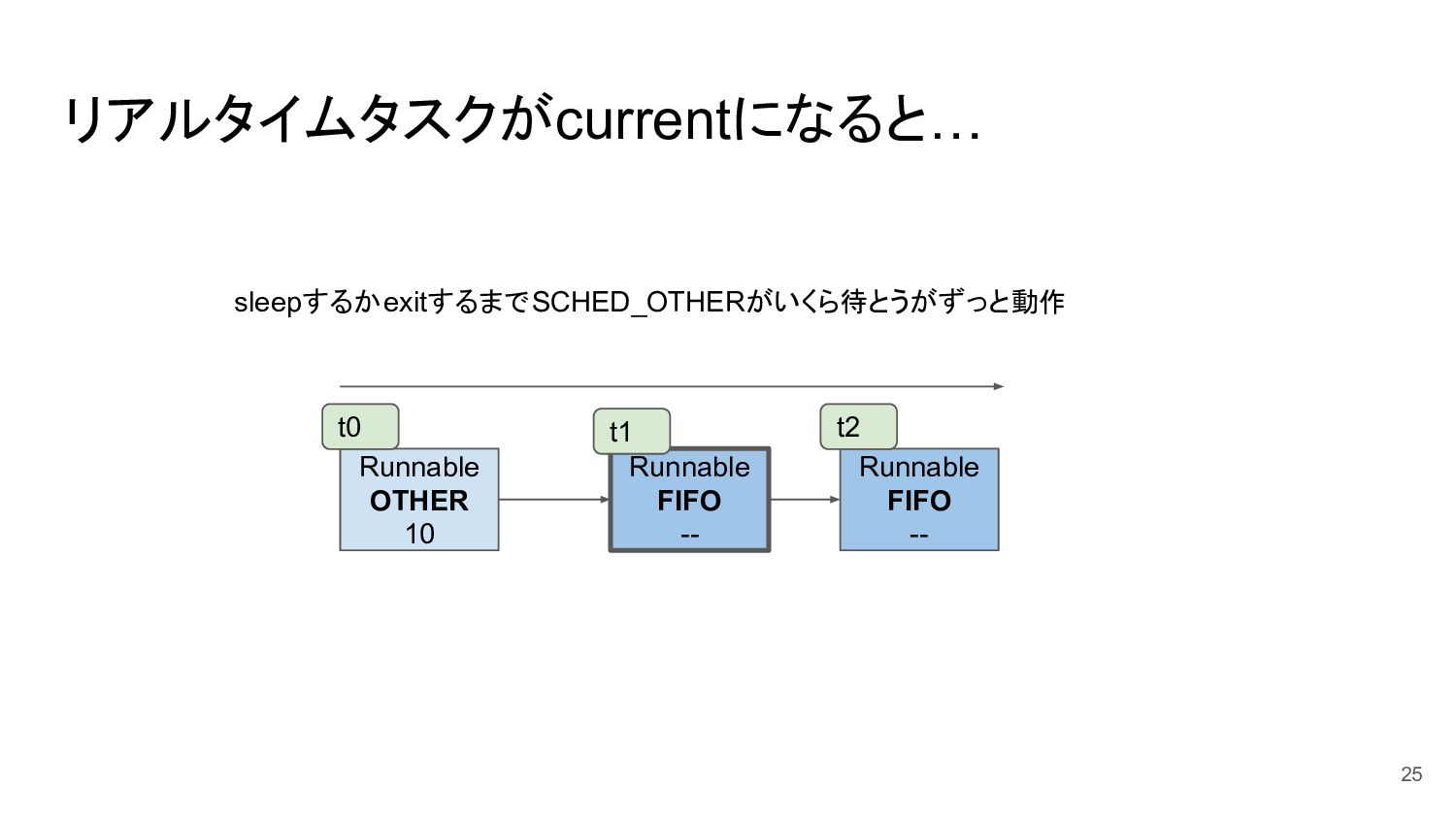
リアルタイムタスクがcurrentになると… 25 Runnable OTHER 10 Runnable FIFO -- Runnable FIFO
-- sleepするかexitするまでSCHED_OTHERがいくら待とうがずっと動作 t0 t1 t2
v2.2とv2.4 • 大して変化なし ◦ タイムスライスの計算方法が変わったくらい 26
まとめ • 初期におけるLinuxのプロセススケジューラの実装は極めてシンプルだった • 徐々に機能が増えてきた ◦ プリエンプション ◦ リアルタイムスケジューリング ◦
SMP対応 27
{kind=link}
{kind=link}
{kind=link}
![V0.01: スケジューリングアルゴリズム • ランキューを全走査して残りタイムスライスが最大のものを次に動かす • 該当者がいなければ全タスクのタイムスライスをリセット ◦ タイムスライスが切れているプロセスには 150[ms]与える ◦](https://files.speakerdeck.com/presentations/85c2255baea64d7fa76b358f91d261fd/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}