Perfection that the map of a single Province occupied the entirety of a City, and the map of the Empire, the entirety of a Province. In time, those Unconscionable Maps no longer satisfied, and the Cartographer’s Guilds struck a Map of the Empire whose size was that of the Empire, and which coincided point for point with it.” —Suarez Miranda,Viajes de varones prudentes, Libro IV,Cap. XLV, Lerida, 1658 On Exactitude in Science Jorge Luis Borges, Collected Fictions, translated by Andrew Hurley
metrics for mainstream cm-‐accurate GNSS will be !me to fix and cost. Keeping these tolerably low will require network RTK or PPP-‐RTK with a dense network: 1. As compared to tradiGonal PPP (sparse reference network), network RTK and PPP-‐RTK have faster convergence Gmes 2. For both dual-‐ and single-‐frequency rover receivers, a Gghter network significantly improves TTF down to an inter-‐ staGon distance of about 15 km 3. When targeGng the mass market, it makes economic sense to densify network: increased density speeds TTF and lowers receiver costs for millions of users
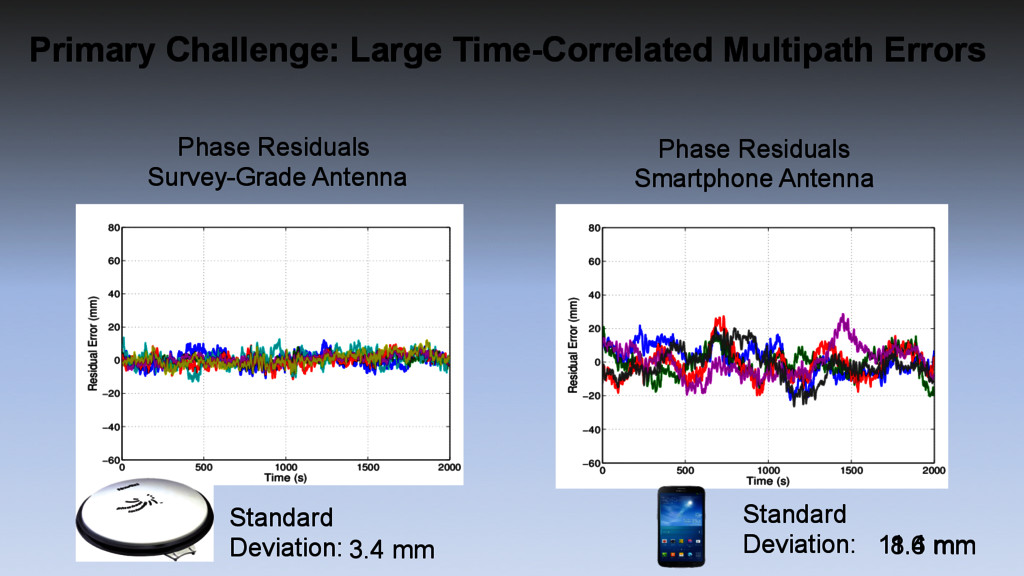
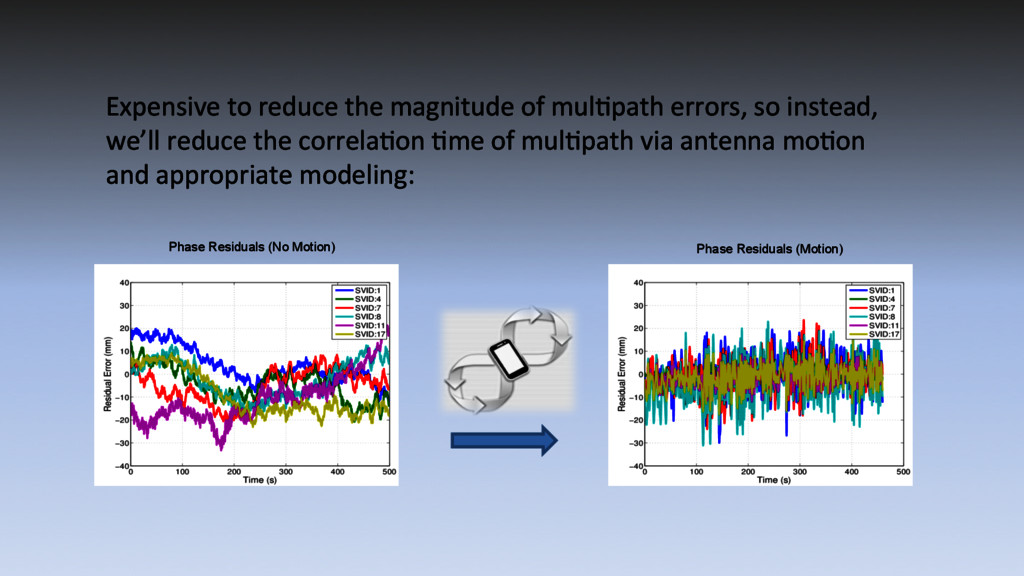
GNSS posiGoning feasible on consumer-‐grade mobile pla`orms such as smartphones and tablets? • What are the primary challenges? • How can these be addressed?
[TowFen&95] – Coupled mulGpath-‐esGmaGng delay-‐lock, phase-‐lock loop [PsiErt15] – Signal-‐to-‐noise-‐raGo-‐based mulGpath error correcGon [AxeCom&96] – Enhanced Strobe Correlator [GarRou97] – Ray tracing [LauCro07] • Downsides are that these exisGng techniques require either: – a-‐priori knowledge of antenna moGon profile [PsiErt15] or range to nearby reflecGon surfaces [LauCro07] – Extra computaGonal power to generate measurements at more than 3 correlaGon taps [NeeSie&94], [TowFen&95] – A lengthy measurement duraGon to idenGfy mulGpath frequency [AxeCom&96] – A high sampling rate in excess of 20 megasamples per second [GarRou97] Existing Multipath Mitigation Techniques Inapt
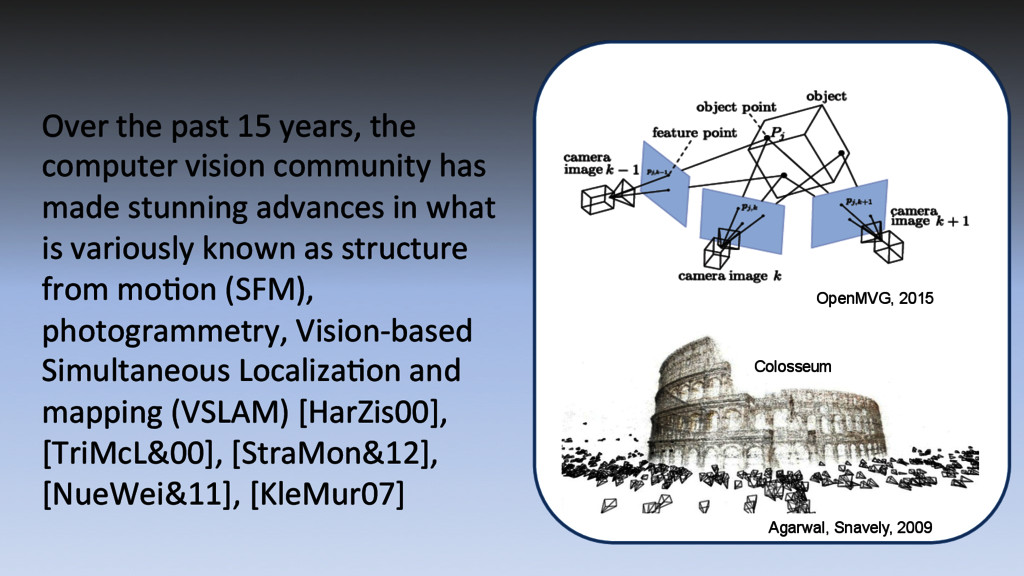
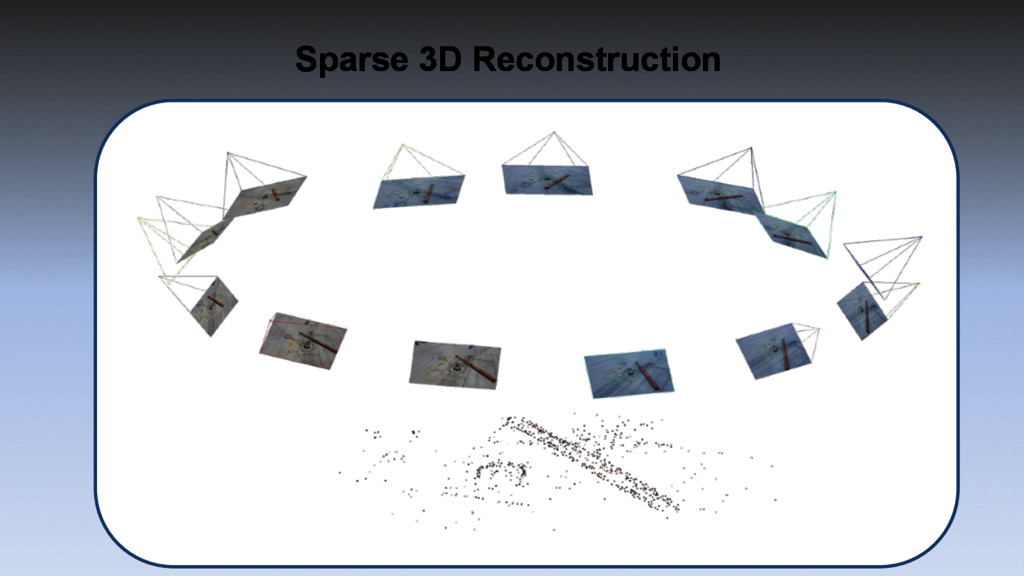
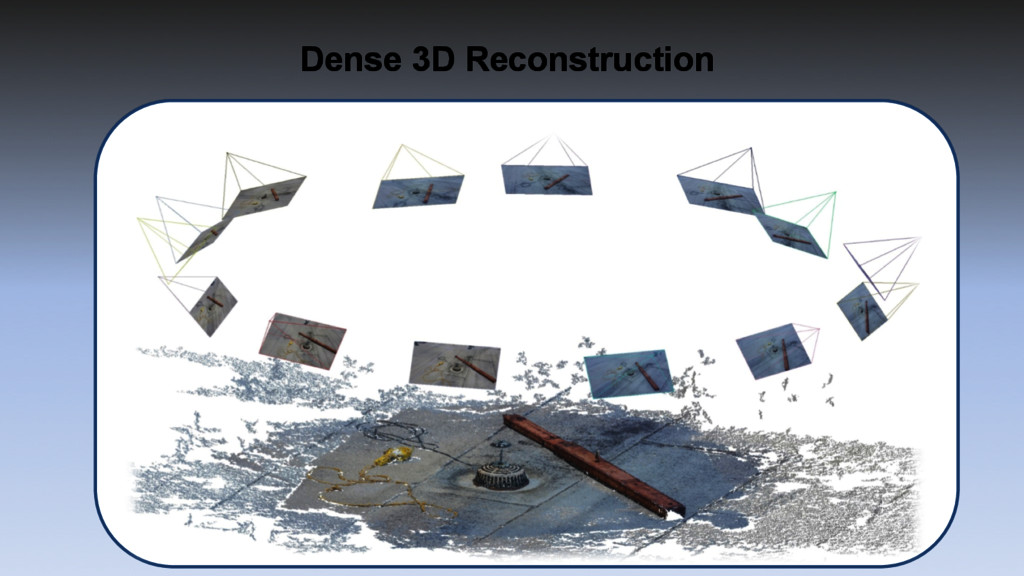
has made stunning advances in what is variously known as structure from moGon (SFM), photogrammetry, Vision-‐based Simultaneous LocalizaGon and mapping (VSLAM) [HarZis00], [TriMcL&00], [StraMon&12], [NueWei&11], [KleMur07] OpenMVG, 2015 Agarwal, Snavely, 2009 Colosseum
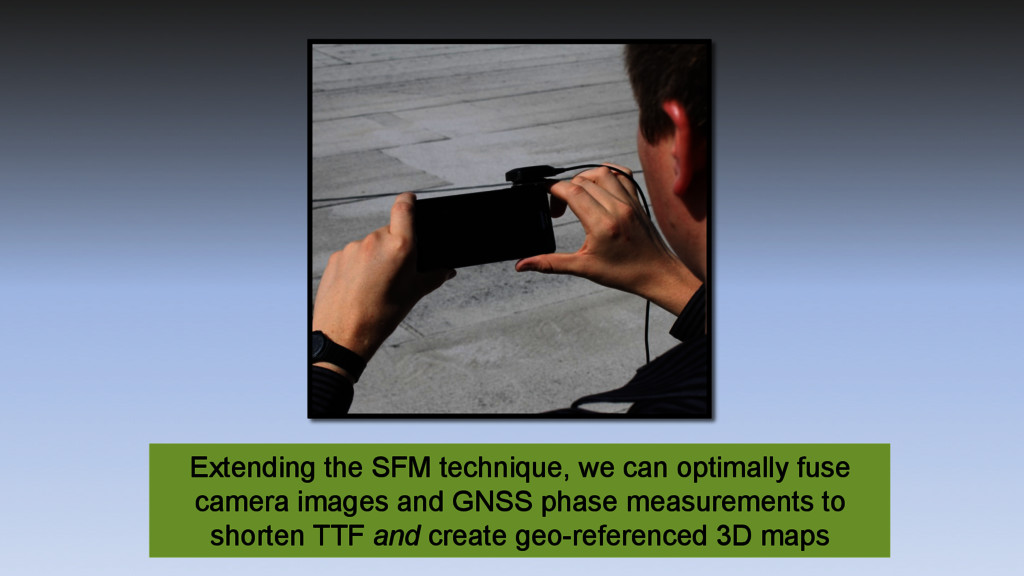
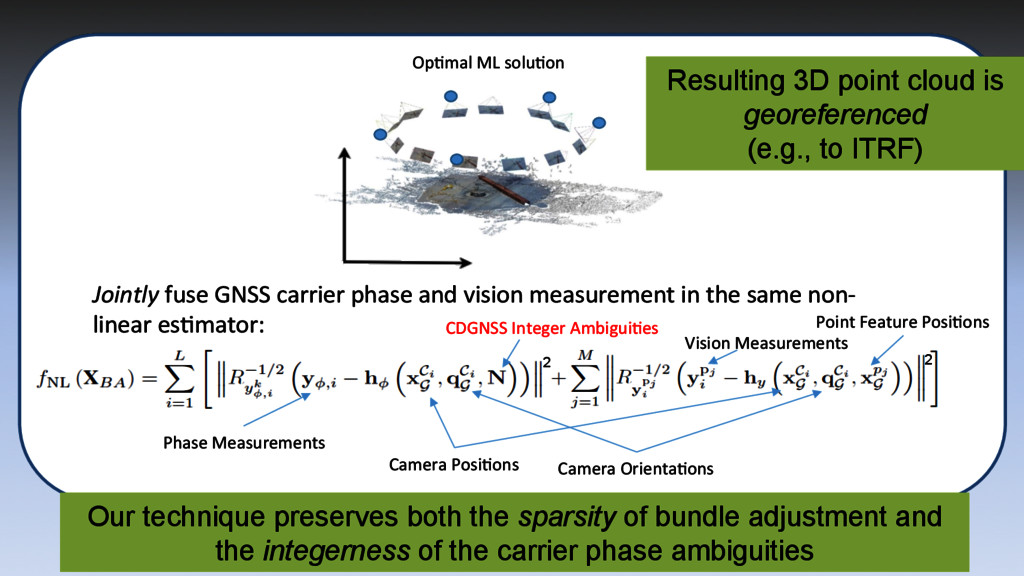
same non-‐ linear esGmator: OpGmal ML soluGon Phase Measurements Camera OrientaGons Camera PosiGons Vision Measurements Point Feature PosiGons CDGNSS Integer AmbiguiGes 2 2 Our technique preserves both the sparsity of bundle adjustment and the integerness of the carrier phase ambiguities Resulting 3D point cloud is georeferenced (e.g., to ITRF)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![• ExisGng techniques include: – MulGpath-‐EsGmaGng Delay-‐Lock Loop [NeeSie&94],](https://files.speakerdeck.com/presentations/dc0c2d9d9a814d56a2b9beadbb983eb2/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}