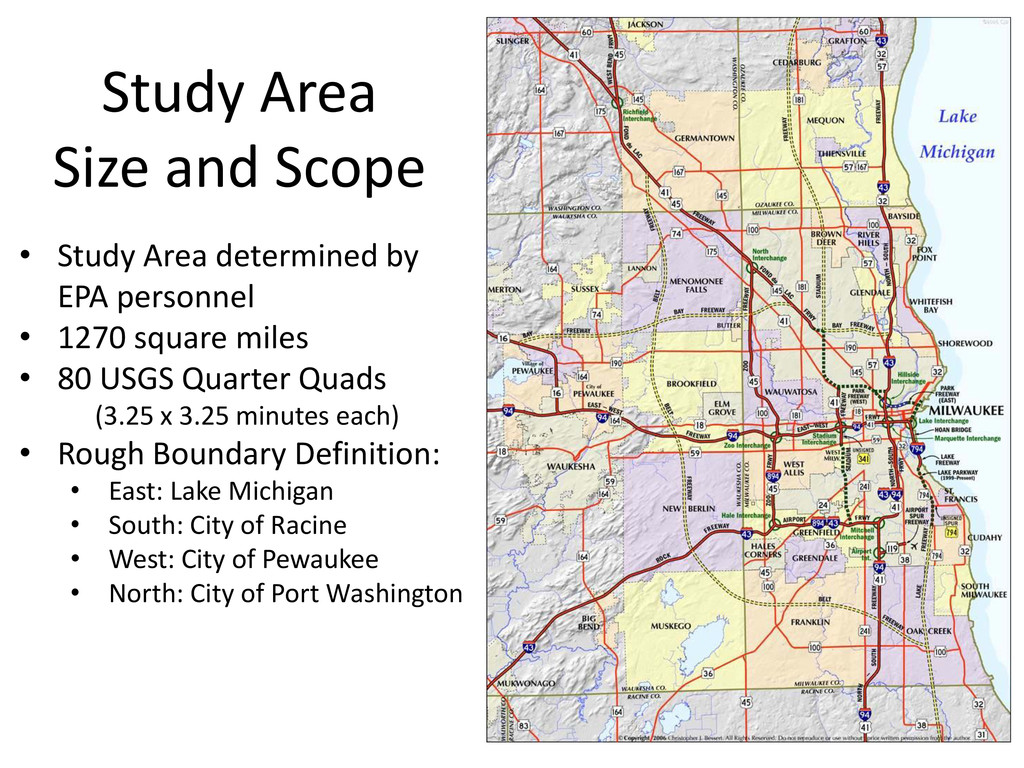
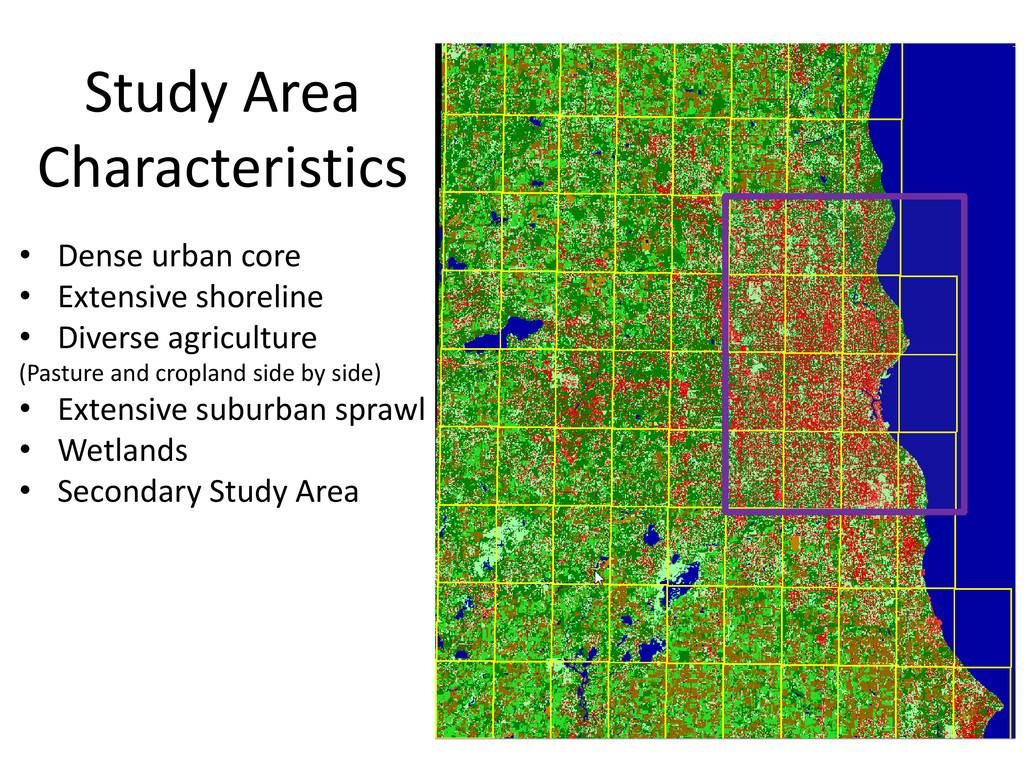
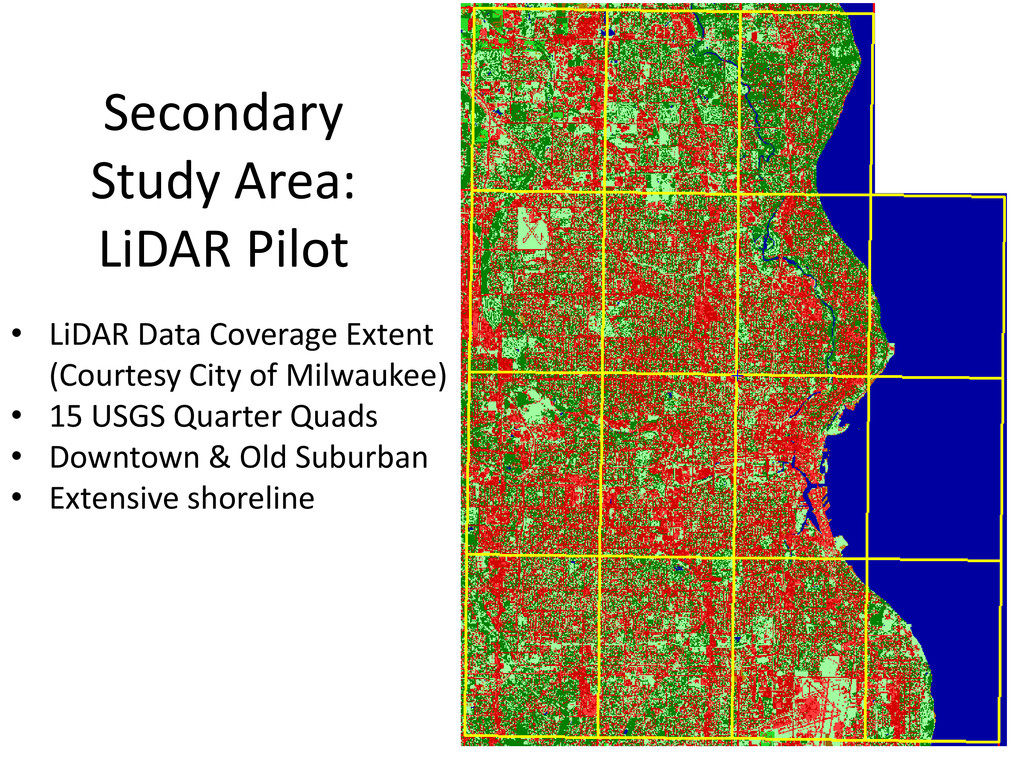
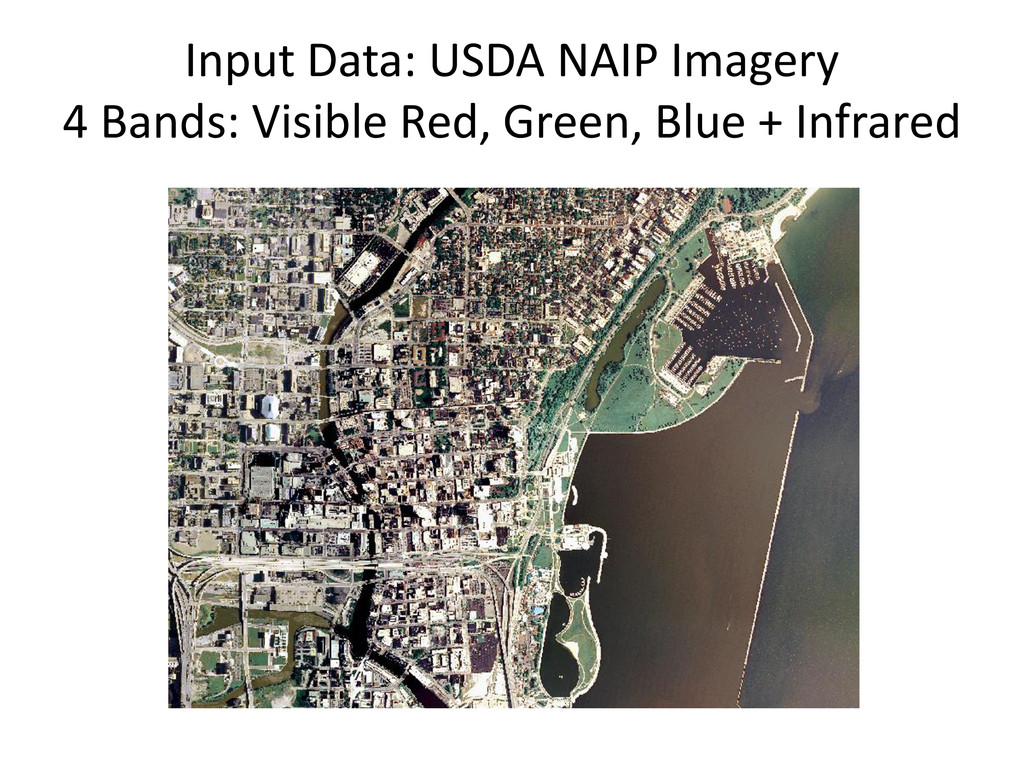
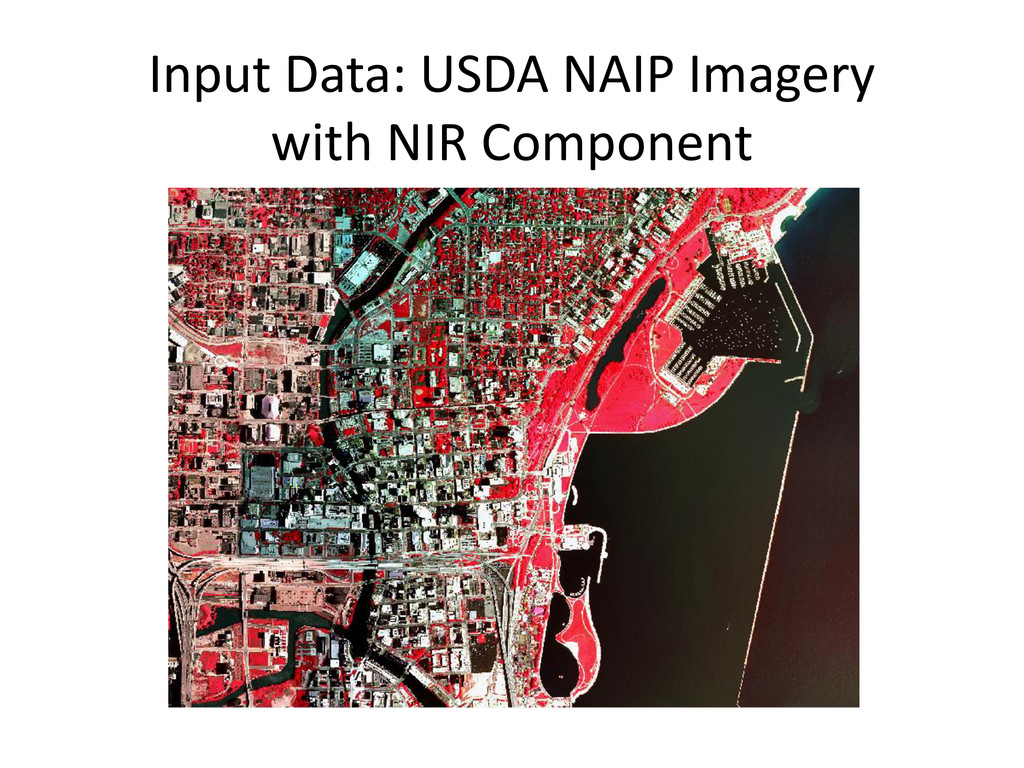
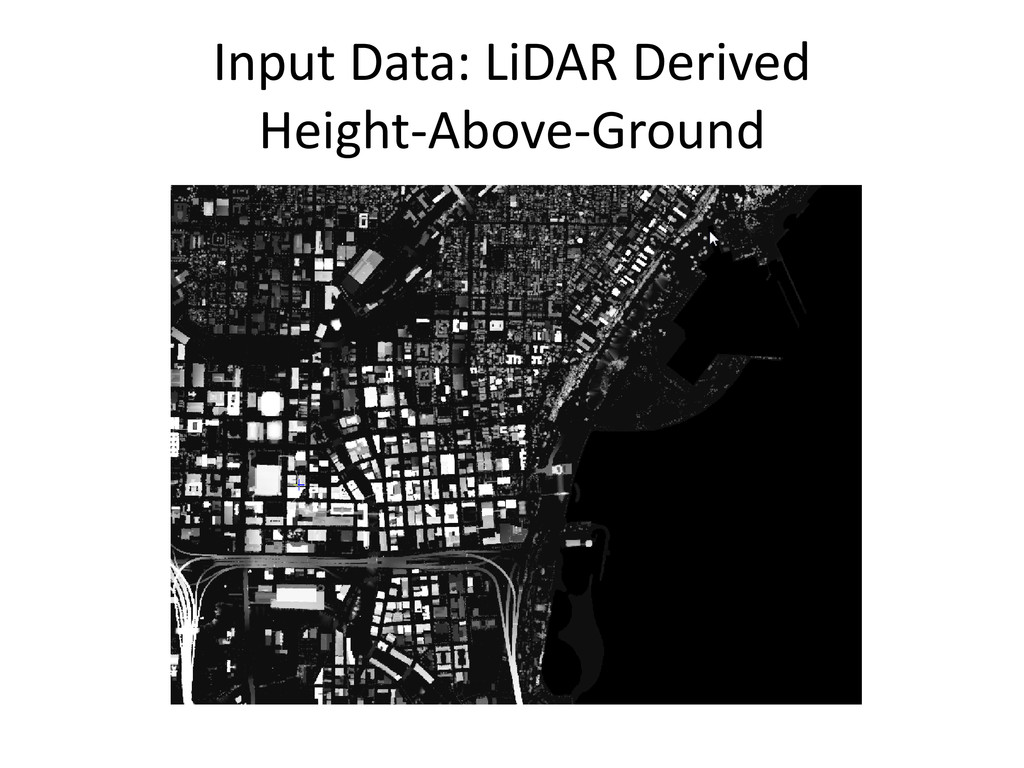
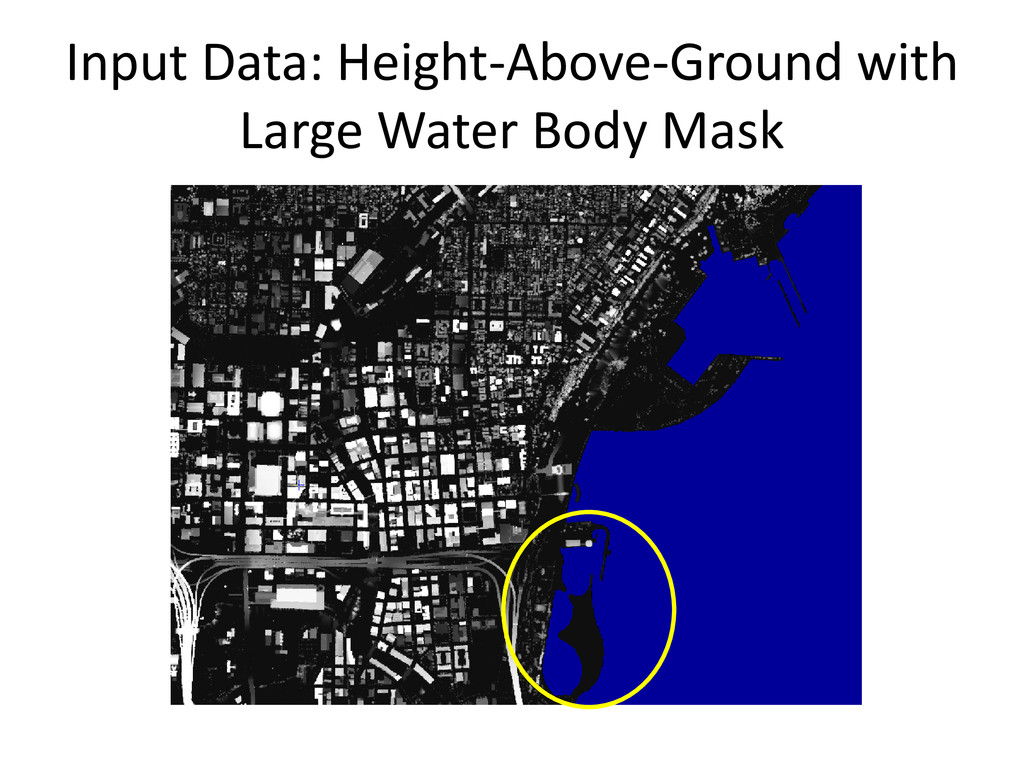
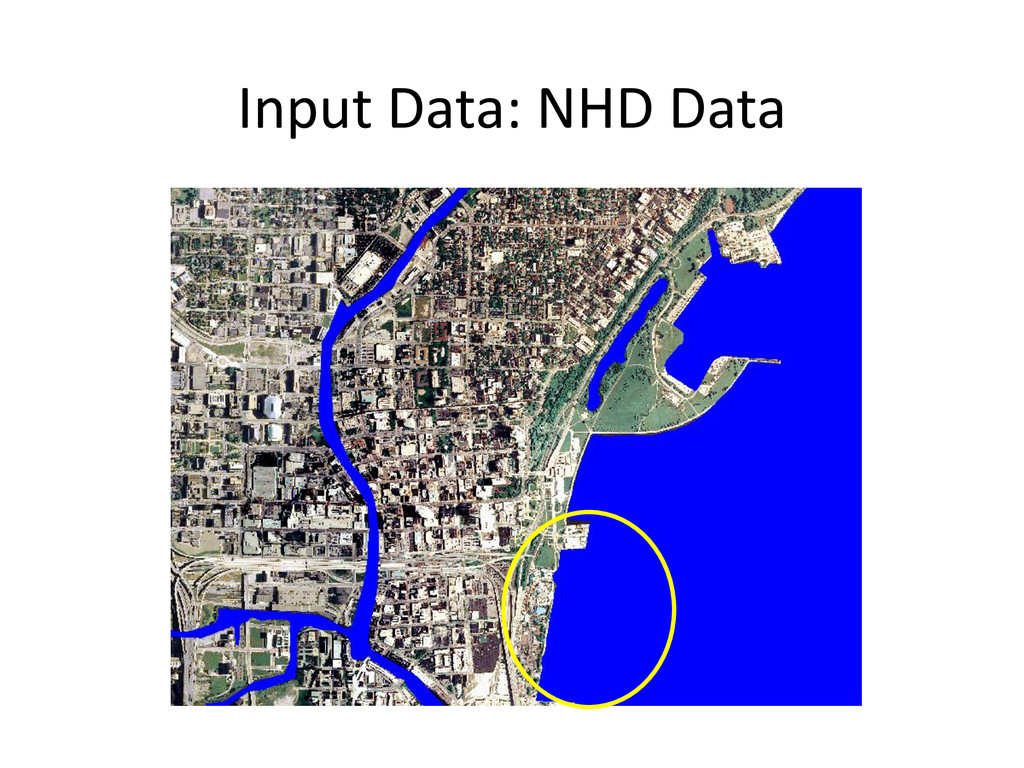
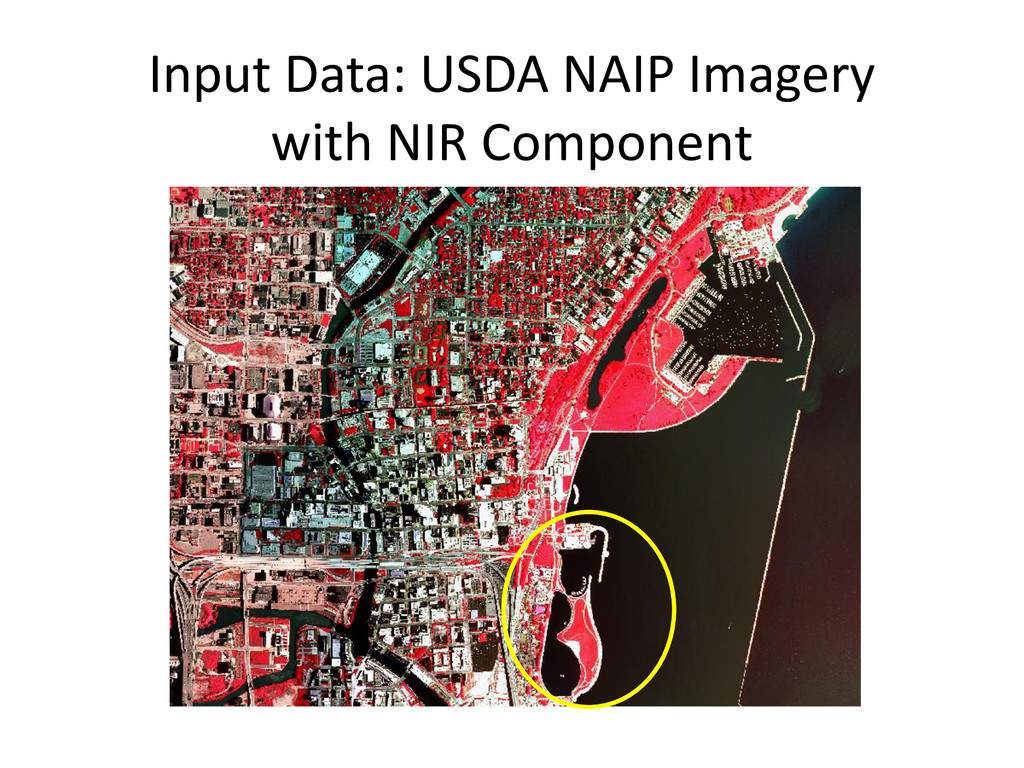
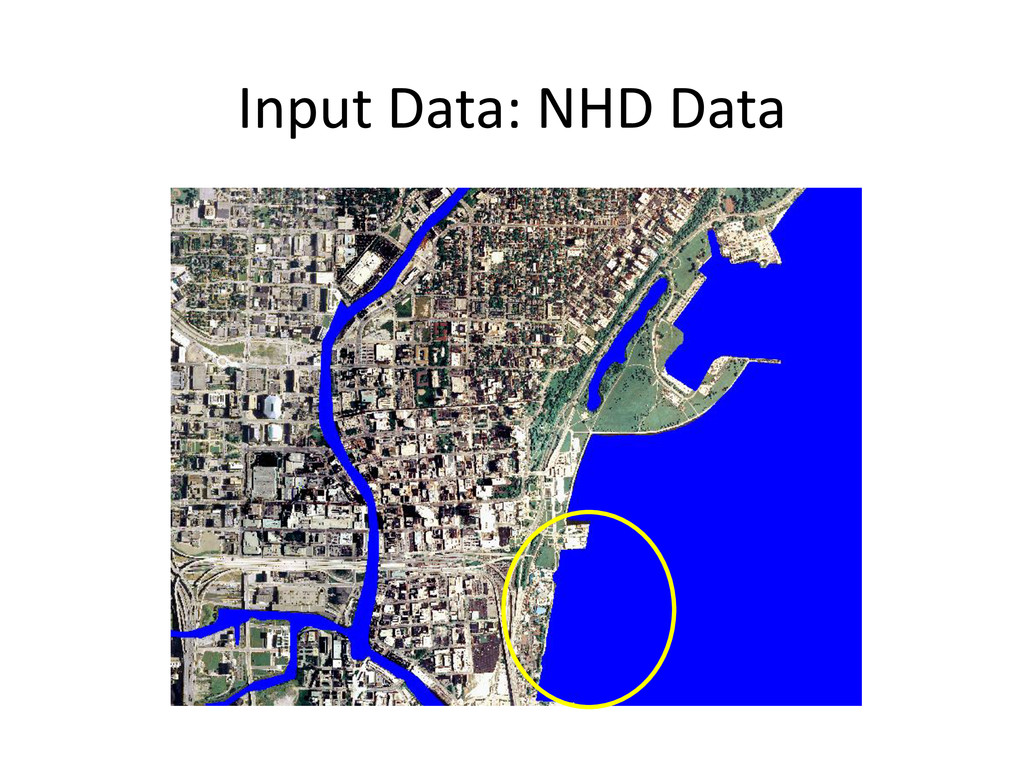
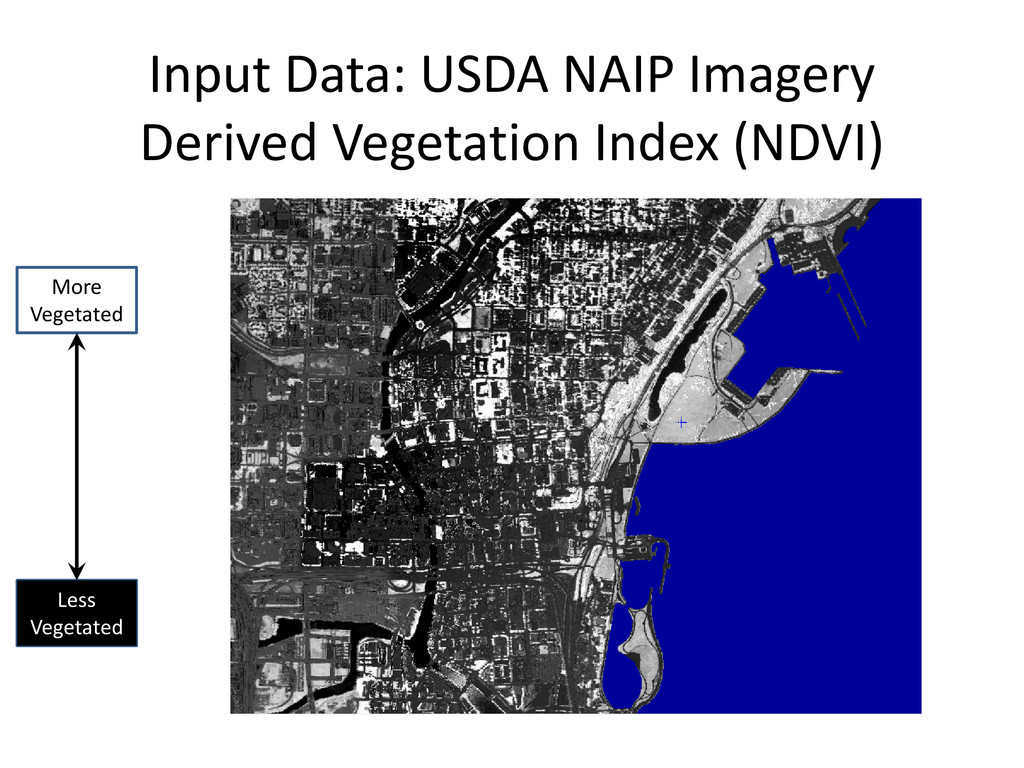
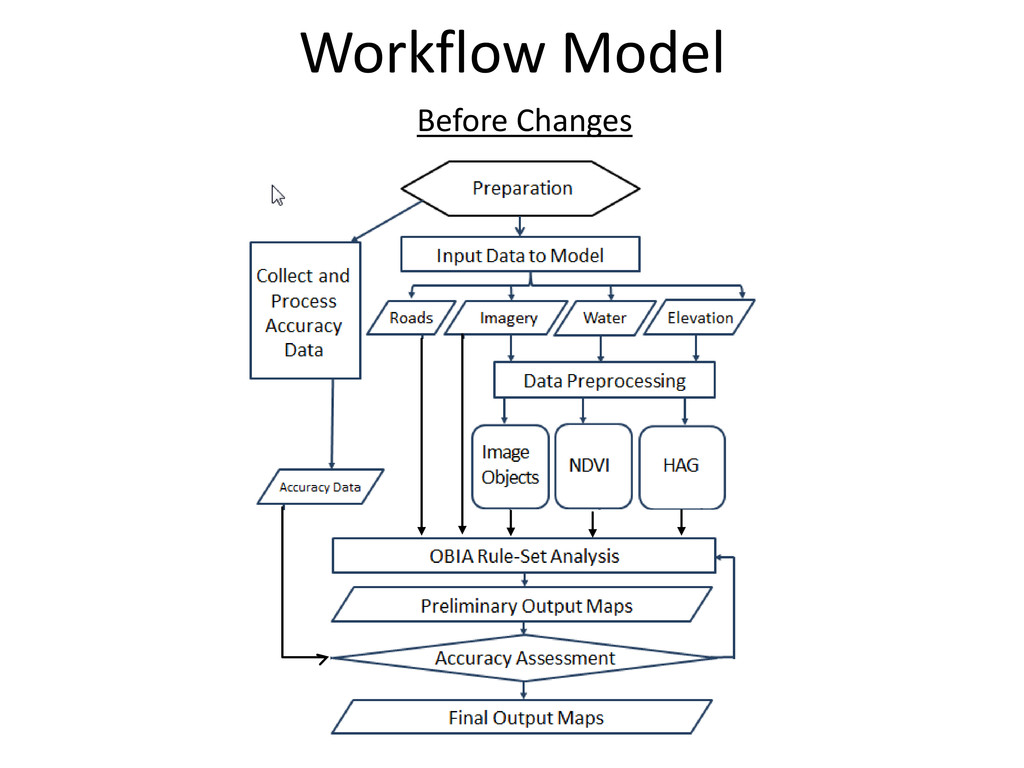
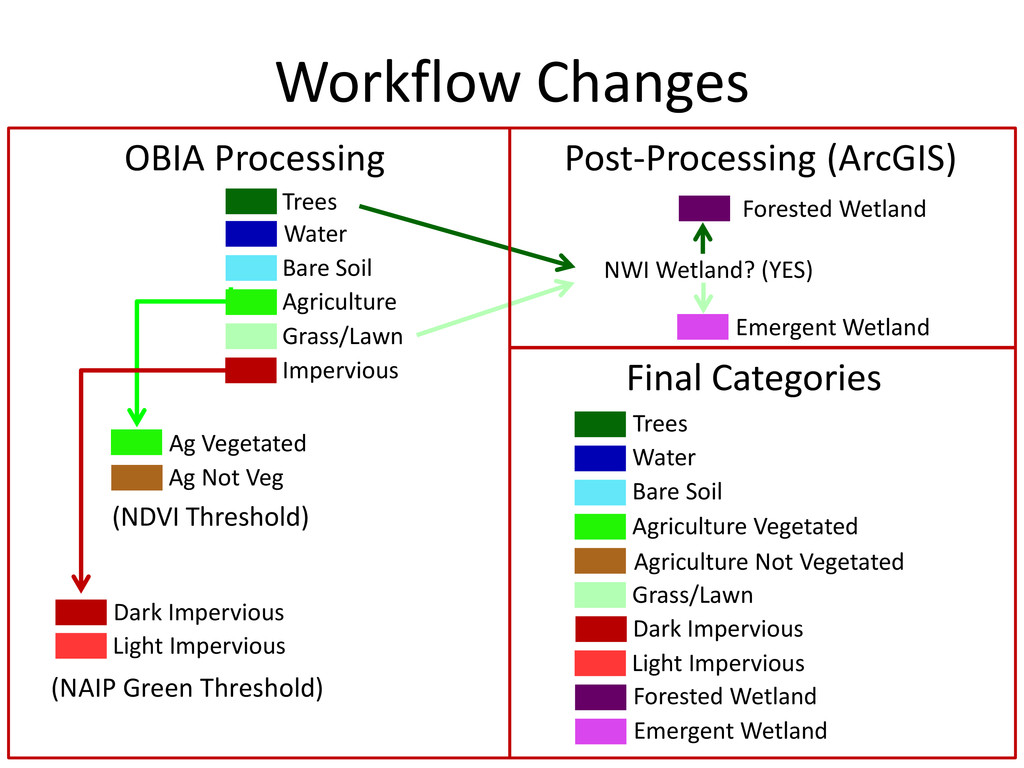
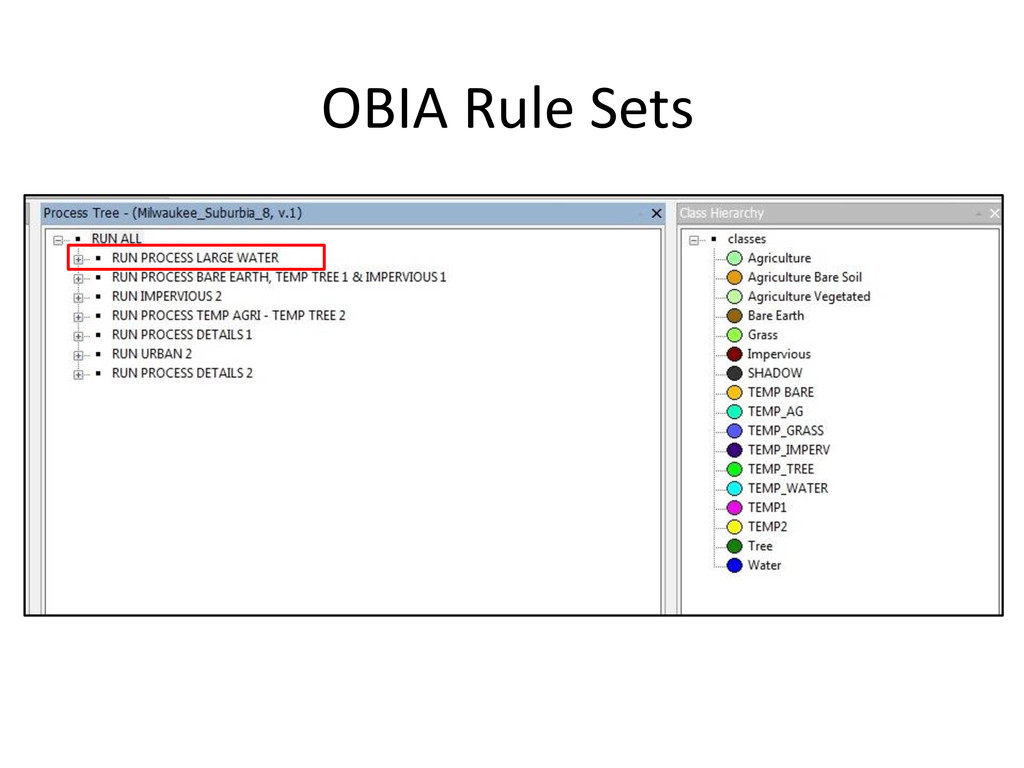
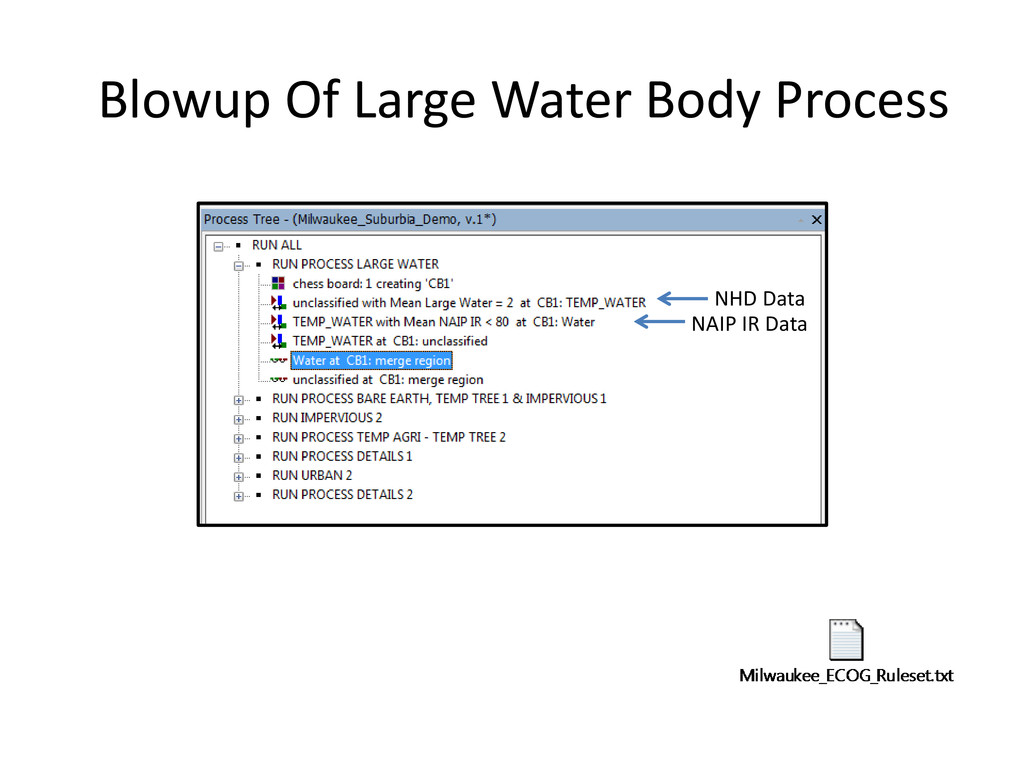
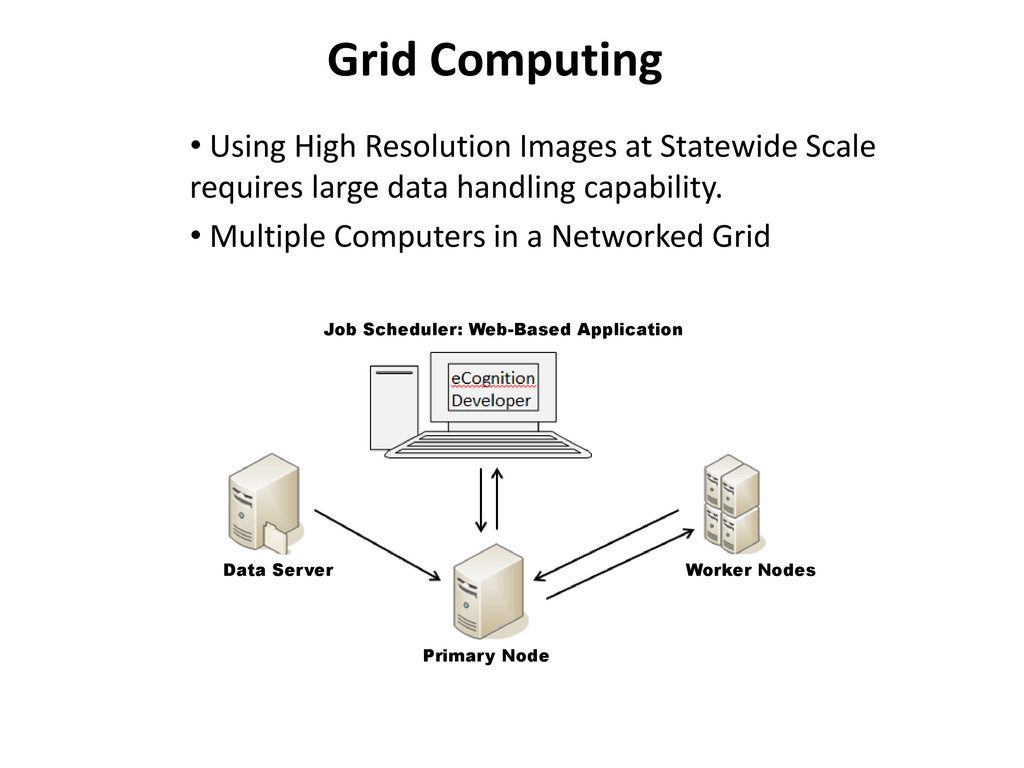
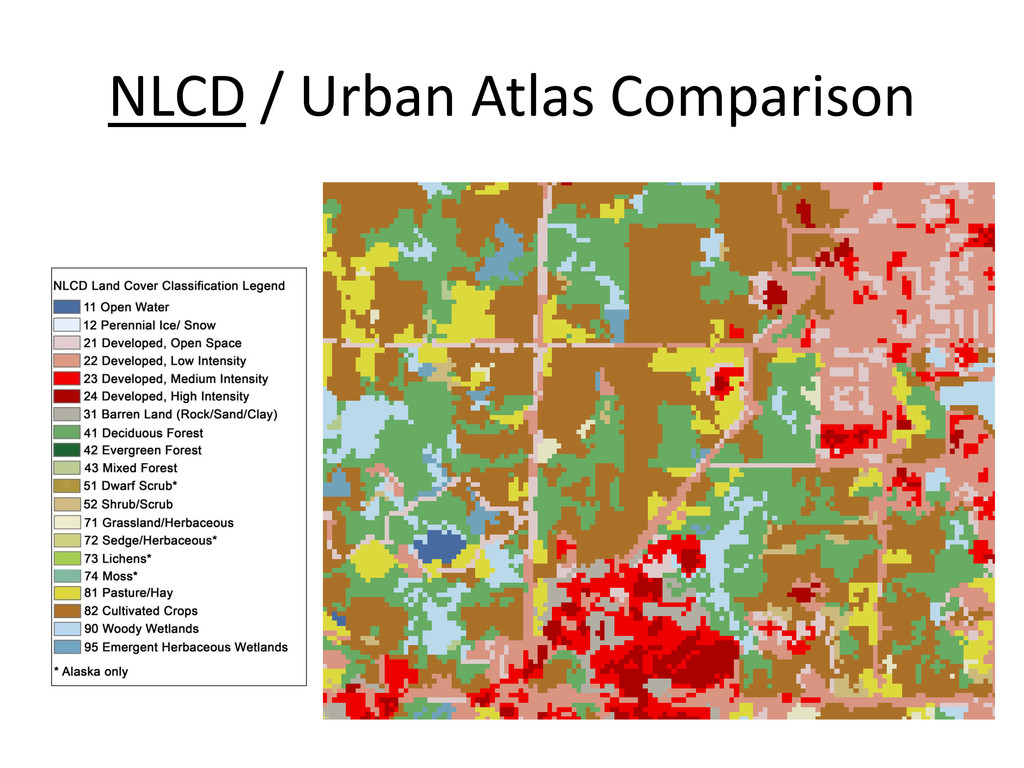
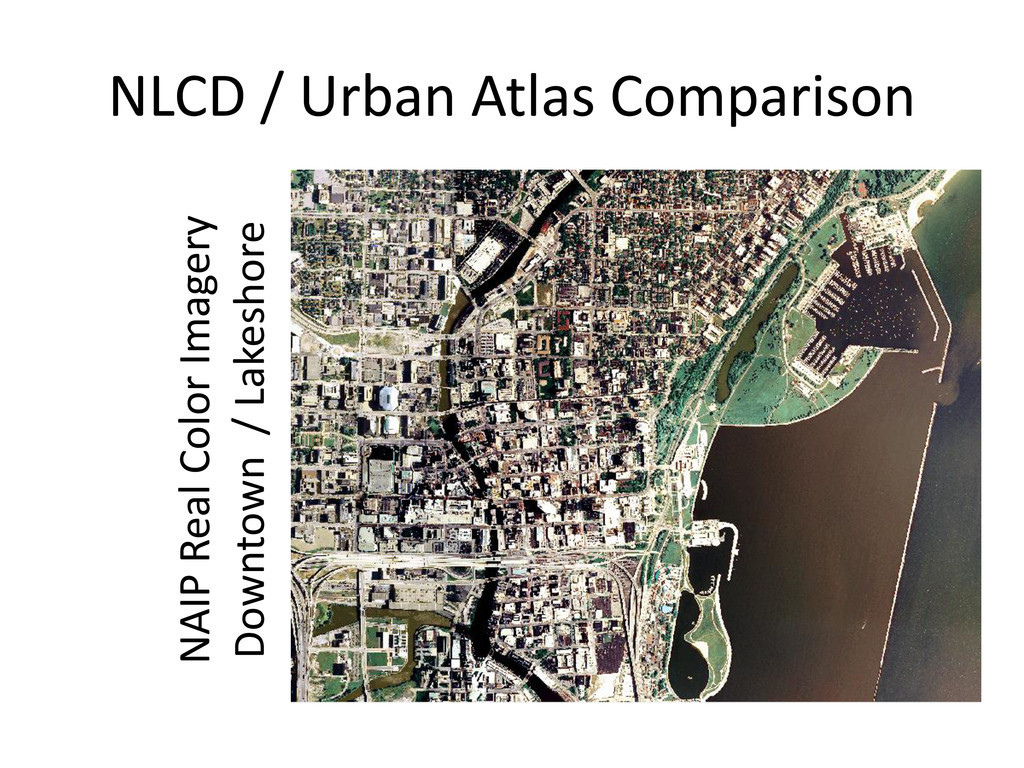
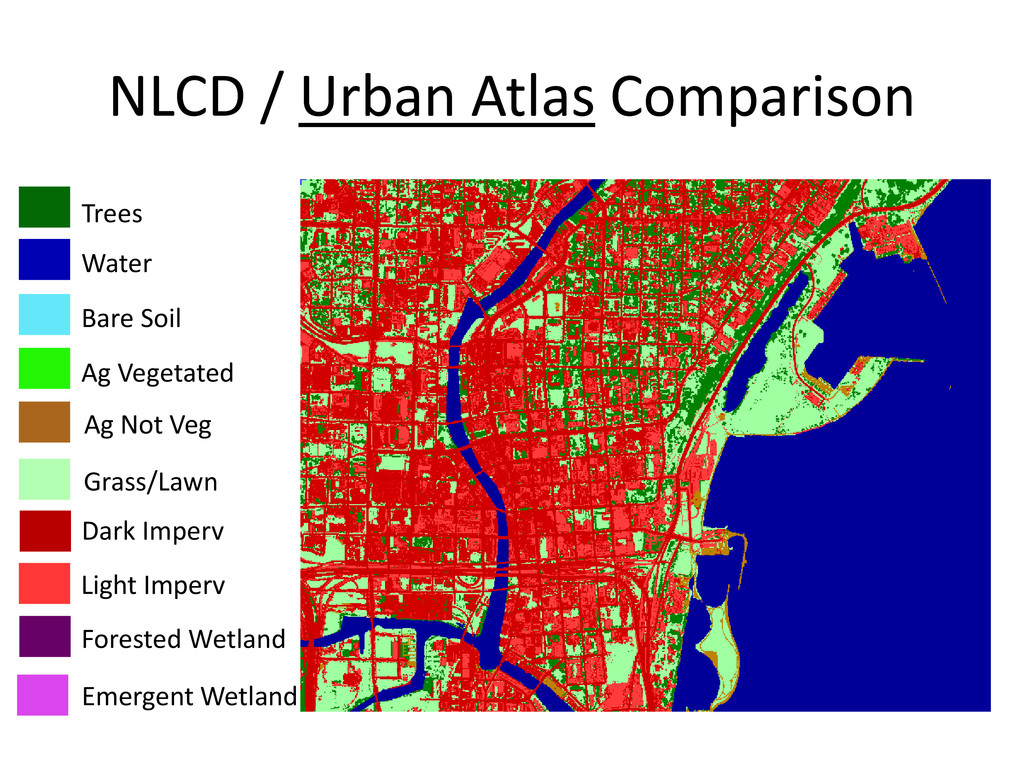
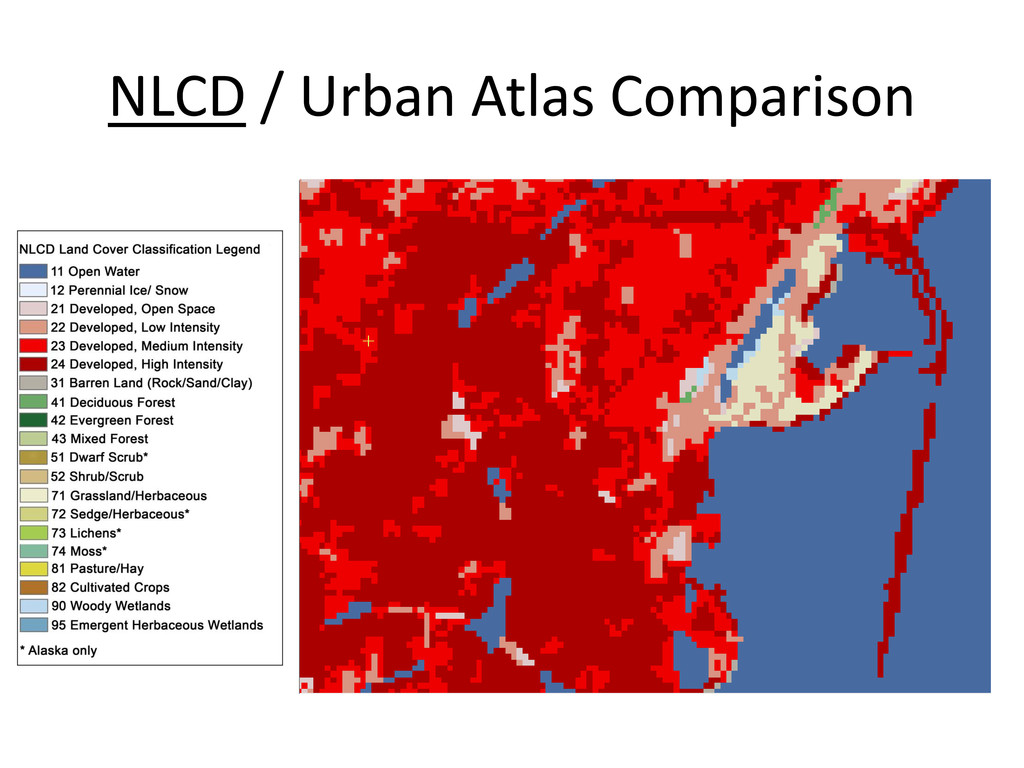
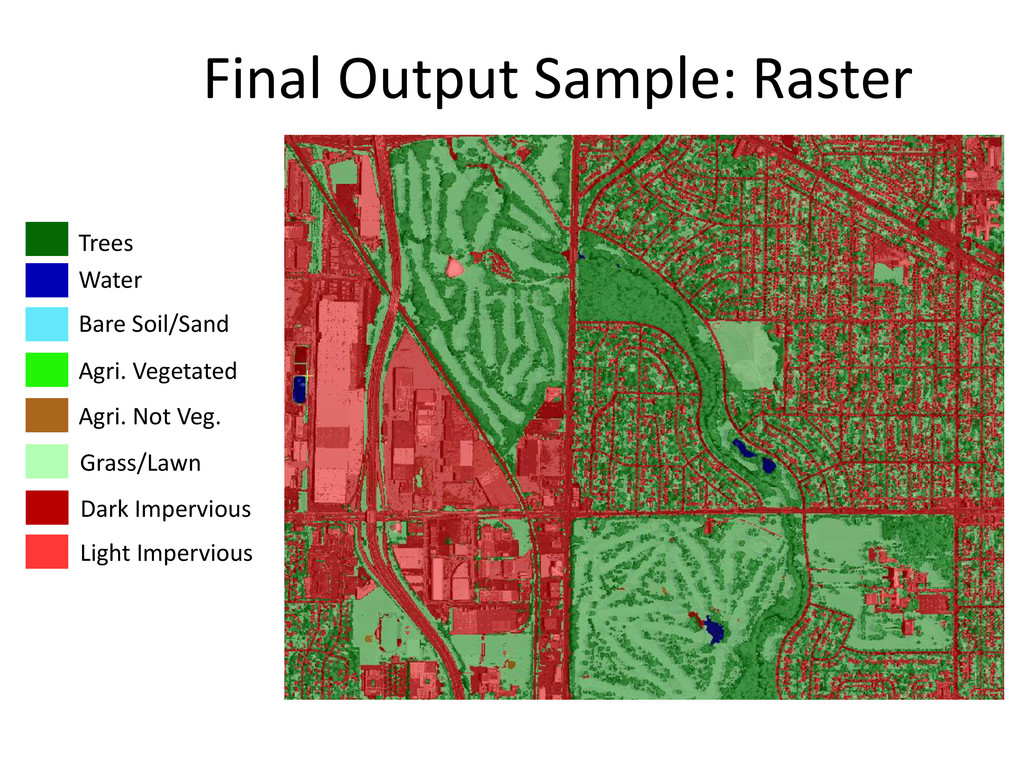
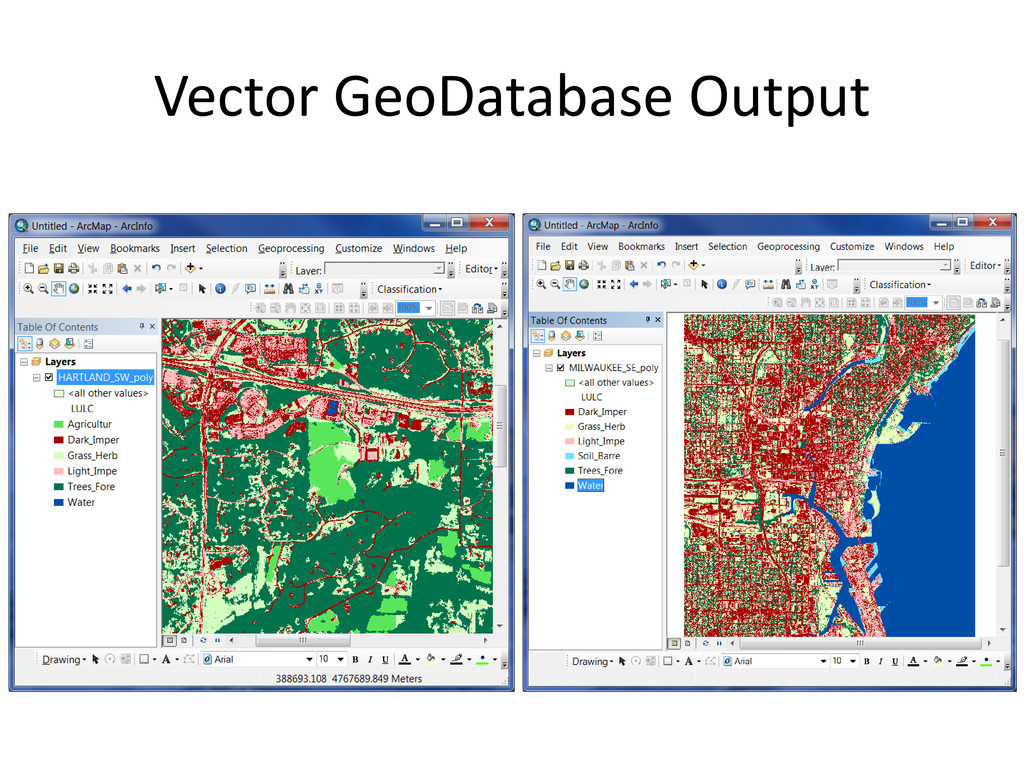
This case study details research and development efforts performed at the Center for Advanced Spatial Technologies for the U.S. Environmental Protection Agency’s Sustainable and Healthy Communities Research Program. The objective of the research presented here was to create spatially and categorically accurate land-cover maps (including tree canopy and impervious surfaces} from 1 meter resolution USDA-NAIP imagery for the Milwaukee, Wisconsin metropolitan area. Secondarily, the project was intended to further the production of consistent, transferable, and automated methods for developing high-resolution impervious surface/land-cover maps and to transfer the resulting methods and technologies to U.S. EPA for use in the mapping of other urban areas. The presentation covers all aspects of the production process: data acquisition and preprocessing, object-based image analysis (ruleset development}, post-processing in ArcGIS, and accuracy assessment. The presentation also addresses the use of ancillary data sets such as LiDAR in the development of quality land-use, land-cover data.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}