Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
[Journal club] Denoising Diffusion Probabilisti...
Search
Semantic Machine Intelligence Lab., Keio Univ.
PRO
July 28, 2022
Technology
440
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
[Journal club] Denoising Diffusion Probabilistic Models
Semantic Machine Intelligence Lab., Keio Univ.
PRO
July 28, 2022
More Decks by Semantic Machine Intelligence Lab., Keio Univ.
See All by Semantic Machine Intelligence Lab., Keio Univ.
[Journal club] Predict Before You Explore: Predictive Planning with Specialized Memory for Embodied Question Answering
keio_smilab
PRO
0
84
[Journal club] PHyCLIP: 𝒍𝟏-Product of Hyperbolic Factors Unifies Hierarchy and Compositionality in Vision-Language Representation Learning
keio_smilab
PRO
0
86
[Journal club] ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
keio_smilab
PRO
0
110
[Journal club] ReLaGS: Relational Language Gaussian Splatting
keio_smilab
PRO
0
120
[Journal club] Flow as the Cross-Domain Manipulation Interface
keio_smilab
PRO
0
98
Mobi-𝜋: Mobilizing Your Robot Learning Policy
keio_smilab
PRO
0
160
A Gentle Introduction to Transformers
keio_smilab
PRO
16
7k
FlowAR: Scale-wise Autoregressive Image Generation Meets Flow Matching
keio_smilab
PRO
0
60
[Journal club] VLA-Adapter: An Effective Paradigm for Tiny-Scale Vision-Language-Action Model
keio_smilab
PRO
1
150
Other Decks in Technology
See All in Technology
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
4
2.5k
41歳でAWSが好きすぎてITエンジニアになったおっさんの話
yama3133
1
740
全社でのソフトウェアサプライチェーン攻撃対策をやってみた with Takumi Guard
z63d
0
270
AI時代におけるテストの基礎の再定義 / Rethinking the Fundamentals of Testing in the AI Era
mineo_matsuya
13
4.4k
OpenTelemetryにおけるGoのゼロコード・コンパイル時計装について #fukuokago
quiver
0
210
ゴールデンパスは敷いただけでは道にならない ─ 企画部門のエンジニアが技術標準を事業価値に変えるまで
mhrtech
1
260
Jitera Company Deck
jitera
0
270
現場との対話から始める “作る前に問い直す”業務改善
mochico50
1
220
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
370
AICoEでAIネイティブ組織への進化
yukiogawa
0
220
2026年のソフトウェア開発を考える(2026/07版) / Agentic Software Engineering 2026-07 Findy Edition
twada
PRO
25
11k
AI時代こそ、スケールしないことをしよう -「作る人」から「なぜ作るか」を考える人へ / Do Things That Don't Scale in the AI Era — From How to Why
kaminashi
1
100
Featured
See All Featured
Paper Plane (Part 1)
katiecoart
PRO
1
9.8k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
Embracing the Ebb and Flow
colly
88
5.1k
Exploring the Power of Turbo Streams & Action Cable | RailsConf2023
kevinliebholz
37
6.5k
How to optimise 3,500 product descriptions for ecommerce in one day using ChatGPT
katarinadahlin
PRO
1
3.7k
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
How to audit for AI Accessibility on your Front & Back End
davetheseo
0
470
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
380
Stewardship and Sustainability of Urban and Community Forests
pwiseman
0
370
Building Applications with DynamoDB
mza
96
7.1k
Lightning Talk: Beautiful Slides for Beginners
inesmontani
PRO
2
610
Transcript
Denoising Diffusion Probabilistic Models Jonathan Ho, Ajay Jain, Pieter Abbeel,
UC Berkeley, NeurlPS 2020 慶應義塾大学 杉浦孔明研究室 B4小松 拓実 Ho, Jonathan, Ajay Jain, and Pieter Abbeel. "Denoising diffusion probabilistic models." Advances in Neural Information Processing Systems 33 (2020): 6840-6851.
2 概要 ・拡散モデルを用いた高品質な画像の生成手法はほとんど存在していなかった ・(拡散モデルとLangevin動力学を利用したscore matching手法との関連を示した) ・損失関数を工夫し、高品質な画像を生成することを可能にした ・実験結果より、既存手法と同等の高品質な画像を生成することを示した
3 背景 : Diffusion Probabilistic Models[Jascha+, ICML15] ▪ Diffusion Probabilistic
Models データにnoiseを繰り返し足すことで単純な分布(Gaussianなど)に 変換する過程(拡散過程)を考え、その逆変換(逆拡散過程) によって、データを生成する手法 (具体的には提案手法のはじめに)
4 関連研究 : 深層生成モデルは高品質かつ多様な画像生成は困難である 深層生成モデル 概要 VAEs VAE[D.P.Kingma+, ICLR2014] Encoder-Decoderと変分法を利用した
潜在変数モデル GANs GAN[GoodFellow+, NIPS14] 最尤推定を用いず、生成器と識別器を競 合させることで学習を行う 自己回帰モデル PixelRNN[A. Oord+, ICML16] 過去の出力結果を条件に新しいデータを 次々に出力するモデル 正規化フロー NICE[L.Dinh+, ICLR15] 簡単な分布に対し、可逆変換を繰り返し適 用することで目的の分布を得るモデル VQ-VAE-2[Ali+, NeurIPS19] Big GAN[Andrew+, ICLR19] Glow[Diederik+, NeurIPS18]
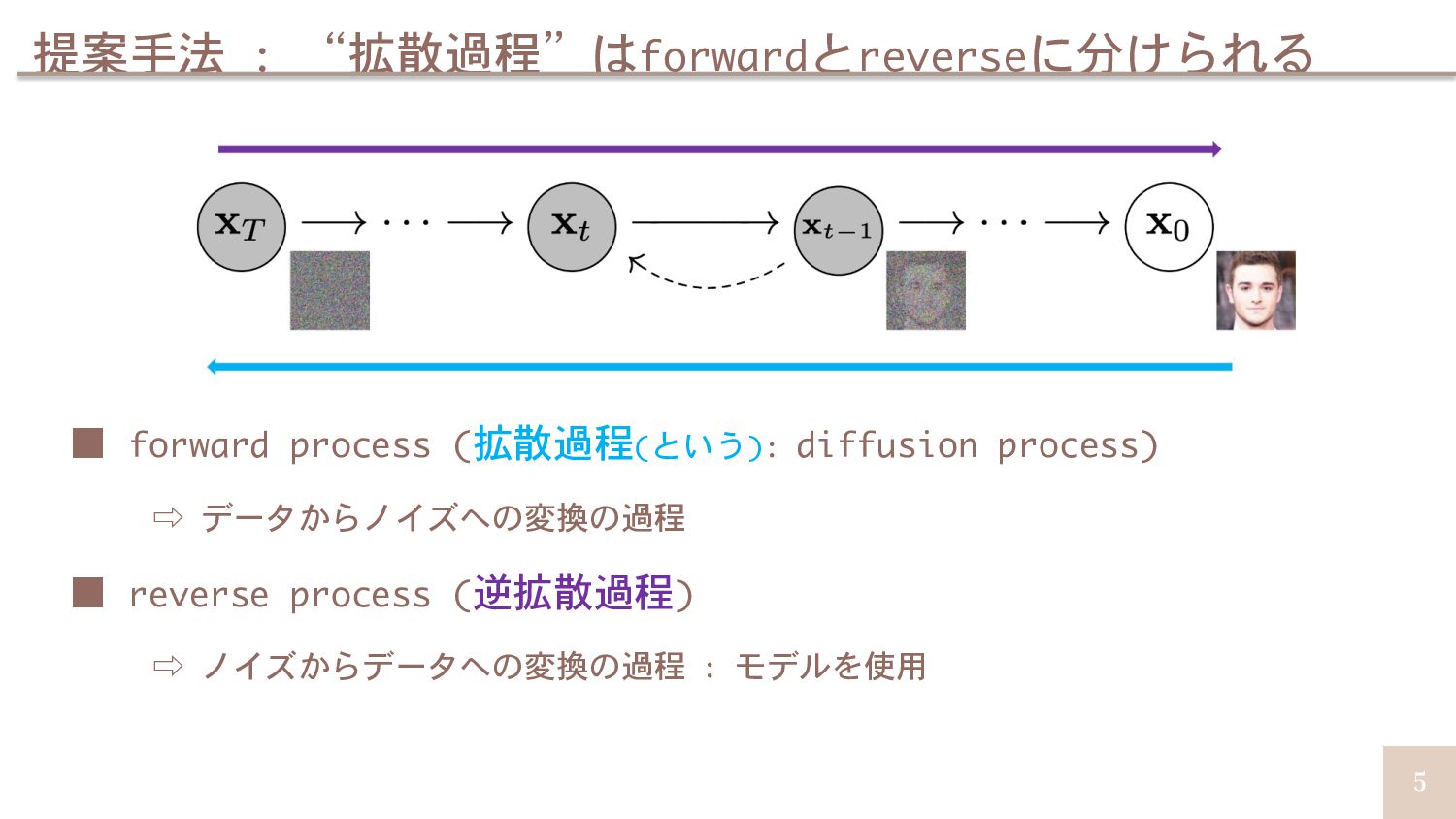
5 提案手法 : “拡散過程”はforwardとreverseに分けられる ⇨ データからノイズへの変換の過程 ▪ forward process (拡散過程(という):
diffusion process) ▪ reverse process (逆拡散過程) ⇨ ノイズからデータへの変換の過程 : モデルを使用
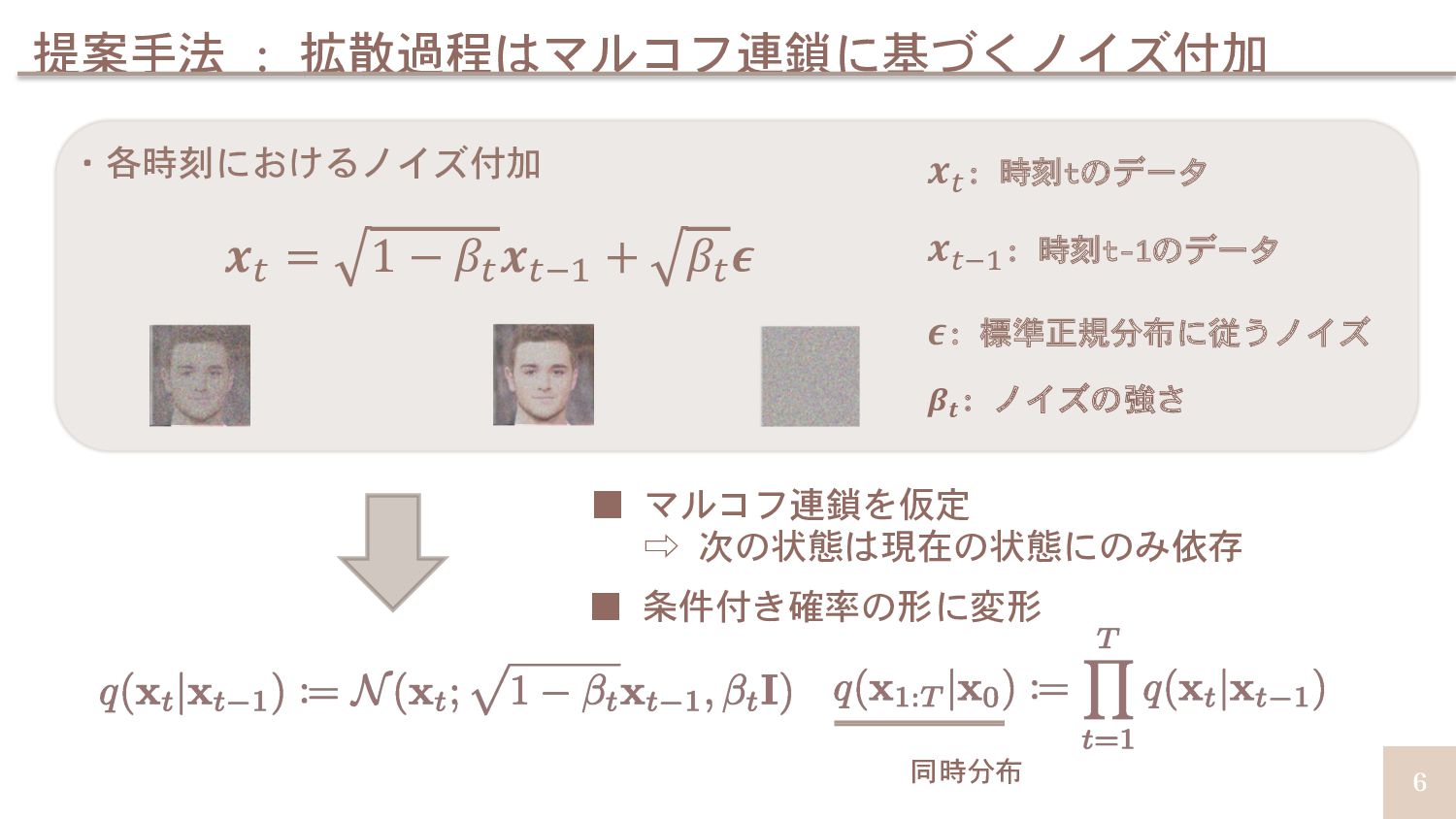
6 提案手法 : 拡散過程はマルコフ連鎖に基づくノイズ付加 ・各時刻におけるノイズ付加 𝒙! = 1 − 𝛽!𝒙!"#
+ 𝛽!𝝐 𝒙!: 時刻tのデータ 𝒙!"#: 時刻t-1のデータ 𝝐: 標準正規分布に従うノイズ ▪ マルコフ連鎖を仮定 ⇨ 次の状態は現在の状態にのみ依存 ▪ 条件付き確率の形に変形 同時分布 𝜷𝒕: ノイズの強さ
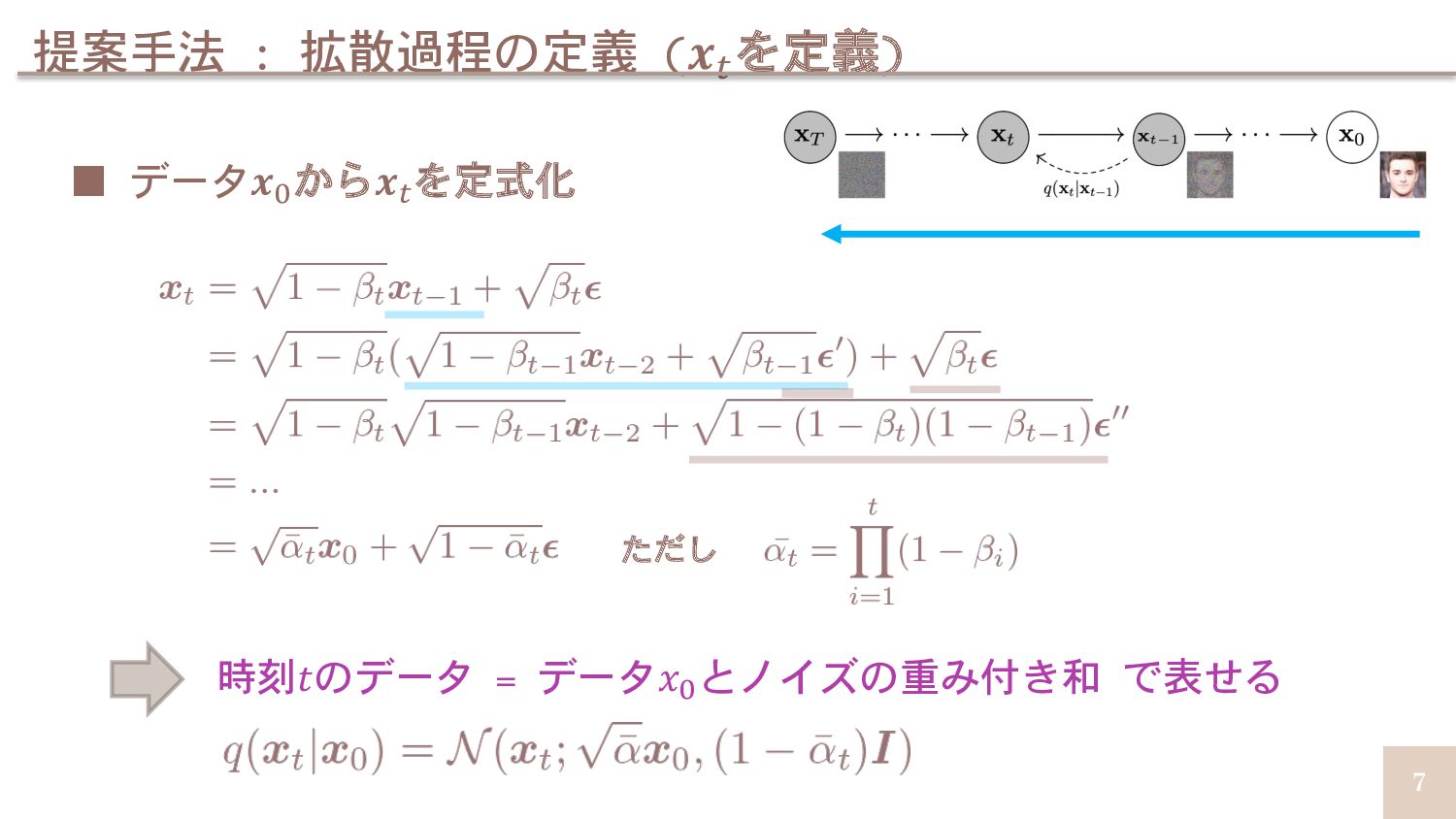
7 提案手法 : 拡散過程の定義 (𝒙!を定義) ▪ データ𝒙$から𝒙!を定式化 時刻𝑡のデータ = データ𝑥$とノイズの重み付き和
で表せる ただし
8 提案手法 : 逆拡散過程の定義 ▪ 逆拡散過程 ⇨ 逆方向の平均と分散をモデルで推定すればよい 𝛽が十分小さいとき、逆方向の条件付き確率もガウス分布と近似してよい 平均
分散 生成モデルとしての学習の目的 : 最終的な画像の尤度の最大化 ⇨ を(実際には下限を)最大化することが目的となる [Jascha+, 2015]
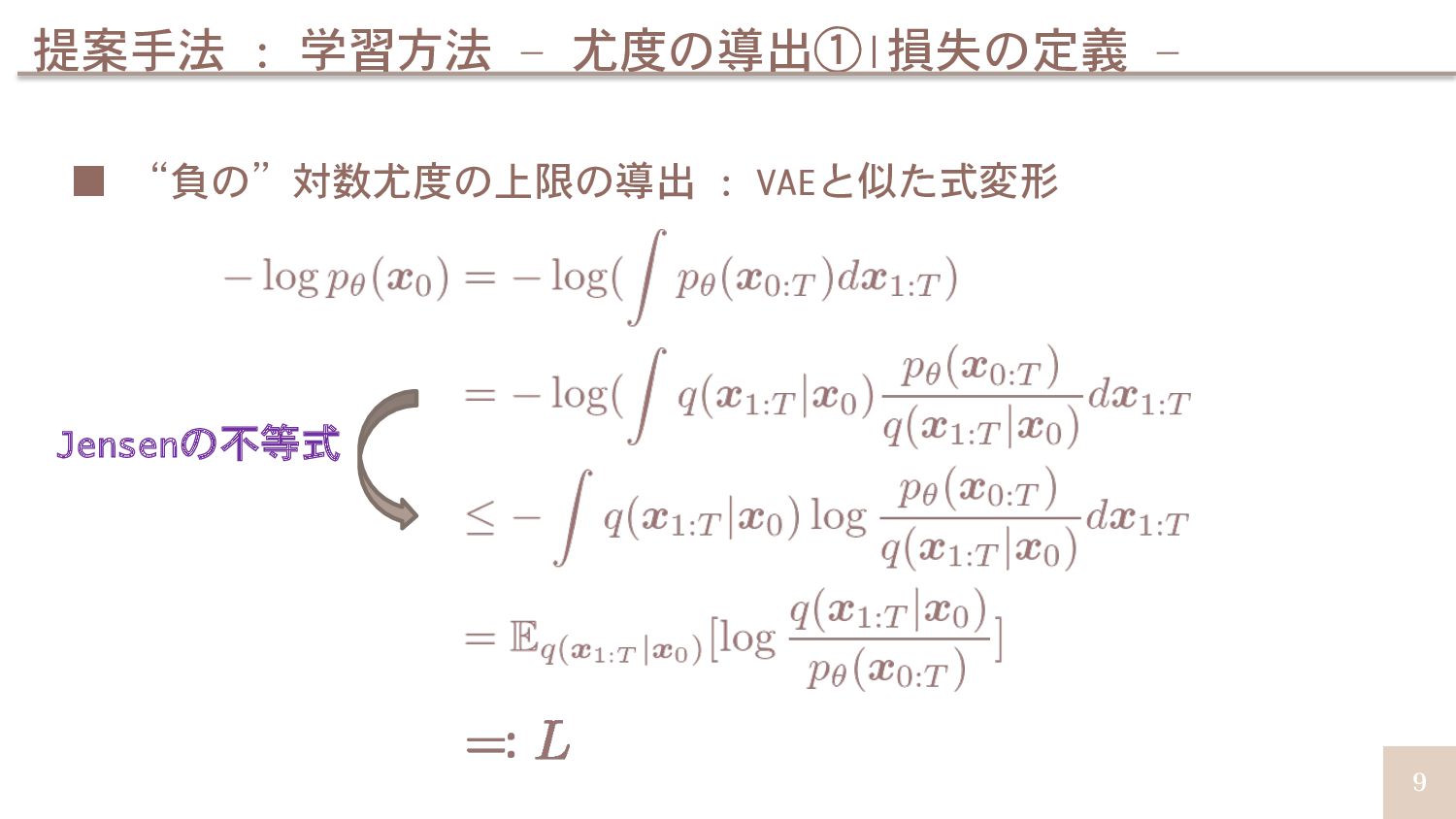
9 提案手法 : 学習方法 – 尤度の導出①|損失の定義 – ▪ “負の”対数尤度の上限の導出 :
VAEと似た式変形 Jensenの不等式
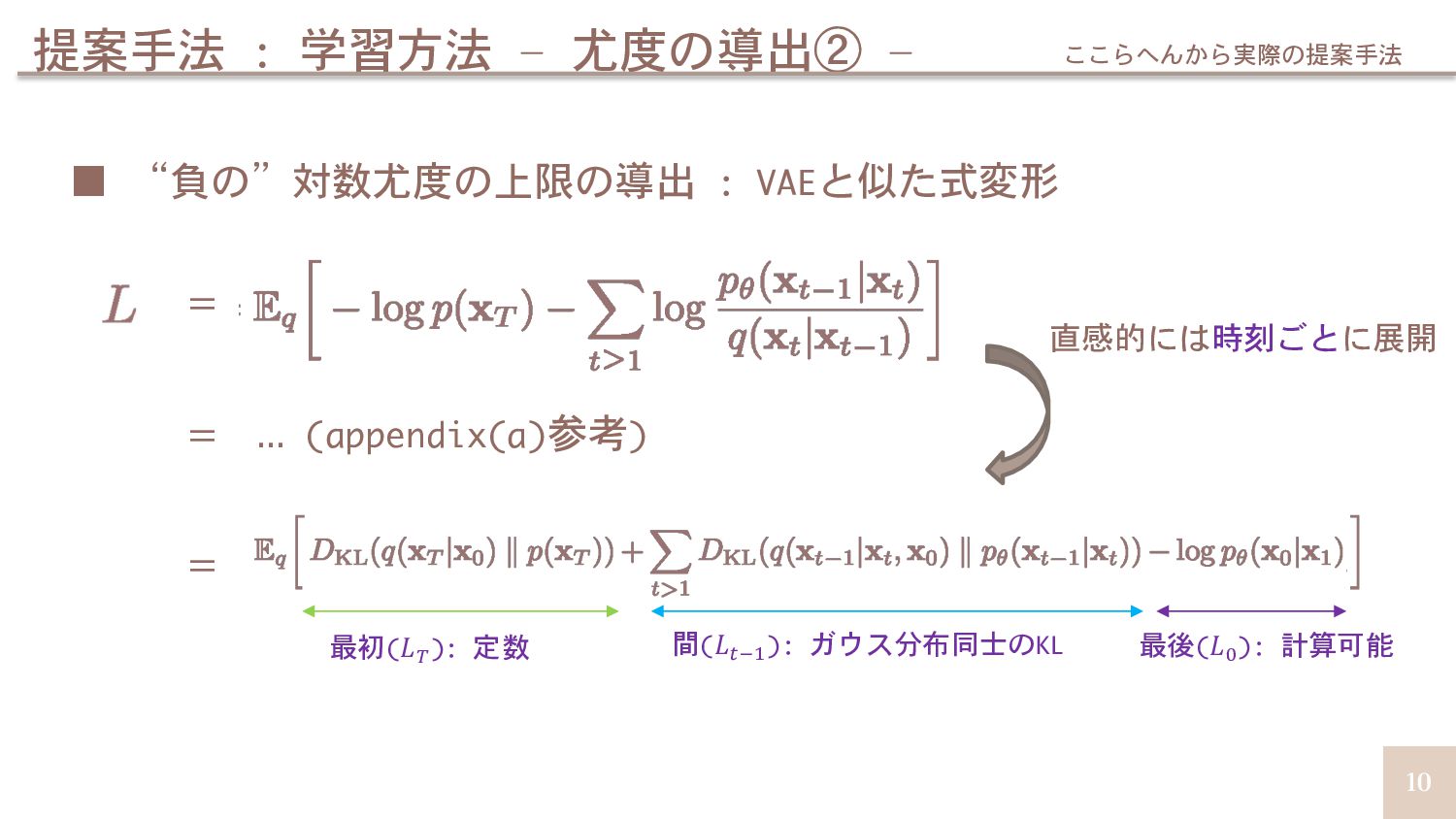
10 提案手法 : 学習方法 – 尤度の導出② – ▪ “負の”対数尤度の上限の導出 :
VAEと似た式変形 = = … (appendix(a)参考) = 直感的には時刻ごとに展開 最初(𝐿! ): 定数 最後(𝐿" ): 計算可能 間(𝐿#$% ): ガウス分布同士のKL ここらへんから実際の提案手法
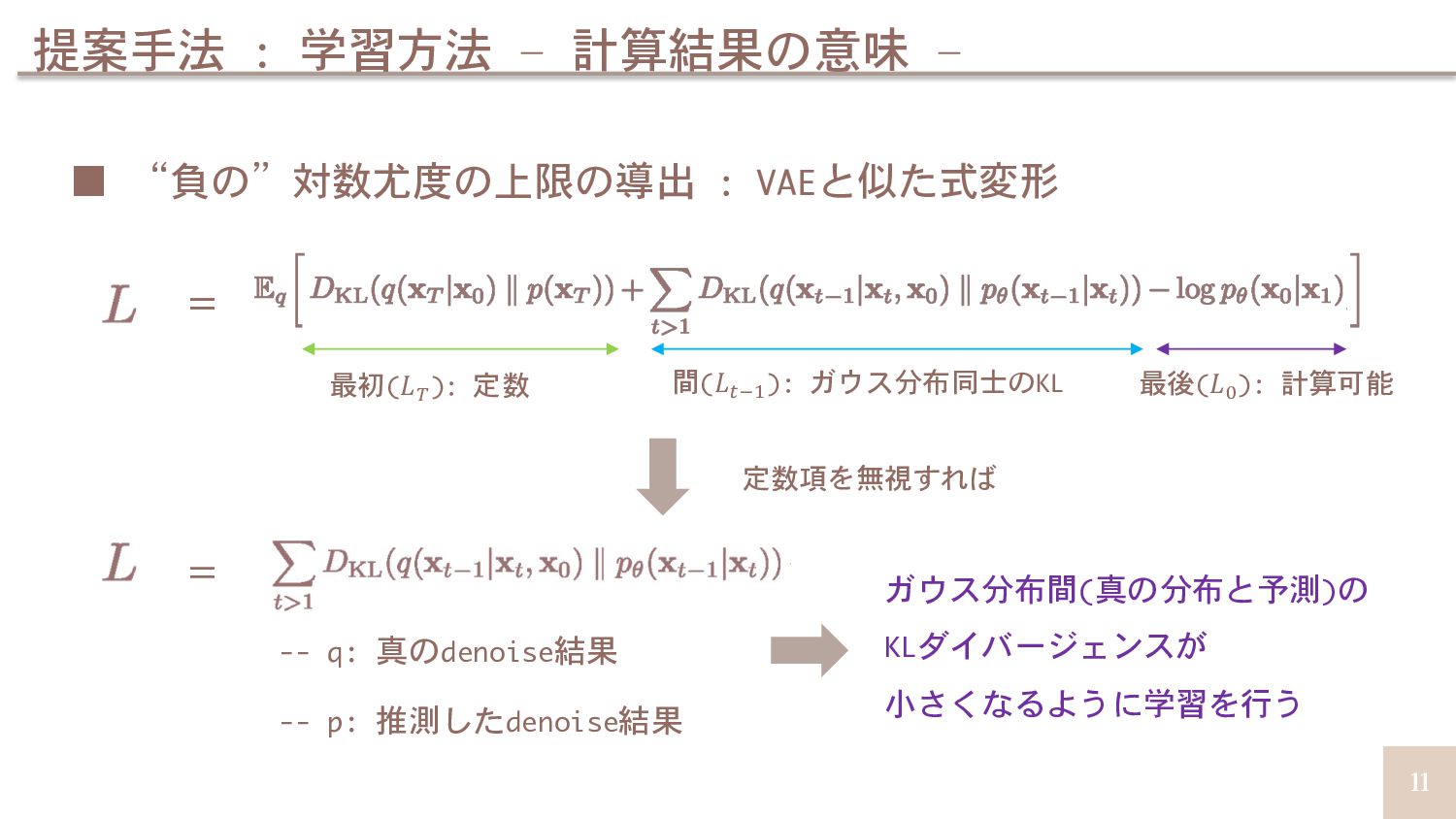
提案手法 : 学習方法 – 計算結果の意味 – ▪ “負の”対数尤度の上限の導出 : VAEと似た式変形
= = 最初(𝐿! ): 定数 最後(𝐿" ): 計算可能 間(𝐿#$% ): ガウス分布同士のKL 定数項を無視すれば ガウス分布間(真の分布と予測)の KLダイバージェンスが 小さくなるように学習を行う -- q: 真のdenoise結果 -- p: 推測したdenoise結果 = 11
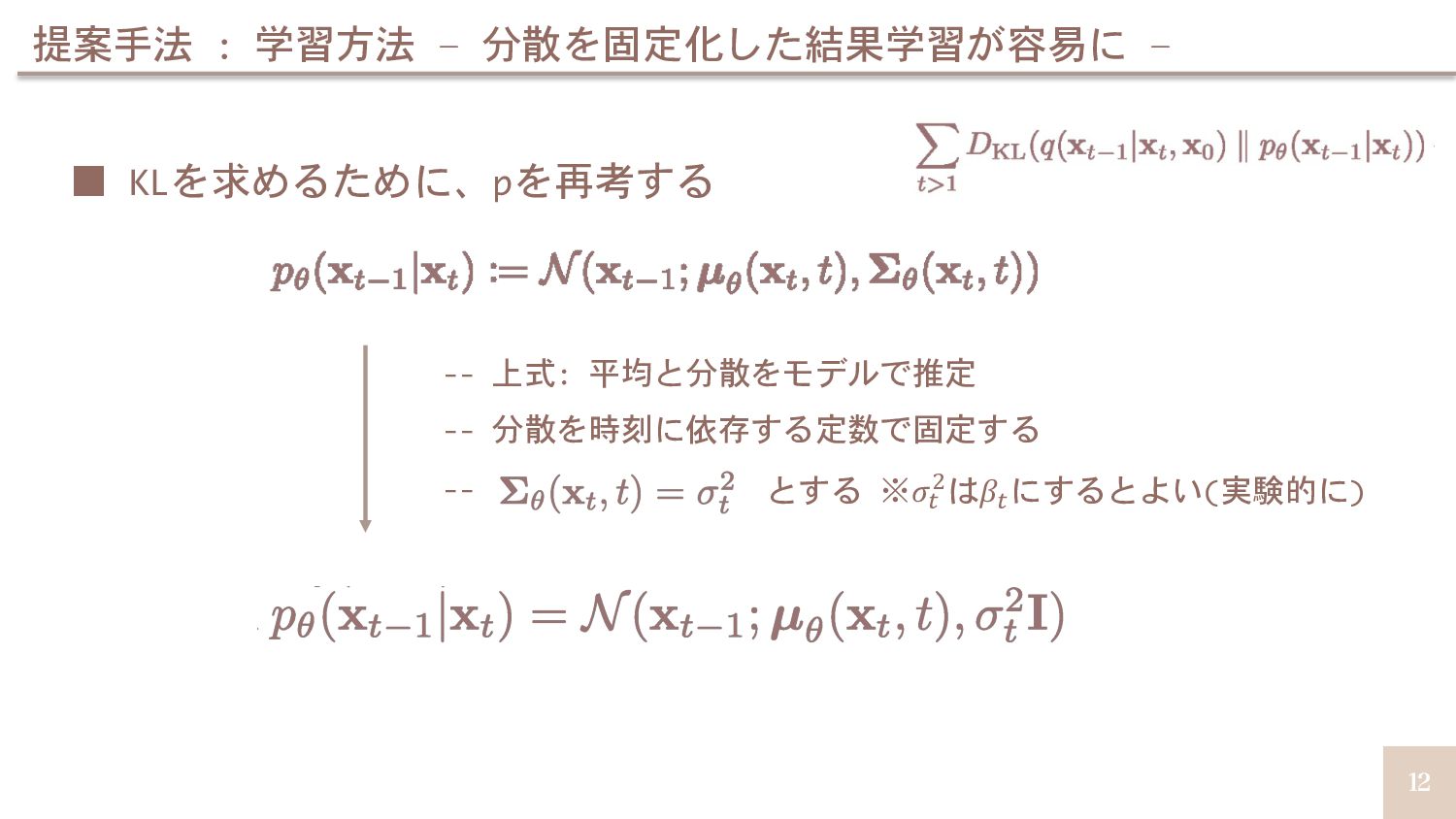
提案手法 : 学習方法 – 分散を固定化した結果学習が容易に – ▪ KLを求めるために、pを再考する -- 上式:
平均と分散をモデルで推定 -- 分散を時刻に依存する定数で固定する -- とする ※𝜎" #は𝛽"にするとよい(実験的に) 12
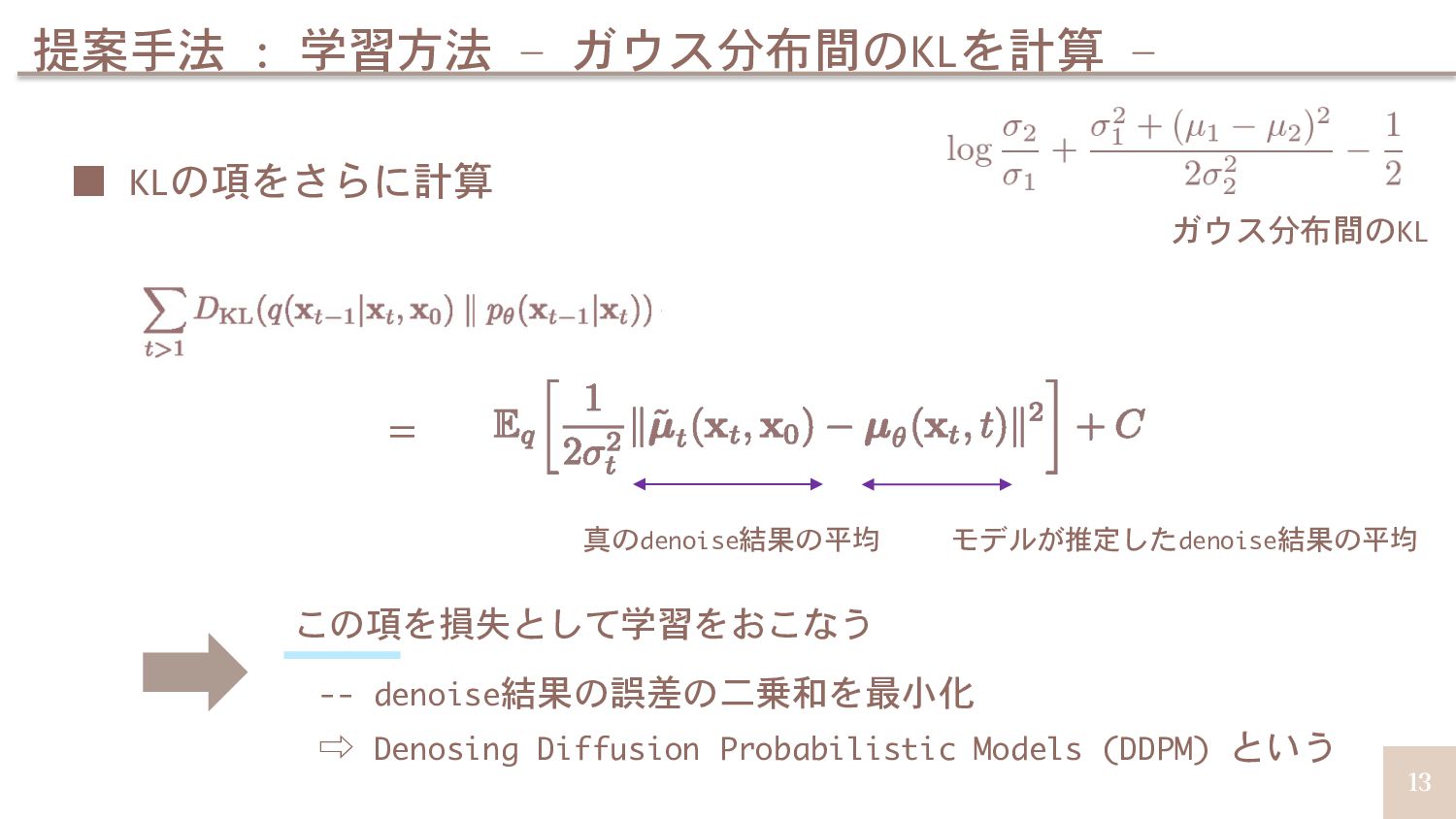
提案手法 : 学習方法 – ガウス分布間のKLを計算 – ▪ KLの項をさらに計算 ガウス分布間のKL =
真のdenoise結果の平均 モデルが推定したdenoise結果の平均 この項を損失として学習をおこなう -- denoise結果の誤差の二乗和を最小化 ⇨ Denosing Diffusion Probabilistic Models (DDPM) という 13
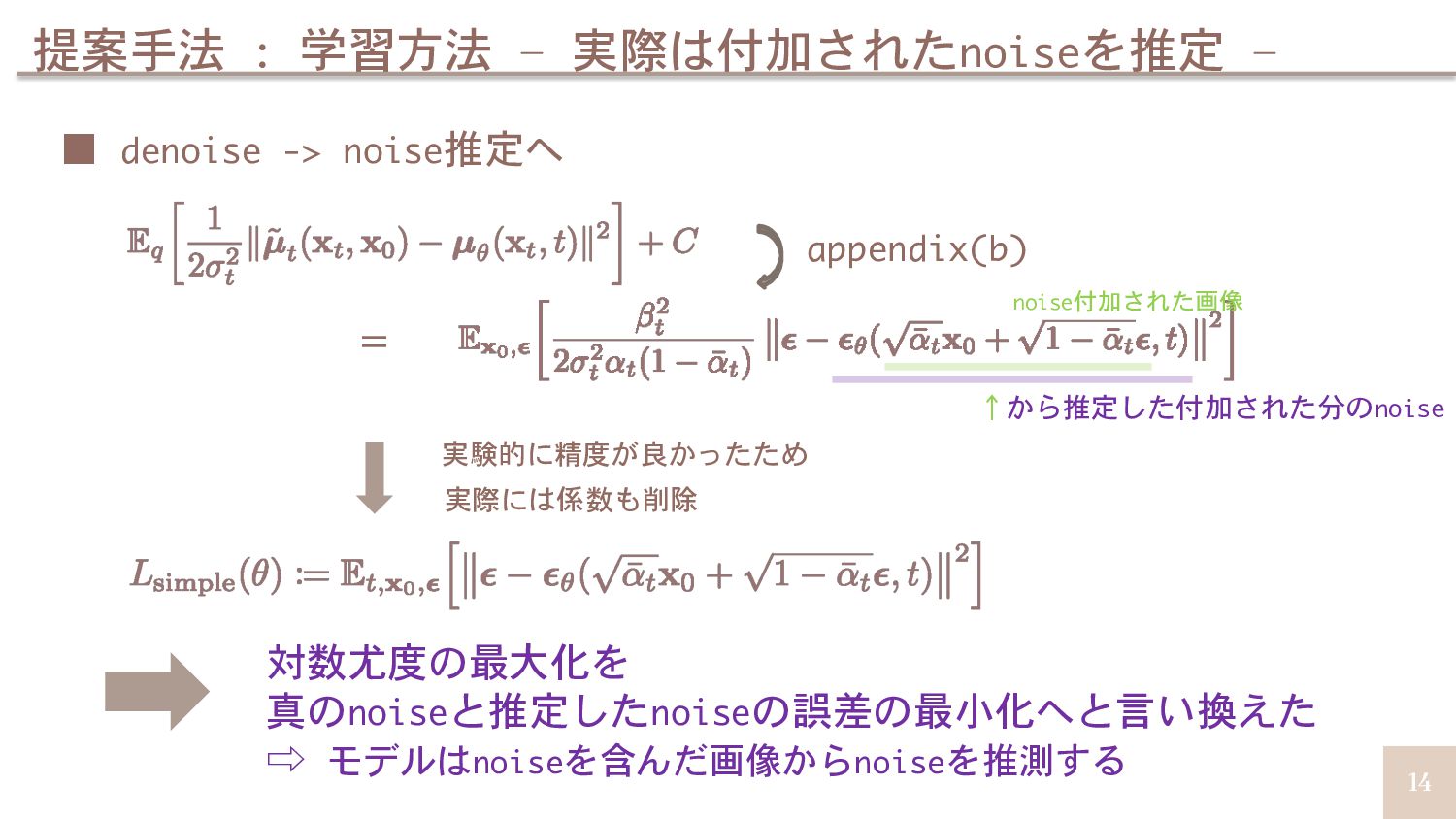
提案手法 : 学習方法 – 実際は付加されたnoiseを推定 – ▪ denoise -> noise推定へ
= noise付加された画像 ↑から推定した付加された分のnoise 対数尤度の最大化を 真のnoiseと推定したnoiseの誤差の最小化へと言い換えた ⇨ モデルはnoiseを含んだ画像からnoiseを推測する appendix(b) 実際には係数も削除 実験的に精度が良かったため 14
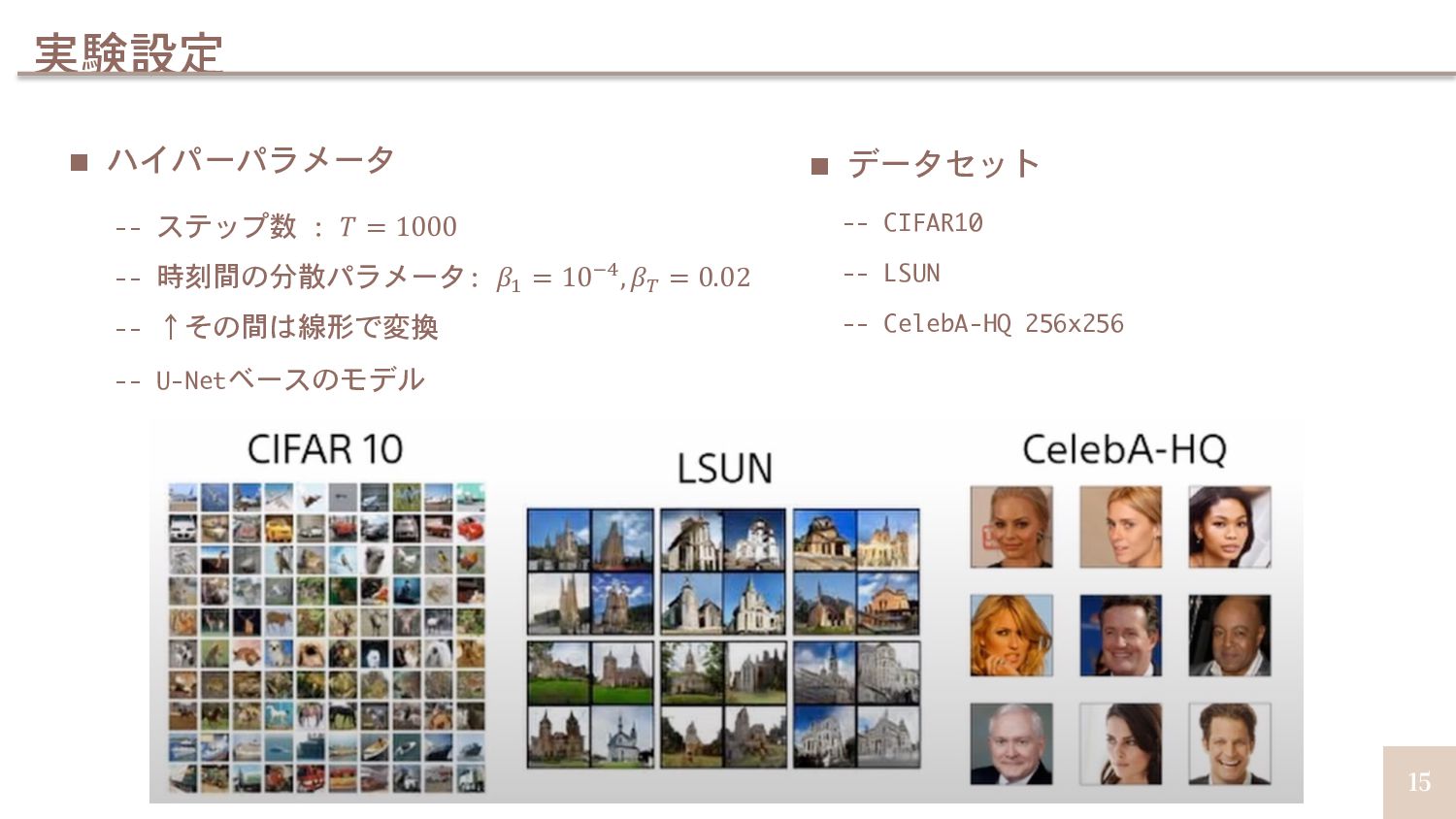
15 実験設定 ▪ ハイパーパラメータ -- ステップ数 : 𝑇 = 1000
-- 時刻間の分散パラメータ: 𝛽% = 10$&, 𝛽! = 0.02 -- ↑その間は線形で変換 -- U-Netベースのモデル ▪ データセット -- CIFAR10 -- LSUN -- CelebA-HQ 256x256
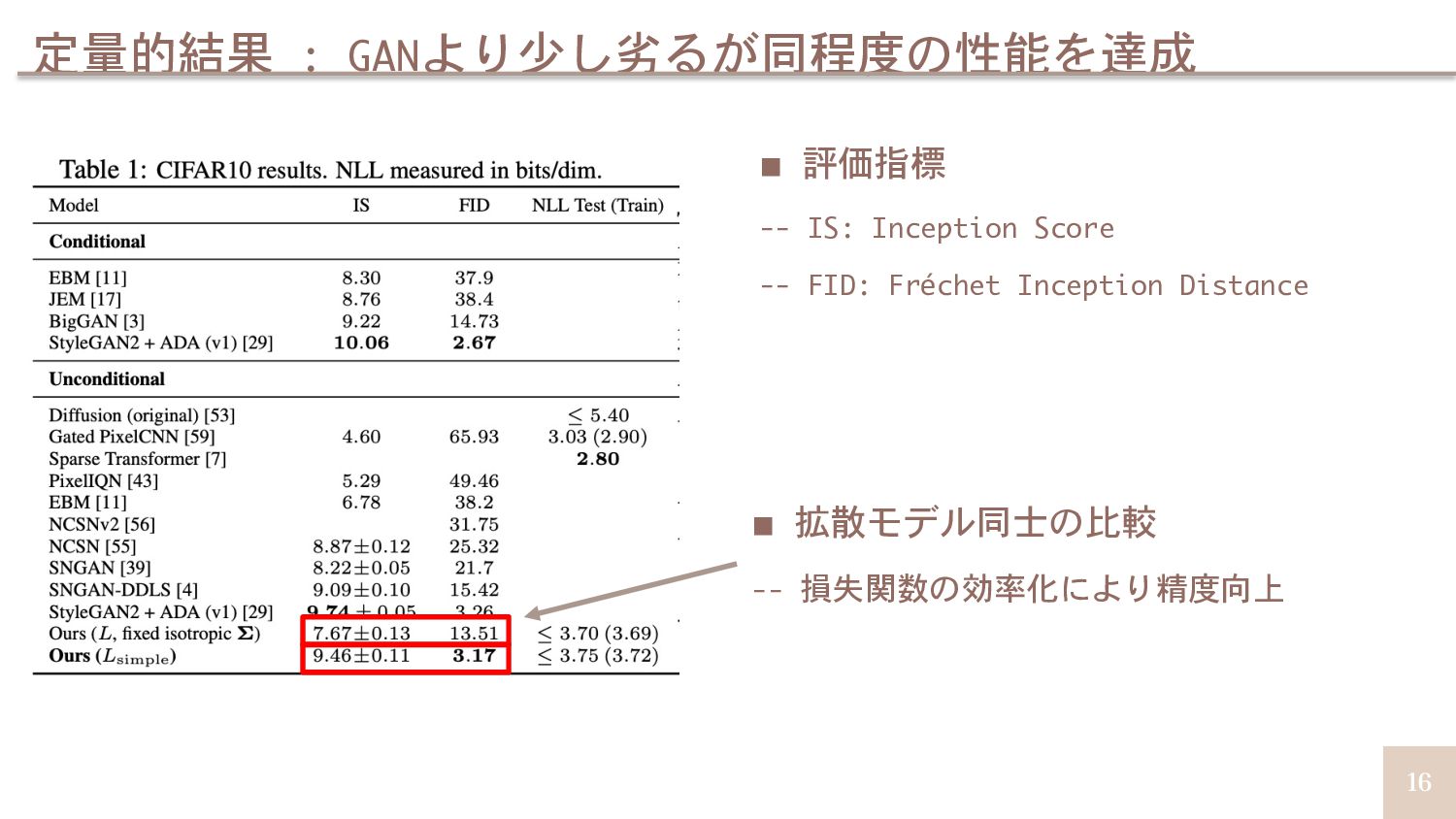
16 定量的結果 : GANより少し劣るが同程度の性能を達成 ▪ 評価指標 -- IS: Inception Score
-- FID: Fréchet Inception Distance ▪ 拡散モデル同士の比較 -- 損失関数の効率化により精度向上
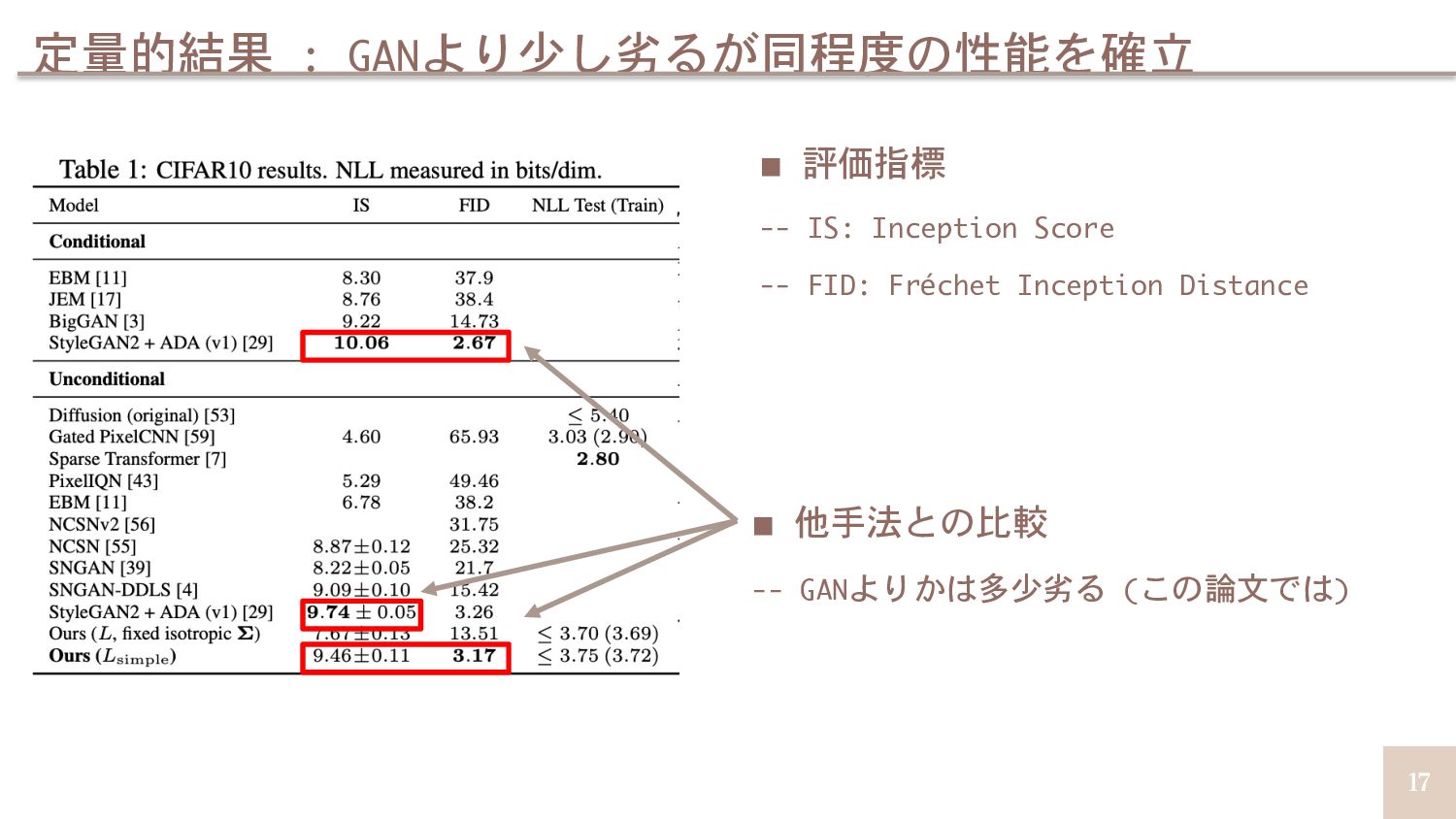
17 定量的結果 : GANより少し劣るが同程度の性能を確立 ▪ 評価指標 -- IS: Inception Score
-- FID: Fréchet Inception Distance ▪ 他手法との比較 -- GANよりかは多少劣る (この論文では)
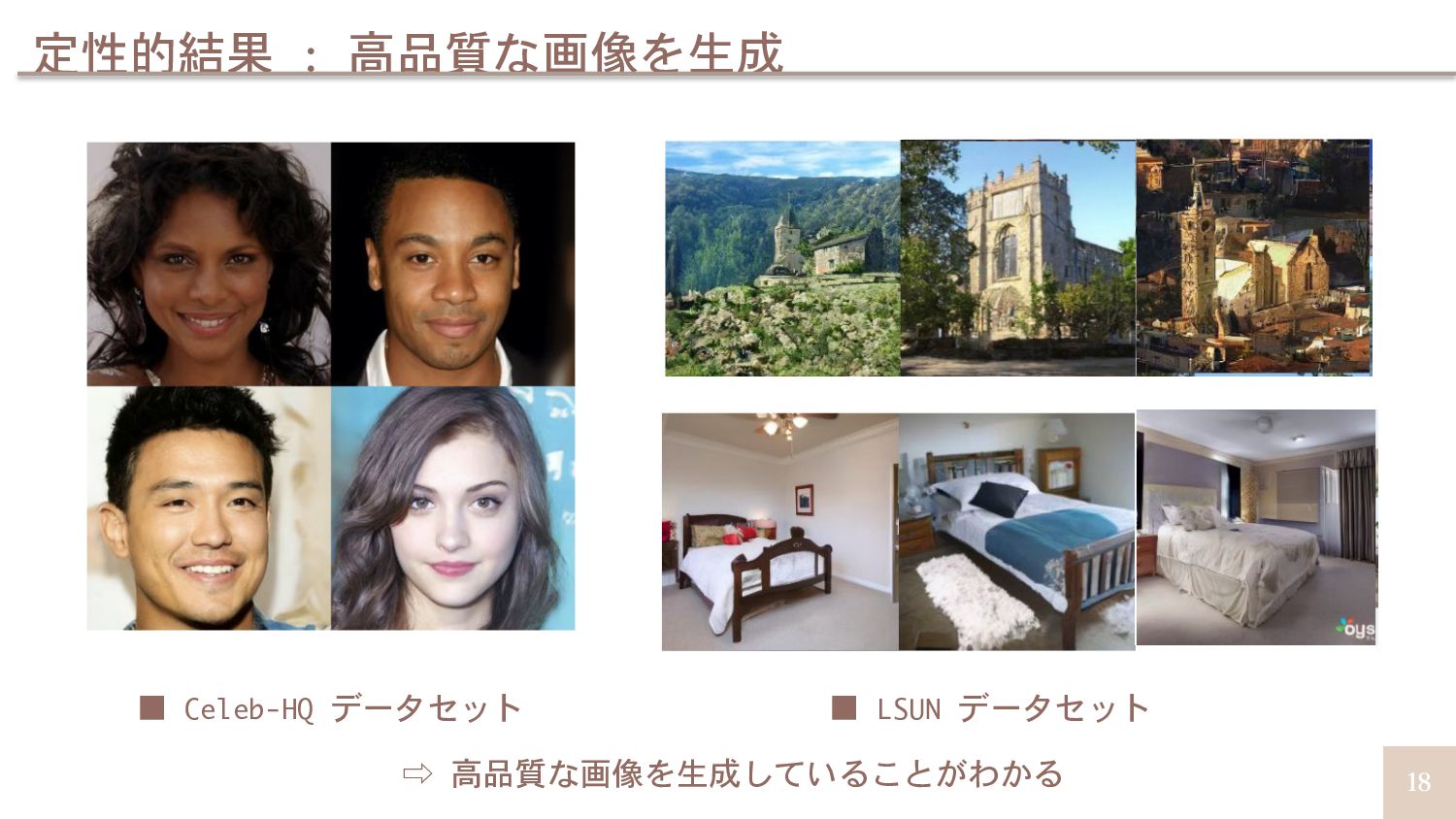
18 定性的結果 : 高品質な画像を生成 ▪ Celeb-HQ データセット ▪ LSUN データセット
⇨ 高品質な画像を生成していることがわかる
19 まとめ ・(DDPMによる生成方法とLangevin動力学との関連を示した) ・ 損失関数を解析容易にすることで、 拡散モデルを用いた高品質な画像の生成を可能にした ・実験結果から、既存手法と同精度の画像を生成することを 定量的、定性的に示した
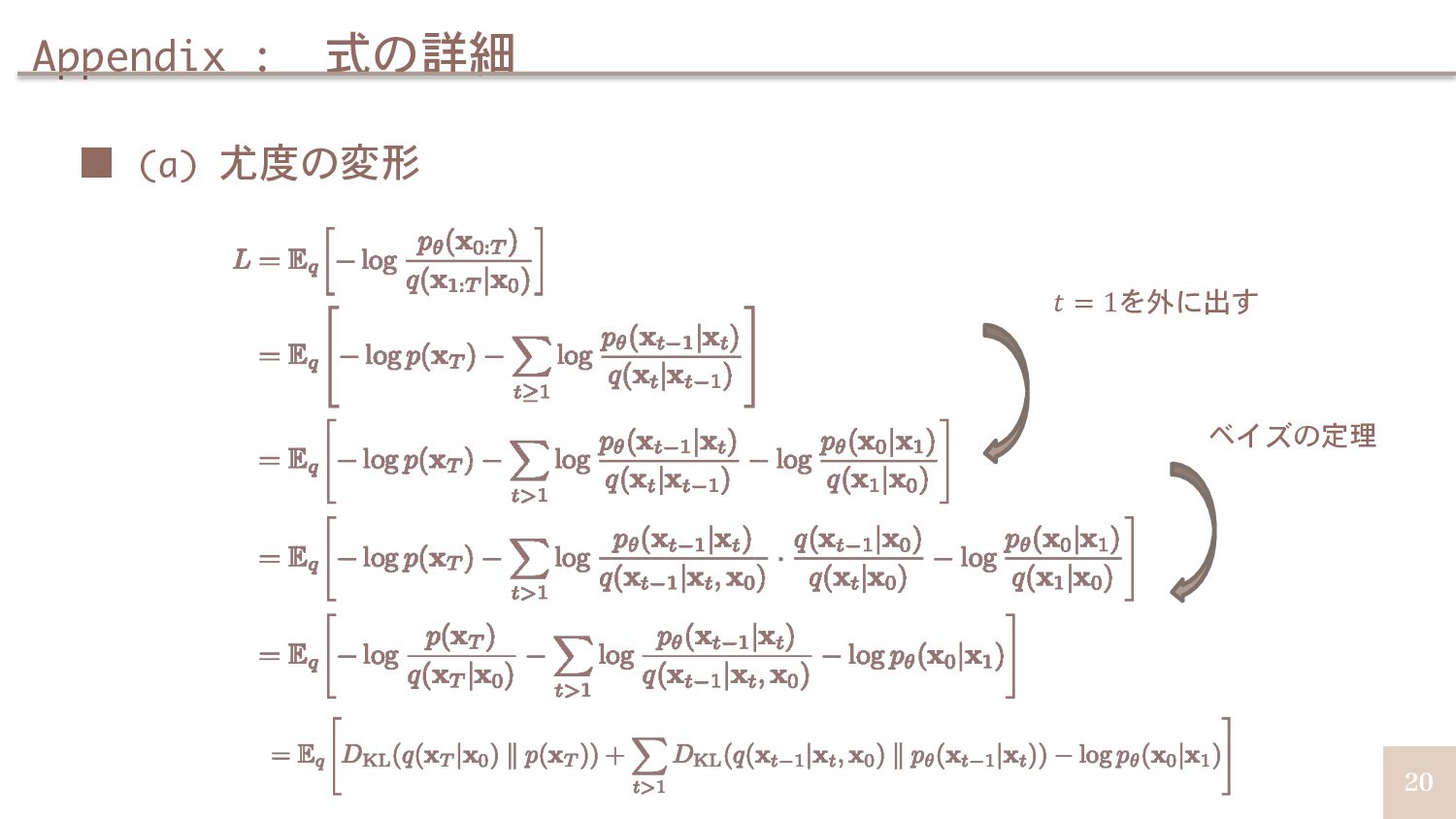
20 Appendix : 式の詳細 ▪ (a) 尤度の変形 𝑡 = 1を外に出す
ベイズの定理
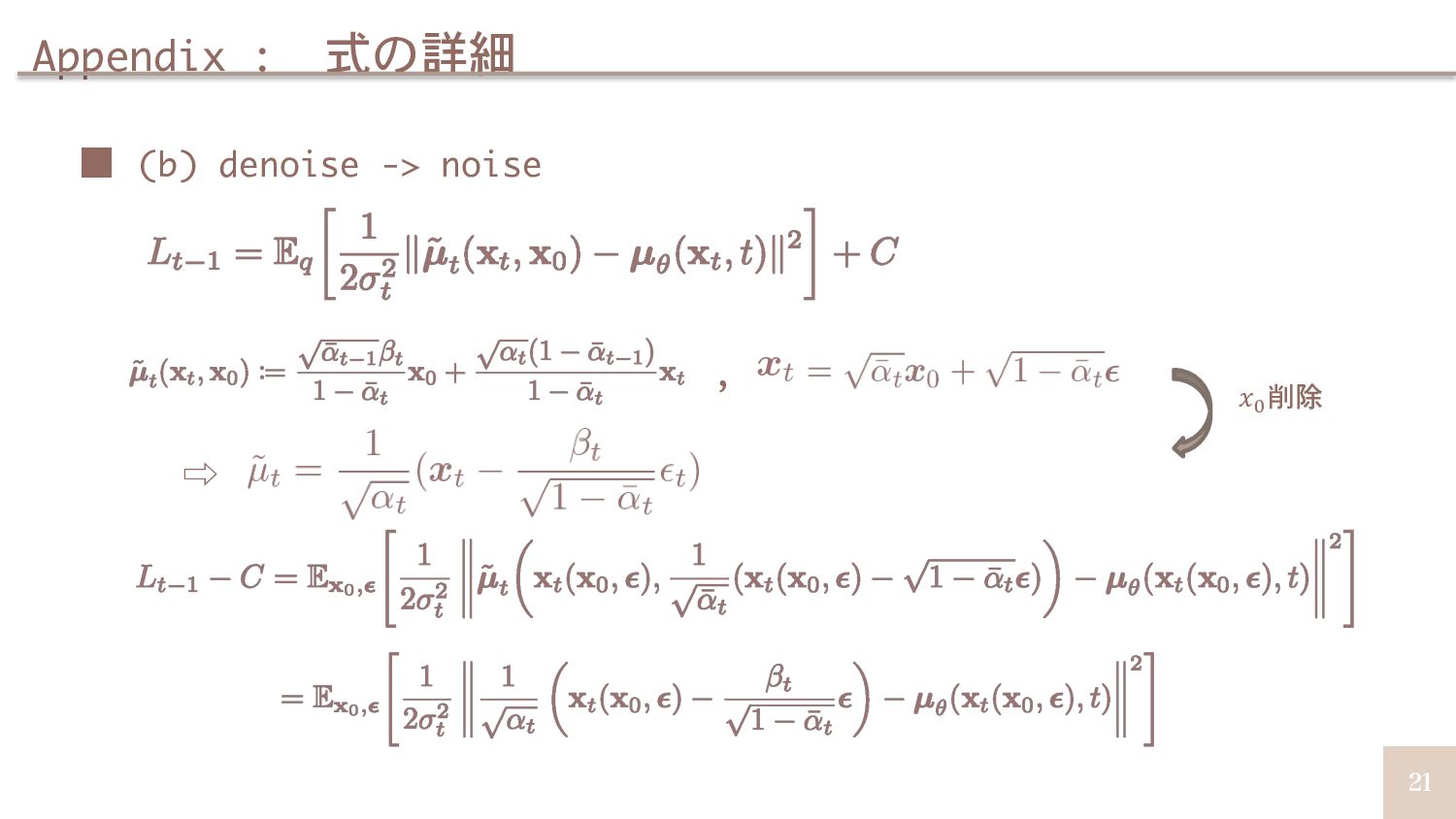
21 Appendix : 式の詳細 ▪ (b) denoise -> noise ,
⇨ 𝑥" 削除
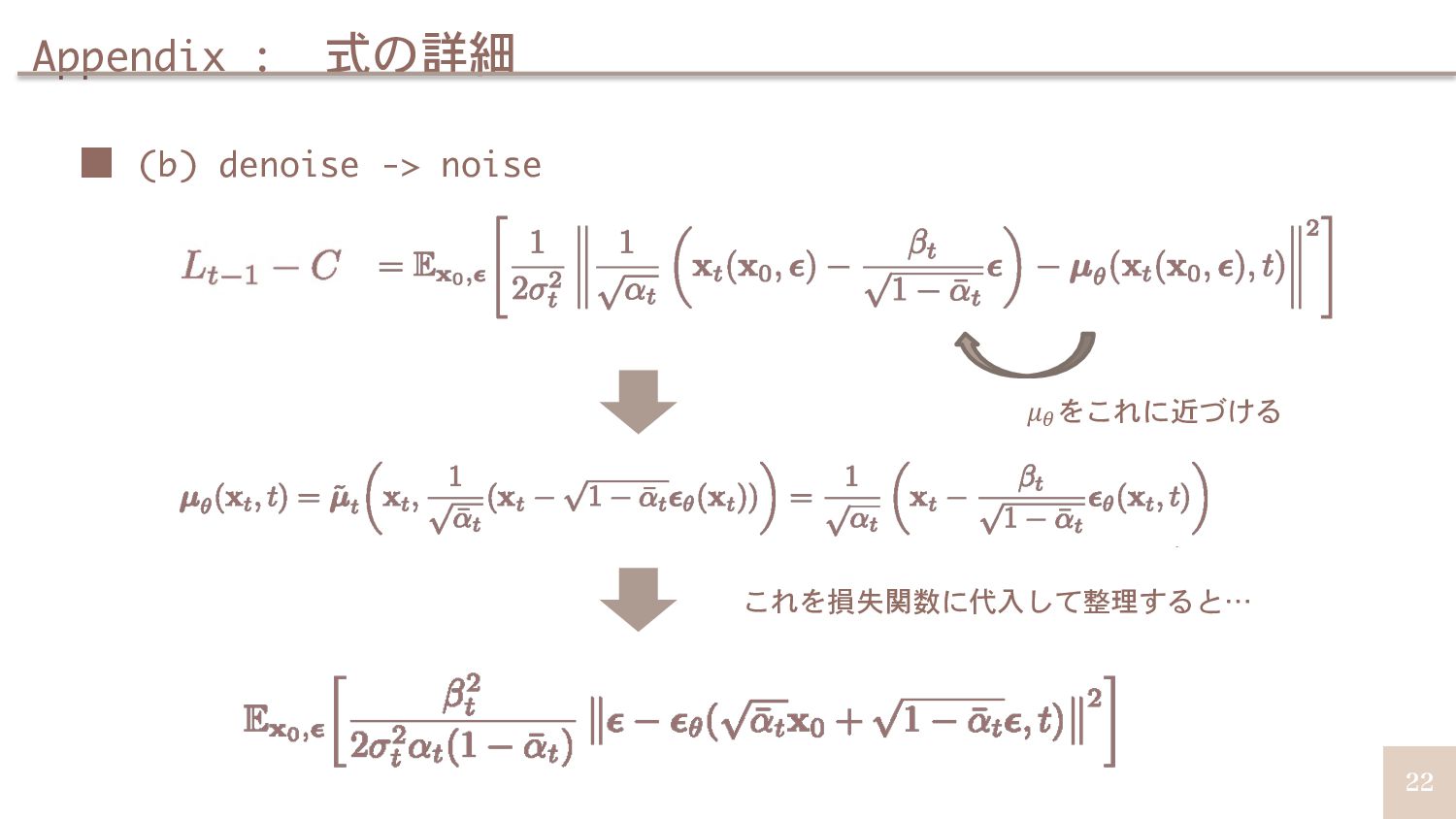
22 Appendix : 式の詳細 ▪ (b) denoise -> noise 𝜇'をこれに近づける
これを損失関数に代入して整理すると…
23 Appendix : モデル図の概要 [参考2]
24 Appendix : 参考文献 (1) SONY解説動画 https://www.youtube.com/watch?v=G4tGMueM6lg (2) SONY解説動画https://www.youtube.com/watch?v=10ki2IS55Q4 (3)
Zenn “What are Diffusion Models?” https://zenn.dev/nakky/articles/09fb1804001ff8 (4) 各評価指標の解説記事 : https://qiita.com/kzykmyzw/items/5c4a6c2ee19ddd59e810#f r%C3%A9chet-inception-distance-fid-2
{kind=link}
{kind=link}
![3 背景 : Diffusion Probabilistic Models[Jascha+, ICML15] ▪ Diffusion Probabilistic](https://files.speakerdeck.com/presentations/8676cc157723477bb40d304f114aeb65/slide_2.jpg){kind=link}
![4 関連研究 : 深層生成モデルは高品質かつ多様な画像生成は困難である 深層生成モデル 概要 VAEs VAE[D.P.Kingma+, ICLR2014] Encoder-Decoderと変分法を利用した](https://files.speakerdeck.com/presentations/8676cc157723477bb40d304f114aeb65/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![23 Appendix : モデル図の概要 [参考2]](https://files.speakerdeck.com/presentations/8676cc157723477bb40d304f114aeb65/slide_22.jpg){kind=link}
{kind=link}