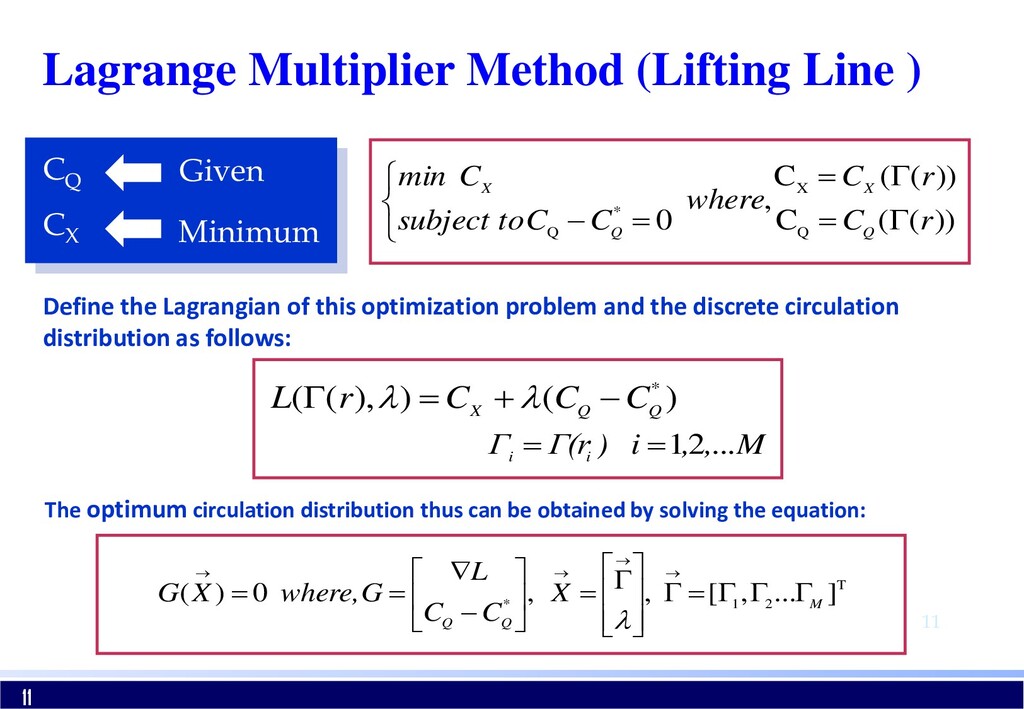
Given Define the Lagrangian of this optimization problem and the discrete circulation distribution as follows: ) ( ) ), ( ( * Q Q X C C C r L − + = = = = − )) ( ( C )) ( ( C , 0 Q X * Q r C r C where C C subject to C min Q X Q X ] ... , [ , , 0 ) ( T 2 1 * M Q Q X C C L G where, X G = = − = = → → → → ,...M , ) i Γ(r Γ i i 2 1 = = The optimum circulation distribution thus can be obtained by solving the equation: 11
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![32 Thank You for listening [email protected]](https://files.speakerdeck.com/presentations/868f200c71cf4a5a9be6157714d0aaf8/slide_32.jpg){kind=link}