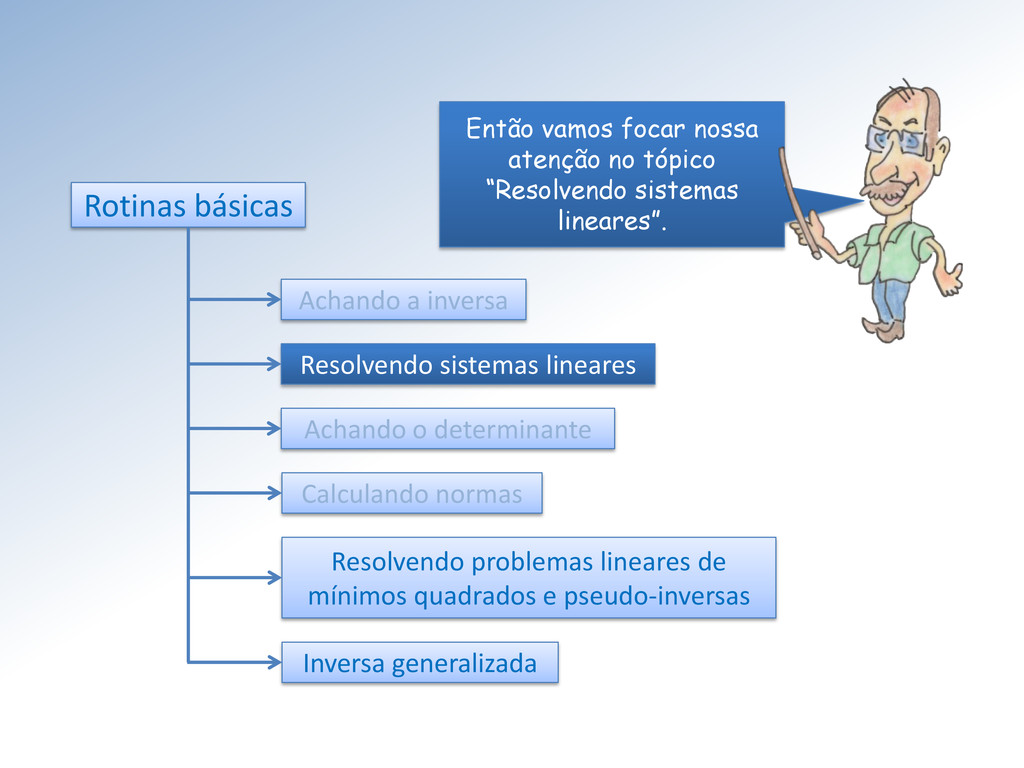
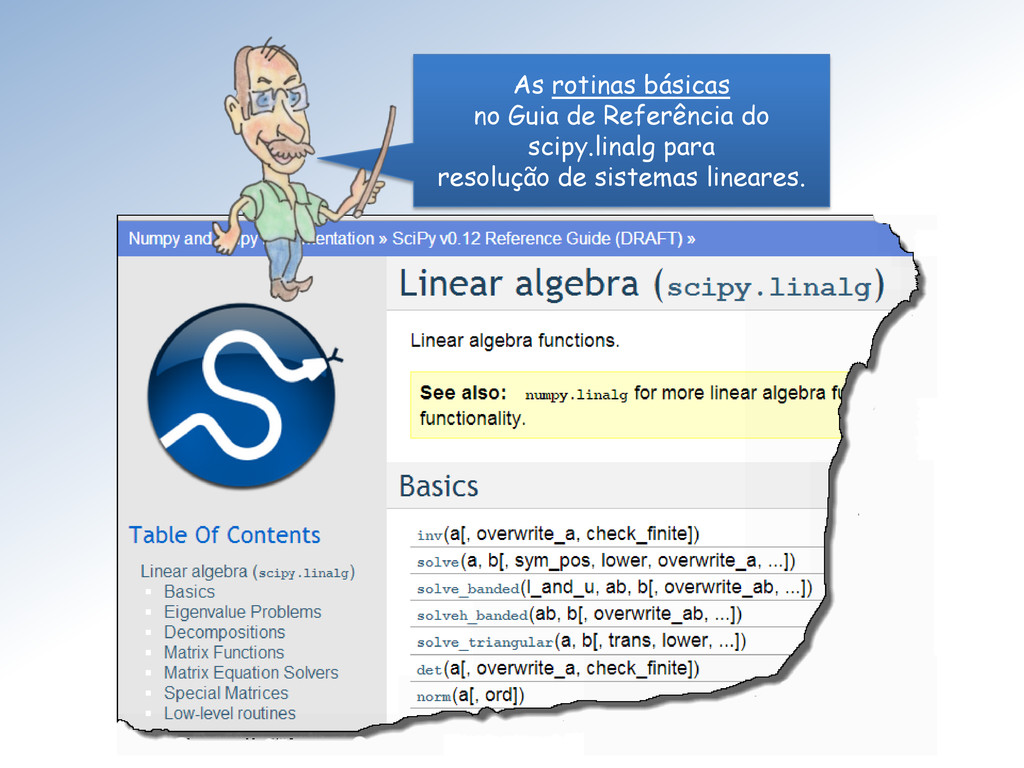
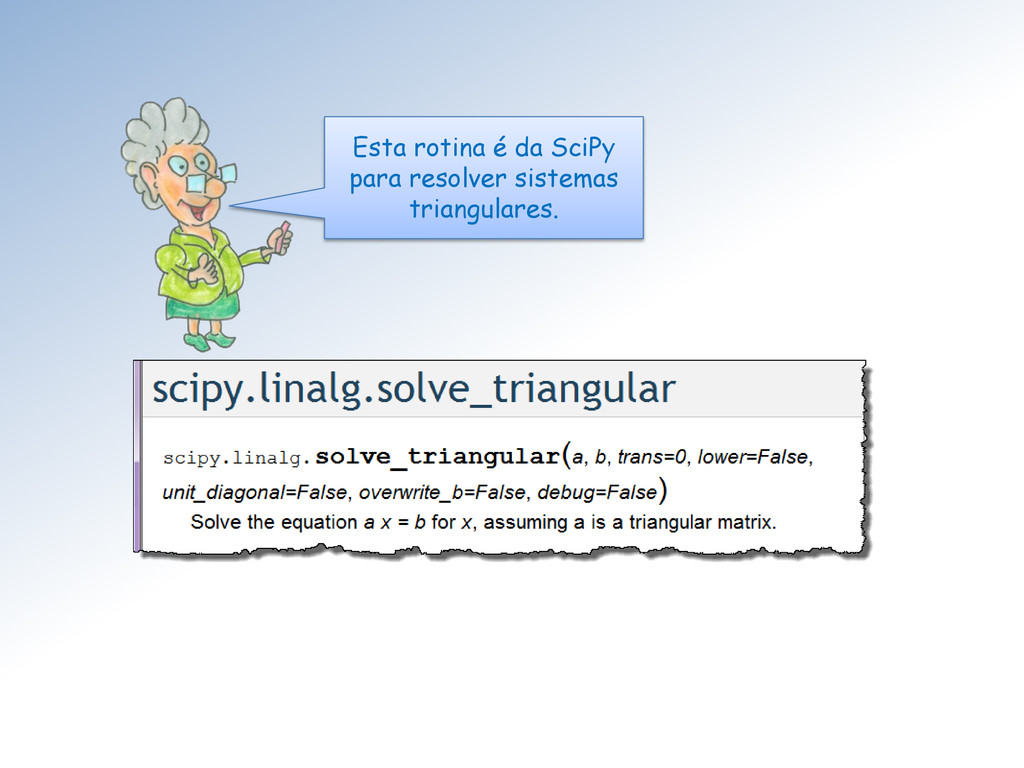
Iniciamos falando sobre a BLAS e a LAPACK e passamos às rotinas básicas da sipy.linalg para solução de sistemas lineares (solve, solve_triang., solve_banded, etc). Depois estudamos as fatorações LU e Cholesky.
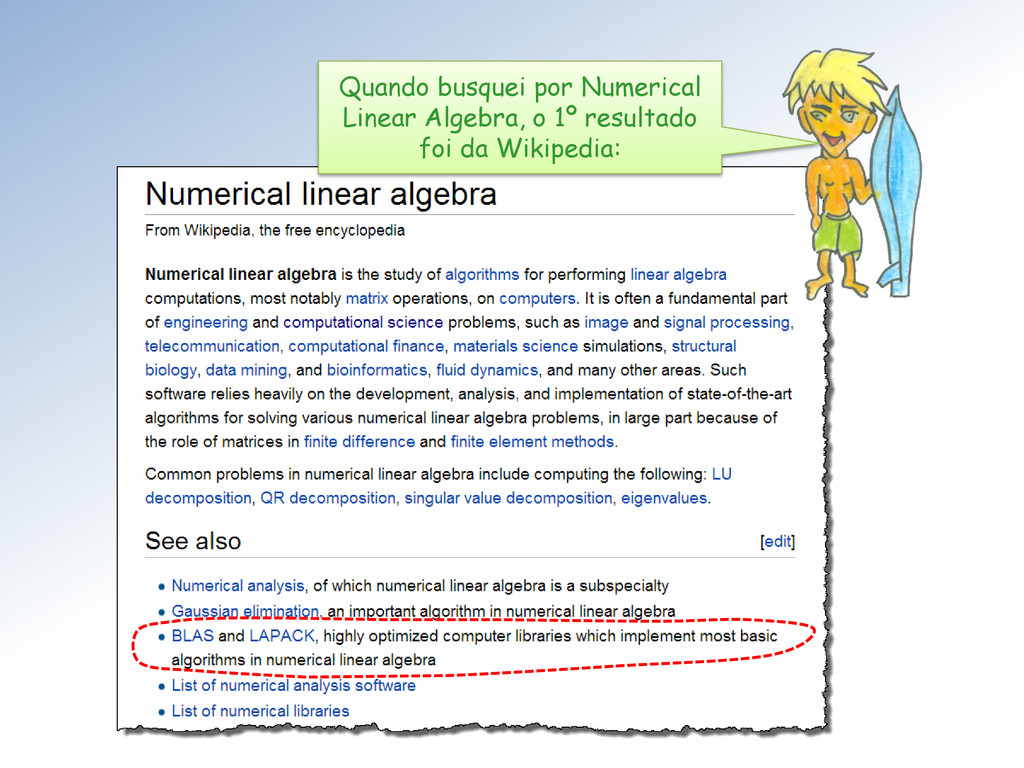
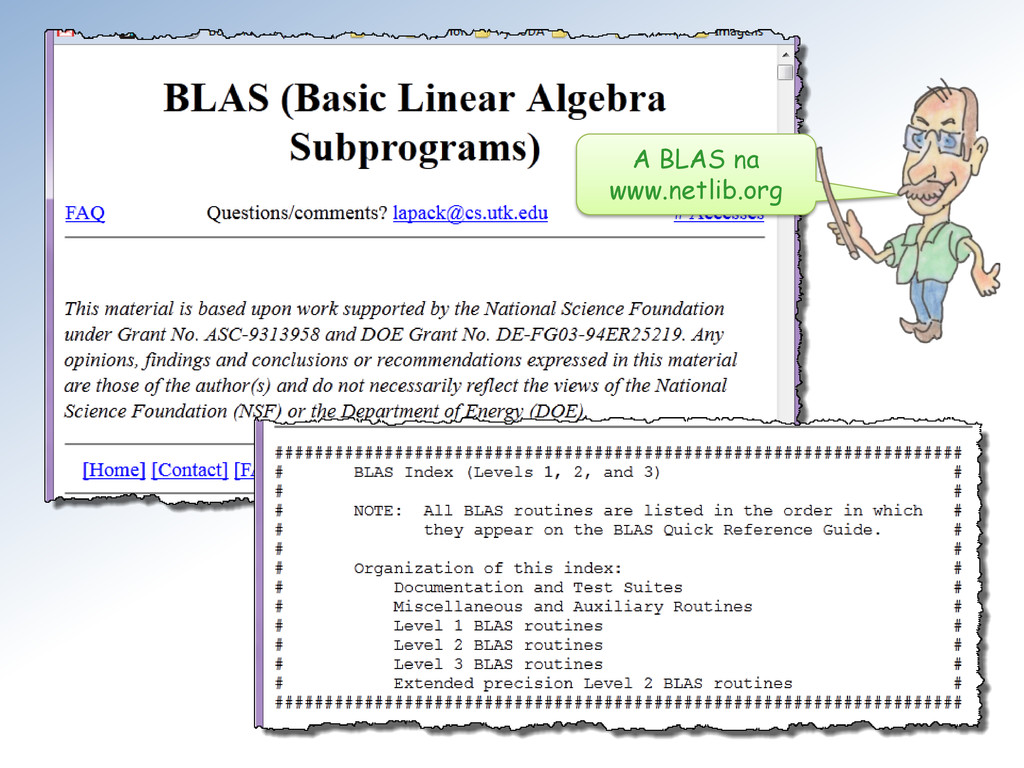
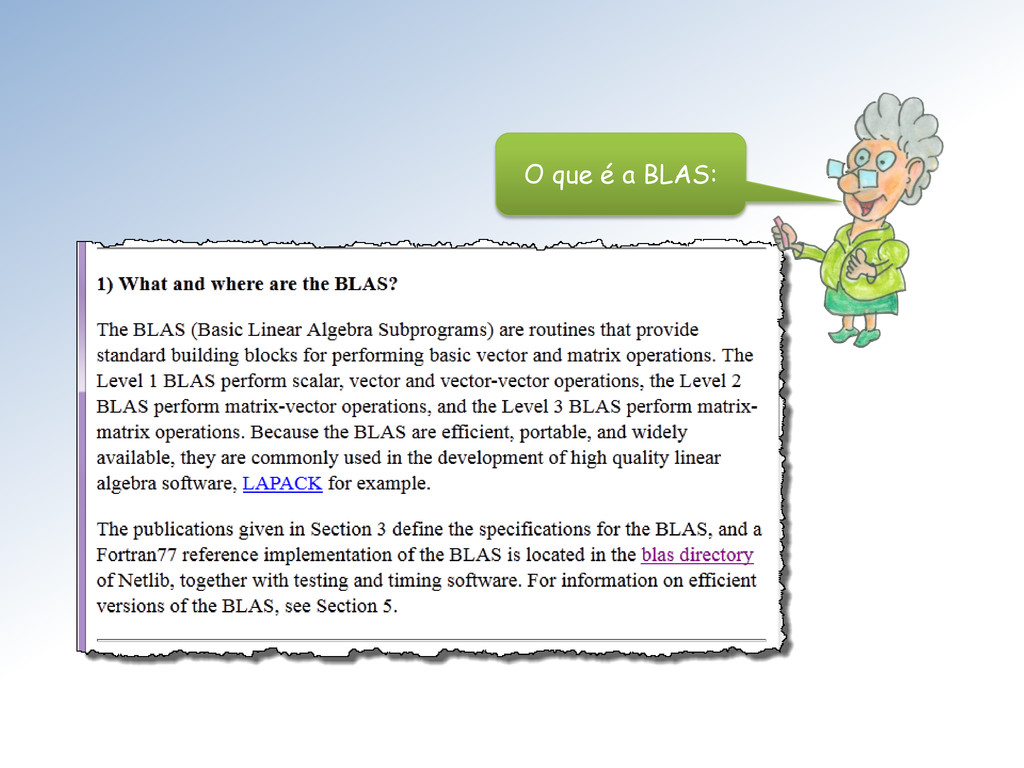
Package. Repetindo: BLAS e LAPACK, bibliotecas altamente otimizadas que implementam os algoritmos básicos de Álgebra Linear Computacional. Não deixem de olhar as listas indicadas de software de análise numérica e de bibliotecas numéricas.
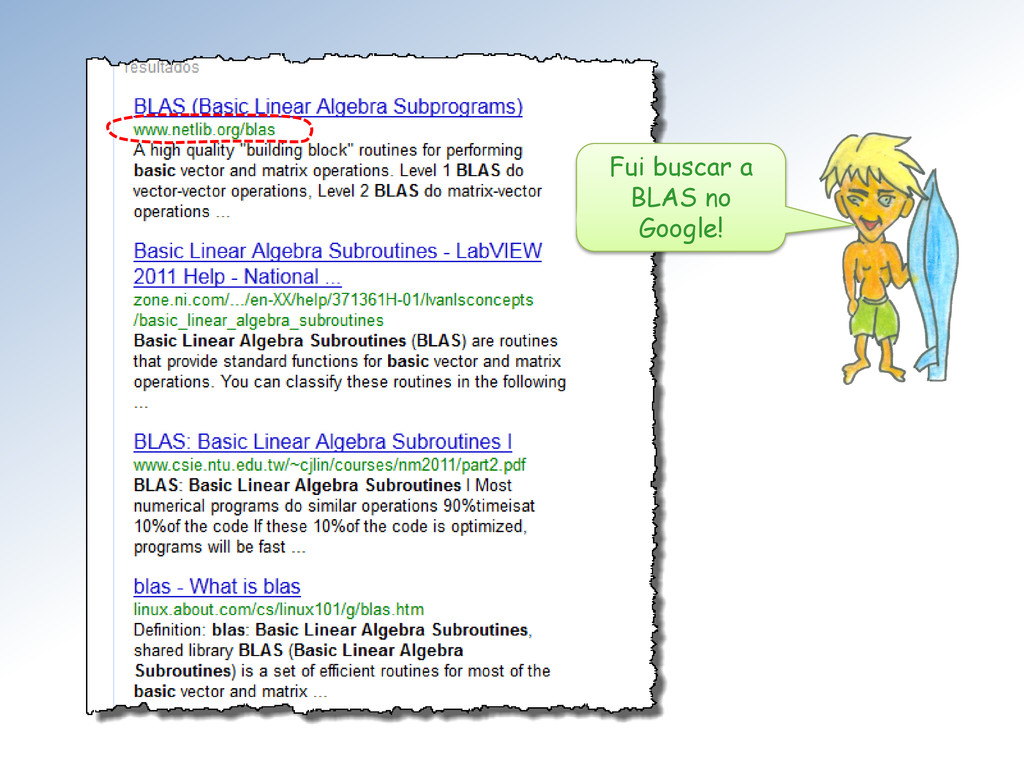
comunidade de Computação Científica, tem trabalhado arduamente no desenvolvimento da Álgebra Linear Computacional. Em particular na resolução de sistemas lineares. Mestre, descobri o caminho das pedras. Muito mais que isto, percebi claramente a importância das bibliotecas BLAS e LAPACK !
a tática de operacionalizar primeiro. Depois vamos analisar os aspectos teóricos. Não gosto muito dessa ideia, mas como acredito na sua experiência didática, concordo!
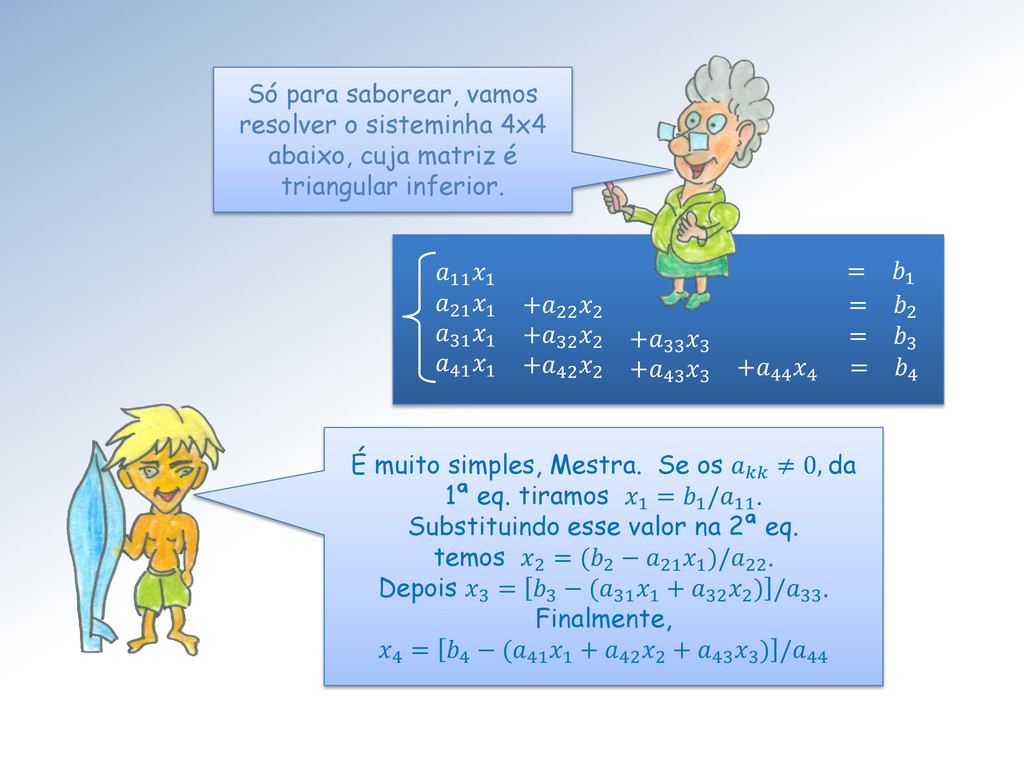
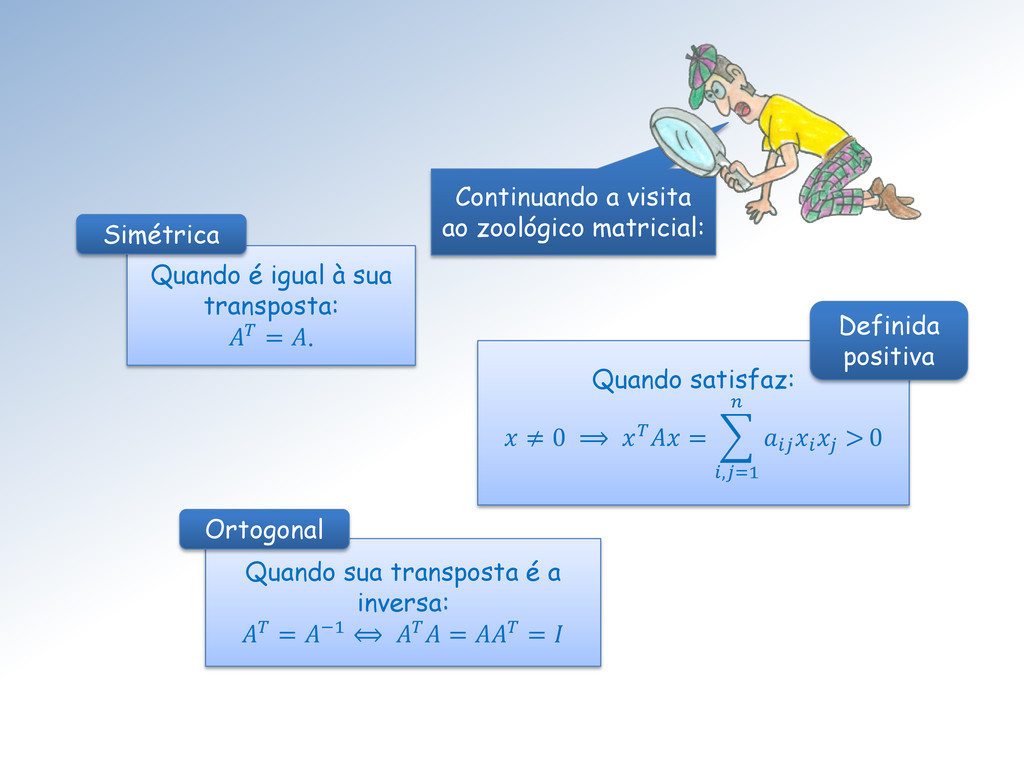
roteiro para estudar os métodos de resolução do sistema. Tipo da matriz A em Ax = b: 1. Triangular 2. Genérica 3. De banda 4. Simétrica e definida positiva (hermitiana)
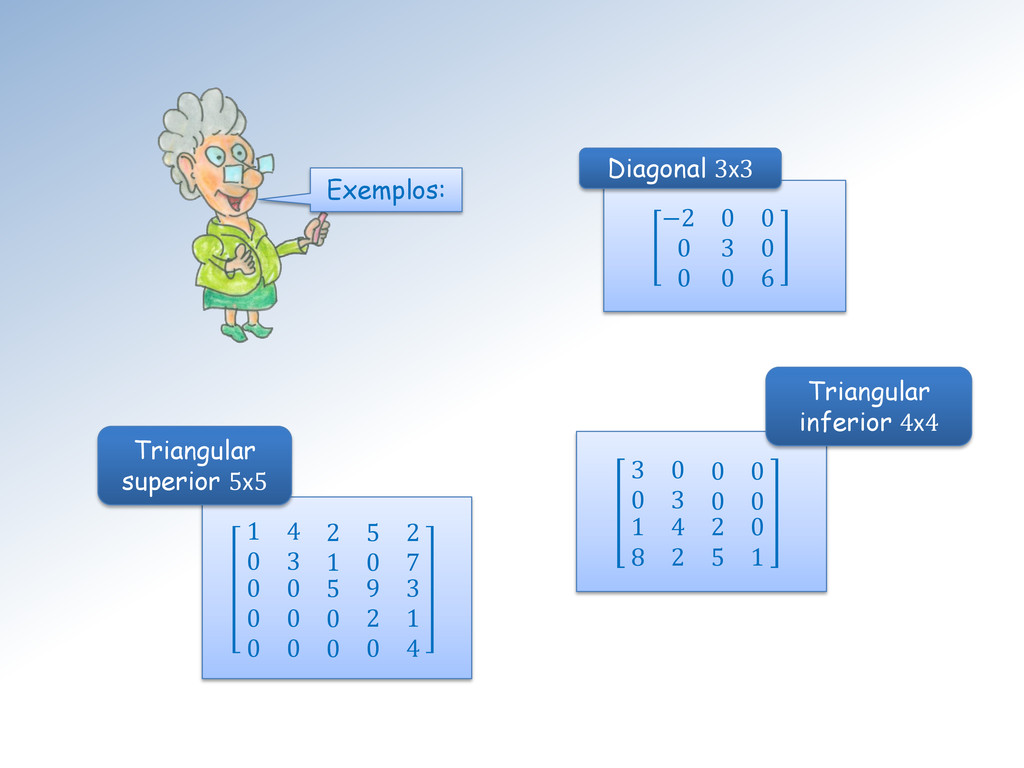
cujas definições devemos recordar: Quando todos os seus elementos fora da diagonal são nulos: ≠ ⟹ = 0 Diagonal Quando todos os elementos acima da diagonal são nulos: < ⟹ = 0 Triangular inferior Quando todos os elementos abaixo da diagonal são nulos: > ⟹ = 0 Triangular superior
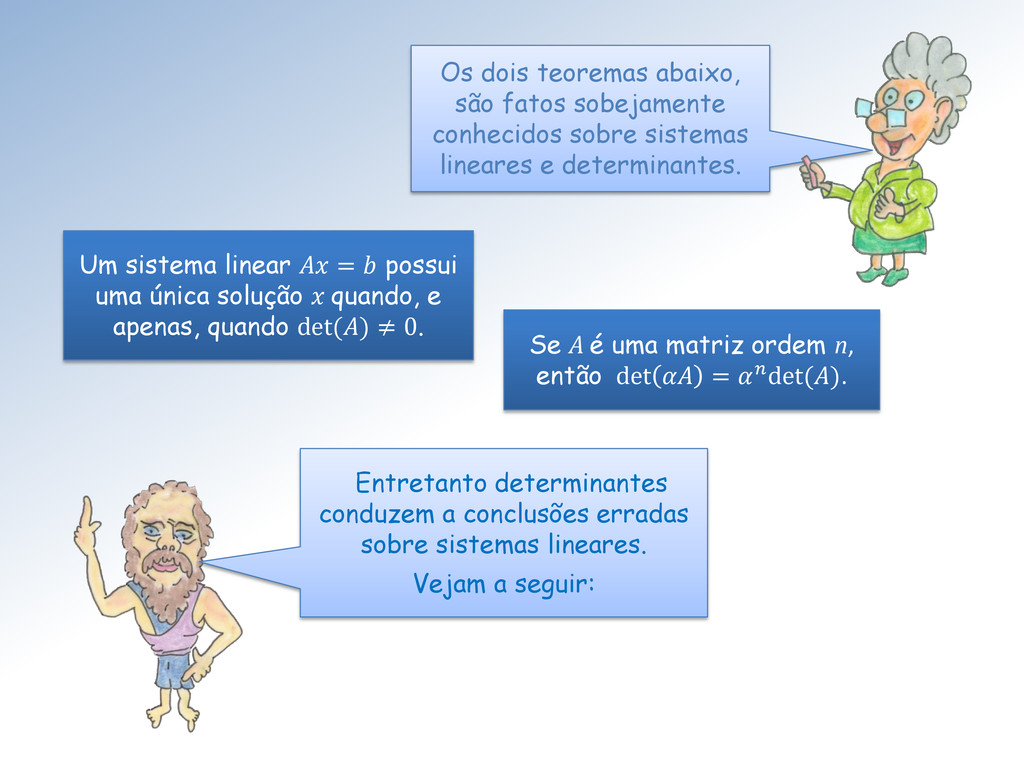
det (). Um sistema linear = possui uma única solução quando, e apenas, quando det () ≠ 0. Os dois teoremas abaixo, são fatos sobejamente conhecidos sobre sistemas lineares e determinantes. Entretanto determinantes conduzem a conclusões erradas sobre sistemas lineares. Vejam a seguir:
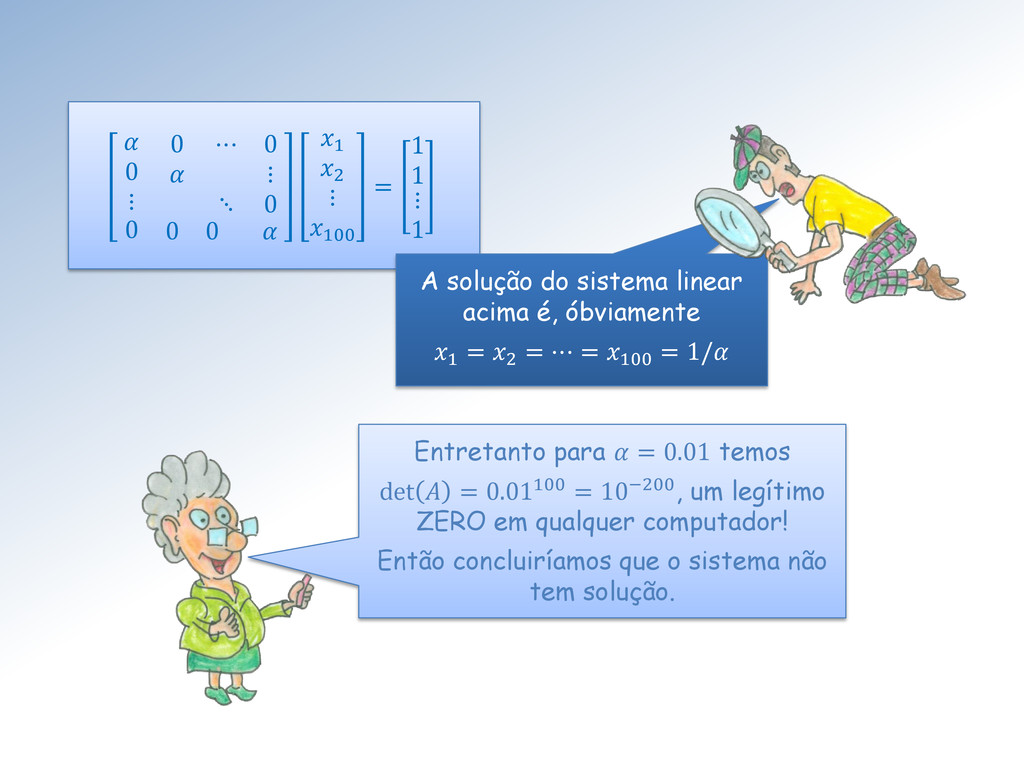
um legítimo ZERO em qualquer computador! Então concluiríamos que o sistema não tem solução. 0 ⋮ 0 ⋯ 0 ⋮ ⋱ 0 0 0 0 1 2 ⋮ 100 = 1 1 ⋮ 1 A solução do sistema linear acima é, óbviamente 1 = 2 = ⋯ = 100 = 1/
= 0 para − > . E possui banda superior k, quando = 0 para − > . = × × 0 0 0 × × × 0 0 × 0 0 × × 0 × × 0 × × × × × × Eis uma matriz A com banda inferior 2 (em laranja) e banda superior 1 (em verde):
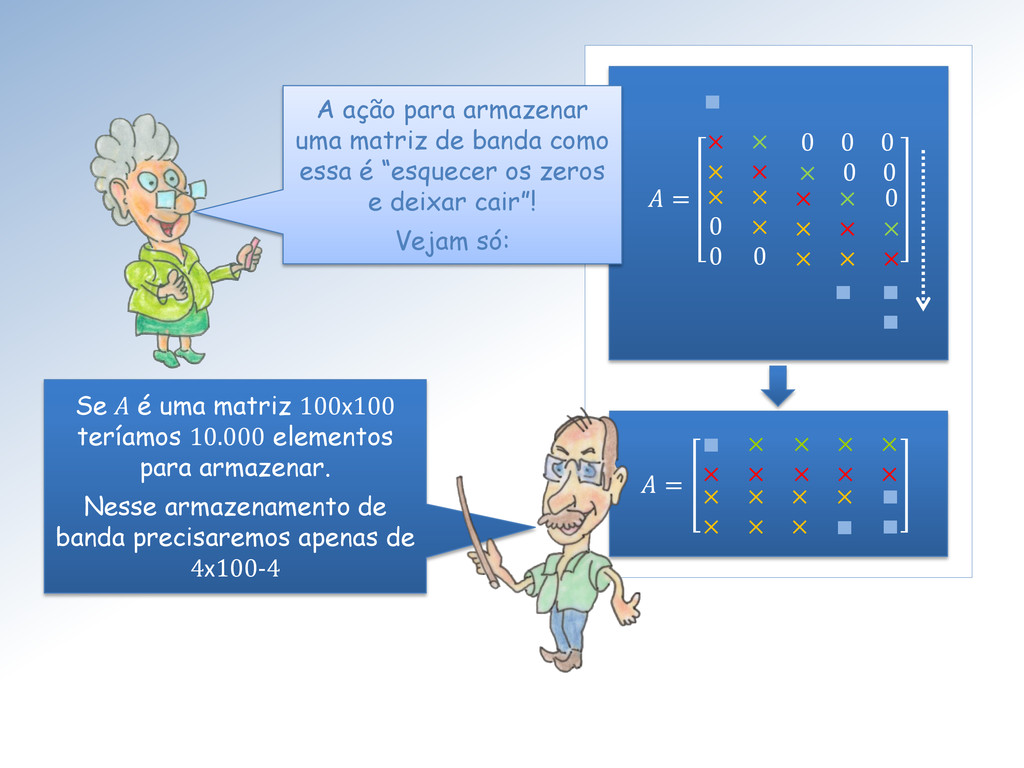
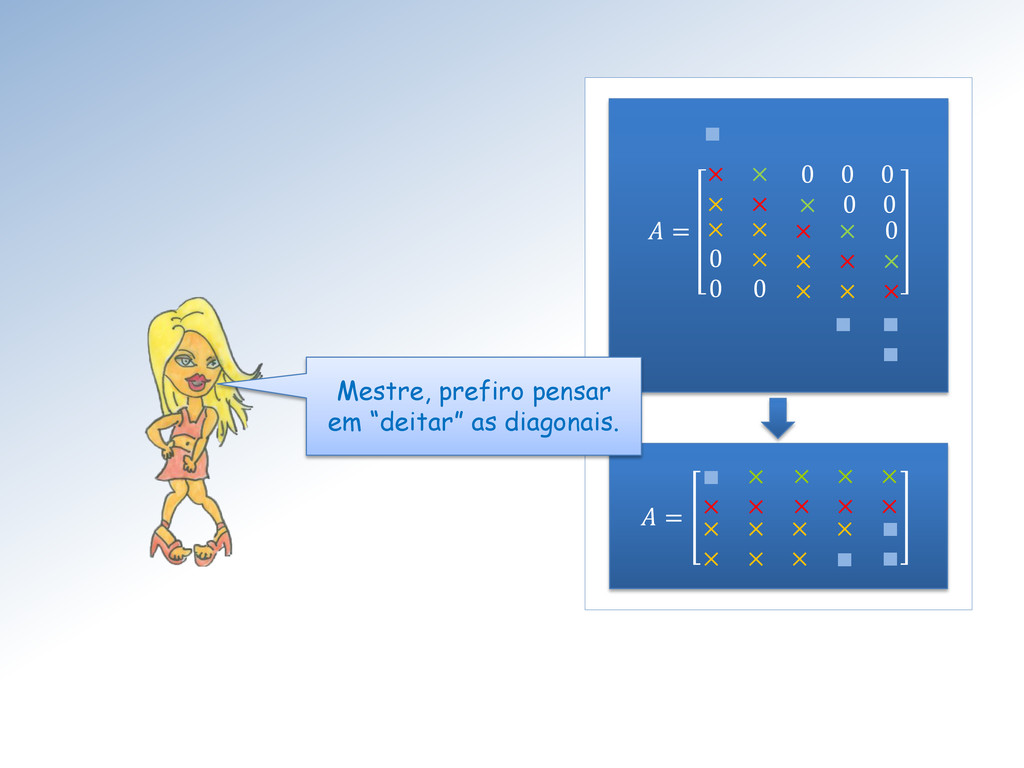
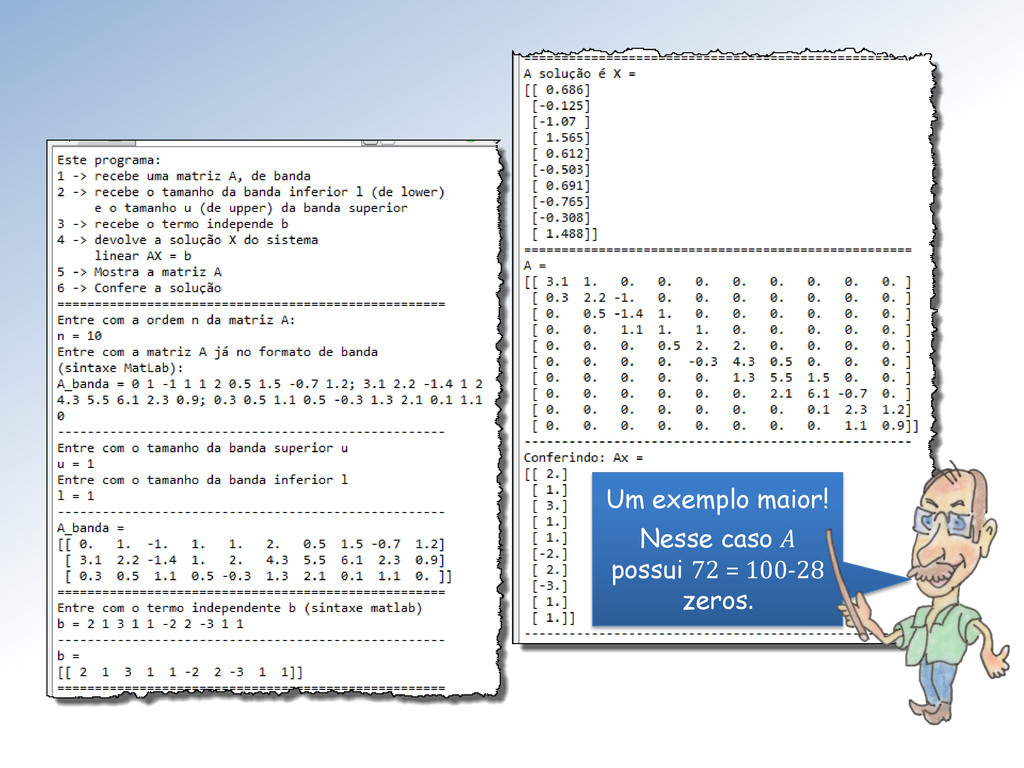
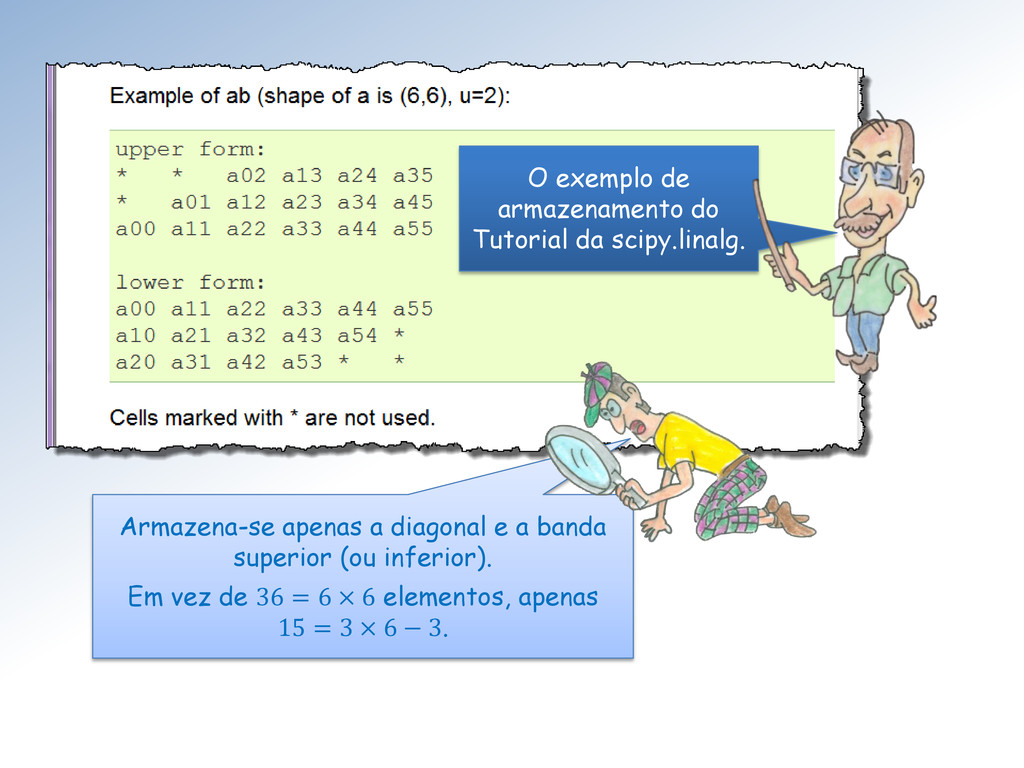
0 × 0 0 × × 0 × × 0 × × × × × × = ∎ × × × × × × × × × × × × × × × × ∎ ∎ ∎ Se A é uma matriz 100x100 teríamos 10.000 elementos para armazenar. Nesse armazenamento de banda precisaremos apenas de 4x100-4 ∎ ∎ ∎ ∎ A ação para armazenar uma matriz de banda como essa é “esquecer os zeros e deixar cair”! Vejam só:
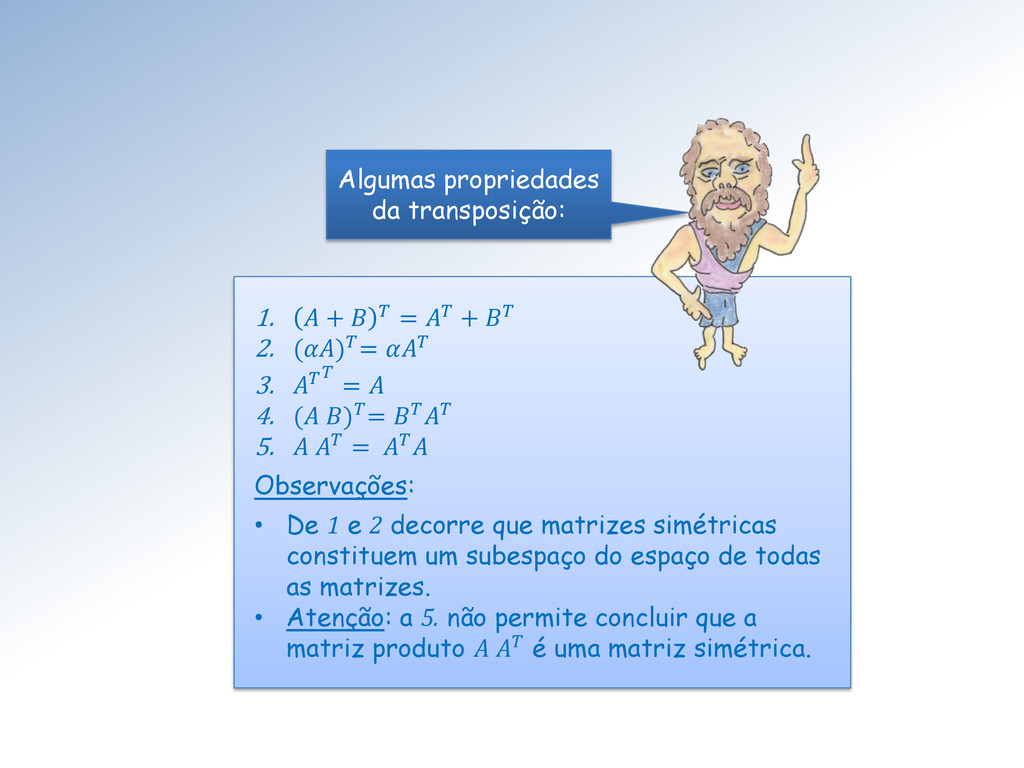
)= 5. = Observações: • De 1 e 2 decorre que matrizes simétricas constituem um subespaço do espaço de todas as matrizes. • Atenção: a 5. não permite concluir que a matriz produto é uma matriz simétrica. Algumas propriedades da transposição:
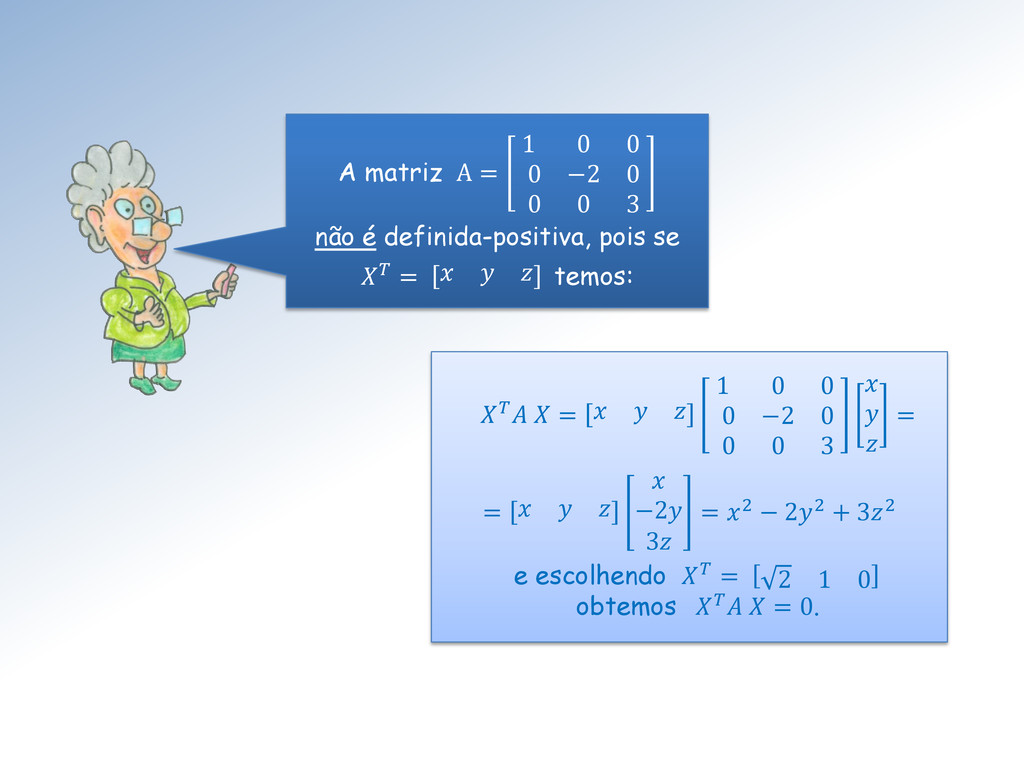
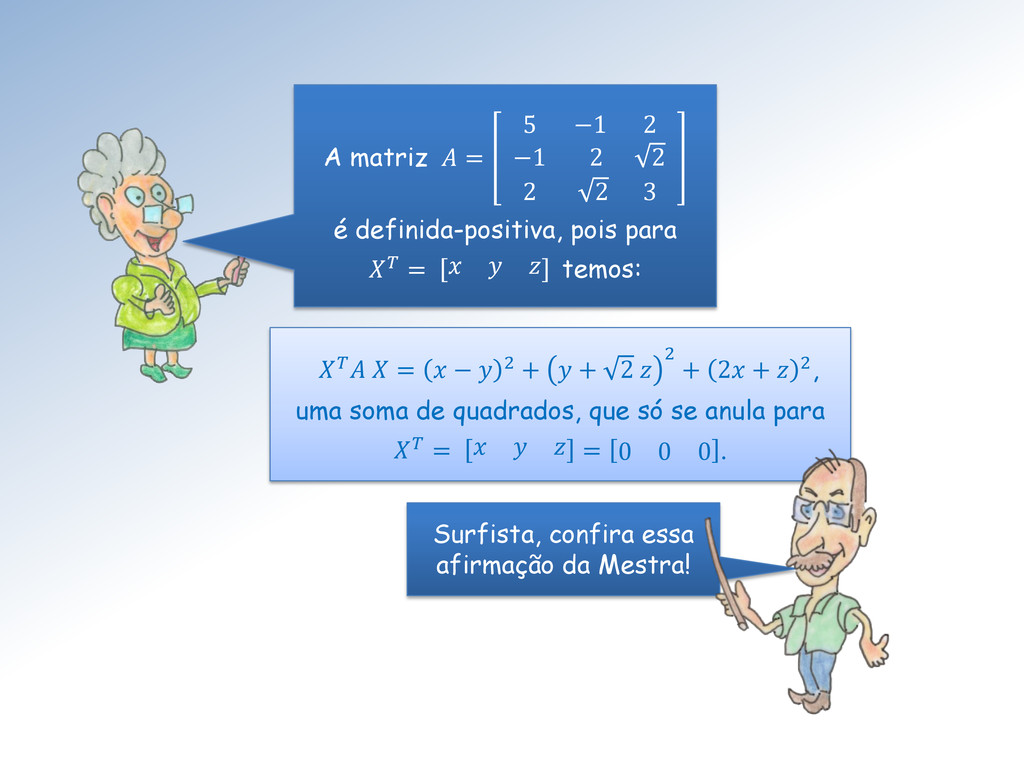
2 3 é definida-positiva, pois para = temos: = − 2 + + 2 2 + 2 + 2, uma soma de quadrados, que só se anula para = = 0 0 0 . Surfista, confira essa afirmação da Mestra!
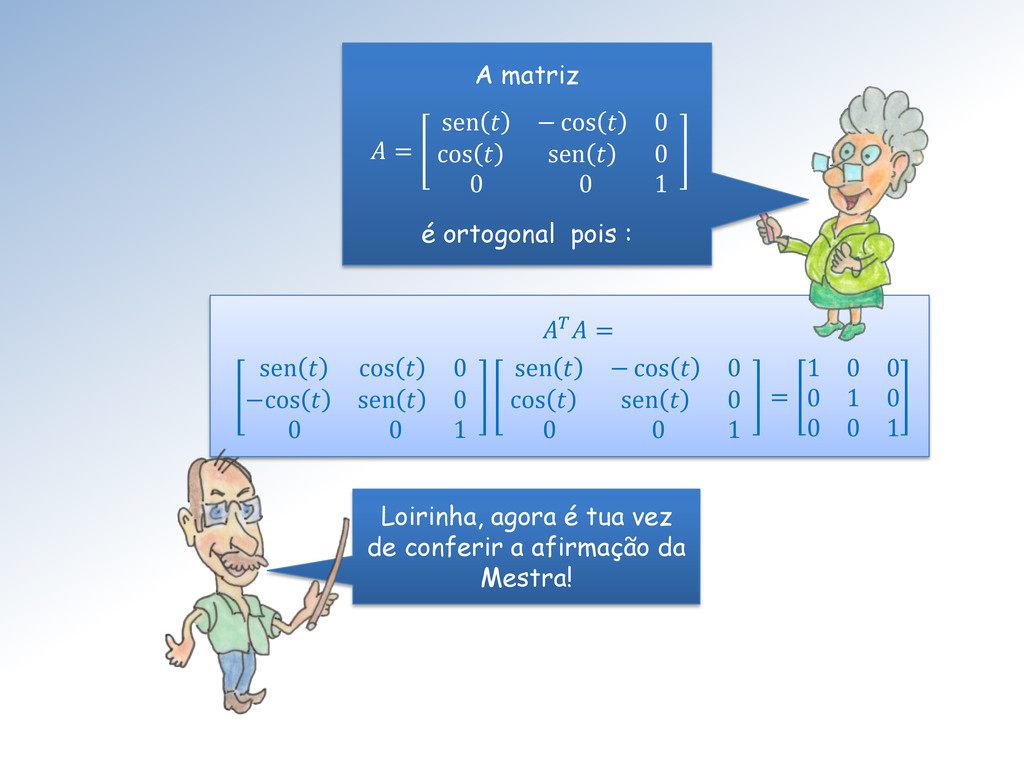
sen − cos 0 cos sen 0 0 0 1 = 1 0 0 0 1 0 0 0 1 Loirinha, agora é tua vez de conferir a afirmação da Mestra! A matriz = sen − cos 0 cos sen 0 0 0 1 é ortogonal pois :
anotada AH, é definida por = [ ]. É a conjugada da transposta. Adjunta Quando satisfaz: = . É a correspondente de uma matriz simétrica, com elementos complexos, Hermitiana, ou auto-adjunta Quando sua adjunta é a inversa: = −1 ⟺ = = Unitária
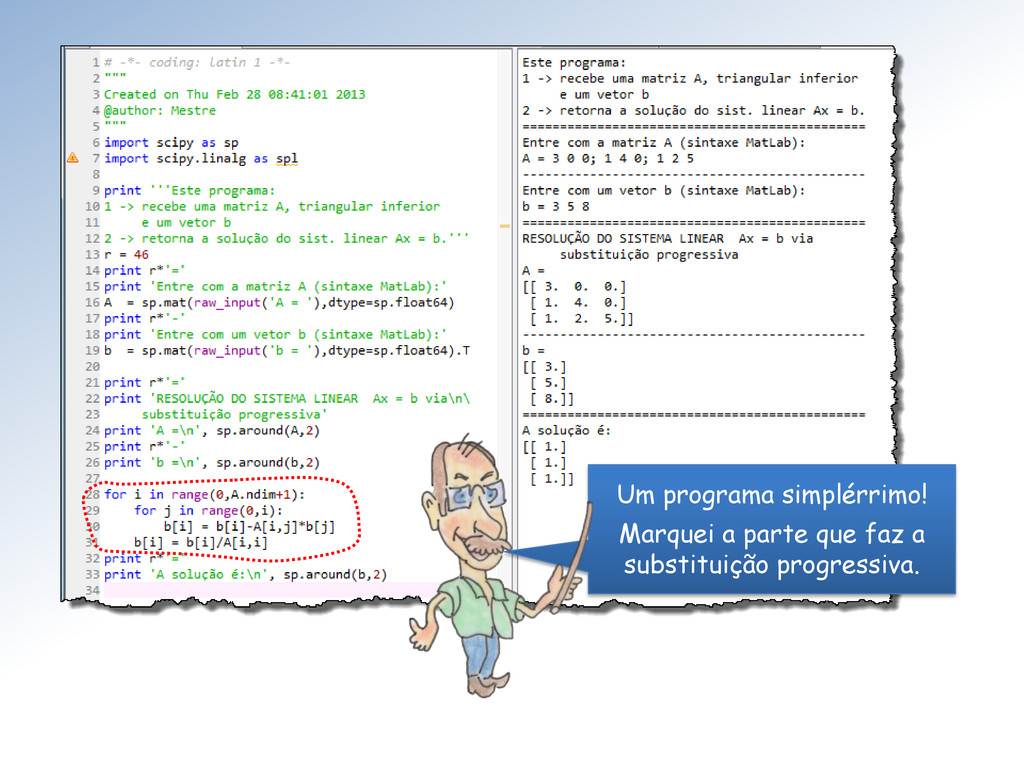
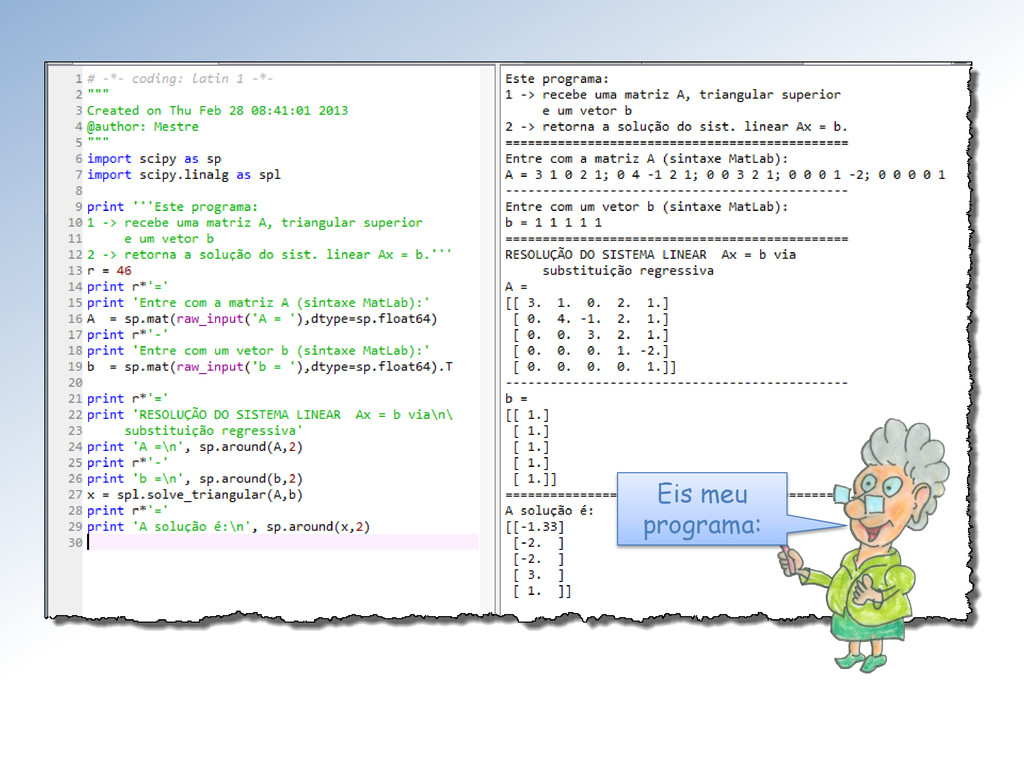
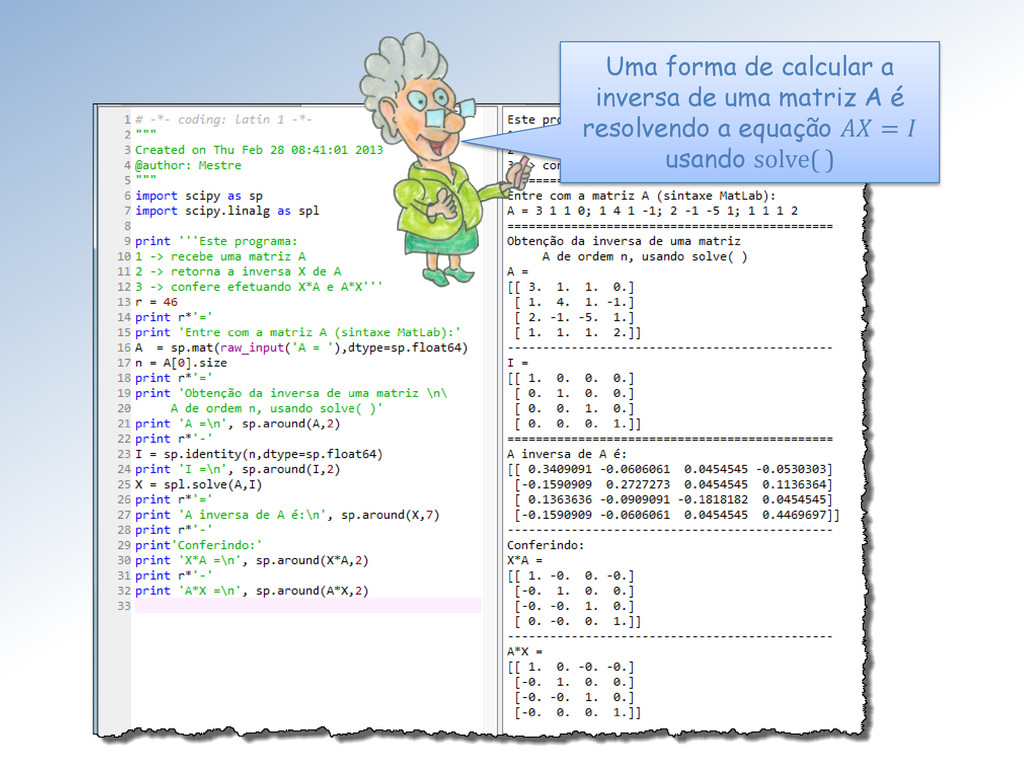
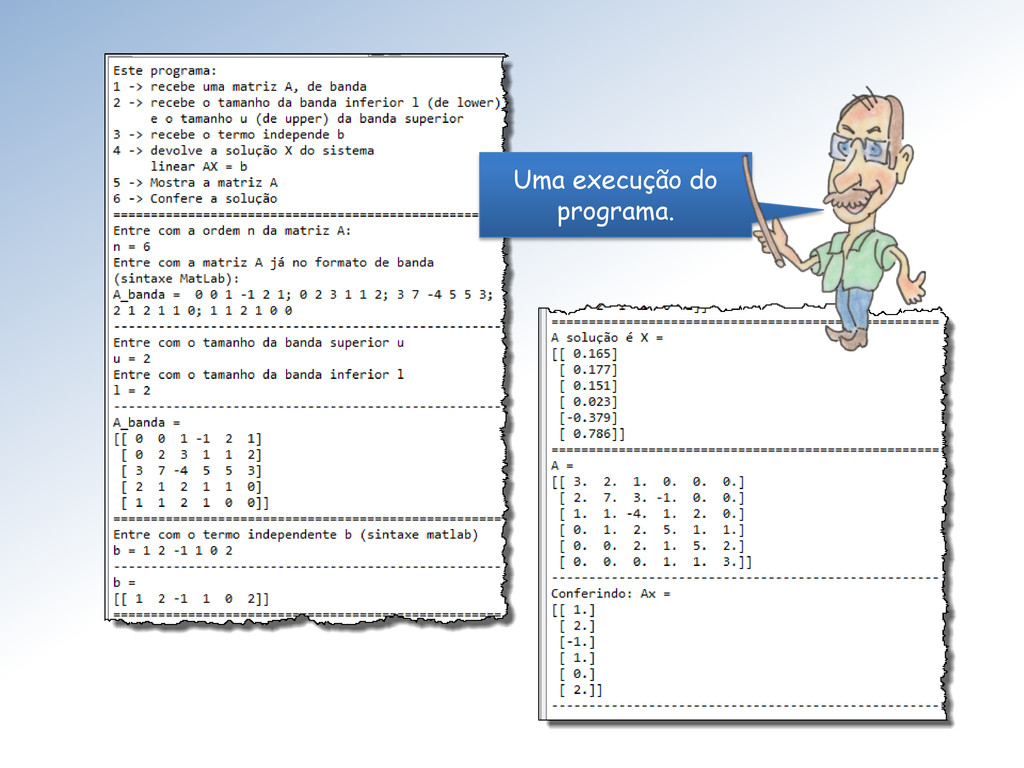
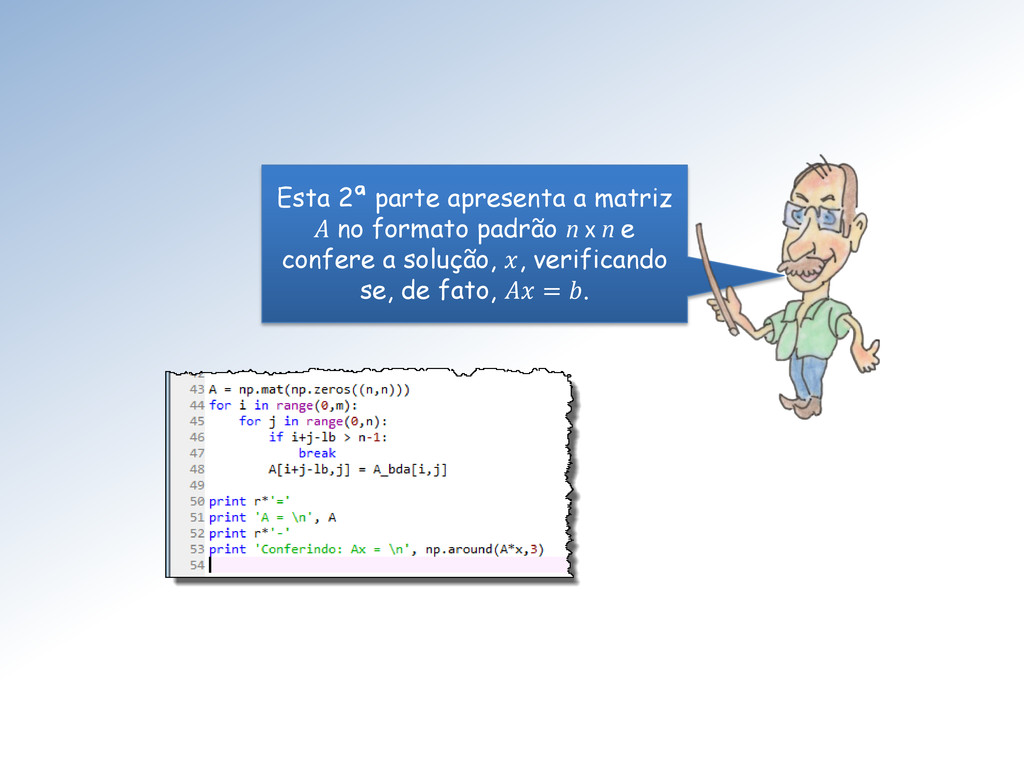
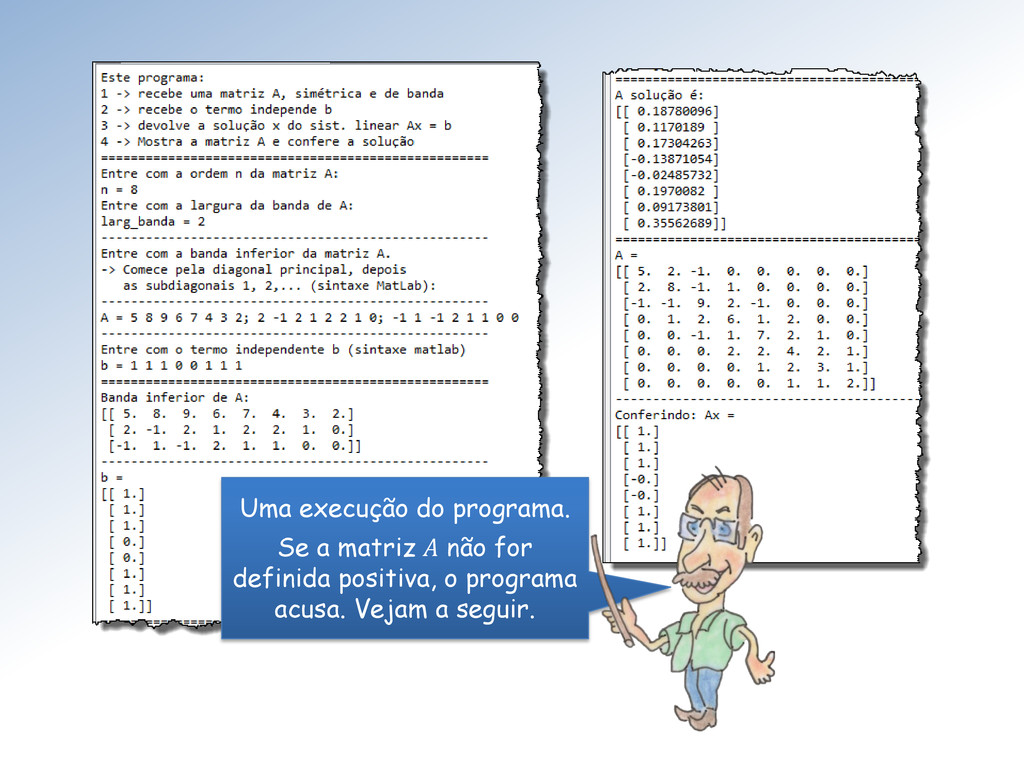
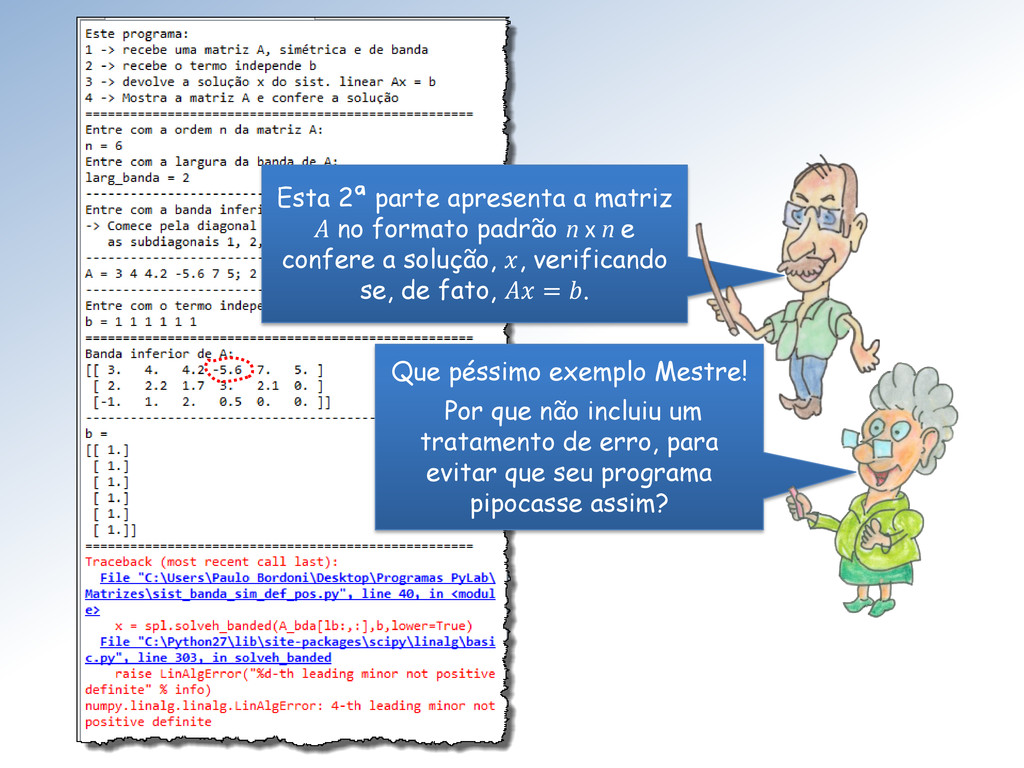
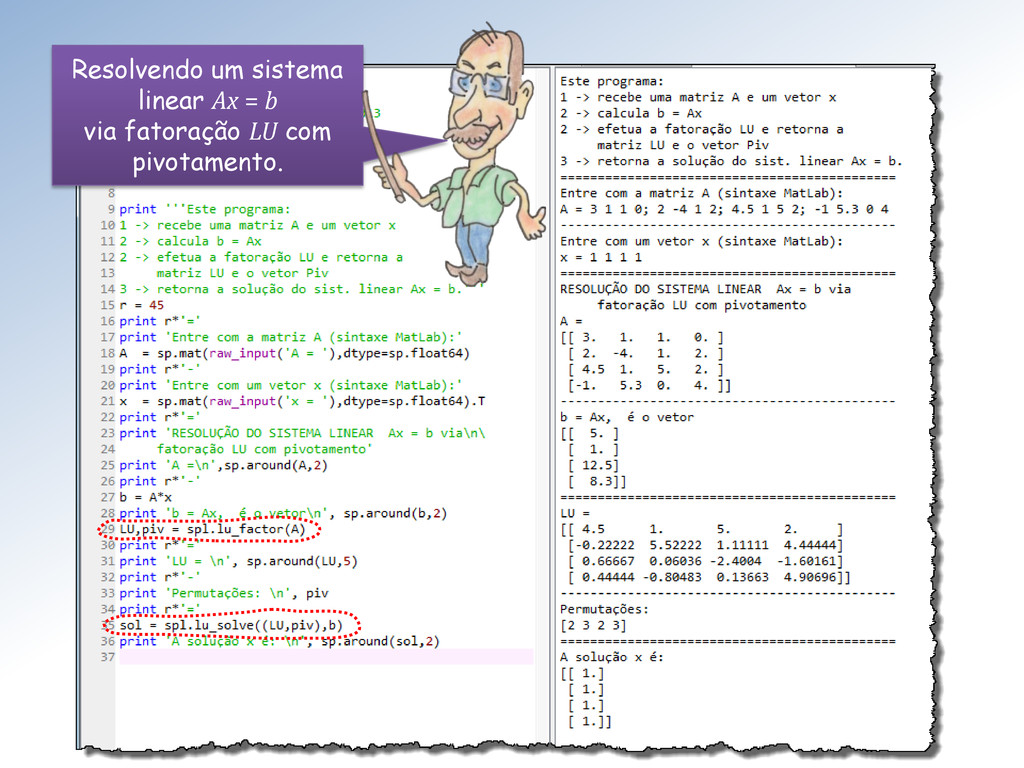
de erro, para evitar que seu programa pipocasse assim? Esta 2ª parte apresenta a matriz A no formato padrão n x n e confere a solução, , verificando se, de fato, = .
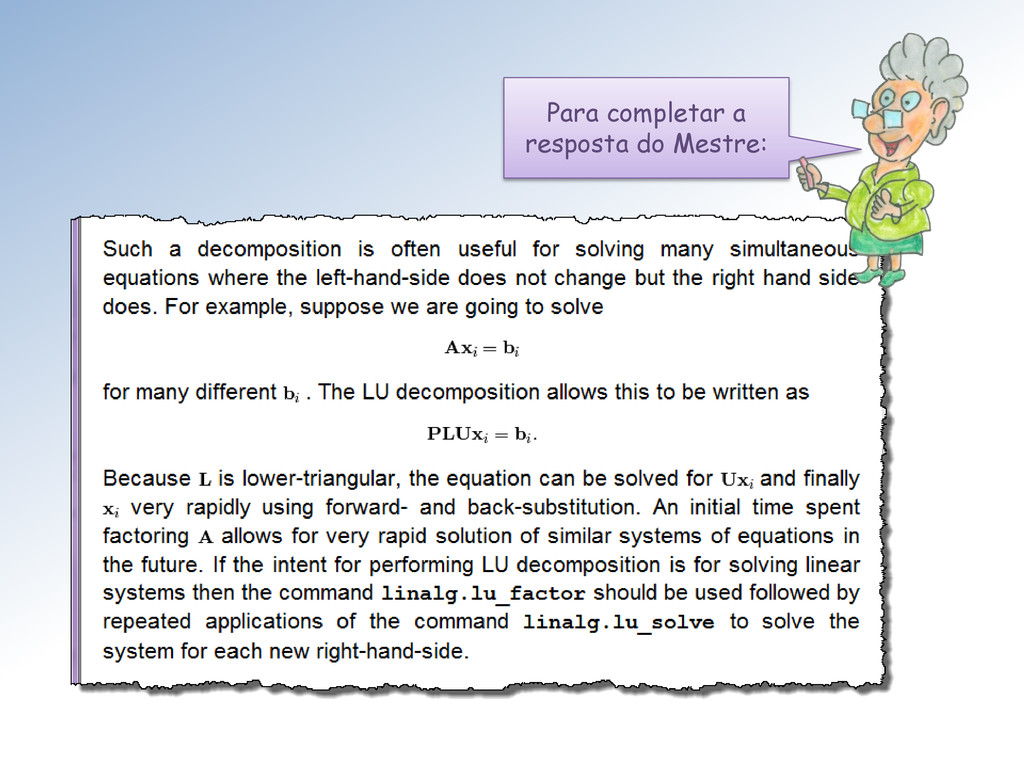
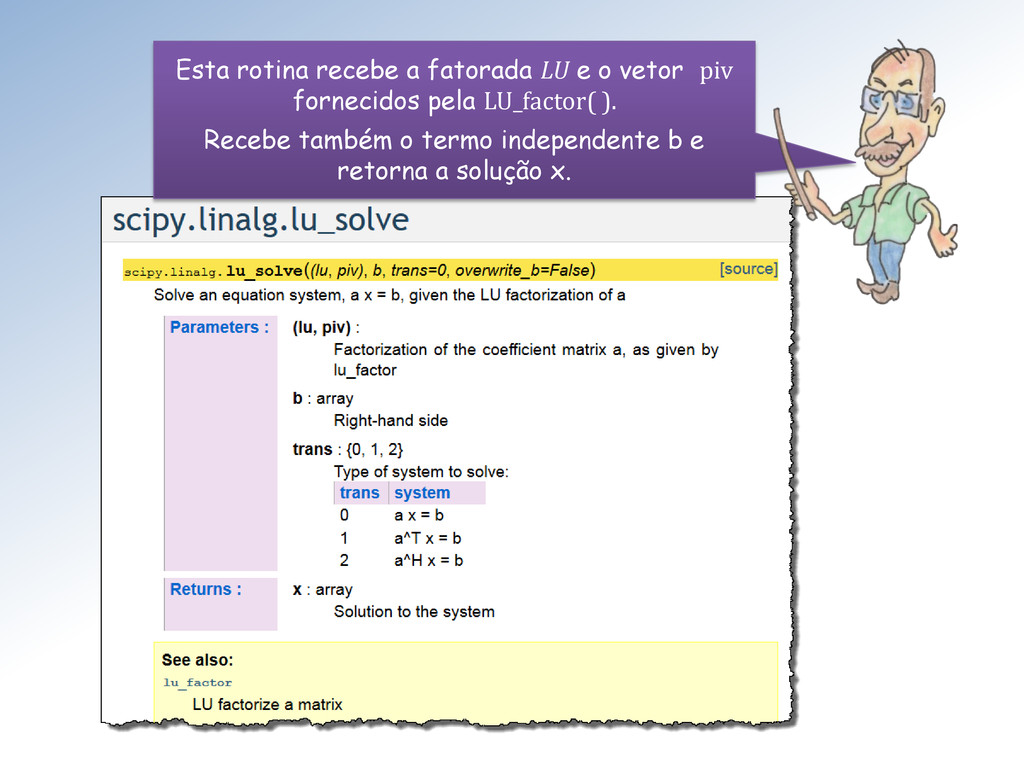
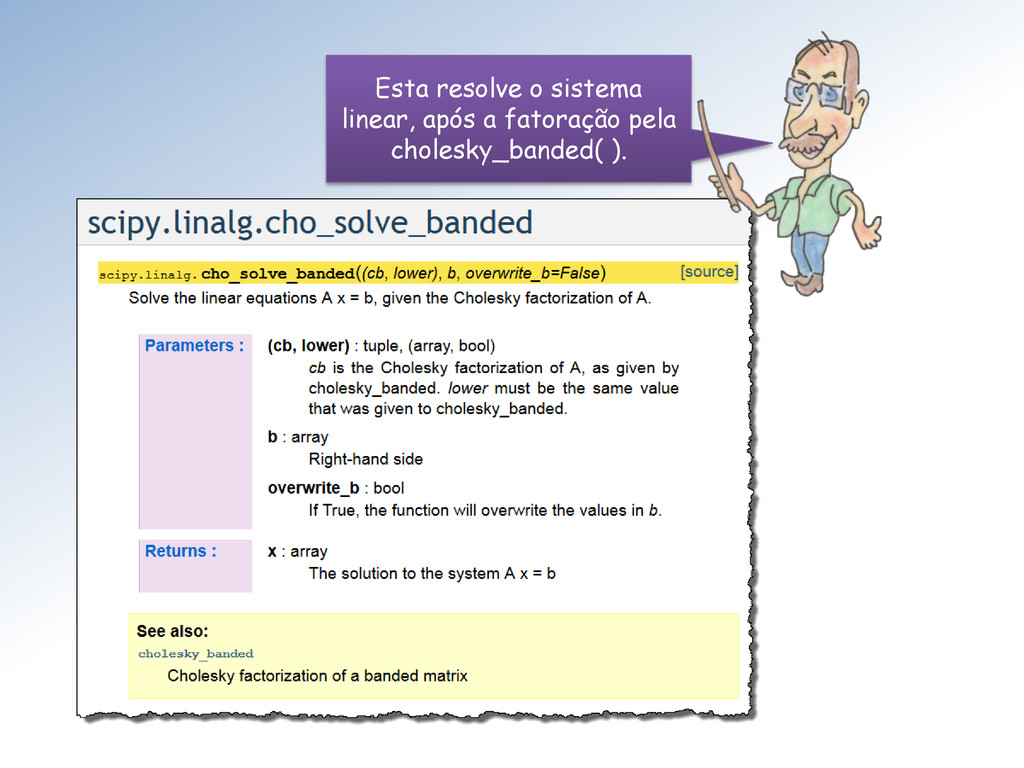
o sistema linear = é equivalente a resolver = . Então resolvemos primeiro o sistema = e depois o = . Note que esses dois são sistemas triangulares, facílimos de resolver! Conforme veremos depois, o maior trabalho reside em achar a fatoração.
veja na próxima transparência! Confirmando, se A é simétrica e positiva definida está garantida a existência de uma matriz triangular superior tal que = . É como se U fosse a raiz quadrada de A, Mestre!
0 ⟹ > 0. De fato assumindo ≠ 0 e = teremos ≠ 0, devido à não-singularidade de U. Então = () = = = 2 > 0. Bem, minha querida, de = segue que: • A é simétrica, pois = ()= ()= = • U é não-singular, pois det ()2 = det() = det () ≠ 0.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Aliás existe toda uma fauna de matrizes = [ ]](https://files.speakerdeck.com/presentations/b4c64570137901318e8126b064201532/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Uma matriz = [ ] possui banda inferior k quando](https://files.speakerdeck.com/presentations/b4c64570137901318e8126b064201532/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Um zoológico bem complexo: A adjunta de = [ ],](https://files.speakerdeck.com/presentations/b4c64570137901318e8126b064201532/slide_52.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}