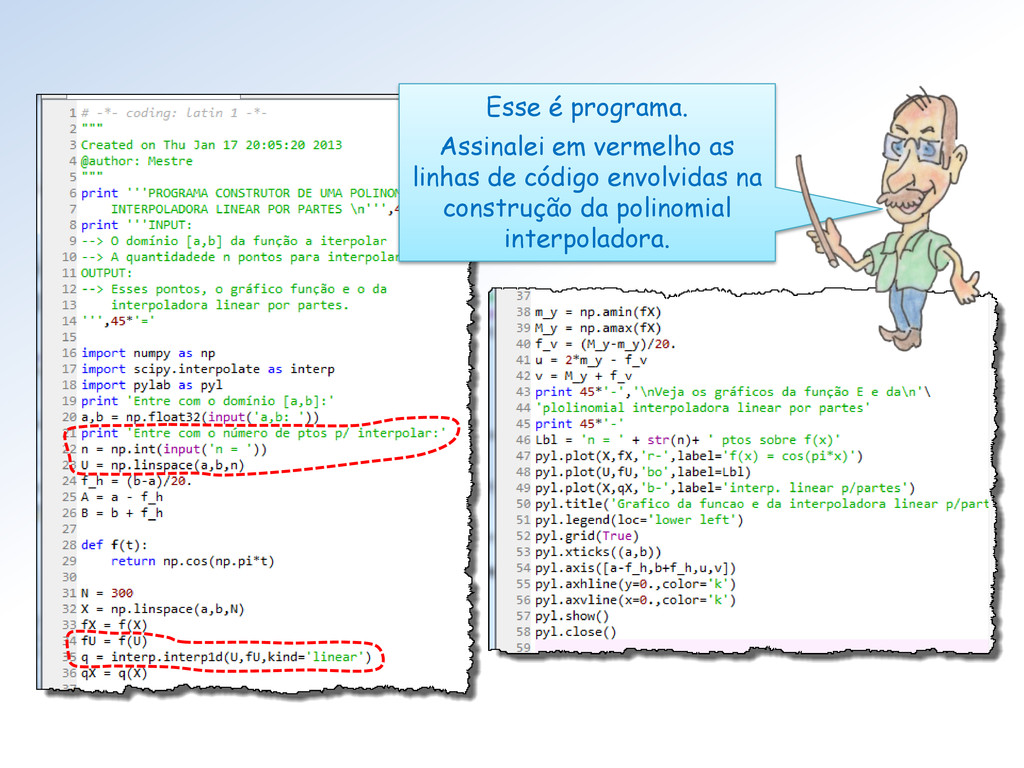
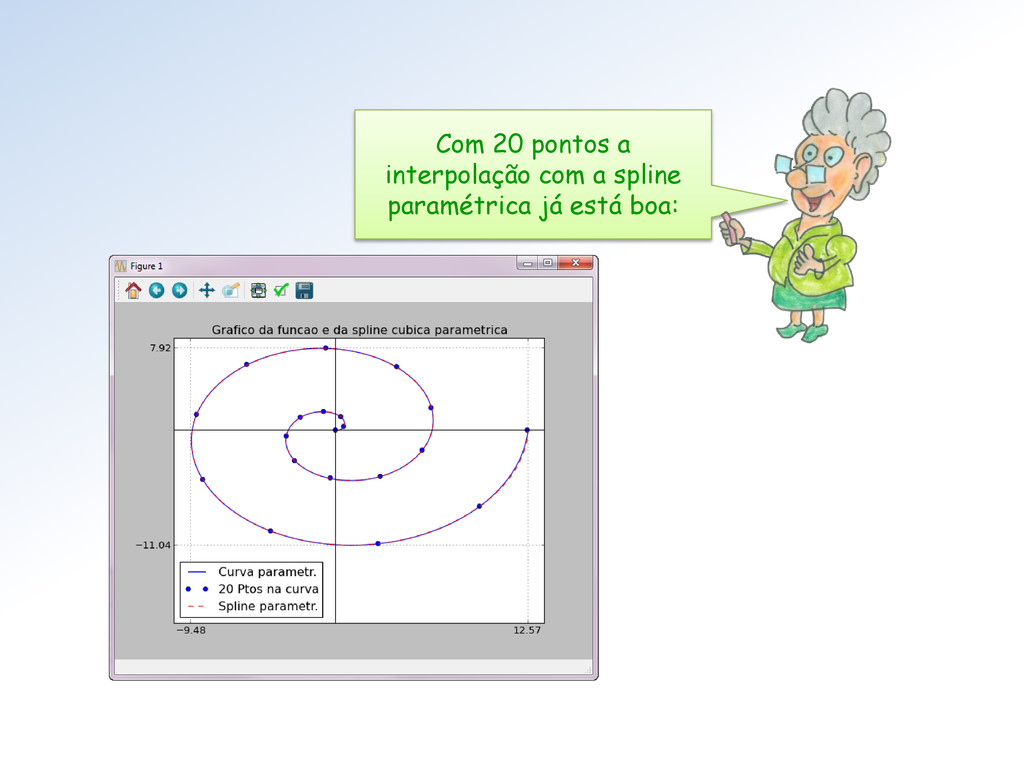
vários subintervalos. Depois, no lugar de uma polinomial de grau alto, no intervalo grande, usamos uma polinomial de grau baixo em cada subintervalo. Saboreiem a conquista na próxima transparência!
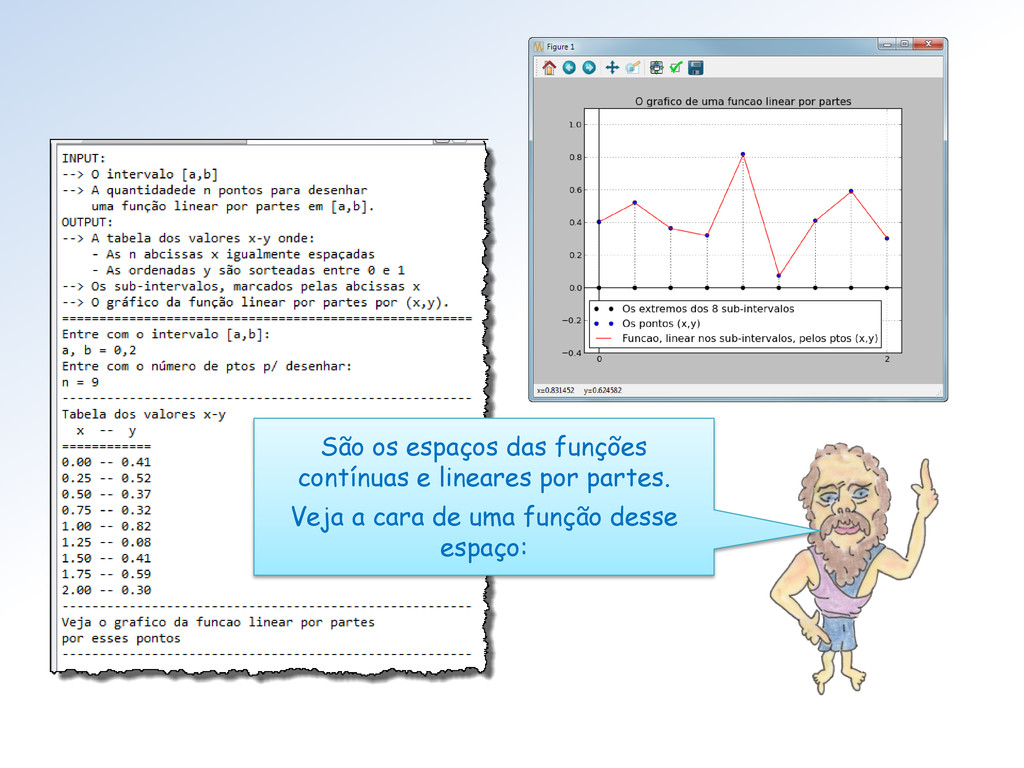
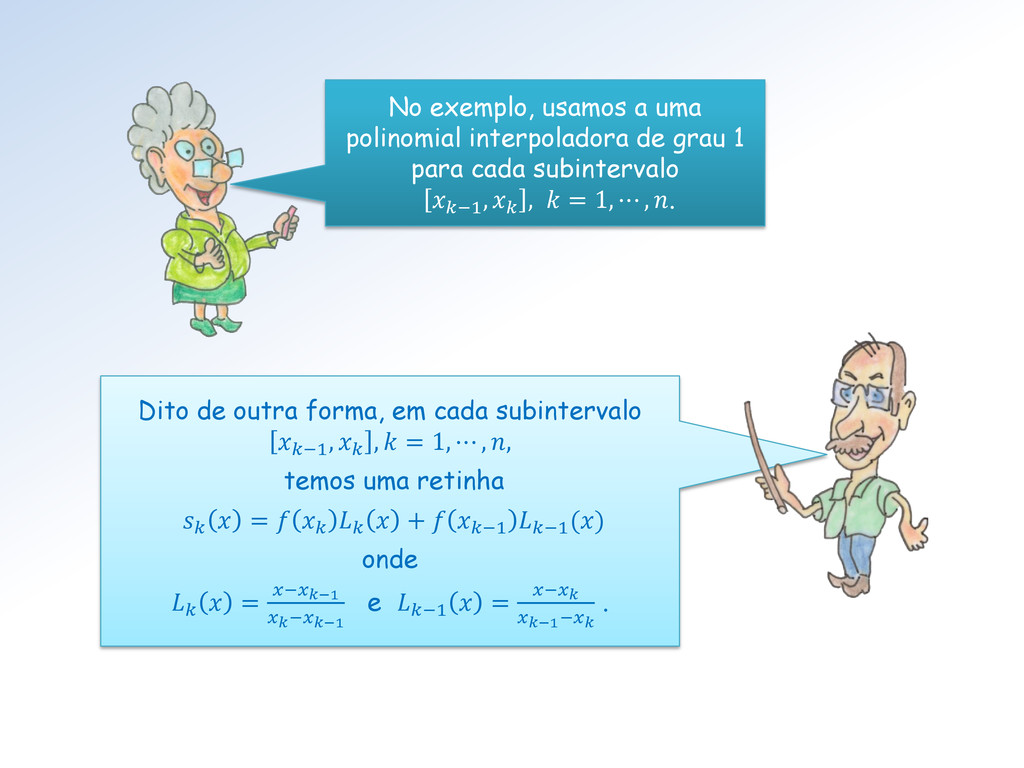
para cada subintervalo −1 , , = 1, ⋯ , . Dito de outra forma, em cada subintervalo −1 , , = 1, ⋯ , , temos uma retinha = + −1 −1 () onde = −−1 −−1 e −1 = − −1− .
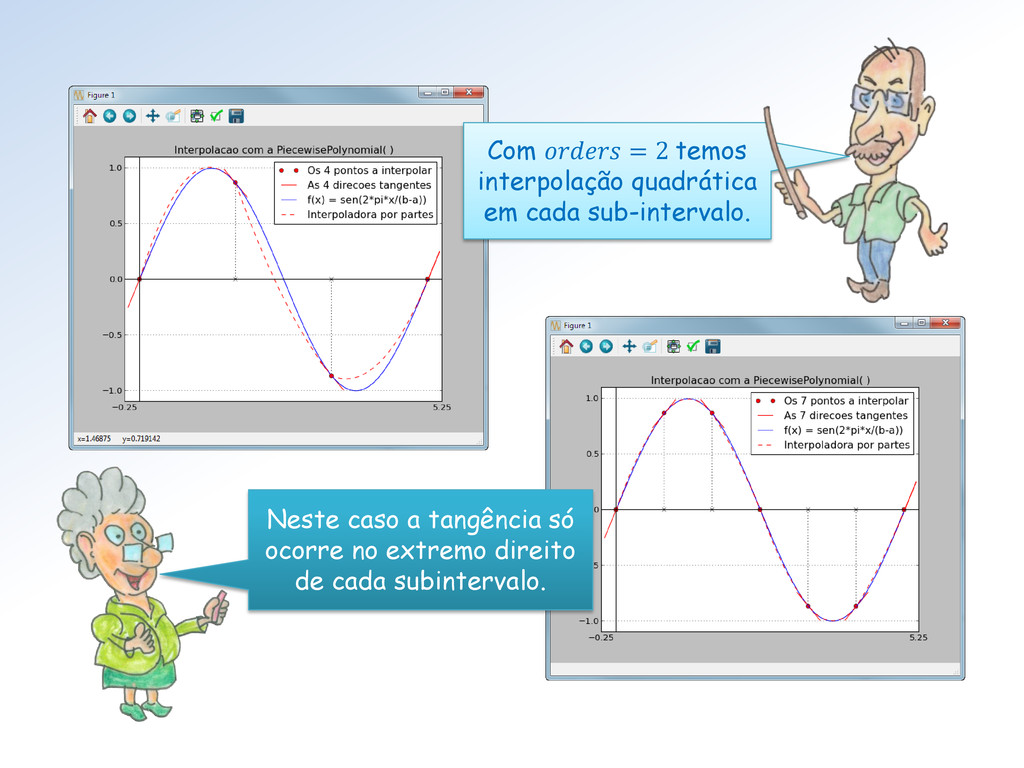
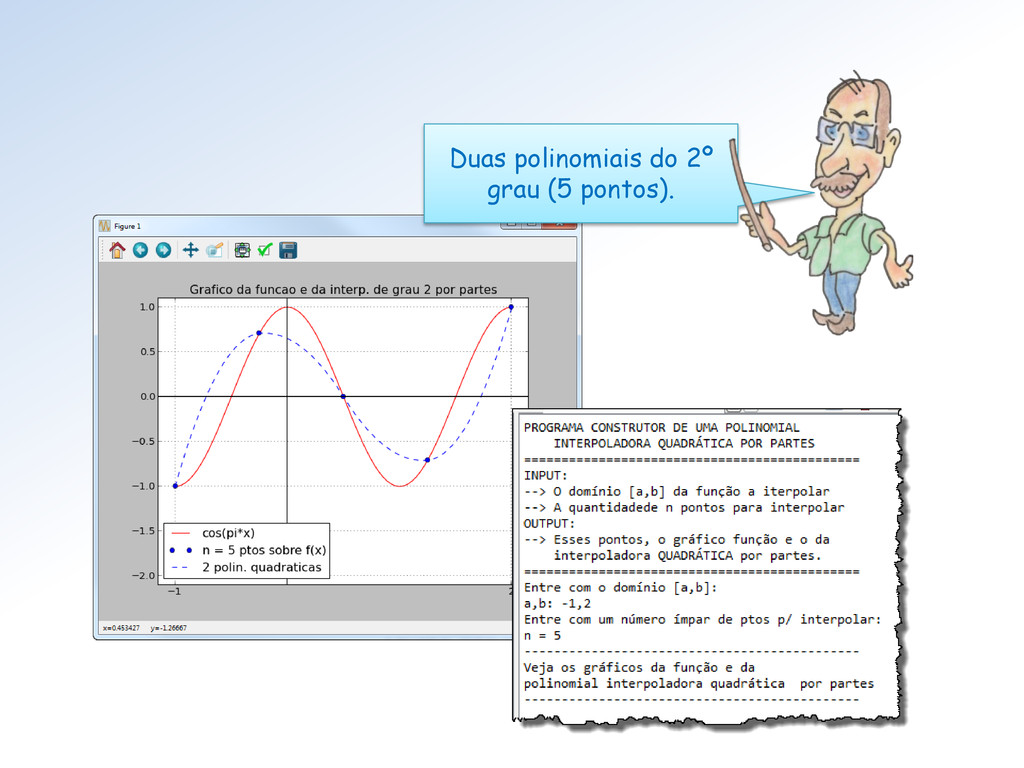
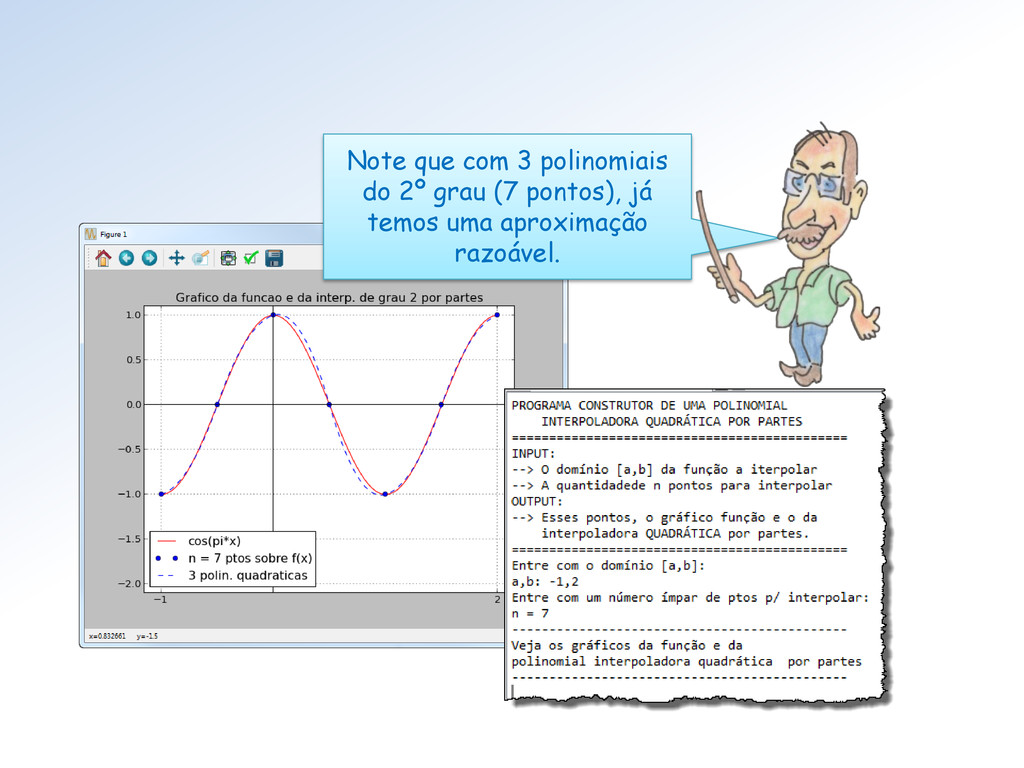
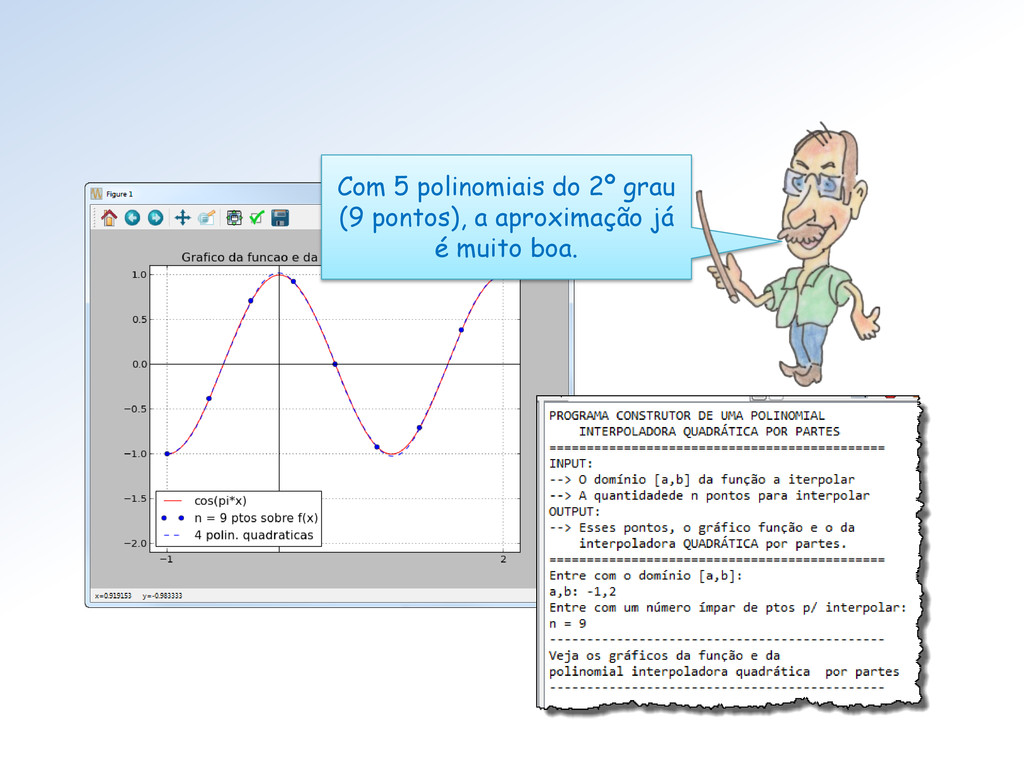
+1 ], usamos a uma polinomial interpoladora de grau 2. Em particular, o número total de pontos deverá ser ímpar. Outra possibilidade é efetuar interpolação quadrática por partes.
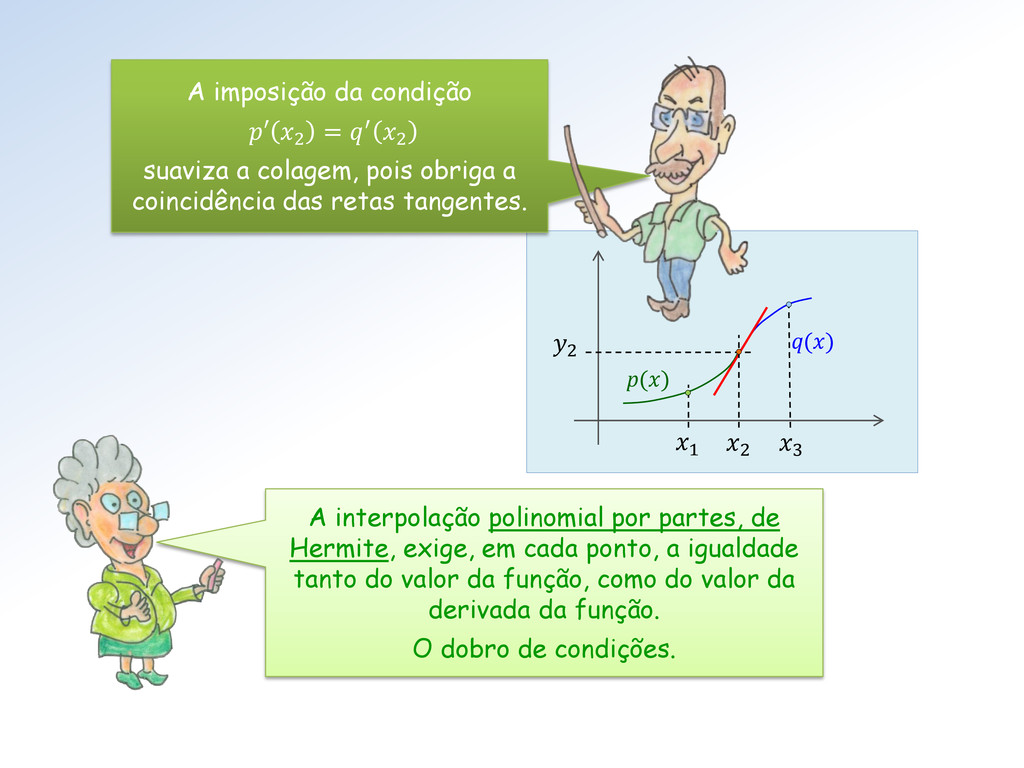
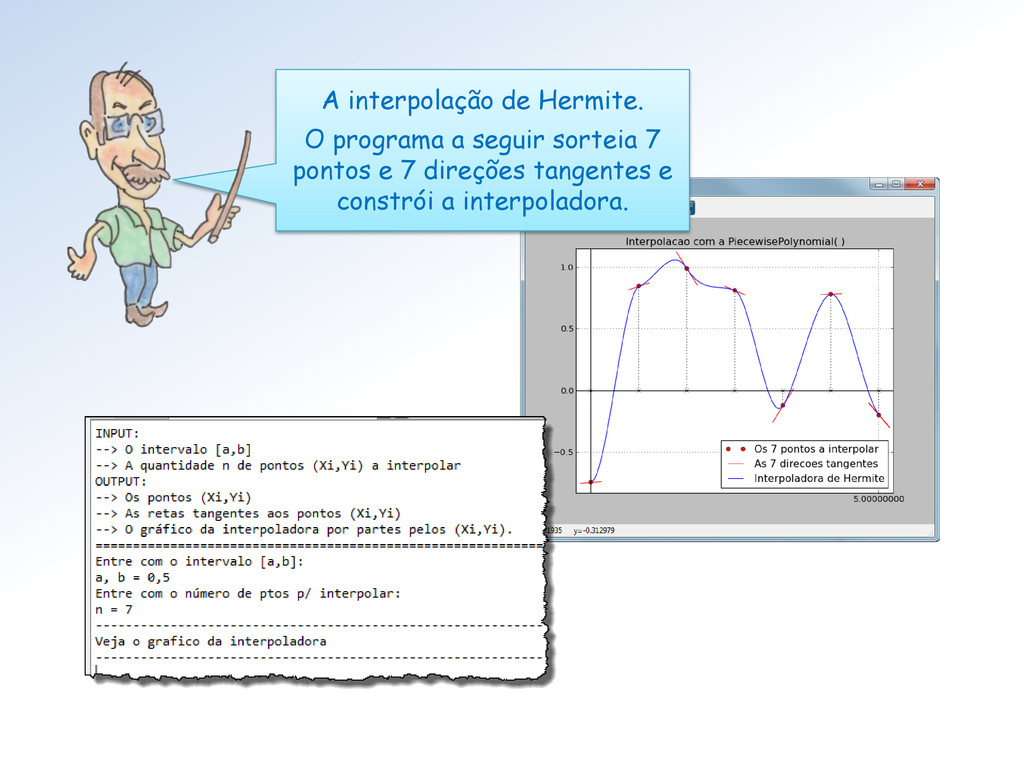
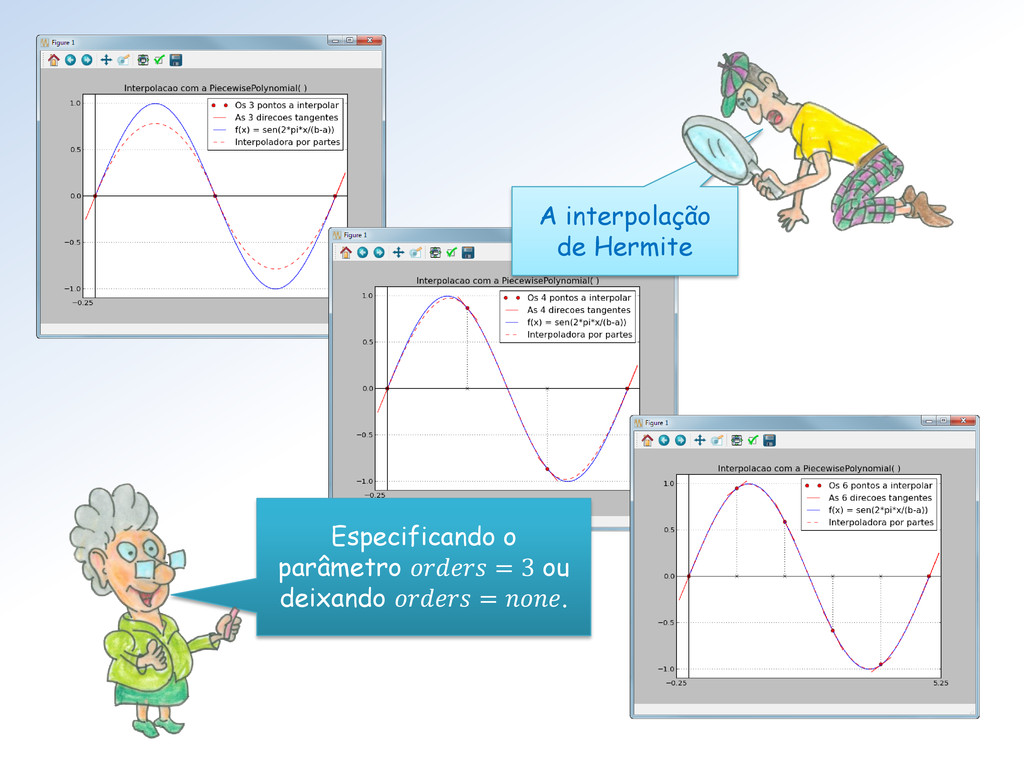
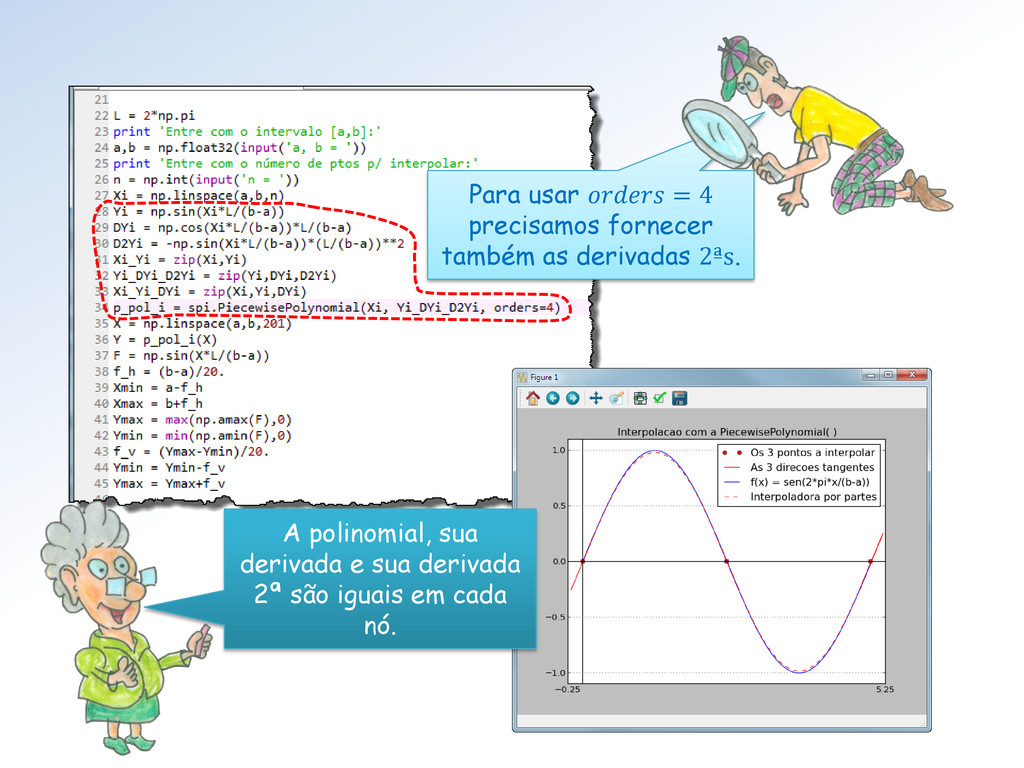
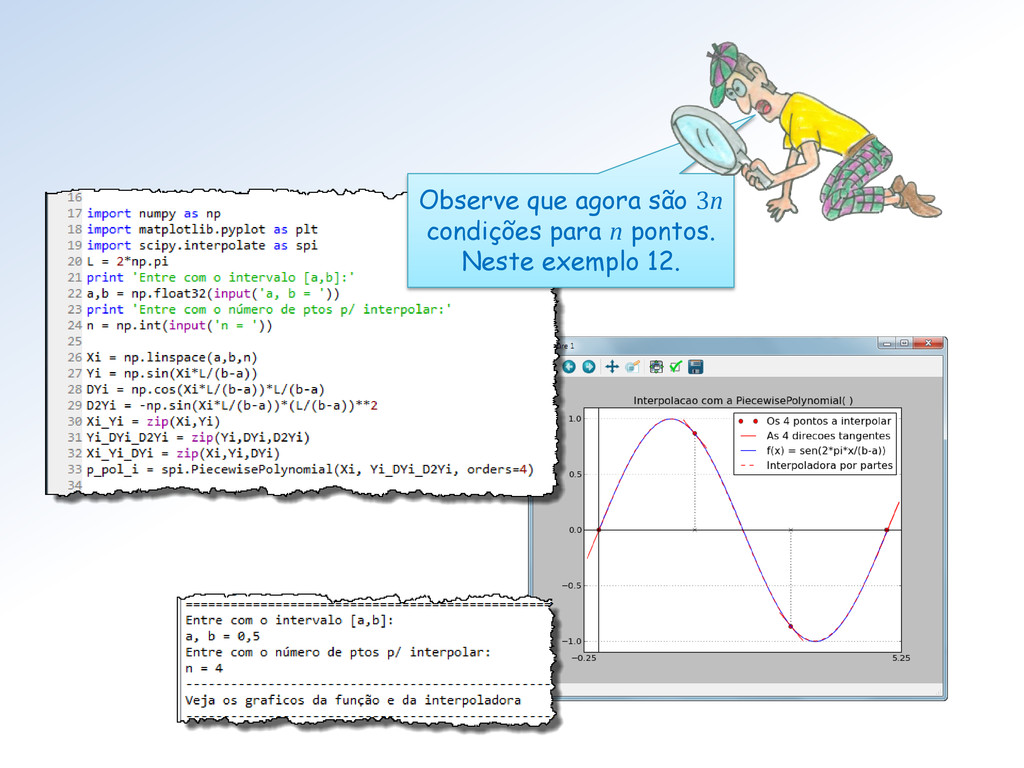
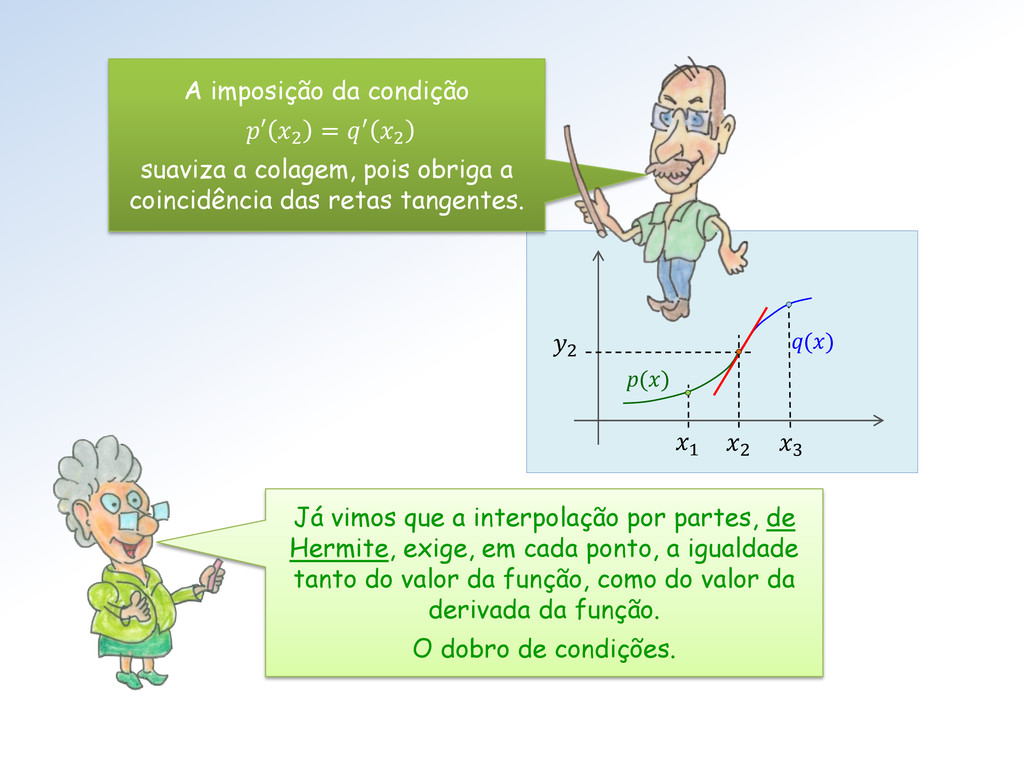
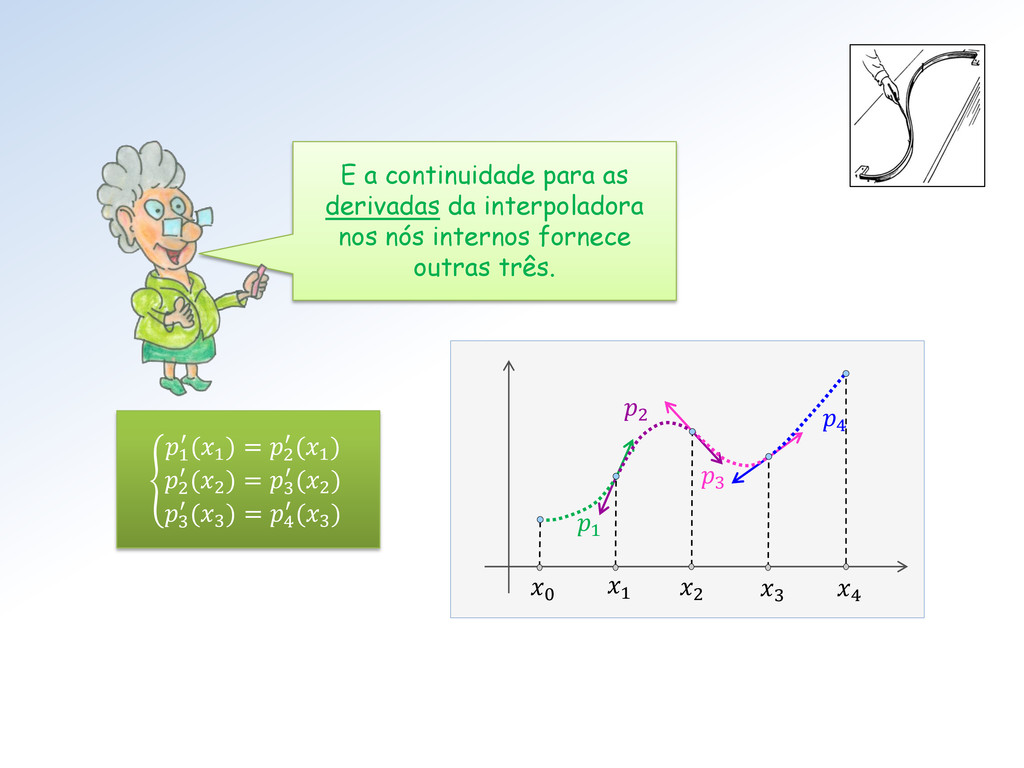
′ 2 = ′ 2 suaviza a colagem, pois obriga a coincidência das retas tangentes. A interpolação polinomial por partes, de Hermite, exige, em cada ponto, a igualdade tanto do valor da função, como do valor da derivada da função. O dobro de condições.
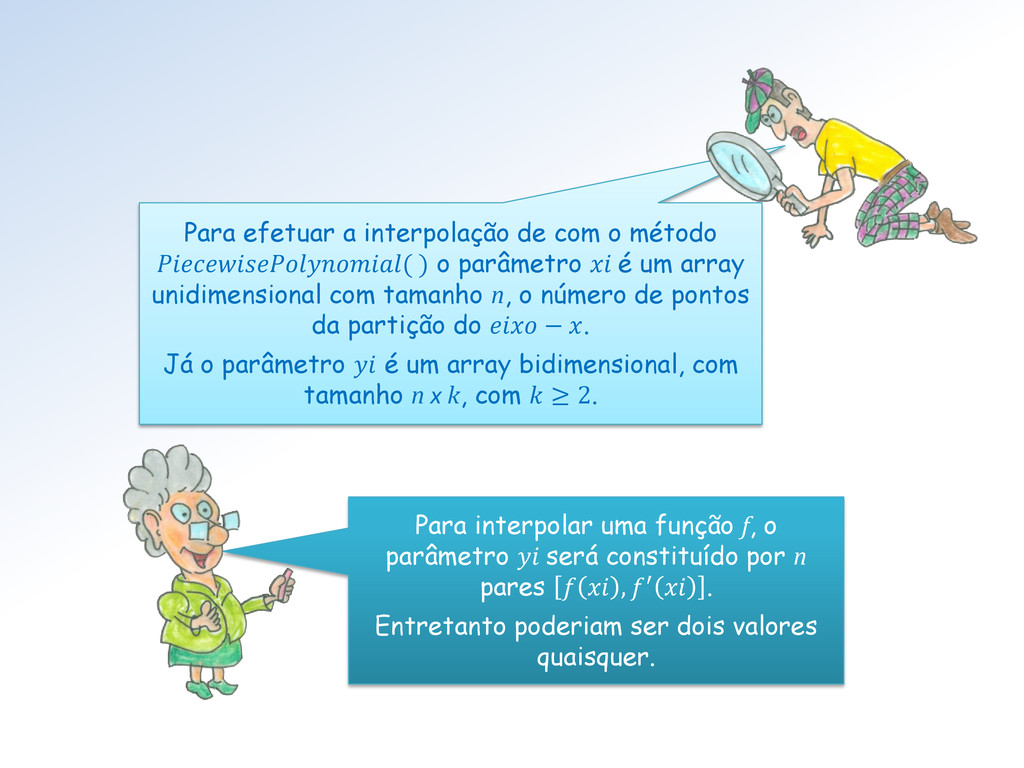
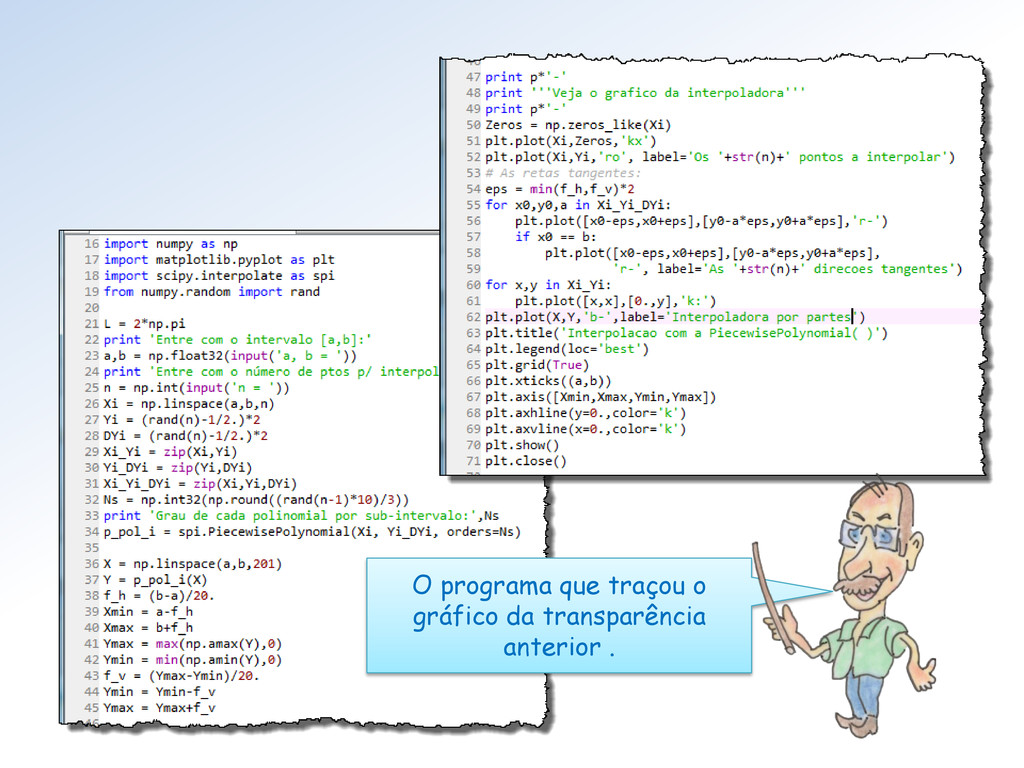
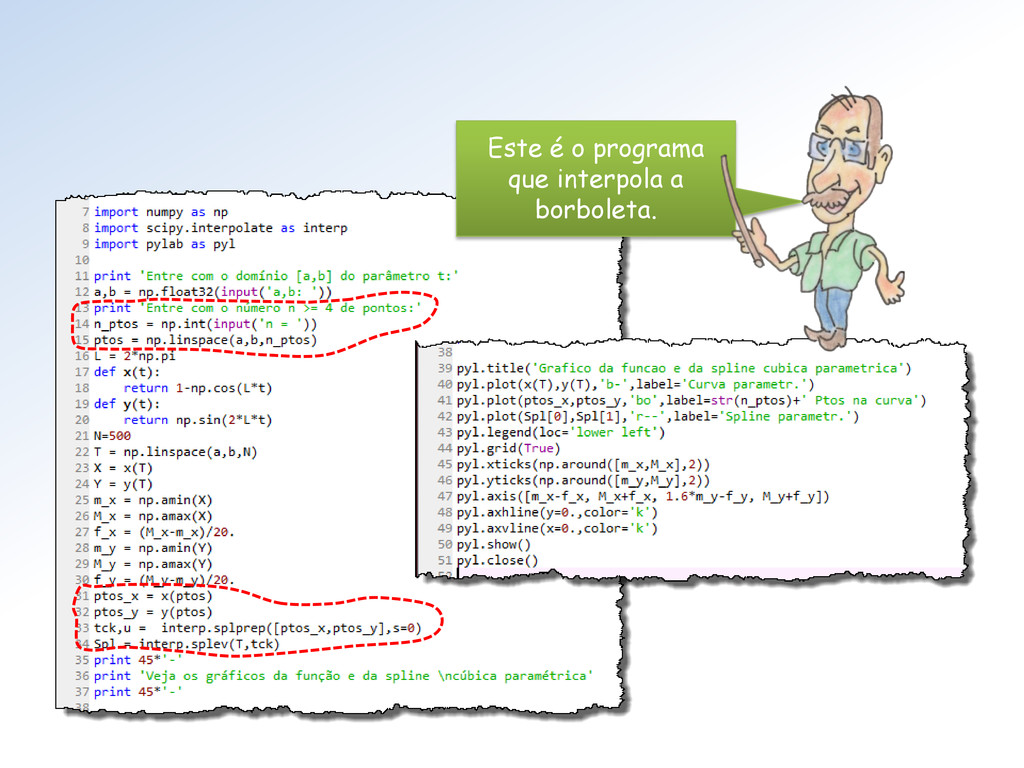
o parâmetro é um array unidimensional com tamanho n, o número de pontos da partição do − . Já o parâmetro é um array bidimensional, com tamanho n x k, com ≥ 2. Para interpolar uma função f, o parâmetro será constituído por n pares , ′ . Entretanto poderiam ser dois valores quaisquer.
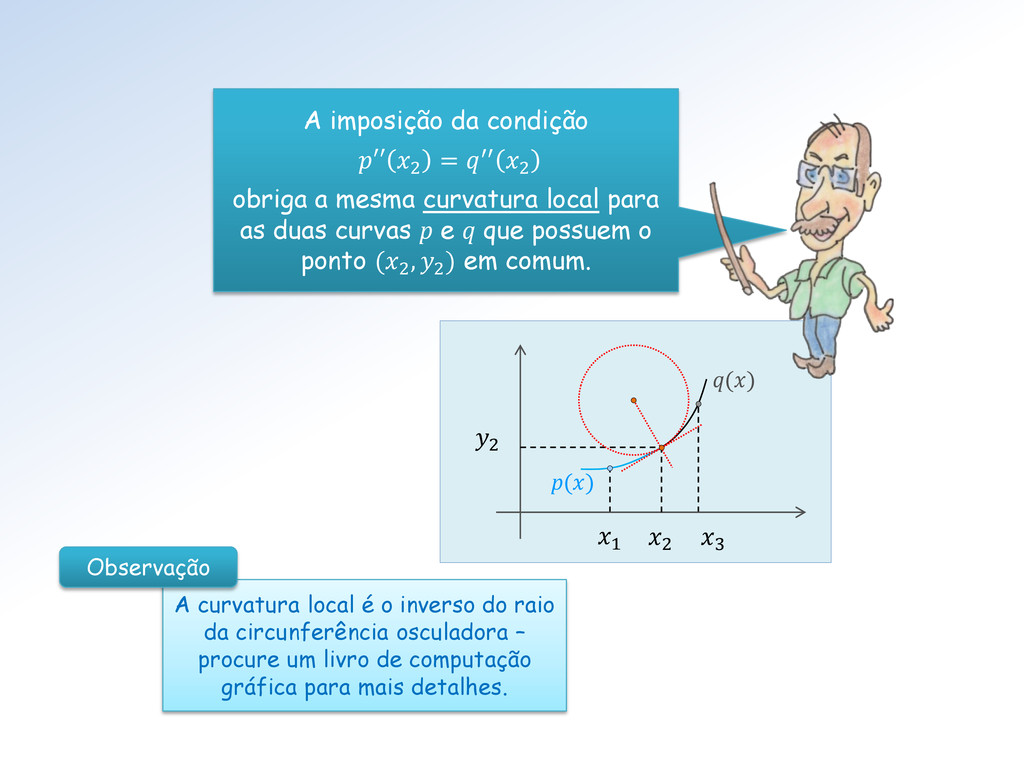
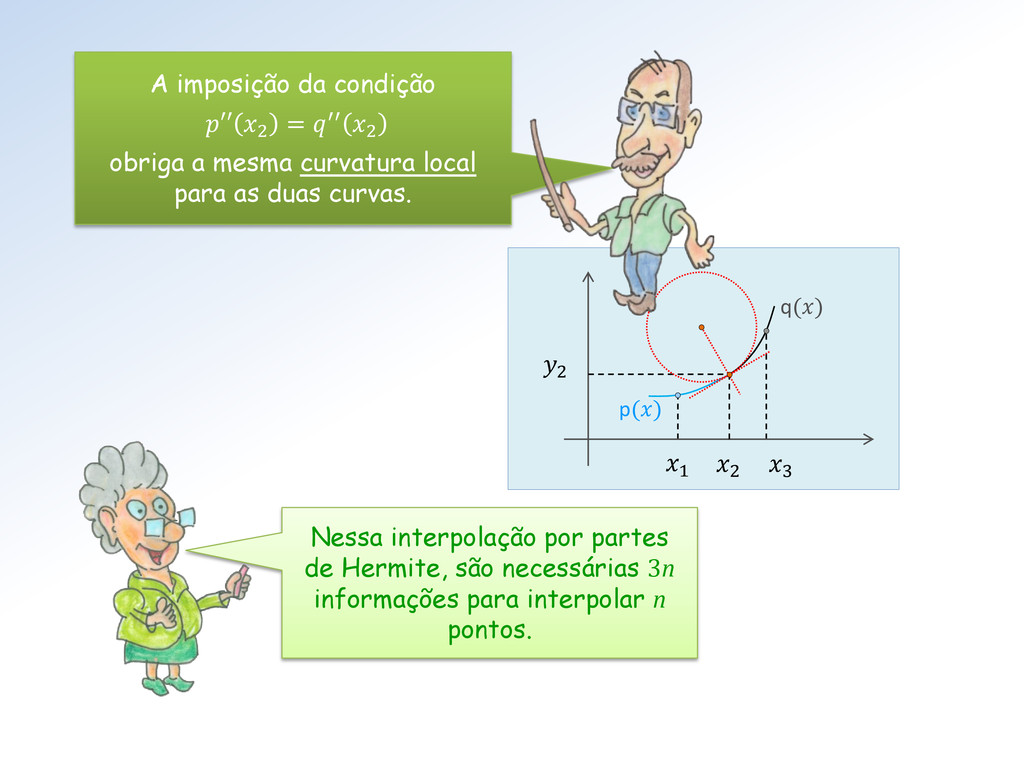
′′ 2 = ′′ 2 obriga a mesma curvatura local para as duas curvas p e q que possuem o ponto (2 , 2 ) em comum. A curvatura local é o inverso do raio da circunferência osculadora – procure um livro de computação gráfica para mais detalhes. Observação
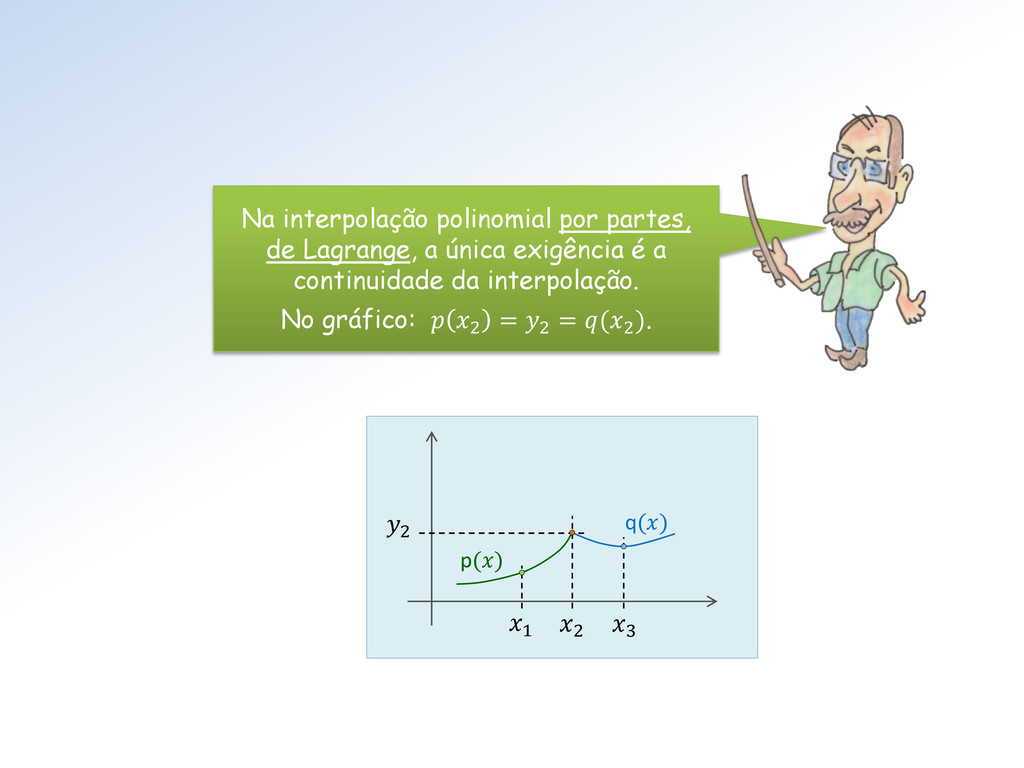
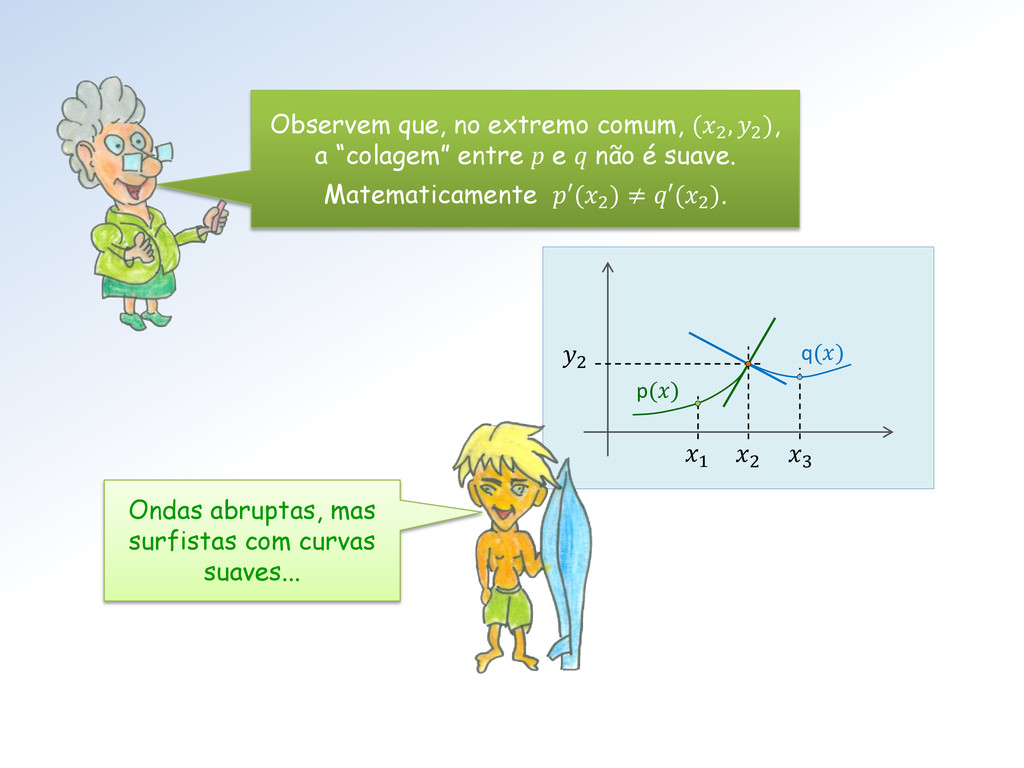
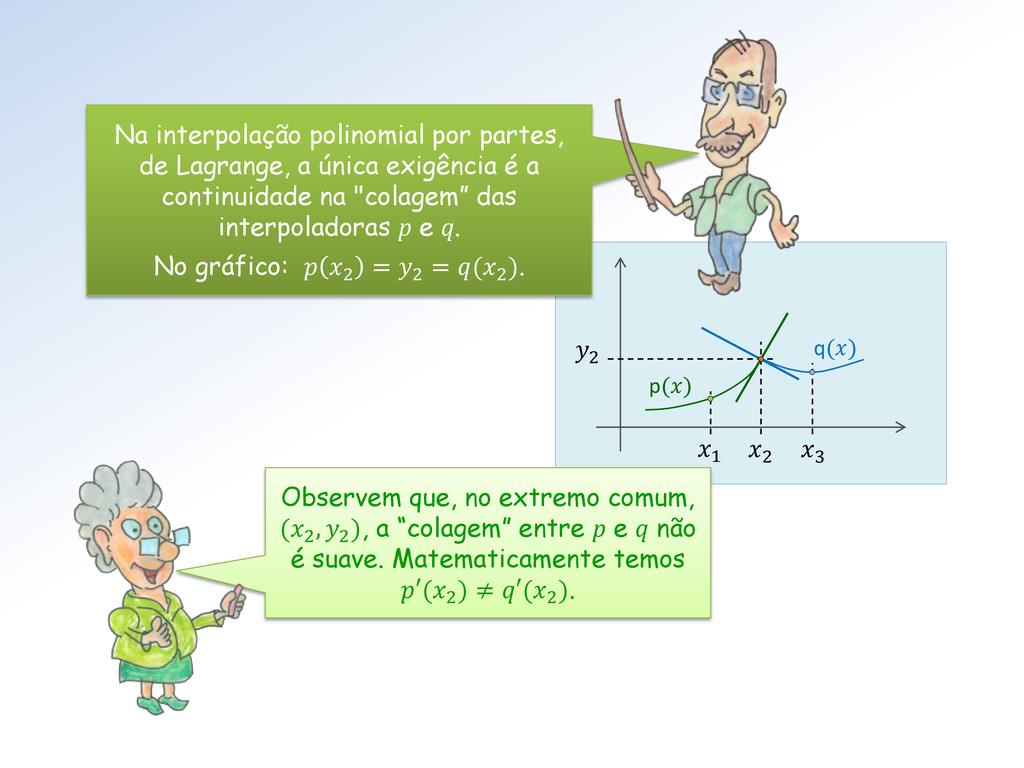
comum, (2 , 2 ), a “colagem” entre p e q não é suave. Matematicamente temos ′(2 ) ≠ ′(2 ). Na interpolação polinomial por partes, de Lagrange, a única exigência é a continuidade na "colagem” das interpoladoras p e q. No gráfico: 2 = 2 = (2 ).
′ 2 = ′ 2 suaviza a colagem, pois obriga a coincidência das retas tangentes. Já vimos que a interpolação por partes, de Hermite, exige, em cada ponto, a igualdade tanto do valor da função, como do valor da derivada da função. O dobro de condições.
′′ 2 = ′′ 2 obriga a mesma curvatura local para as duas curvas. Nessa interpolação por partes de Hermite, são necessárias 3n informações para interpolar n pontos.
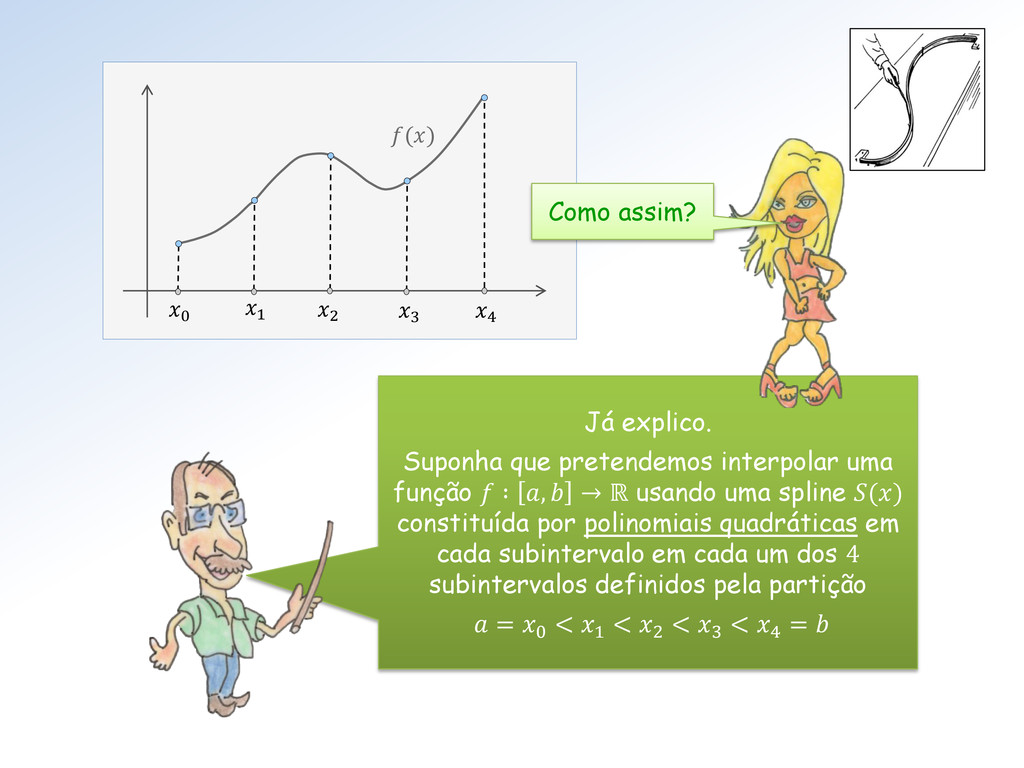
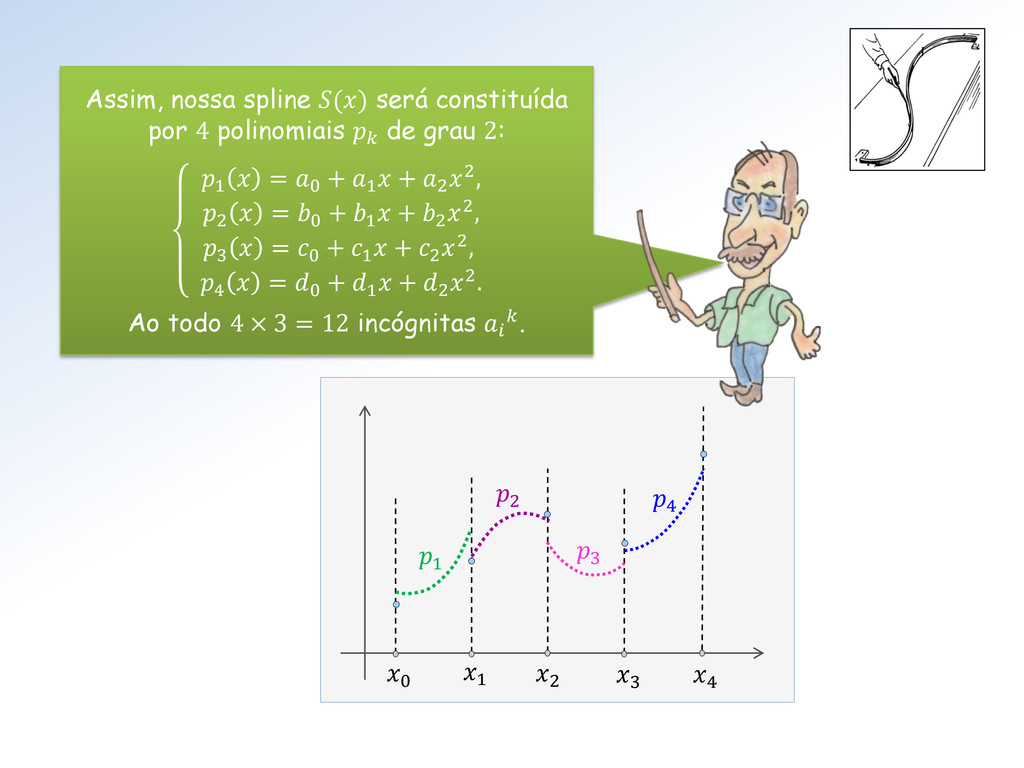
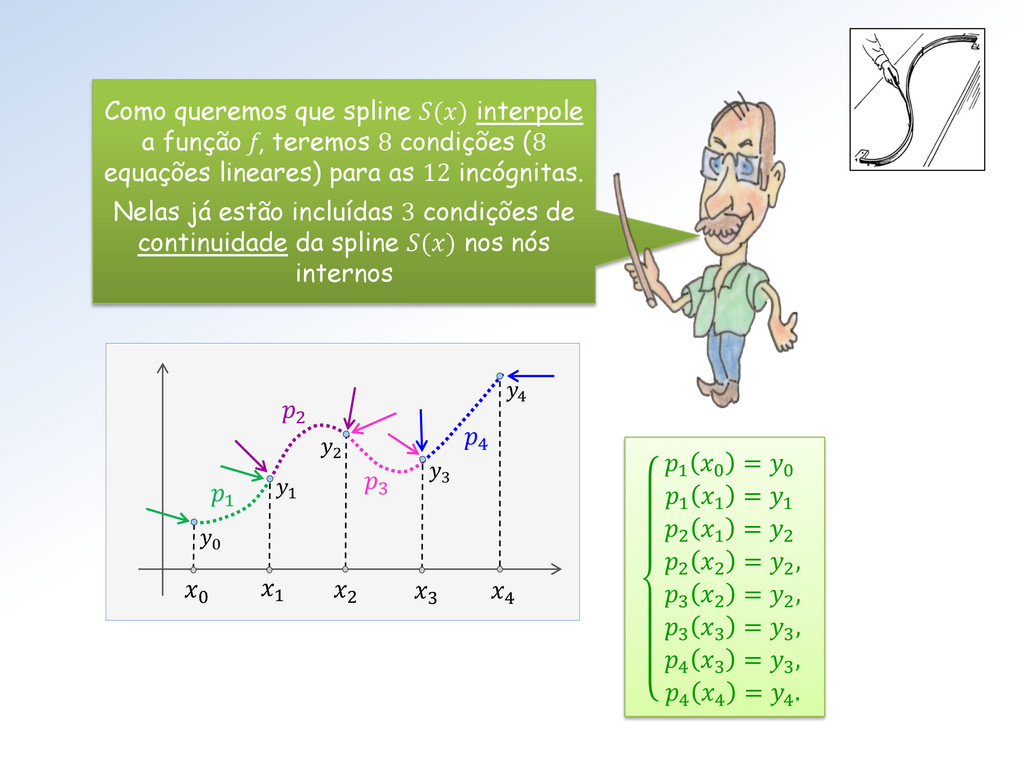
→ ℝ usando uma spline () constituída por polinomiais quadráticas em cada subintervalo em cada um dos 4 subintervalos definidos pela partição = 0 < 1 < 2 < 3 < 4 = () 1 2 0 3 4 Como assim?
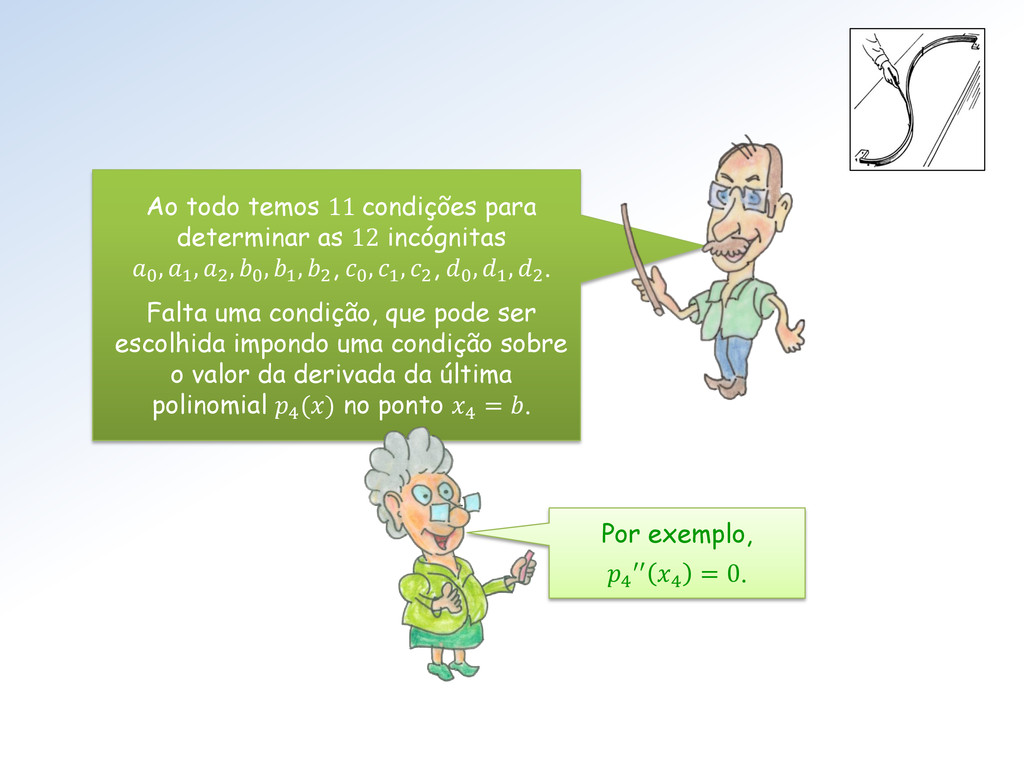
0 , 1 , 2 , 0 , 1 , 2 , 0 , 1 , 2 , 0 , 1 , 2 . Falta uma condição, que pode ser escolhida impondo uma condição sobre o valor da derivada da última polinomial 4 () no ponto 4 = . Por exemplo, 4 ′′ 4 = 0.
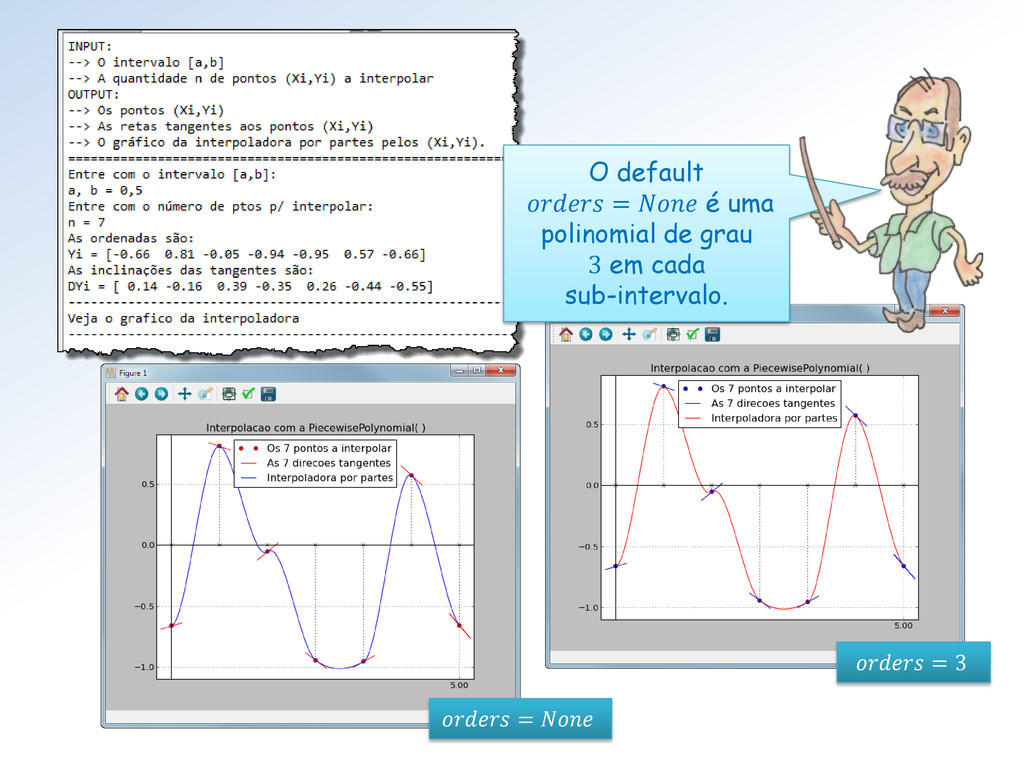
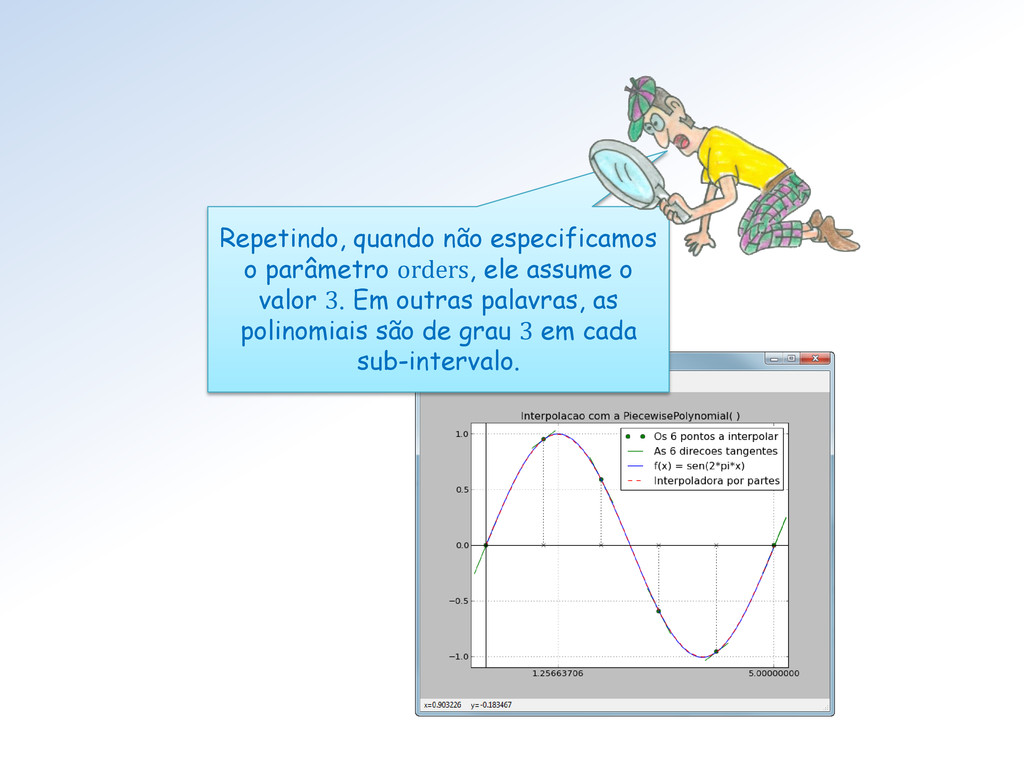
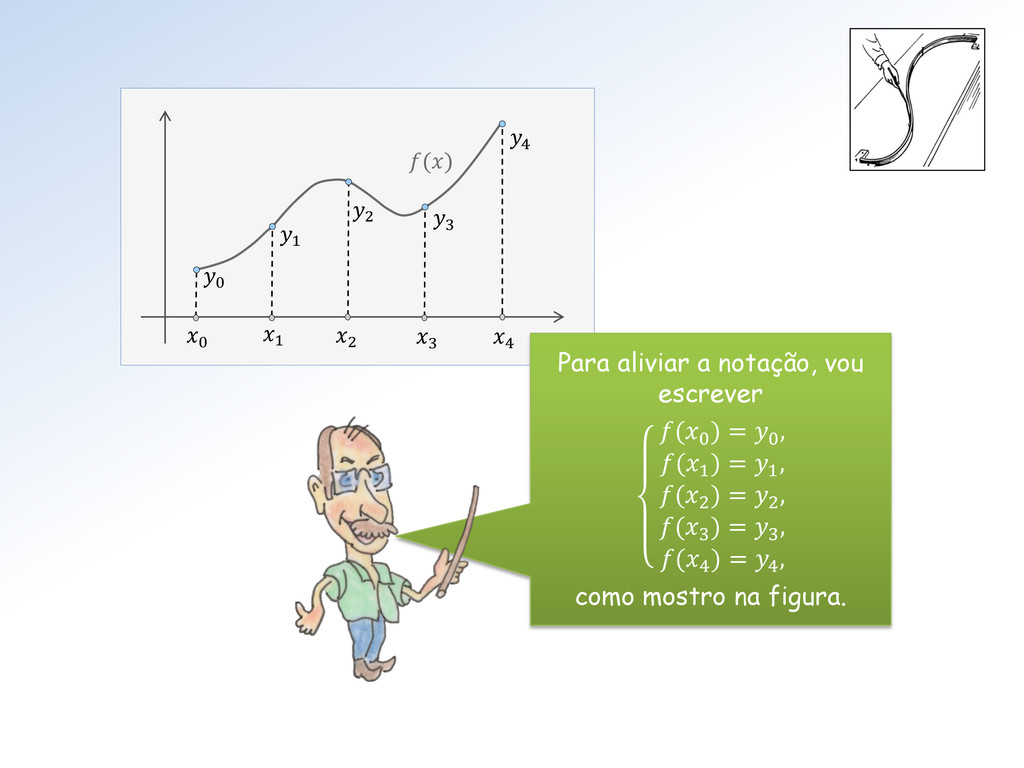
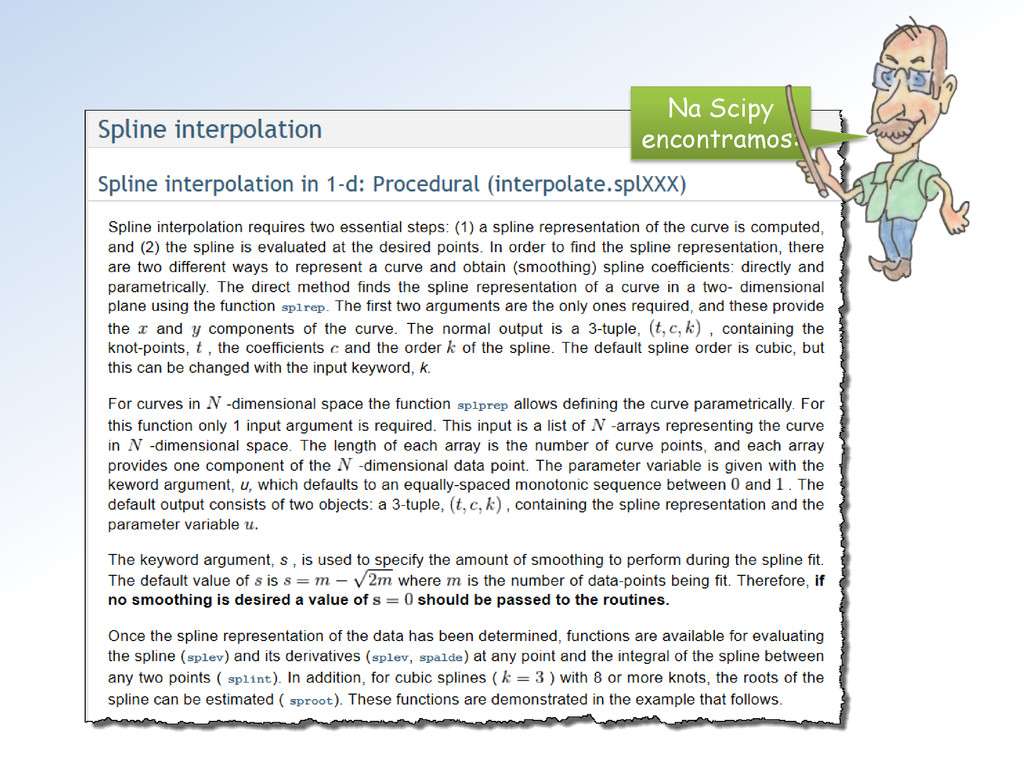
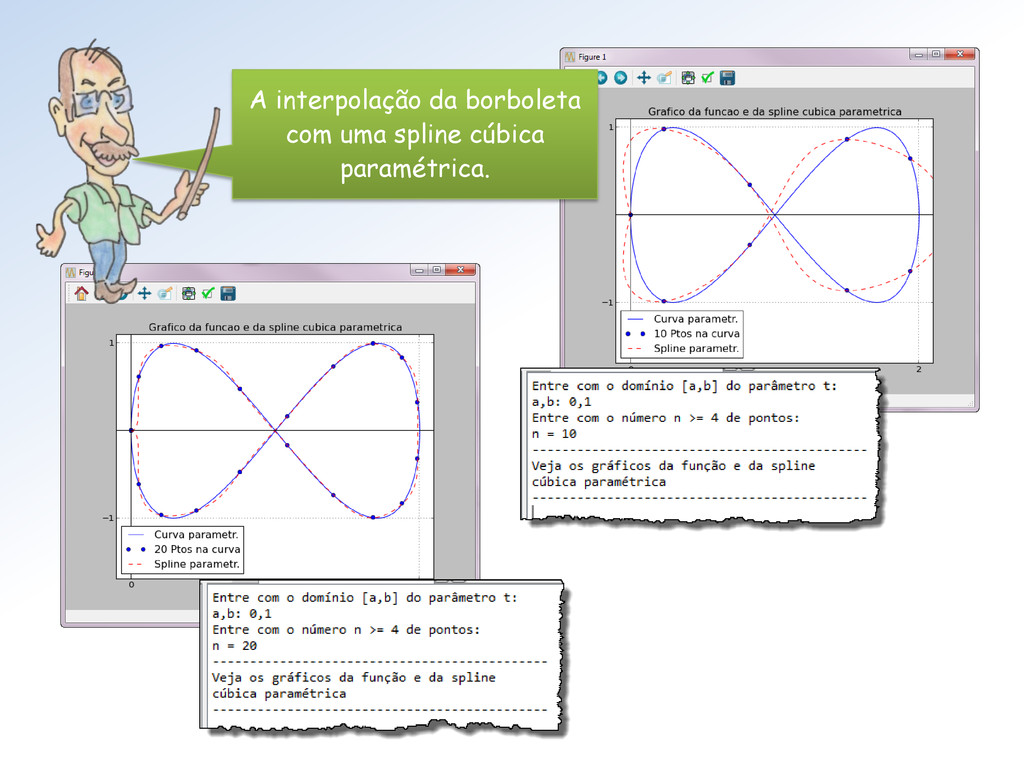
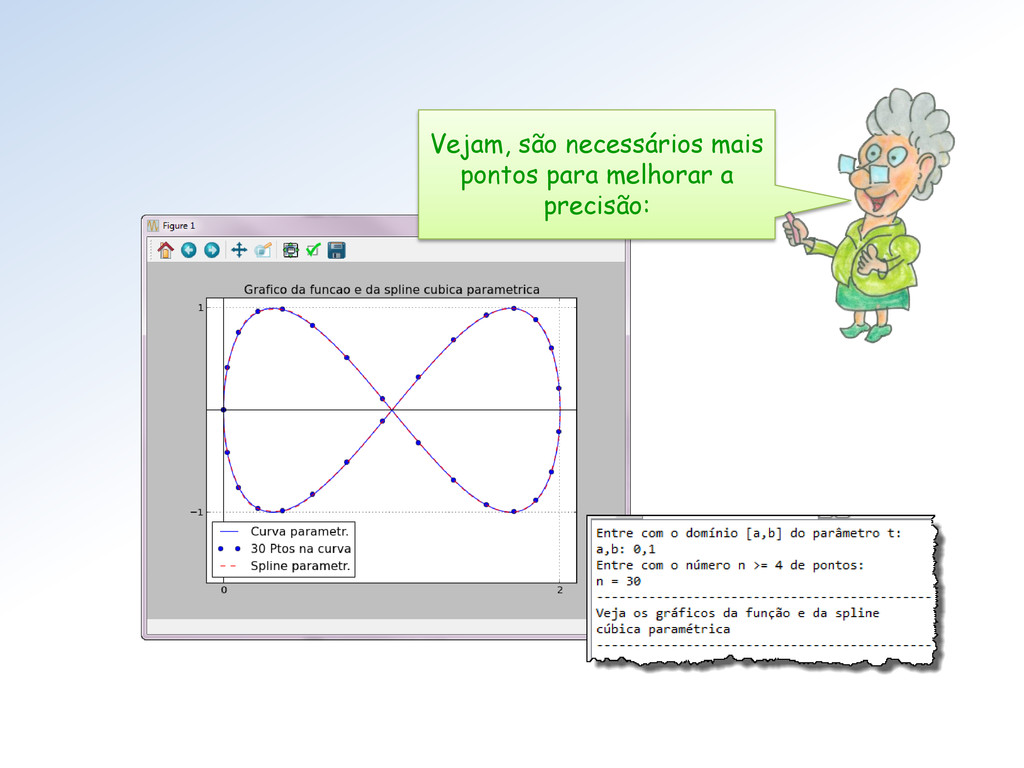
função () é um spline de grau p, com nós nos pontos = 0 , < 1 , < ⋯ < = , quando satisfaz as condições: • Em cada subintervalo , +1 é uma polinomial de grau p, • () é de classe −1 , . () é um spline interpolante quando, além dessas duas condições, satisfaz também: • = , = 0,1, ⋯ , . A definição geral de “spline”. Acabamos de detalhar a construção de um spline quadrático.:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![A cada dois subintervalos consecutivos [−1 , ], [ ,](https://files.speakerdeck.com/presentations/ec285800d137013019be36305ffcde0a/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Seja () uma função definida num intervalo [, ]. Uma](https://files.speakerdeck.com/presentations/ec285800d137013019be36305ffcde0a/slide_54.jpg){kind=link}
![Uma “spline” cúbica interpolante: É uma função : [, ]](https://files.speakerdeck.com/presentations/ec285800d137013019be36305ffcde0a/slide_55.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}